飞行器集群协同定位与导航对抗技术发展与展望
2022-03-31武成锋郭晓云胡恩文
武成锋,程 进,郭晓云,徐 骋,胡恩文,綦 航
(1. 复杂系统控制与智能协同技术重点实验室,北京 100074;2. 北京邮电大学电子工程学院,北京 100876)
0 引 言
1997年美军首次提出“导航战”概念,随后又陆续启动定位、导航与授时微技术(Micro-PNT)、自适应导航系统(ANS)、对抗环境下的空间、时间和方位信息(STOIC)和拒止环境协同作战(CODE)等研究项目,旨在提升不依赖卫星的导航能力。俄罗斯、欧洲各国、日本、印度等在导航战框架下也开展了定位导航的干扰与反干扰研究与实践,导航领域已成为军事竞争的战略要地。在不断进化的高强度对抗背景下,单纯依赖全球导航卫星系统(GNSS)已难以建立可靠时空基准,卫星拒止环境下获取高精度、高可靠、自主时空信息的能力,成为打赢未来战争的迫切需求。
未来在信息化、智能化、无人化战场环境下,飞行器集群因具有作战能力强、体系生存率高以及攻击成本低等诸多优势,受到世界各国的青睐。强对抗环境下,飞行器集群遂行协同作战任务的关键是如何获取集群内各飞行器之间高精度、高可靠的相对时空关系。飞行器集群节点之间通过直接或间接相对观测和信息交换、融合处理,获得比单体导航更优的综合导航性能,这种定位导航方式称为“协同定位导航”。协同定位导航主要优势如下:1)通过集群协同,可建立自主可控的相对时空基准;2)利用集群中部分节点的高精度导航信息,可以提高低精度节点的导航精度及整个集群的导航精度;3)通过协同,可将部分节点的误差有界定位能力拓展到整个集群;4)通过集群协同,可识别和修正个别节点的导航故障,提高集群的鲁棒性;5)集群部分节点探测并实现对目标定位后,通过协同,可建立集群与目标之间的相对位置关系。
目前,飞行器集群自主协同定位导航仍存在众多未解决的难题。2019年,Science子刊Science Robotics指出微小型无人机集群的应用主要受限于卫星拒止环境下自主协同相对定位导航技术;2020年,中国科学技术协会把“卫星不可用条件下的无人系统高精度智能导航”作为10大工程技术难题,开展飞行器集群协同定位导航技术研究,并在此基础上,拓展研究集群协同导航对抗技术,对支撑未来强对抗条件下的信息化、智能化作战具有重要意义。
本文在分析相关技术现状基础上,梳理飞行器集群协同定位与导航对抗的技术架构和技术内涵,分析技术难点,并对技术发展趋势进行研判,为未来我国飞行器集群自主时空基准体系构建与导航对抗提供新思路。
1 技术内涵
1.1 技术架构
飞行器集群实现协同定位导航的必备条件有两个:(1)集群内部可实现直接或间接相对测量,例如测距、测角等;(2)集群内部能够建立可靠通信连接,实现测量信息的实时交换。在上述条件基础上,设计协同定位导航算法,对集群内多传感器测量信息进行数据融合处理,实现集群之间相对或绝对时空基准的构建与维持。
集群中部分飞行器或者集群外执行探测任务的探测平台发现目标,以自身为基准建立与目标的相对位置关系,通过集群内信息共享,建立集群与目标之间的相对位置关系,可引导飞行器集群在自主相对时空基准下实现对目标的精确打击。
在飞行器集群自主时空基准构建和维持的基础上,利用集群时空基准一致性高及自主可控的特点,对单体飞行器能量域、时域、空域等多维干扰感知信息进行集群融合处理,可显著提升干扰源数量、强度、来向等干扰参数的准确度和可靠性。集群内多飞行器协同还可进一步实现对干扰源的协同定位。
飞行器集群一旦实现不依赖卫星的自主定位导航,即可利用我方集群飞行器数量多、覆盖空域广的优势,以及敌方抗干扰卫星接收机抗干扰自由度受天线阵元个数限制的缺陷,通过集群分布式组网干扰,以较小代价限制敌方利用卫星信息获取高精度定位授时的能力,形成对敌非对称信息优势,实现从被动防御向主动攻击、攻防一体化作战样式的转变。
在飞行器集群干扰感知与识别的基础上,根据飞行器集群与干扰源动态位置变化,结合集群内各飞行器自身抗干扰性能,可评估推演对抗环境下集群工作适应性。综合考虑集群协同组网干扰效果,可以构建集群实时导航攻防对抗态势,支撑多源融合、航迹规划、干扰打击、区域封控等任务在线优化。
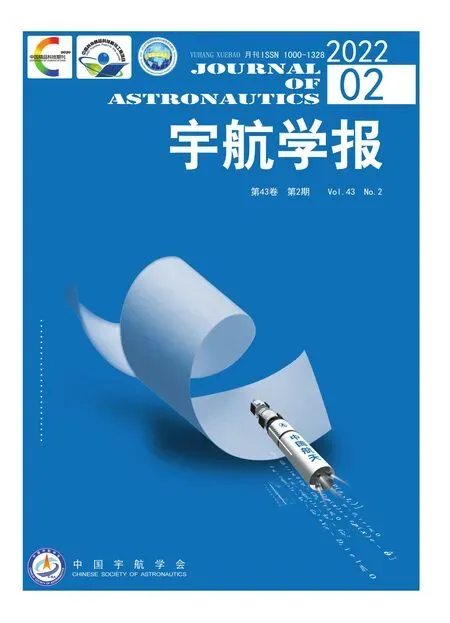
综上所述,飞行器集群协同定位与导航对抗技术架构及内在联系如图1所示。在强对抗环境下,首先通过飞行器集群协同定位导航,构建和维持自主、可靠的时空基准;然后通过集群协同干扰感知,感知识别敌方干扰;再次通过集群分布式组网干扰,实现导航攻击与区域压制;最后构建实时、动态导航对抗态势,实现战场“单向透明”。以自主时空基准为基,技术上层层深入,实现飞行器集群导航攻防对抗一体化体系的构建,共同支撑未来强对抗环境下的智能化作战。
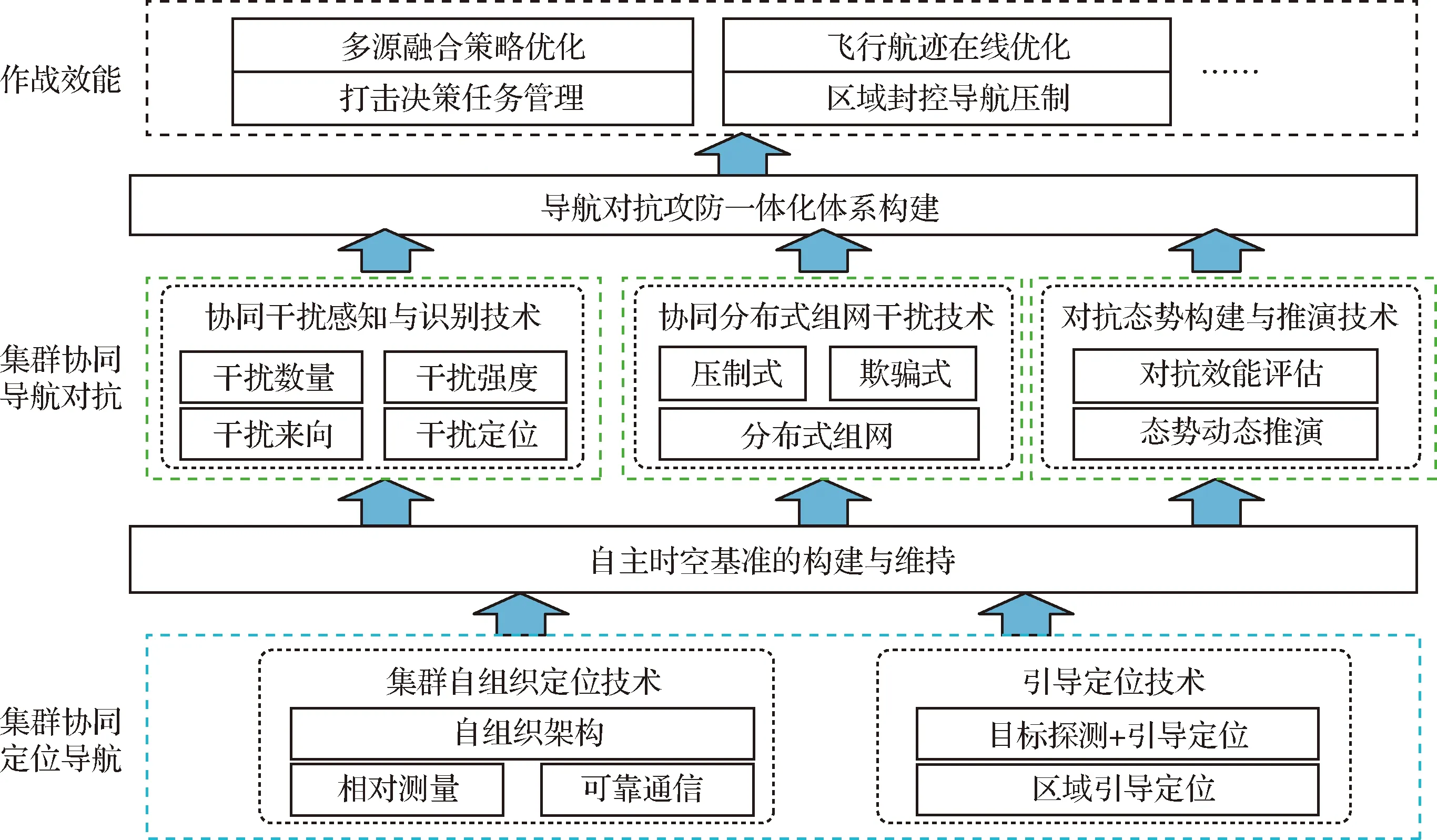
图1 集群协同定位与导航对抗技术架构及内在联系示意图Fig.1 Schematic diagram of framework and relationship of cluster collaborative positioning and navigation countermeasure
1.2 集群协同定位
..集群自组织定位
飞行器集群协同定位技术作为新兴的研究方向受到了世界各国的广泛关注,通过集群内部节点之间相互测量与信息融合处理,实现节点之间的自组织相对定位。在此基础上,建立集群内部相对定位与惯性测量之间的映射关系,利用高精度相对定位结果修正惯性导航误差,抑制惯性误差的发散速度,提高综合定位精度。同时,利用集群的一致性特点,对节点故障进行识别、隔离和恢复,并提高集群定位的可靠性。
从数据融合架构来看,飞行器集群协同定位导航技术架构如图2所示,可以分为集中式、分层式和分布式。集中式架构指定一个中心统一对各飞行器测量信息进行集中处理,之后在集群内分发。该方式优点是数据全面、工程实现难度小,缺点是数据量大、信息处理时间长、抗毁能力差(一旦中心失效,整个集群将失去依托);分布式架构属于“无中心”架构,集群中各个飞行器的测量信息在本地进行局部融合,并通过通信实现信息共享,某一飞行器出现故障不会影响集群的正常运行,具备更强的鲁棒性,对抗条件下生存能力强。但分布式算法对计算资源和通信资源要求高,工程实现难度大;分层式架构根据飞行集群性能或类型分类,将飞行器集群分为多个子群,每个子群根据自身特性进行集中式或分布式信息处理。该方式兼顾了性能和实现难度。

图2 飞行器集群协同定位导航数据融合架构Fig.2 Data fusion architecture of aircraft cluster cooperative positioning and navigation
从飞行器集群之间相对测量方式来看,集群之间相对测量方式如图3所示,一般包括数据链、超宽带(UWB)以及视觉等。数据链进行测距、测向等,可以适应较大空域范围飞行集群编队飞行需要;UWB一般用于测距,要求集群内飞行器之间距离较近,适用于无人机小范围密集编队飞行;视觉测量一般应用于小范围区域无人飞行器协同定位,例如空中加油机和受油机之间的相对定位、室内外无缝定位等。
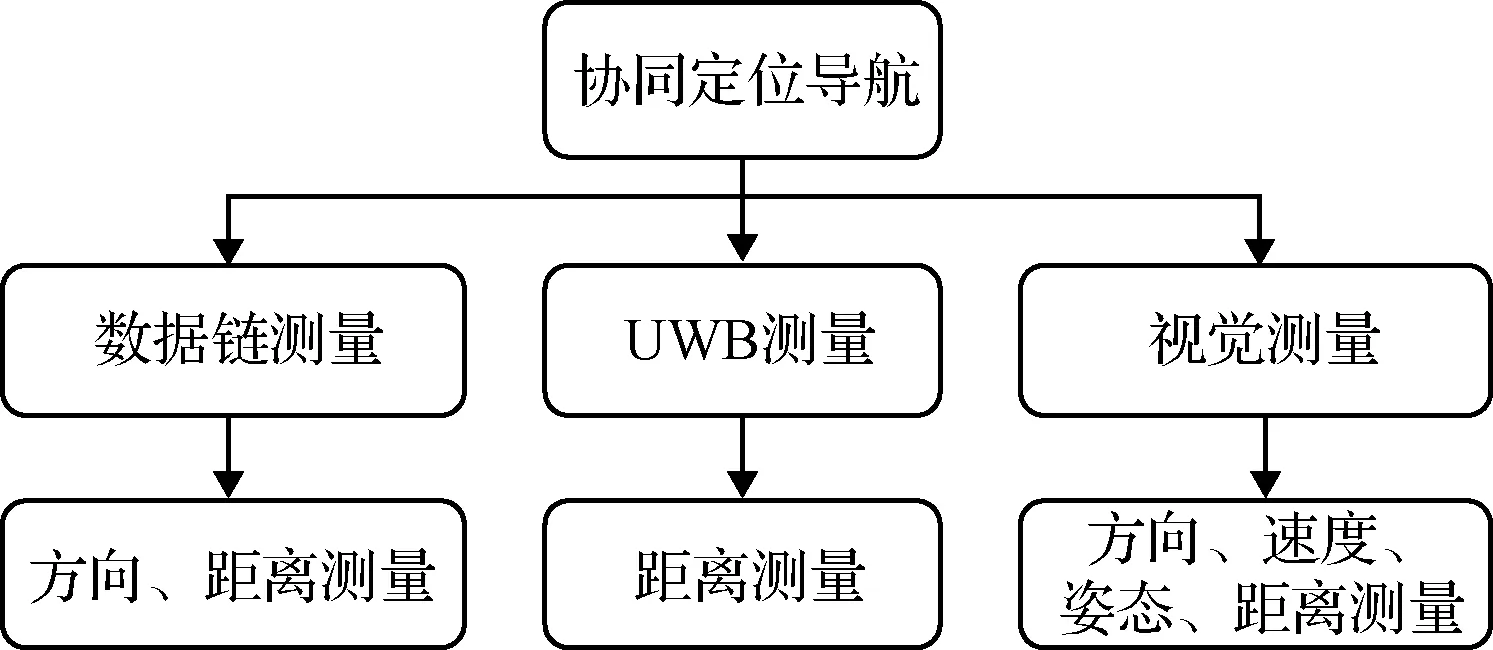
图3 飞行器集群协同定位导航测量方式Fig.3 Cooperative positioning and navigation measurement methods of aircraft cluster
从集群协同定位技术的核心理论算法来看,集群协同自组织定位导航算法,主要包括基于优化理论的协同导航算法、基于图论的协同导航算法和基于贝叶斯滤波框架的协同导航算法三大类,并通过与惯性测量信息的融合,提高集群协同相对定位精度。基于优化理论的集群自组织导航算法,将集群导航问题转化为复杂的多约束多目标优化问题。通过不同的数理优化方法对协同导航信息进行推导获得相对可靠的导航信息估计;基于图论理论的集群协同导航算法将协同定位问题抽象为测量图模型,将单体平台看作图节点,不同载体传感器之间的测量值视作测量图的边,表示集群间的约束关系,进而用图论表达节点之间的拓扑关系。通过对集群节点间的相互约束条件进行分析,对整个编队的定位导航问题进行求解;基于贝叶斯滤波框架的协同导航算法,按照滤波方式的不同可以分为卡尔曼滤波和粒子滤波等。针对高斯线性系统和弱非线性系统可以采用拓展卡尔曼滤波方法,强非线性系统可以采用无迹卡尔曼滤波进行求解;粒子滤波基于蒙特卡洛思想,不受系统线性与否的影响,适用于任何用状态空间模型表示的系统,能够近似测量完整的非高斯概率分布。根据协同集群的滤波器架构不同,可分为集中式滤波以及分布式滤波。集中式滤波状态量完整,可以较好地估计实时状态,但高维状态向量会对整个系统计算量、通信量提出较高要求;分布式滤波兼顾了计算量、通信量、估计性能等因素,易于工程实现。
..跨域引导定位技术
通过集群自组织协同定位技术,可以在集群内部建立并维持一套自主时空基准。在集群自主时空基准的基础上,可以进一步将集群的定位能力拓展开来,通过探测将目标纳入集群内部时空基准,或为局部区域其它平台提供引导定位服务,形成“跨域引导”定位能力。
跨域引导定位技术是支撑多域协同作战的重要技术之一,根据实现方式不同,主要包括下述两种方法:
1)探测引导定位
探测引导定位旨在探测发现目标并建立飞行器集群与目标之间的相对位置关系,从而无需知道目标的绝对位置,仅依靠相对定位即可遂行对目标的精确打击。根据探测平台的不同,探测引导定位分为集群内飞行器探测引导定位和集群外探测平台探测引导定位。
集群内某一个或多个飞行器探测发现目标,以自身为基准,独立或联合实现对目标的相对定位,并通过坐标转换,将目标位置信息统一到集群内部时空基准,并在集群内部分发共享,引导集群内其它飞行器建立与目标之间的相对位置关系。集群内探测引导定位示意图如图4所示。
图4 集群内探测引导定位示意图Fig.4 Schematic diagram of detection guidance and positioning in aircraft cluster
集群外其它探测平台(无人机、有人机、车辆、舰船、人员等)探测发现目标,以自身为基准,实现对目标、对集群内飞行器的定位或观测,并将对目标的定位或观测结果通过通信链路传递给集群内部分飞行器,从而构建集群内飞行器与目标之间的位置关系。当集群内多个飞行器建立起与目标之间的位置关系后,即可将目标坐标转换到集群相对坐标基准内。集群外探测引导定位示意图如图5所示。

图5 集群外探测引导定位示意图Fig.5 Schematic diagram of detection, guidance and positioning outside aircraft cluster
2)区域导航引导
飞行器集群在维持内部高精度时空基准的前提下,以自身为导航基准源,对外辐射导航电文信号,提供导航定位服务。区域内其它平台通过对导航电文信号的接收、定位解算处理,实现基于飞行器集群的区域导航引导。区域导航引导示意图如图6所示。
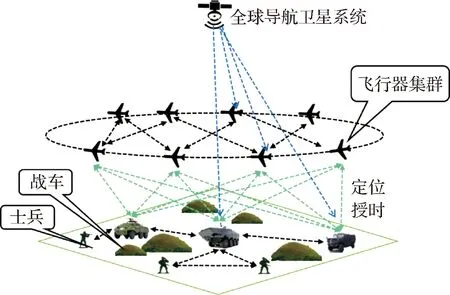
图6 区域导航引导示意图Fig.6 Schematic diagram of regional navigation and guidance
1.3 集群协同导航对抗技术
导航战背景下,如何利用飞行器集群在自主时空基准方面的优势,构建攻防一体导航对抗体系是值得探索的课题。
..协同干扰感知与识别技术
卫星定位导航技术本质是一种基于卫星信号到达时间(TOA)测量的空间定位方法,信号能量、信号传输时间、信号空间位置是最为重要的三个要素。针对卫星信号的干扰一般从能量、时间、空间三个维度着手,通过功率压制或信号欺骗方式使得卫星定位精度下降、定位错误甚至无法定位。
单一飞行器基于阵列天线信号处理,例如波达角(Direction of arrival,DOA)测量等,可以感知识别干扰数量、来向、强度等参数。但是由于信息有限,干扰感知识别的准确度和可靠度有待提高,特别是对于渐变诱导式欺骗干扰识别效果差。飞行器集群时空一致性高、信息丰富的特点,将成为感知敌方干扰的重要优势。
多飞行器协同测量,可实现对干扰源的定位。对于大空域范围分布的飞行器集群,敌方干扰机难以同时对所有飞行器实施精准、能量可控的干扰。在单一飞行器干扰感知的基础上,基于集群自身时空一致性高及信息丰富的特点,对多飞行器干扰感知结果进行融合与校验,可显著提高压制干扰和欺骗干扰识别的可靠度。同时,还可提高对渐变诱导式欺骗干扰信号的识别能力。
飞行器集群对干扰来向、干扰个数、干扰强度以及干扰位置的准确、可靠识别,将为干扰态势构建和导航对抗推演提供支撑,进而为优化飞行航迹规避干扰、召唤反辐射导弹打击干扰、干扰告警、抑制干扰等应对措施实施赢得主动,最大程度降低敌方干扰对我方时空基准的影响。
..协同组网干扰技术
相对于干扰感知识别、抗干扰等技术,限制对手利用卫星导航信息的能力属于进攻性“导航战”措施。
大功率干扰机通过功率压制方式使抗干扰卫星接收机射频前端饱和或抗干扰算法失效,但大功率干扰信号战时很容易受到敌方反辐射导弹的攻击,生存能力差。为提高干扰信号功率,一般采用波束形成技术以获取高增益波束,由于干扰机构成复杂,干扰信号波束角窄,需与探测系统协同工作,使用和保障难度大。
卫星接收机对干扰信号的抑制一般通过对阵列信号的空域、时域自适应滤波处理来实现。空域自适应滤波算法能够适应的宽带压制式干扰个数(即空域自由度)受天线阵元个数限制,例如四阵元卫星接收机最多抗三个宽带干扰,七阵元卫星接收机最多抗六个宽带干扰。一旦空间分布的干扰个数超过空域自由度,抗干扰能力将急剧下降,较弱的干扰信号即可使接收机工作失效。飞行器集群具备空域覆盖广、空间拓扑结构灵活可控、节点数量多的优势,在集群不依赖卫星导航信息的情况下,可通过针对敌方局部区域的分布式组网干扰,形成空间拓扑结构可调、功率可调、覆盖区域可调的导航干扰网络,最大程度限制敌方利用卫星信息获取高精度定位授时能力。
..导航对抗态势构建与推演技术
在干扰感知识别和分布式组网干扰技术研究的基础上,可根据飞行器集群内卫星接收机抗干扰能力、集群飞行航迹、干扰感知识别结果、敌方干扰与集群相对距离的变化、无线电信号在自由空间传播损耗等信息,动态评估并预测飞行器集群内卫星接收机对敌方干扰的适应性。根据集群分布式组网干扰方案,可预测评估分布式干扰覆盖区域及干扰效果。进而构建导航攻防对抗态势,实时动态推演态势变化,并将相关信息在集群内共享,为飞行器集群多源导航融合策略、飞行航迹规划、干扰源打击等作战任务在线优化提供重要支撑,提升飞行器集群导航攻防对抗水平。
2 研究进展
2.1 集群协同定位技术
..集群自组织定位技术
美军联合战术信息分发系统(JTIDS)是当前技术特征典型、应用广泛的一种集通信、导航和识别功能为一体的分布式无中心系统,具有大容量、保密、抗干扰、时分多址等特点。该系统通过集群之间的精密测距、信息融合计算,构建作战区域内所有友方、未知方和敌方目标之间精确相对位置和航迹,并采用广播方式,将来自飞机、地面位置、舰艇、单兵的信息在一个网络上进行融合和分发。JTIDS通过信息同步与网同步两种方式,使系统内所有成员时钟均与指定成员时间基准进行精确同步,形成统一的系统时,以保障时分、跳频、相对导航等功能正常运作。系统中各节点通过有源往返校时(RTT)技术或无源校时技术,与承担网络时间基准的时间控制者同步,系统时钟频率稳定度可达1×10~1×10。
JTIDS相对导航技术架构如图7所示,其导航解算包括基于地理坐标系的绝对定位解算和基于平面相对坐标系的相对定位解算两种,当网络中有两个或两个以上节点准确知道自己地理位置时,便可通过坐标转换建立相对坐标与地理坐标的关联。JTIDS相对导航解算时,首先指定某个节点作为相对定位基准,其它节点均与该基准进行比较。系统设计了严格的源选择逻辑,各节点选择比自己时间精度、位置精度高、相对几何关系好的源节点作为基准进行相对定位解算,以提高定位精度。同时,设计了卡尔曼滤波器,将惯性测量结果与相对定位测量值进行融合,实现全局最优估计,提升系统综合导航性能。

图7 JTIDS相对导航技术架构示意图Fig.7 Schematic diagram of JTIDS relative navigation technology architecture
在JTIDS相对导航技术架构基础上,秦红磊等在原有TOA观测量的基础上增加DOA观测量,采用UKF非线性滤波算法,进一步提高了无地面基准机群编队飞行JTIDS/INS组合导航精度。
部分学者从图论和优化的角度对协同定位进行了研究,Roumeliotis等将整个协同系统的状态估计问题拆分到每个节点,每个节点解算自身运动状态并观测其他节点的运动数据,并完成局部优化。但没有考虑不同平台之间的相关性问题,可能会引起过优估计。
在基于视觉的集群协同方面,Hardy等使用双目摄像头,以分层统计算法为索引,采用非线性卡尔曼滤波实现对无人机集群相对位置姿态的估计。Leishman等提出了一种将乘法扩展卡尔曼滤波器(MEKF)与视觉同步定位与建图(SLAM)相结合的方法,使用全局一致地图设计,模型更具灵活性。Wang等提出了一种基于惯性测量单元输出和单目相机纯方位观测的小型无人机分层SLAM系统,通过EKF将视觉测量与惯性输出融合,进行姿态和速度估计,能为GPS拒止环境下的小型无人机提供可靠、稳定的定位。高嘉瑜等结合高斯亚像素拟合原理及特征描述符简化方法,采用渐近一致性算法剔除错误匹配点,大大提高了基于图像匹配的无人机集群视觉导航技术精度。宋亮等利用双目相机观测目标表面的特征点进行相对导航,推导了一般的耦合模型描述姿态运动对位置运动的影响。胡启阳等提出一种基于双目视觉的相对导航与惯性参数辨识方法。利用目标表面的特征点建立几何坐标系,分别设计姿态测量和相对导航滤波器,实现目标姿态、角速度、轨道,质心位置与惯量比的高精度估计。
在飞行器集群协同导航算法方面,穆华等从估计精度、通信复杂度、计算复杂度和工作负载均衡性等方面,建立一套分散式算法的性能评价指标,提出一种分散式增广信息滤波协同导航算法和高斯动态贝叶斯网络推理算法,以及协同导航分散式联合树算法框架,为无中心结构集群协同导航算法设计提供重要支撑。郭少彬等提出了基于UWB的多节点协同定位技术,通过最小二乘残差剔除测距误差大的数据,保证了动态节点的相对定位精度。Xu等提出了一种基于UWB、视觉、IMU(惯性传感器)等传感器的分布式相对状态估计算法,实现了在室内环境中不依赖外部设备的去中心化无人机集群密集编队协同定位。陈麒杰等采用改进的人工势场算法,提出了一种新的集群路径规划方法。该方法能够有效避免无人机陷入局部最小值,并增强了无人机机群的控制和避障能力。白瑞光等将伪谱法应用于无人机集群控制,引入了集结区约束,建立了多无人机(UAV)协同规划的最优集群飞行模型。高杨等提出基于态势感知一致性的无人机集群分布式协同方法,并建立了协同性能量化分析模型。Li等提出一种基于后验线性化信念传播的群无人机协同定位算法,并将线性化后的测量模型应用于基于信念传播的协同定位算法框架中,有效提高了适应复杂飞行环境的协同定位精度。Zhang等对GPS拒止环境下的无人机集群定位问题进行了研究,通过结合局部坐标系中的轨迹和相互间的方位测量,实现在二维空间中的定位。
在与惯性信息的融合方面,刘俊成等提出一种利用几何图形平移旋转来估计机群各飞机惯导系统定位误差的方法,仿真表明当5架飞机协同定位时,机群惯导位置精度将提高2倍左右,有效延缓惯导位置误差的发散速度。杜君南等构建了集群飞行器协同导航模型,利用飞行器相互之间的距离信息进行集群协同信息融合,有效提高了集群中较低精度导航设备飞行器的导航性能。刘晓洋等提出一种基于联邦滤波的协同定位算法,能够有效抑制长机故障后机群编队定位误差迅速发散的情况。郝菁等将数据链测距与惯性测量得到的无人机速度矢量信息结合,设计最小二乘法对相对位置进行估计,并将惯导相对定位精度提升3倍左右;提出秩亏网平差算法对无人机间最小二乘相对定位误差进行校正,将最小二乘相对定位精度提高2倍。
针对多机协同进行空中加油、引导着陆等问题, Ding等设计了一种基于视觉的空中加油机与无人机的相对姿态估计方法,该方法结合定位参数初始化与正交迭代法估计旋转矩阵与转换向量的最优解,并讨论了该方法中特征点数量与配置对估计结果精度的影响。黎明杰等通过光流、超声波辅助测量水平位置和高度,结合初始位置对无人机状态进行估计,实现无人机集群定位避障功能。刘爱超等为解决基于无人机视觉检测对接时椭圆检测算法存在边缘描述误差太大的问题,提出了一种结合椭圆检测与边缘检测的算法,实现近距的精准导航。周清等基于双目视觉,提出了一种实用的无人机自主空中加油导航方案,并提出了一种利用深度学习进行检测跟踪配合几何约束进行位姿计算方法。Shao等设计了一种新型的USV-UAV协同平台,提出了一种多超声联合动态定位算法与分层着陆引导点生成算法,实现无人机着陆作业和运输的有效安全制导,解决了多平台耦合系统的定位问题。吴伟仁等提出了一种惯导、测距和测速相结合的安全软着陆导航方法,提高了无人降落引导系统在高度和速度上的精度。徐超等提出一种采用双目视觉测量的无人飞行器着陆相对导航方法,利用陆标的双目测量信息建立相对导航坐标系并获得陆标在相对导航坐标系中的位置。
从国内外研究进度来看,作为支撑协同作战的基础技术,以美国为代表的西方国家较早开始集群协同定位导航技术研究,在协同定位理论、定位算法、鲁棒性以及应用等方面积累了丰富研究成果,整体上处于领先地位。我国在飞行器集群协同定位技术方面起步较晚,国内部分高校及科研机构在飞行器集群协同定位理论与算法方面取得一定的研究成果,但整体上仍处于追赶阶段。
..跨域引导定位技术
美国自21世纪初开始大力推动向网络中心战转型,由位于前线的战斗机、无人机、特种部队等作战单元现场侦察确定目标信息,并将实时测量更新目标信息传递给精打武器,实现多平台、多军种协同作战。
为提升班组作战能力,DARPA成立“班组X试验(Squad X experimentation)”项目,利用无人机、无人车,在距离步兵班1000 m以外自主探测和感知危险;在卫星拒止条件下,步兵班人员通过有人/无人之间的协同测量可确认自身和班组成员位置,定位误差不大于6 m;利用分布式非视距瞄准与制导弹药等手段,对1000 m外目标进行精确打击;袭扰敌方的控制与通信链。2018年11月30日,该项目第一次成功演示验证了班组单元的态势感知能力。
2019年6月20日,美空军联合DARPA和多家企业启动“金帐汗国”(Golden Horde)项目,旨在实现“小直径炸弹”、AGM-158“联合空地防区外导弹”、ADM-160“微型空射诱饵”等现有机载武器自主发射脱离、自主协同探测与作战打击,并向载机和其他载荷提供信息反馈或更详尽的情报监侦数据。战斗力生成的核心由主战装备转变为复杂系统的协同,使打击弹药普遍具备协同打击能力,这将使得美军空地打击弹药实现第四次发展飞跃。
为提高近距空中支援效率,DARPA启动了持久近距空中支援(Persistent close air support,PCAS)项目,旨在将从发出请求到实施攻击的时间跨度从当前的30~60 min缩短到6 min。卫星拒止环境下作战是该项目的主要研究内容之一。特战队员使用光学瞄准设备、小无人机等单兵便携设备获取目标坐标信息,通过数据链实现与附近有人/无人机的实时通信和态势共享,通过光学瞄准设备引导战机对高威胁目标精确打击。资料显示,在“安卓战术攻击套件”支持下,控制员最少点击3次平板电脑即可指挥一次空地协同打击。
在有人/无人协同跨域引导定位方面,Sivaneri等研究了在GNSS拒止环境下无人机与无人地面车辆(UGV)的协同导航问题,通过点对点无线电测距来降低无人机定位的不确定性。重点研究了UGV的最优运动设计,改进无人机定位几何分布提供最佳的定位辅助。Frietsch等研究了基于视觉系统的小型无人机协同导航,通过无人车辆小组对无人机机载图像的检测、跟踪与定位,并在嵌入式计算平台上实现。韩勇强等提出了一种基于无人机节点的单兵导航系统协同快速初始化方法,仅需1个辅助节点即可实现较好的单兵定位系统位置和航向初始化。李樾等以凸优化理论为基础,提出一种有人/无人机协同系统的航迹规划方法,有效提高有人/无人机混合系统的飞行安全性及航迹变换的灵活性。翟建勇等提出一种高精度区域导航系统设想,通过卫星导航信号可视性良好的主控站为系统中若干基准站提供高精度时间基准源,在导航卫星部分不可用时,实现为用户提供区域高精度定位导航服务的能力,并围绕系统优化布局规划、多重覆盖及远近效应、高精度时间同步与维持、高精度测量与定位等开展一系列技术研究。在信号体制方面,蔚保国、吕红丽、邓中亮等先后提出数字多波束多星测控技术体制、多址导航信号体制、TC-OFDM通信导航融合信号体制,为高精度测距及通导融合提供重要支撑。
2.2 集群协同对抗技术
在干扰感知与识别方面,美军的精确定位与打击系统(PLSS)利用多架侦察机组成的集群编队对敌方辐射源进行远距离探测,把探测信息传送给地面站统一融合处理。系统主动工作时能够通过机载设备探测到纵深 55 km内的目标辐射源;被动工作时可利用机载无源探测设备侦收敌方目标辐射源信息。郭继峰等针对异构无人系统的规模、异构性强弱,对异构无人系统进行了分类,引入了异构无人系统协同班组的概念以及导航需求,对面临的挑战与思路进行了分析。Li等针对欺骗干扰环境下多无人机系统的位置安全问题,建立了一种新的三层信任模型,能在欺骗和干扰环境下提供可靠的定位方法。Huang等研究了基于多无人机协同控制的无人机集群的损耗检测和自动更换方案,提出了通过检测心跳时间的无人机损耗检测方法与一种基于竞争协议的无人机自动替换方案,增强了无人机编队的抗毁性与抗干扰能力。崔建华等提出了一种基于阵列天线的欺骗式干扰检测和抵消方法,该方法将阵列天线接收的载波相位双差测量值作为干扰检测依据,并通过最小二乘法求解干扰方向矢量,进而构建正交矩阵消除干扰。段朋成等从链路接收信号建模和信息处理时认证相结合的角度,提出一种无人机抗欺骗干扰方案。Xu等设计了一种复杂对抗环境下多无人机协同导航的优化方法,结合威胁准则和油耗准则,在时间和空间约束下,建立了多约束目标优化模型。吕东亮等提出基于模式识别技术的干扰监测与定位方法,通过对监测范围输出载噪比的特征进行学习,实现对干扰信号的检测与定位。
在集群协同干扰方面,DARPA推进的拒止环境协同作战(CODE)项目,通过传感、打击、通信和导航等方面的自主化协同,增强无人机或尖端导弹在拒止环境的作战能力。集群内具有高精度时钟的多个平台利用相干射频效应,显著扩大探测、通信和电子攻击范围,同时增强通信信号抗干扰能力。Xing等针对无人机群动态导航对抗问题,提出一种自组织攻防对抗决策算法,采用分布式体系结构来实现实时性。冉惟之等提出在无人机集群中搭载低功耗电子干扰设备,依据无中心式协同控制模型和对局部态势的观测,实现集群自适应协同任务分配、航路规划和抵近式干扰,形成对三维空间中多个随机方位高速入侵目标的持续拦截能力。黄郡等提出小型干扰机区域分簇组网结构和基于多目标整数规划的协同干扰任务分配模型,有效支撑目标区域干扰覆盖和最小能量消耗。陈琳等提出基于改进人工鱼群算法的干扰资源分配方法,支撑基于频段覆盖率的协同空战干扰资源分配。
3 技术难点
通过对飞行器集群协同定位及导航对抗技术的梳理与分析可知,围绕该领域已经形成广泛的研究基础,但仍存在一定不足,主要面临以下难点:
1)快变拓扑条件下节点可定位性评估与优化难题。多域、异构、大规模、动态集群节点的可定位性评估与静态或缓变区域导航系统存在本质差异,快变拓扑条件下节点可定位性评估、分布式组网性能边界、集群自适应优化部署等方面需要开展进一步的理论研究。
2)异构平台跨域引导定位误差传播机理。跨域引导定位场景,引导媒介对飞行器集群、目标分别测量,建立飞行器集群与目标之间的相对位置关系,存在两层甚至更多层定位网络,多层定位网络之间定位误差传播机理与特性,是跨域引导定位面临的新问题。
3)集群分布式高精度测距与计算难题。高精度测距是实现高精度定位的基础,随着节点数量增多,如何在计算量、通信资源占用、计算时间、测量精度等众多因素之间兼顾和均衡是一个难题。
4)面向大规模节点的自适应、无中心化自组网协议与快速路由设计难题。未来飞行器集群规模不断增大、集群动态不断提高,将面临超大规模集群自适应敏捷组网,以及大规模集群内的信息流路由与资源协调难题。
5)飞行器集群导航攻击效果评估与建模难题。如何统筹考虑干扰空间分布、最小有效功率、干扰覆盖空域等因素,实现导航攻防对抗效果量化评估,是未来飞行器集群智能灵活分布式干扰组网面临的难题。
4 发展趋势
在体系化、智能化应用需求的大力牵引下,飞行器集群协同定位与导航对抗技术呈现蓬勃发展态势。展望未来,下述技术预计将获得快速发展和突破:
1)分布式协同导航技术快速发展。分布式协同导航算法兼顾定位性能与计算量,将获得快速发展,显著提升飞行器集群高鲁棒、高精度协同定位导航性能。
2)通信、导航深度耦合。通信、导航功能在信号、信息层面深度耦合,终端产品高度集成,兼顾定位与通信需求,有效解决集群内部频谱资源冲突、高精度测量难题。
3)多源信息深度融合。惯性导航、数据链相对测距、卫星导航、视觉、干扰感知等多源单体感知和测量信息,在群体层面深度融合、智能容错,集群导航精度与可靠性均获得大幅提升。
4)引导定位技术进一步发展。引导定位突破单一飞行器目标感知能力有限的约束,探测平台与打击平台跨域协同,提升复杂对抗条件下战场信息的综合感知和快速响应能力。
5)导航对抗实现攻防兼备。在飞行器集群自主时空基准支撑下,集群协同干扰感知、分布式导航攻击、导航态势构建与动态推演等技术获得快速发展,实现由传统被动防御向攻防兼备的跨越。
6)融入体系、走向智能。导航将与制导控制、决策等环节深度融合,融入体系,共同支撑未来智能化战争需要。
5 结束语
对抗条件下可靠时空信息获取是赢得战争的先决条件。本文从攻防兼备集群协同定位与导航对抗技术架构入手,深入剖析了技术内涵,梳理总结了国内外技术研究进展,提炼分析了技术难点,并对未来技术发展趋势进行了展望,可为飞行器集群协作式时空基准构建提供参考与借鉴。