基于图像识别的自动移栽设备控制系统设计
2022-04-02王建龙贾思思王红杨晓东
王建龙 贾思思 王红 杨晓东
关键词 移栽 摄像头 图像识别 自动化
1引言
蔬菜是人们生活中必不可少的食物,随着国民经济不断发展,人们对蔬菜的种类、质量要求越来越高,加上各项农业政策的引导,蔬菜种植呈现出快速发展的趋势。通常而言,在种植蔬菜的过程中,首先要进行育苗,幼苗达到一定要求后再移栽到种植环境中。目前,我国蔬菜的移栽环节多由人工完成,这势必消耗大量人力成本,并降低移栽效率[1] 。诸多企业在自动化生产上进行了相关开发,国外企业的研究值得我们学习和借鉴,特别荷兰和美国等农业发达国家的经验值得我们学习[2] 。其先进的设备除了机械化设计合理、电动系统性能好之外,还搭载了大量的传感器,以保证设备正常工作。
传统农业机械设备传感器包括超声波传感器、红外线传感器、霍尔传感器、涡流传感器等,这些传感器的功能相对简单,方便使用,但其应对复杂环境的能力不足,只适用于某些固定场合。随着基础科学不断发展,越来越多的新型数据采集传感器被农业机械设备所应用,摄像头便是其中一员。
摄像头是一种图像采集设备,其采集图像后,需通过相关程序和算法对图像进行处理,据此提取图像中的有效信息,为系统提供数据支撑。
2硬件系统设计
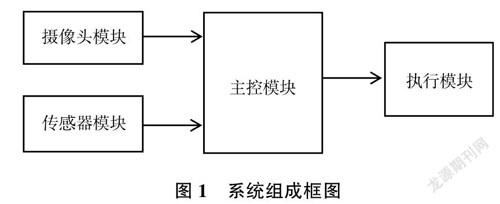
由于需要实现对路径的识别和栽种效果的检测,从而给主控制器提供决策依据,因此该系统应具备数据采集模块和执行模块,以达到对模拟设备的控制的目的和预期效果,使设备稳定运行。数据采集模块分为摄像头视频图像采集部分和各类传感器部分;执行模块主要为机械设备提供动力。硬件模块组成框图如图1 所示。
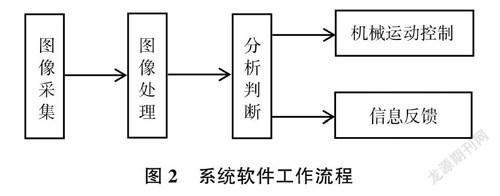
基于硬件系统,该系统软件的主要工作是执行图像采集、处理,从而提取有效信息,并控制机械部分进行联动。软件处理流程如图2 所示。
3硬件模块选择
本文主要阐述该系统的硬件电路部分,即图像采集、核心处理器、显示器和驱动电路。因系统需处理较多的图像数据, 故选择拥有Cortex?M4 内核的STM32F407VET6 型处理器,其数据处理速度快,IO 端口充足,可以连接多种接口摄像头。图像采集选用OV7725 摄像头,其分辨率为30W 像素,并配有FIFO,能够与处理器高效配合,快速完成多帧图像的采集。显示器采用SDWb070T84T 型彩色液晶显示屏,其显示数据类型丰富,接口简单,可灵活应用于系统调试和工作状态显示。驱动电路采用MOS 管搭建互补输出驱动,以增大输出电流,改变输出电压,从而适应动力部分的控制需求。
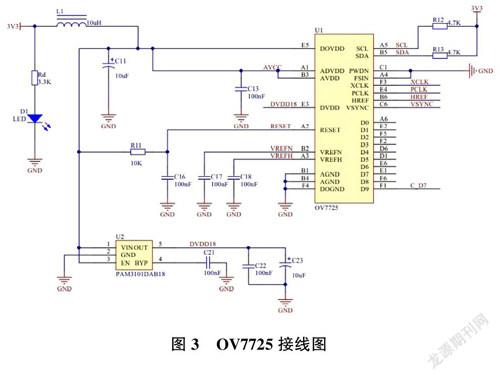
摄像头模块需要3.3V 供电。除电源外,还有16根数据线,其中包括D0 ~ D9 共10 根数据线以及VSYNC、HREF、PCLK、XCLK、SCL 和SDA。我们根据系统使用情况,采用串行通信传输,即使用SCL 和SDA 的IIC 接口形式(见图3)。
4图像数据采集处理
移栽是否成功、幼苗是否完整、苗情如何等信息需通过该系统对图像数据进行分析。图像数据由摄像头进行采集,如何将一帧图片转换成有效信息,则需分为如下几步。
4.1彩色图像灰度转换
由于幼苗颜色和土地颜色相差较大,可以利用两者颜色的色差对图像信息进行扫描标定。然而由于彩色图像信息量较大,相较于灰色图像而言,其处理速度较慢,且由于幼苗颜色和土地颜色相差较大,灰度值相差也较为明显,所以处理成灰度图像会让数据量成倍减少。图4 为采集的幼苗初始图像,图5 为转换后的幼苗灰度图像。
4.2灰度变换
灰度变换是常见的图像处理方法,其基于空间域像素进行点对点变换。利用特定的数学函数关系将图像中每个像素点对应的灰度值转换成新的灰度值,再通过灰度对图像进行拉伸,可以改变图像的对比度,使图像变得更加清晰,目标特征也就更明显。
指数变换、对数变换、幂次变换、灰度拉伸、灰度均衡等方法是常见的灰度变换方法。图6 为指数变换效果,其能够拉伸图像中的高亮区,压缩图像中的低亮度区。
对数变换与指数变换相反,前者拉伸的是图像中的低亮区,压缩图像中的高亮度区,效果如图7 所示。
幂次变换可以将部分灰度区域映射到更宽的区域中。当扩展低灰度级时,需要压缩高灰度级,使图像变亮。当扩展高灰度级时,需要压缩低灰度级,使图像变暗。效果如图8 所示。
灰度拉伸又叫对比度拉伸,其实现原理是使用了最简单的线性函数,即提高灰度级的动态范围,可以拉伸某段灰度区间以改善输出图像,使亮度高的部分更亮。效果如图9 所示。
在灰度均衡方法中,首先统计灰度级中每个像素在整幅图像中的个数,然后计算每个灰度级占图像中的概率分布,并且计算累计分布概率,再计算均衡化之后的灰度值,最后映射回原来像素的坐标的像素值。效果如图10 所示。
综合上述处理方法的效果来看,指数变换和幂次变换的图像增强效果比较明显,能够将背景部分进行压缩,同时对幼苗进行高亮显示,并且这两种算法的实现过程比较简单;灰度拉伸的背景和幼苗对比相对清晰,但并不明显;对数变换和灰度均衡处理效果可以明显得出不适合幼苗图像处理。综上所述,对幼苗图像的对比度进行增强时,指数变换和幂次变换的处理效果较好,对比度有明显增强,更加清晰更容易识别。结合后期处理,本系统采用指数变换进行灰度变换。
4.3图像分割
图像处理的关键在于分割,即在整图中将有效信息或需要检测的目标提取出来。其中,清楚有序提取信息和目标就是图像分割技术。随着技术和设备不断发展,分割技术也不断改进。常见分割技术包括基于灰度阈值的分割技术、基于预设区域的分割技术、根据对比度进行区分的分割技术。任何分割技术都有自身优势和所适应的场景。我们需要根据场景的变化,通过不断优化来对分割技术进行有效选取。
二值化的图像分割是一个典型的标记过程,其原理是将图像标记成0 或1,从而达到切块区分的目的。图像分割主要依靠各种边缘算法,其中模糊聚类算法(FCM)是一种经典的图像分割算法,它对于本系统的图像分割有着典型的指导意义。在进行多次试验后,针对植物幼苗的特征,我们对FCM 逐步进行了优化和改进(主要对易错点的抗造性进行了改进),形成了新的目标函数算法:
式(5)和式(6)为新目标函数下迭代的隶属度和聚类中心表达式,其中聚类中心与式(3)相比并无改变,但其聚类的效果在幼苗识别上有一定的优势,即能够较清晰地辨别苗情[3] 。
应用新的算法对图片进行处理,可以得到清晰辨别幼苗个数的效果,如图11 所示。如果对每一株幼苗的图片再次进行分割,则可以定位幼苗叶片数量,分割识别如图12 所示。
5其他电路设计
在采集图像并对其处理后,得到的数据可以支撑系统机械正常运行,并将系统实时情况进行显示,必要时通过LED 和蜂鸣器进行声光报警。系统机械包括行进运动部分和移栽運动部分,其各部分有独立的驱动模块,需要在单片机上做隔离电压变换,本文不再赘述。在显示器的选用方面,前文已有说明,其电路连接简单,系统控制程序为固定子函数模式,显示板含有蜂鸣器,可以提供必要报警服务,本文也不再赘述。
6总结
采用育苗移栽机械化设备是提高蔬菜种植效率和产能的有效手段。随着种植技术的全面发展,种子、设施都在不断进步,自动化设备也在不断发展。
