无验潮水深测量测深精度分析及检验
2022-04-02乐吴年丰张
欧 乐吴年丰张 建
1海军南海工程设计院,广东 湛江,524006
2中国海警局直属第三局,广东广州,520320
3中国电建集团青海省电力设计院有限公司,青海 西宁,810008
随着RTK(real-time kinematic)测高精度提高且可靠性得到保证,利用实时的接收机三维坐标,结合测深设备能够直接推算出实时水下高程,即无验潮水深测量方法随之而生。RTK技术自动化程度高,能够全天候不间断地作业,大大减少了测量人员的劳动强度。20世纪末,德国联邦海事局和汉诺威大学大地研究院合作,对利用GPS大地高信息进行水深归算进行了试验论证,成果分析表明DGPS(differential-GPS)/OTF技术能够提供很好的测高精度,不受水位、吃水、涌浪影响的实时水深改正将成为可能。桑金[1]在国内较早地采用了GPS大地高的信息进行水深改正,认为这是一种实时的、与动吃水无关的、无验潮站的水位改正方法,可认为是我国无验潮水下地形测量的初步探索。李凯锋等[2]利用无验潮水深测量系统定位设备,采集了静态和动态两组定位数据,从静态和动态定位两个方面分析了不同长度基线的解算结果。结果表明:基线长度在40 km范围以内,定位结果完全满足测量精度要求。随着GNSS定位精度的提高,以及CORS等技术带来的操作便利,无验潮测水深技术也得到了大规模的拓展,应用更加广泛[3-9]。
1 两种水深测量方式的原理
1.1 验潮水深测量原理
测船上由RTK技术实时获得接收机的平面位置(x,y),由测深仪测出换能器与水底间垂直距离S,验潮人员定期观察记录水位值H验潮,内业处理,结合换能器吃水h,推算出各个水底定位点的高程,如图1所示。

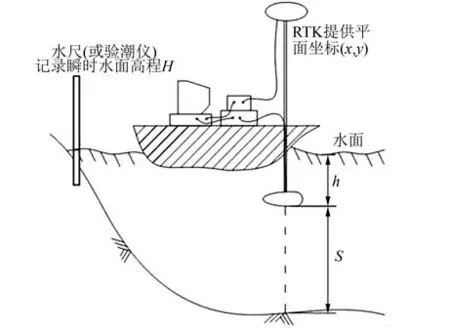
图1 验潮水深测量示意图Fig.1 Non-Tidal Observation Survey Method Diagram
1.2 无验潮水深测量原理
联测带有潮位高程基准的高程点,将RTK给出的大地高改正至和潮位高程基准,而后,通过RTK技术直接获的接收机天线中心的三维坐标(x,y,H),测深仪同步给出换能器与水底的距离S,结合测杆长度L,直接获取水底定位点的高程,如图2所示。
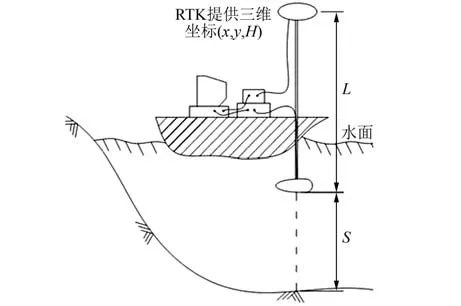
图2 无验潮水深测量示意图Fig.2 Tidal Observation Survey Method Diagram
理想情况下,水底深度实时获得,几乎不需要后处理工作。

顾及测船姿态因素的影响,式(2)中的测杆长度L需换算至GNSS天线中心到换能器之间的真实垂直距离,换能器至水底的距离S也要换算至水底点垂直至水面的距离,同时更新测深记录点的平面位置,相应内容在§2.2节进行论述。
在大面积水域(海洋)测量中,由于上下游水位存在坡降比,大面积测量范围还存在高程异常不均匀的情况,往往需要在水域测区内分设几处验潮点,不仅费时费力,而且在复杂海域并不易实现,此时无验潮方法显示出其独特的优越性。
2 无验潮水深测量精度分析
无验潮水深测量的精度受到测深系统安装、测船姿态、测区高程异常等方面影响。
2.1 水深测量系统安装的影响
根据水底高程计算式(2),测深精度包括测深仪测深精度MS、接收机天线至换能器零点的测量精度ML,以及RTK获取高程的测量精度MRTK3个方面,见式(3)。

工程测量规范[10]中对测深点的深度中误差的要求如表1所示。
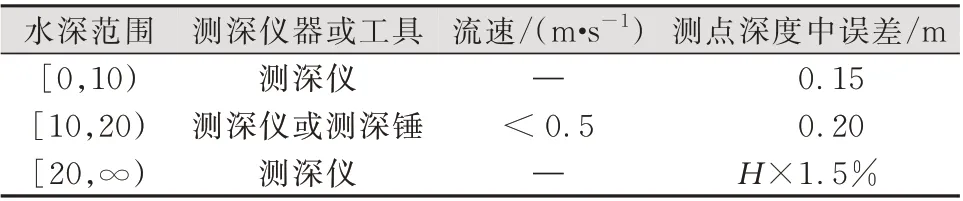
表1 测深点深度中误差Tab.1 Sounding Point Depth Mean Square Error
基于RTK的技术特点,其成果精度存在距离效应,因此在实际操作中要控制好作业范围,必要时可多次架设基站。考虑较差情况,取接收机中心高程精度为MRTK=±8 cm(实际测量中可达±5 cm以内);使用精度±1 mm的钢尺量取连接杆的长度,取3次均值为结果,则ML=±0.6 mm;根据经验,中海达单波速测深仪在水深45 m左右水域进行测量时,实测偏差可达到4 cm,而且深度越大测量精度越低,取最不利情况下的测量精度MS=±10 cm。可计算出水底点高程精度MH水底=±12.8 cm,能够满足表1的要求。
2.2 测船姿态的影响
在实践中,测船姿态对高程的精度有较大的影响。如图3所示,在船体发生晃动时,虽然RTK能够获得较好的水平位置精度,但此时RTK反馈在成果中的平面位置O对应的水底D点,与测深仪实际探测的水下高程点D’点并不一致,造成高程误差Δ=OD-OD′。

图3 测船倾斜造成高程测量误差示意图Fig.3 Elevation Errors Cause by Inclination
事实上,换能器杆安装偏差与测船倾斜造成影响是一致的,文献[11]指出,该类误差属于偶然误差,在单波速测量时,测船倾斜的影响与换能器杆的安装偏差可一并考虑。
值得注意的是,当DD′位于陡坡,或船体倾角较大时,通过图3,可以直观地看出,产生的高程误差将是非常可观的,必须加以考虑。针对此,需要避开可能造成测船姿态差的恶劣测量环境,在测船上加装姿态测定仪将高差改正为Δh=OD′cosα,再根据水平方向的两个姿态角β,γ将定位点由O改正至O′。
2.3 测区高程异常的影响
水域测量图的图载水深普遍采用当地理论最低潮面为深度基准面[12]。当地理论最低潮面常取在当地多年平均海面下一定深度l位置,RTK高程基准的参考椭球面,与前述平均海面之间存在一个差值,即高程异常Δ,通过l值和Δ值,能够将RTK高程改正至深度基准面中来。一般认为在同一区域l值为一固定值。高程异常Δ需要在实地联测水准点加以检验,当测区较小时,可认为Δ为一固定数值;当测区较大时,考虑高程异常分布不均匀的情况,需要进行似大地水准面精化,求取测区Δ模型。当水下测图需求为独立高程系统时,可不考虑此项。
3 精度检验
基于海南省某海岸水域水下地形测量实例,对无验潮水深测量的高程精度进行统计检验。测区顺海岸方向2.5 km,至海岸线起往海方向0.45 km,使用中海达HD-370单波束测深仪结合GNSS RTK技术进行测量,在无验潮水深测量的同时,也进行验潮工作,最后得到两套成果,即无验潮水下地形成果和验潮水下地形成果。
3.1 无验潮水深测量精度
在测深作业的各个深度级水域将仪器推算的水深与水坨测值比对,实测水底高程精度能够满足表1的要求。比较检查线与测深线交叉处水底高程值,检查线基本垂直于主测深线,总长度大于主测线长度的5%,检查线与主测线相交处图上1 mm范围内水深点,高程差值基本在0.1 m以内,最大差值为0.15 m,如表2所示。

表2 检查线统计表Tab.2 Test Line Statistical Table
3.2 无验潮成果与验潮成果比较
假定验潮测量成果为“真值”,对两套成果中的4 111个同名测深点高程进行比对分析,如表3所示。
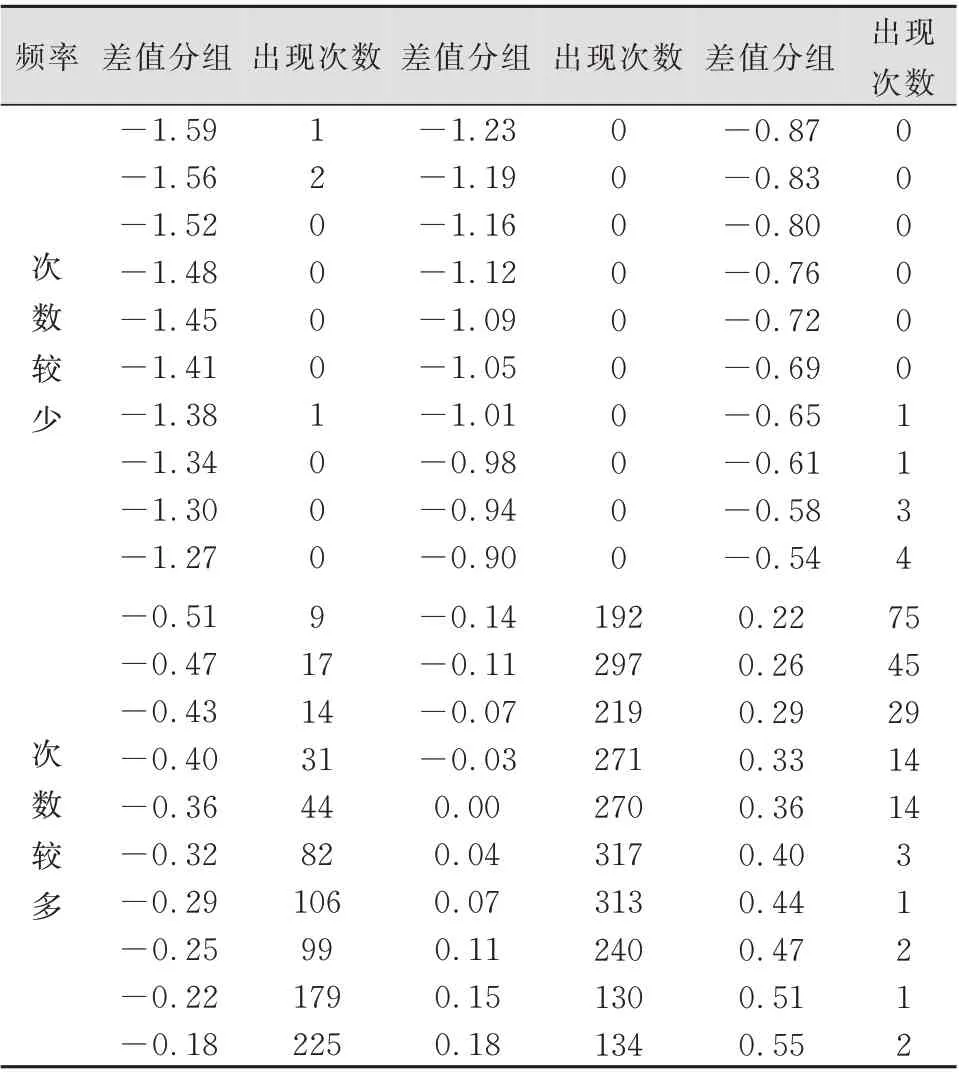
表3 无验潮与验潮水底高程(绝对值)差值分布表/mTab.3 Elevation Difference(Absolute Value)Distribution Table Between Non-Tidal and Tidal Observation Survey Method/m
通过表3可以看出,绝对值差值在(-1.6,-0.7)区间出现次数极少,仅4次,不足样本总数的0.1%,认定其为粗差予以剔除。出现次数较多的区间差值绝对值绝大部分集中在0附近,即两套成果值相当。分析各分段差值出现的次数,可以看出,这些差值服从高斯正态分布,经过计算,其服从一个数学 期 望μ=0,方 差σ2=0.013的 正 态 分 布N(0,0.013),即差值的分布具有集中性、对称性、均匀变动性。如图4所示。
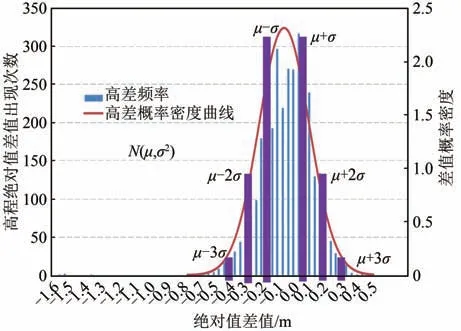
图4 无验潮与验潮水底高程(绝对值)差值概率曲线图Fig.4 Elevation Difference(Absolute Value)Probability Curve Between Non-Tidal and Tidal Observation Survey Method
根据表3和图4分析,可以从以下两个方面说明无验潮与验潮水底高程值之间的关系。
1)根据正态分布的特点,标准差σ越小,分布越集中在μ附近,σ=1为标准正态分布,本案例中σ=0.12,表示两套高程值绝对值差值较集中于0,即两套值的4 000余样本整体较为接近。
2)将图4中曲线及坐标轴截图插入AutoCAD软件,求取封闭面积的值。假设概率分布曲线与横轴所围面积为S,μ±σ所围面积为S×67.9%,μ±2σ所围面积为S×93.6%,μ±3σ所围面积为S×99.2%,与正态曲线对应的68.3%、95.5%和99.7%基本一致,支持了两套样本基本一致的判断。
4 结束语
鉴于全球导航卫星系统星空组网的特点,在某些特定区域,RTK获取的三维坐标精度仍不够高,尤其是高程精度[5,11]。同时,在对海域进行水下地形测量时,由于大海是开放式的,缺少等级水准点,利用陆上的高程控制点进行高程异常拟合只能采用外推的方法,离岸距离越远,精度越低。此时还是需要进行验潮式的水深测量,或通过验潮来提高高程异常拟合的精度[13,14]。
当测量条件适宜时,无验潮水深测量的测深精度能够满足测深精度要求,而且成果与验潮式的成果相当,效率高、用工省,经济效益好,值得在进行水下地形测量中探索使用。