“企鹅”号大型圆筒型FPSO出坞及靠泊作业分析
2022-03-31徐信江孔祥伟
徐信江 孔祥伟

摘要:FPSO具有吨位大、形状多样和无动力等特征,其出坞和靠泊作业是行业难点。“企鹅”为圆筒型大型FPSO,具有各项同性,不具有航向稳定性,易出现涡激振动,产生周期性振荡的横向力等现象给操纵带来巨大挑战。本文从引航员实操视角给出 “企鹅”由中海油船坞出坞及靠泊全过程的作业方法及相关辅助手段,制定了一套完整的作业流程和体系,总结了作业过程中的成功经验,分析了不足之处。
关键词:圆筒型FPSO;风流载荷;操纵控制;拖船
0 引 言
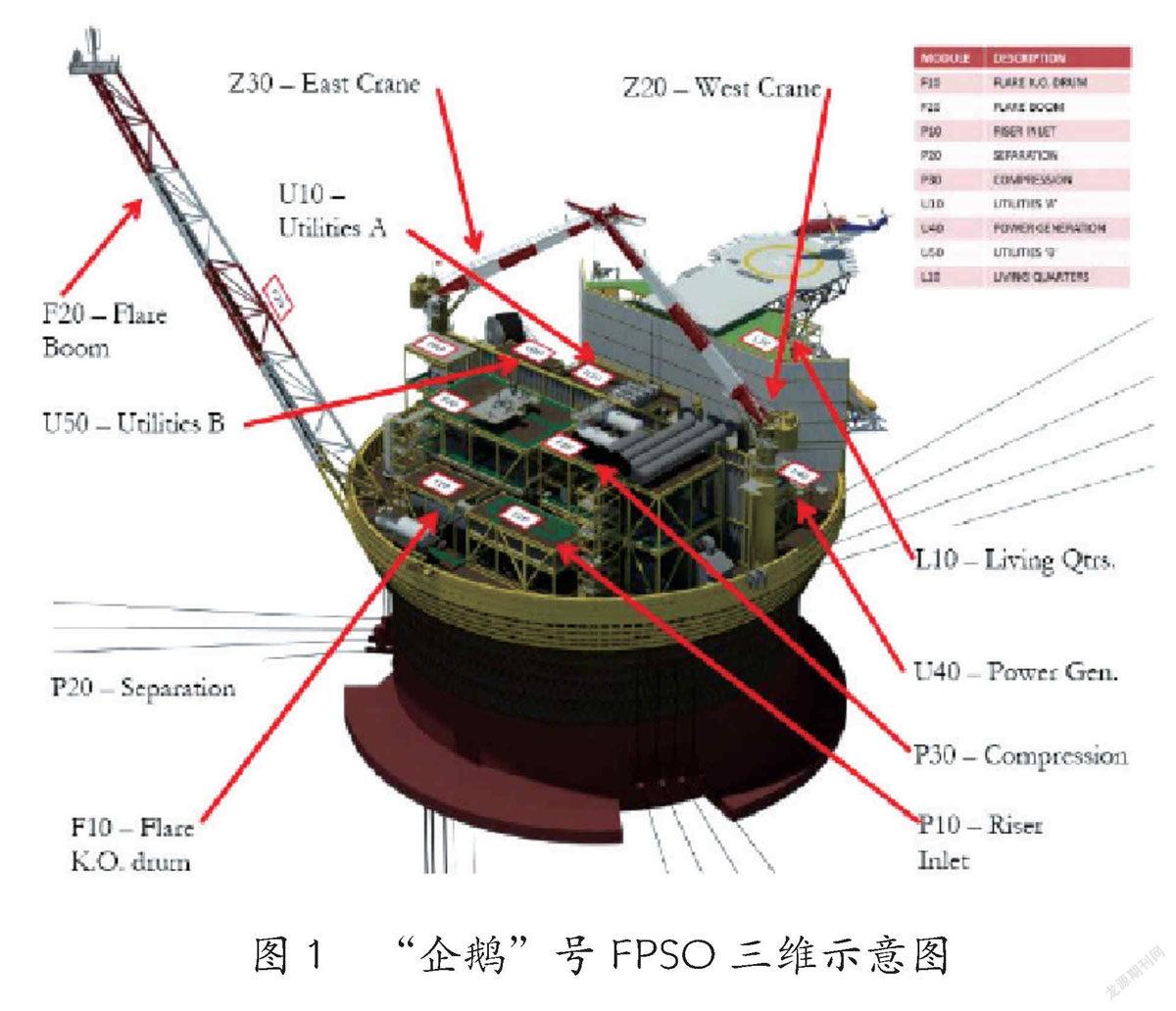
随着陆地油气资源过度开发不断枯竭,人类把油气资源开发的目光瞄准海洋,深海蕴含着全球40%的油气储量。海上油气加工厂(FPSO)是海洋油气开发的有效途径之一,FPSO是集生产、储油、卸油为一体的海上浮式生产储卸油装置。“企鹅”号(见图1)是国内自主设计与建造的最大的圆筒型FPSO,其储油能力达400 000桶。“企鹅”的出坞、靠泊、倾斜试验及后续浮装工作均需多方协同制定严格的操作规程。本文以2021年2月10日FPSO“企鹅”(见图2)自青岛海西湾中海油海工码头出坞靠泊作业为典型实例。“企鹅”技术参数:最大直径(不含碰垫):87.5 m,船体直径:70 m,出坞吃水(含底部锌块0.5 m )7.7 m,排水量>30 000 t,船体周围有防腐蚀的锌块,拖船只可拖不能顶。
“企鹅”是典型的圆筒型FPSO,且中间细,两端粗,类似“哑铃”,且上下不完全对称,通过查阅资料和实操总结,圆筒型FPSO其操纵特点如下:
(1) 由于其圆筒型结构,在水面上及水面下均拥有对称性,具有各项同性,不具有航向稳定性,对于风浪流的方向不敏感;
(2) 相同装载情况下,水线面积更大,具有更强的抗倾覆能力,抗载荷能力强,同天气条件下,海上作业状态更加稳定;
(3)出坞时对坞门处流体具有阻塞效应,流速增加,出坞过程中出现易变阻力现象,受力不均匀情况下,更容易旋转,而且由于其圆形结构,判断偏转及运动方向时难度更大;
(4) 相比船型结构,其运动更具有不确定性,受力时更易于偏荡,且易伴随旋转,自我恢复能力差;
(5)大型圆柱航行中易出现涡激振动现象,产生周期性振荡的横向力,对切向力反应敏感,且拖船等辅助操作时由于其弧形表面影响,对施力方向判断参考性较差,相比其他类型操作误差加大。
由于圓筒型FPSO的自身特征对本次出坞靠泊作业带来较大难度,国内目前在该类型FPSO出坞靠泊作业缺乏相关案例,青岛引航员在考虑风流载荷与多艘拖船共同作用下顺利完成了“企鹅”号出坞及靠泊作业。过程中所采用的操作思路、技巧及注意事项等本文所研究成果供同行参考。
1 作业环境及圆筒型稳性计算分析
1.1 船坞及操纵水域特点
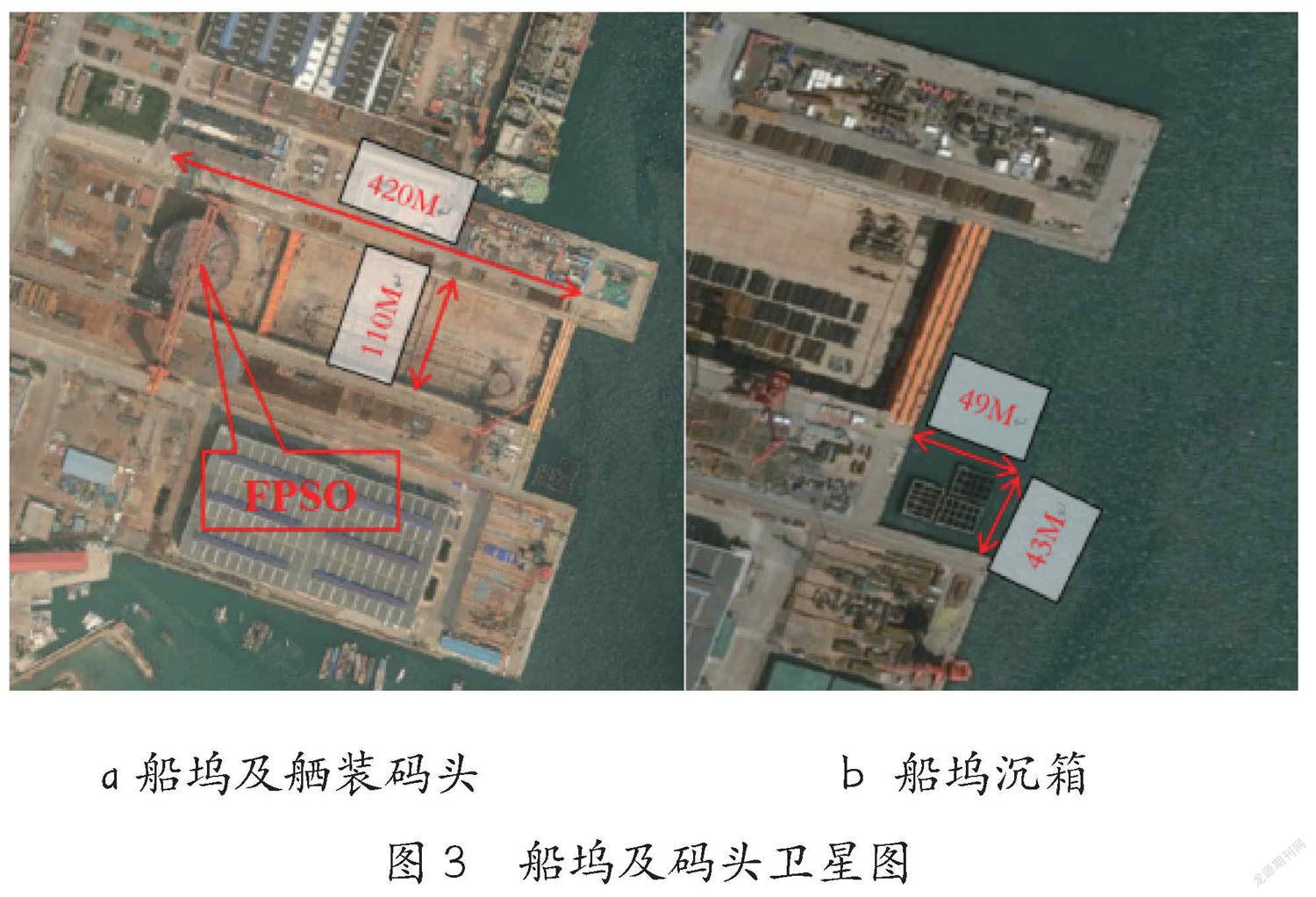
中海油船坞,如图3所示,长420 m,宽110 m,深13.9 m,走向为288.5°,两侧有防撞条,但对“企鹅”防护作用很小,且口门处有3个废弃沉箱,难以清理,其大小为49×43 m,且完全裸露,无任何防护,为操作中较大的一个风险点。坞门外可用水域直径150 m,趁潮可用水域最大250 m,流速较小,坞内浪涌影响可以忽略,受风影响较大,操作窗口期应主要考虑天气因素。碍航浮筒均已移除,航道仅剩一个浮筒,与码头间距最近处约270 m,靠泊码头为中海油码头(图3a右上角停船处),靠泊后距船坞方向码头角约80 m,对内侧拖船操作有一定影响。
1.2 圆筒型 FPSO 的稳性分析
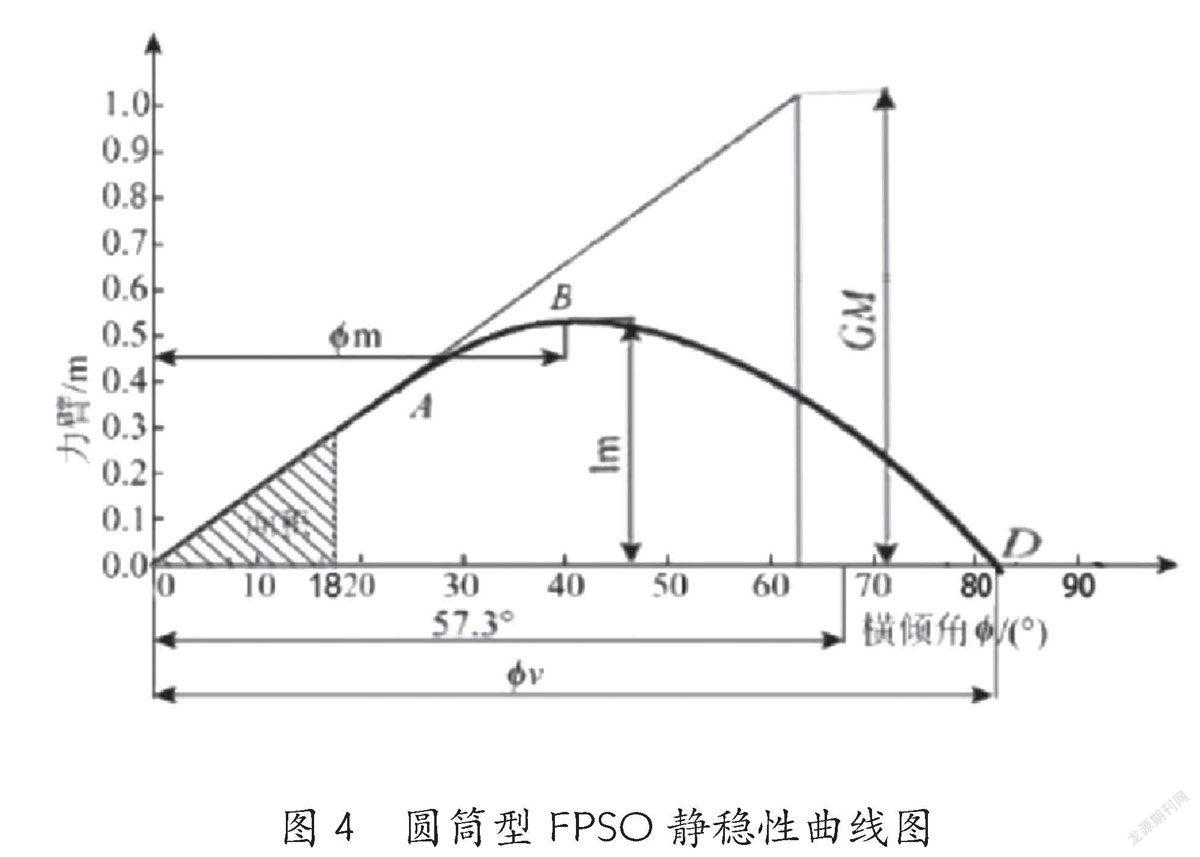
常规 FPSO 的外形类似于船形,或者直接由大型油轮改造加装而成,而类似于“企鹅”的FPSO,其最大的特点是其主体为圆筒形状,这种特殊的外形直接决定了该 FPSO 作业时稳性特点。在实际操作中,FPSO 本身具有的稳性是应该考虑和分析的因素之一,通常情况下,评价平台稳性需要通过静态稳性曲线来判断(如图 4所示,GM 初稳性高度;横轴为横倾角;纵轴为扶正力臂;B为静稳性曲线)。
理论上讲,初稳性高 GM 的计算公式为 :
GM=KB+BM-KG (1)
式中: KB 为浮心高度,BM 为初稳心半径,KG为重心高度。
BM = I T / Δ (2)
式中:IT 为水线面对中心轴的横向惯性矩,Δ为水线以下的排水体积
假设标准圆筒浮体直径为 D,圆形水线面的横向惯性矩为
F圆 =( πD4 ) /64 (3)
由以上公式可知,圆筒型 FPSO 可以通过增大其水线面面积来提高稳性性能,而且近似规则的圆筒型 FPSO本身具有更大的初稳性高度 GM。在实际情况下,BG值基本确定,BR的值由排水体积的形状而决定,当倾斜的角度在可控范围内越大,BR 的值随之变大,GZ 的值也随之变大,则平台稳性越好。通过计算及查阅资料可知,在相同的条件下,圆筒型 FPSO 要比船型 FPSO的稳性更优秀。
2 操纵模拟器试验
2.1 作业前对企鹅的基本认识
(1)移动过程中最重要的是控制船体的旋转;
(2)船体上层建筑的不均匀分布,风载荷不对称,易造成其旋转;
(3)在用拖船抑制旋转的过程中,往往会发生船体横移;
(4)由于船体运动惯性,克服旋转和横移需要较长的过程。
鉴于以上认识,在移动船体的过程中,应该允许其有一定的旋转和横移,但应严格控制其旋转和横移幅度。
2.2 模拟器实操
由于其船型的特殊性和障碍物(废弃沉箱)的存在,为测试作业风险性和可控性,对该流程利用模拟器进行了模拟试验,结果如下:
通过仿真模拟试验,风力 4 级条件下,由于 FPSO“企鹅”受风面积大,船坞尺度有限,拖船放缆拖位状态下在坞内操纵受限,船位控制困难,出坞风险较高;
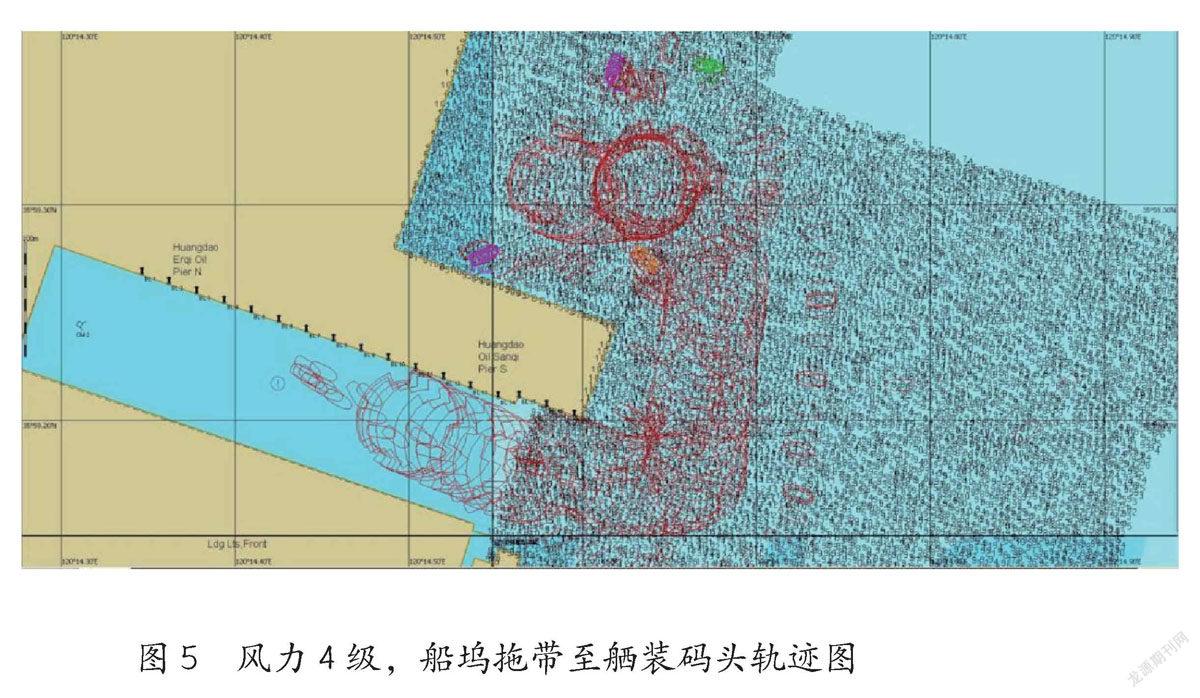
坞内移动过程中,由于“企鹅”圆筒型结构,在拖船及缆绳作用下,在受力不均时,FPSO“企鹅”易产生明显偏转,可能导致其旋转角速率过大(如图 5 所示), 需要不停地调整坞边缆绳的受力和前后拖船拖力方向和大小,才能维持“企鹅” 的稳定姿态,及时的动态判断和姿态调整是重点和难点。
为了保证拖带出坞安全,拖带需限制作业条件及保障措施。通过模拟器实操试验得出结论如下:
(1)拖带作业过程中应严格控制风力等级,风力不超过 3 级进行出坞作业, 当风力超过限制条件时应禁止作业;
(2)作业期间此季节内该工程水域多以 NW 风和 N 风为主,在吹开风的作用下,“企鹅”向南岸漂移明显,为保障安全,北侧需至少保留 3 根坞边缆绳;
(3)在“企鹅”的南北两侧底部外缘(87.5 m最宽处)处加装一定数量的防撞碰垫;
(4)舾装码头边缆机上缆绳长度至少 220 m(有效出缆长度约为150 m)。
3 圆筒型FPSO出坞与靠泊作业
3.1 出坞作业
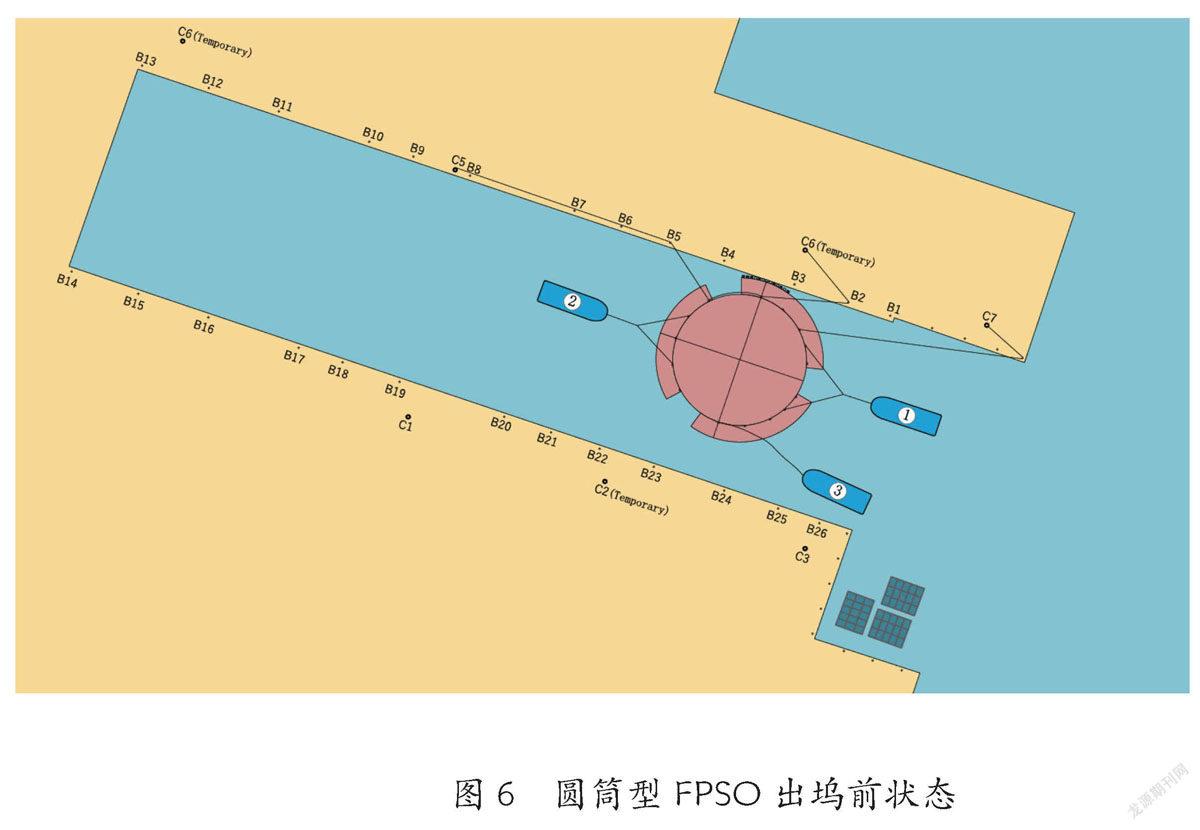
经多次交涉和探讨,圆筒型FPSO出坞前状态如图6所示。
北侧留三根缆绳,分别通过绞盘C5、C6、C7控制,其用途有两个:①出坞前固定船位;②出坞过程中作为“安全绳”,随船体移动随时调整,协助拖船共同控制“企鹅”,抑制偏转及防止向南横移过大而触碰南岸壁或废弃沉箱。1号和2号拖船带“Y”型缆,提供纵向力,3号拖船辅助控制船体旋转。
根据计算,13:00,潮高满足通过坞门槛富余水深的要求,当时风力3级,风向东稍偏北,所有人员就位,开始出坞作业。C5、C6和C7缆绳缓慢放松,1号和2号拖船向南岸偏转10°以最慢车拖带(经查证1号和2号拖船最慢车拖力分别约为32 t和22 t),“企鹅”与北岸壁离开5~10 m距离后,拖船回正,1号拖船拖力保持略大于2号(两拖船同时施力,可有效抑制偏转),缓慢向坞门方向移动,3号拖船和北岸侧缆绳共同作用控制其旋转。移动初始阶段,C5和C7缆绳起主控作用,当“企鹅”向外移动大约一个直径距离时,C5缆绳过长,角度也接近平行码头,失去作用时将其解掉,由 C6接替C5,和C7共同来协助控制姿态(受码头设施限制,缆绳可受力约10~15 t,可控范围内主要依靠拖船)。
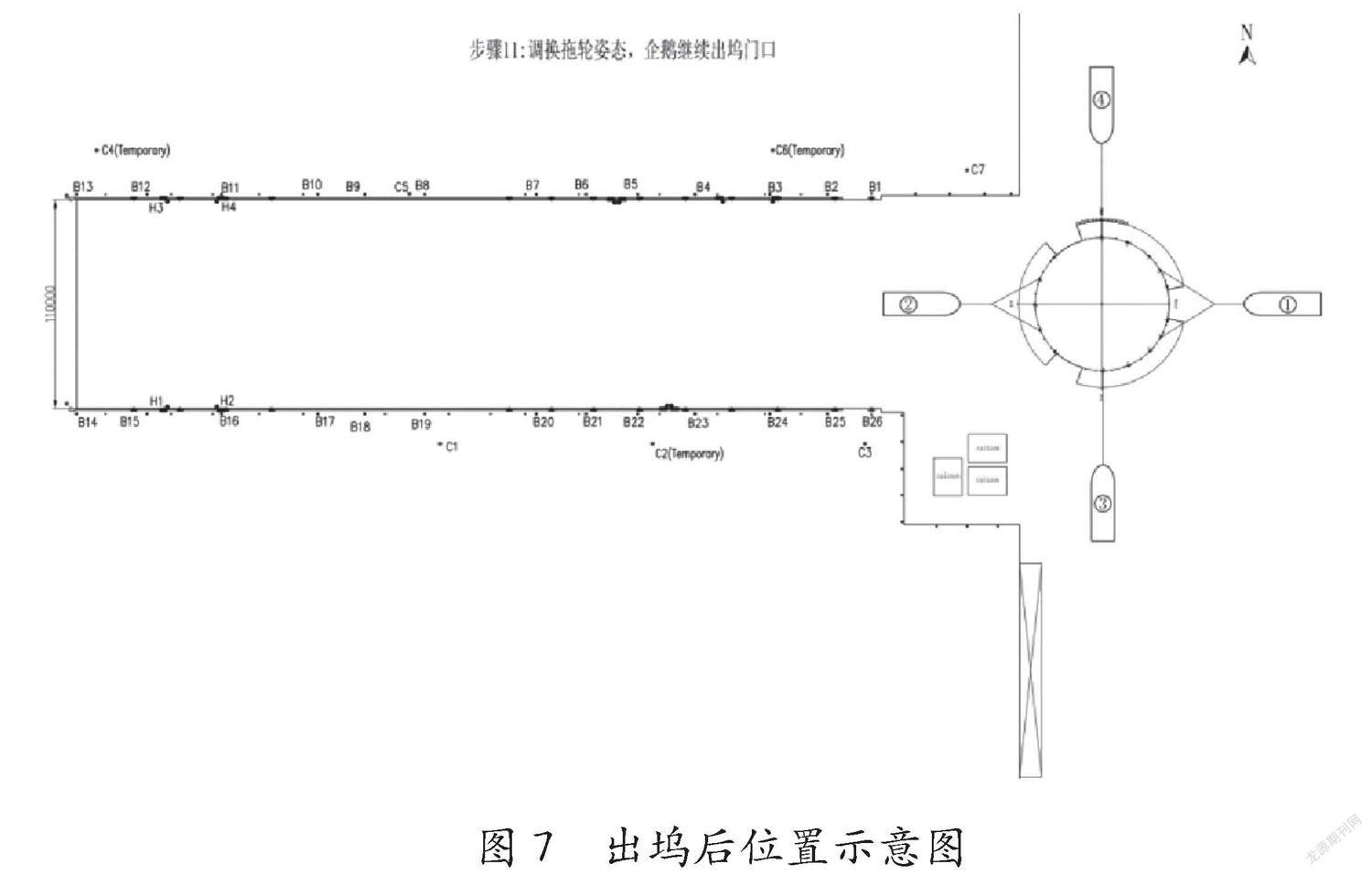
出坞的整个过程中,移动速度不超过0.8 kn, 1号和2号拖船既调整拉力大小控制纵移速度,同时兼顾调整拖缆角度控制偏转,当“企鹅”中心与码头角平齐时,将C6、C7缆绳全部解掉。13:30,到达如图7位置,带好4号拖船,至此出坞成功,进入下一步操作。
3.2 靠泊作业
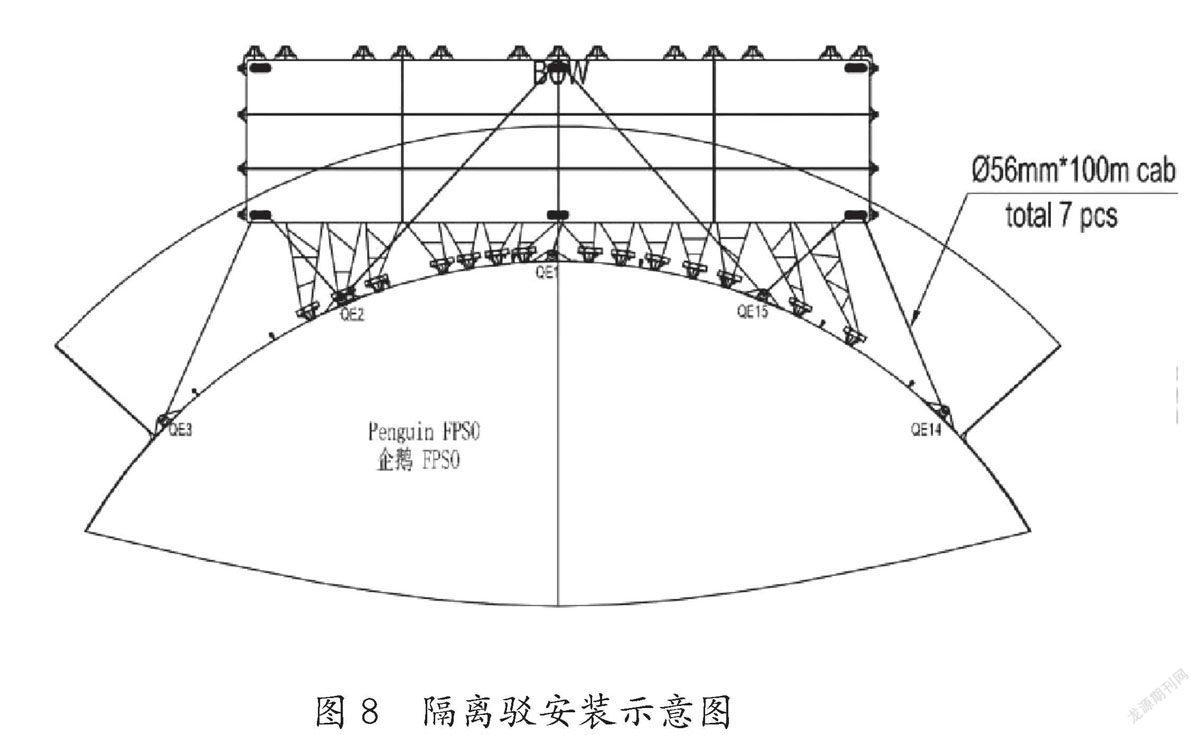
(1)船坞离清后,换4号拖船主拖,1号、2号及3号拖船控制偏转及偏荡,将其拖带到舾装码头外档150 m处,解掉2号拖船,在其位置处加装隔离驳(如图8),加装过程中必须保持“企鹅”状态稳定(无明显横移及偏转),隔离驳共需8根缆绳固定,二者必须保持长时间相对静止,隔离驳由另一拖船傍拖摆好位置,由隔离驳上工人固定缆绳,耗时约40 min。
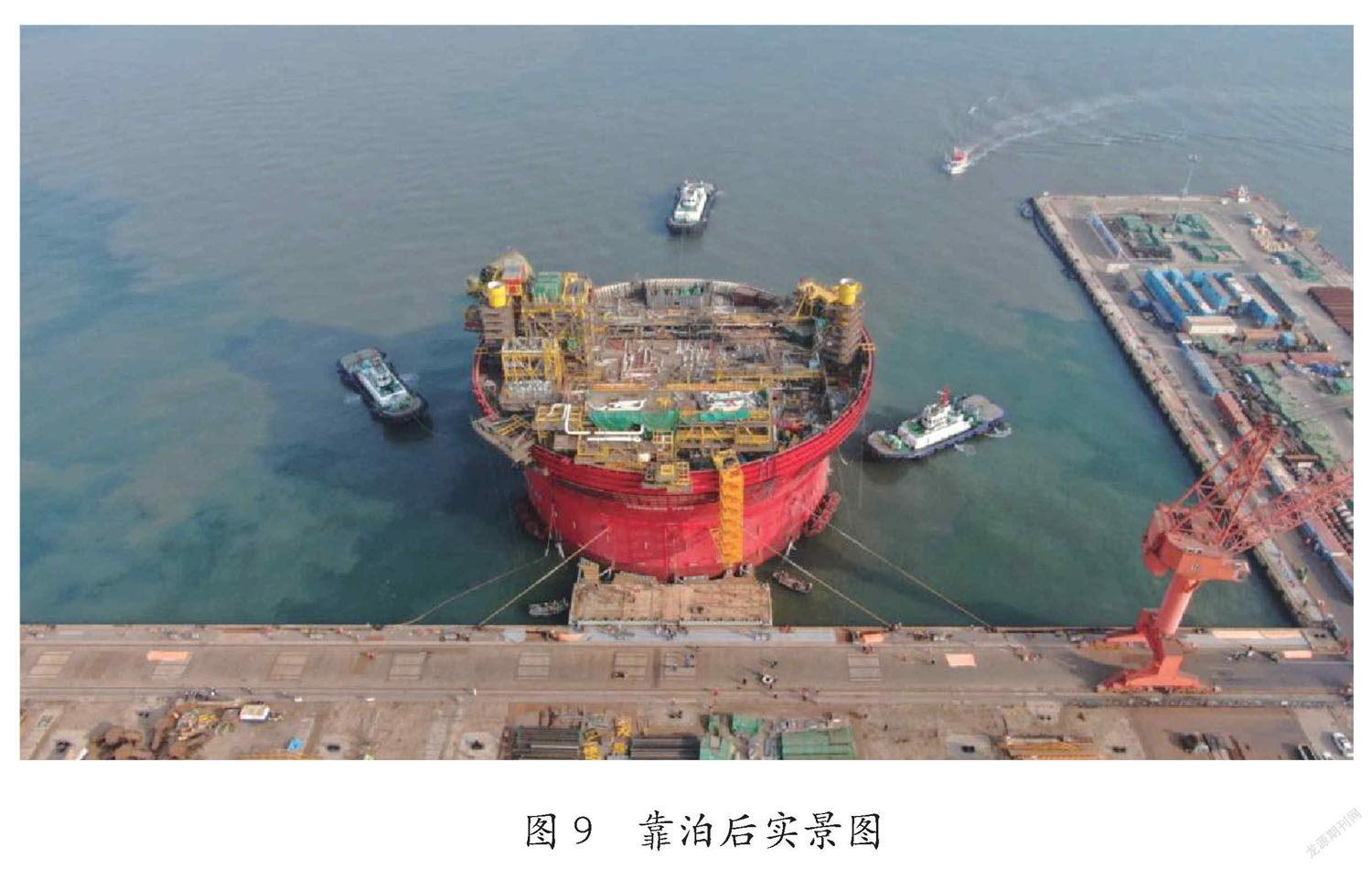
(2)由3号和4号拖船调整拖力方向至偏向码头侧30°左右, 1号拖船协助控制移动速度和抑制偏转,缓慢靠向中海油码头,距码头60~80 m处,由小型带缆船依次带好内侧四根缆绳,通过岸侧四台缆车控制绞缆,协助拖船将“企鹅”缓缓绞靠码头(见图9)。
3.3 作业小结
前期准备充分,出坞及靠泊完成比较顺利,但仍需认真总结,细节处仍有待改进,本次实操作业小结如下:
(1)由于设备原因,岸侧的缆绳没有充分發挥作用,缆绳承载不够,收放缆速度需进一步提高;
(2)拖船力量足够控制圆筒型FPSO “企鹅”所受风流载荷,1号、2号拖船大部分时间只需最慢车或慢车,调整拖力方向来控制圆筒型FPSO所受的剪切力是重点;
(3)操作中重点控制圆筒型FPSO的横移和偏转,作业中没有出现过大的横移和过快的偏转;
(4)系解缆绳的小型船操作娴熟,比预期顺利,整个过程比预定操作时间缩短了1 h左右。靠泊时风偏吹向码头,弥补了缆车功率的不足(拖船靠近码头时操作空间所限无法提供向码头方向的动力)。
3.4 操作技巧及注意事项
(1)提前预定准确天气预报
得益于天气预报提供的精准信息,本次作业选定在2月10日,天气条件为能见度两海里以上,风力3级,风向东略偏北,海面平静,所需潮高时间段均为白天,为该季节难得的作业窗口期。
(2)现场查看
制定引航方案前,需組织相关人员多次查看现场,查看的重点为被引船或平台的形状、构造、缆桩设置、导缆孔位置、安全负荷、作业及周边水域状况等。船舶或平台的设计者或工程人员,不一定了解引航员的操纵方法和意图,有些设置或装备就可能不能满足引航作业要求,令其整改,并落实到人。
(3)引航员站位选择
有些船舶特别是近些年出现较多的海上作业平台,上层建筑或设备较多,站在某一个点上,不能够看到船舶或平台的全貌,对船舶或平台运动态势的判断势必会受到影响,这种情况下,可以选择多个点,走动观察,或者配备多名引航员,分开站位,将观测信息提供给主引航员,供主引参考采取决策。
(4)选择适当的作业时机
近年来,无动力平台的外形趋于多样化,多数无动力平台都不装备助航仪器,这样就对引航员的观察和判断提出很高的要求,随着船舶或平台大型、异形化,引航操纵的难度和风险陡增,所以,要根据作业难度选择作业时机,包括潮汐、风力、能见度情况等要限制在合理的范围之内。
(5) 拖船的合理配置
无动力船舶或平台任一运动要素的改变都需要靠外力来完成,所以拖船的合理搭配就特别重要,要有足够功率的拖船,并且要安排在合理的位置上,以发挥其最大功效。安排拖船的原则为:拖船必须可以提供任何方向、足够有效的力量。很多情况下如船体结构特殊或是装载情况等,拖船只能拖不能顶,这样不仅增加了拖船的操纵难度,拖船的作用效果也大打折扣,引航员还要分配精力来照顾拖船。此类作业应选用船况好、驾驶员操作水平高的拖船,以确保作业安全。
(6)相关方的合作
引航就是一个多方相互合作的过程,对无动力船舶或平台而言,更是如此。作业前召开船前会十分必要,在前期准备和沟通的基础上,各方面对面敲定具体事项,关键细节必须要落实到人。作业中,与拖船之间的沟通,语言要简练准确清晰,对于异形船舶或平台,需提前约定船首、船尾、左右舷及指令形式,以保证对指令理解的统一性;与码头各方的联络通过现场总指挥来完成,总指挥需一直不离主引航员左右,并要求其与各作业点联络时刻保持畅通;其他引航员与主引航员之间的沟通最好选择另外一个频道进行,以保证工作频道的清爽,也防止被其他相关方误听造成不必要的麻烦。
(7)“企鹅”形状的制约
“企鹅”并非是一个规则的圆筒型,两头粗,中间细,下部完全没入水中,这对指挥员的判断有很大影响,而且底部圆盘有三个大的缺口,前期在靠近岸壁可能发生碰撞的位置预先固定了大型轮胎防撞,以备不时之需,但后期的操作还是应慎之又慎。出坞过程中,尽量让“企鹅”沿坞中心外移,避免不必要的碰撞和摩擦。后期靠泊时隔离驳接触码头,有利解决了弧形外舷靠泊的问题,只需缓慢平贴即可,与规则形状FPSO操作无异。
4 总 结
大型FPSO的操作一直是技术难度很高的一类作业,其受限因素非常多,如气象水文、港口条件、拖船操作以及包括引航员在内的多团队的协作等等,往往开弓没有回头箭,其重点是前期大量的研讨沟通以及操作细节的确定。其中,时间窗口的选择是重中之重,但是受季节、船期以及项目要求等制约,很多时候都是选择比较合适的窗口期,而不是牺牲大量时间去等待完美的窗口期,所以研讨阶段,要覆盖各种可能的条件,还要有充足的应急预案,不仅限于突发天气海况和机械故障的发生。随着这类FPSO的建造,我们会有越来越多的机会参与到类似的特种船操作中来,操作经验也会越来越多,希望每一个操作者都能认真总结,分享出来,给后期参与此类操作的同仁以参考,同时,认真的总结也是对自己的一次难得的提高机会。
参考文献
[1] 吴家鸣. FPSO的特点与现状[J]. 船舶工程,2012.
[2] 童波. 圆筒形FPSO尺度规划和运动性能研究[J]. 海洋工程,2017.
[3] 李昌伟. 无动力船舶港内拖带关键技术研究[J]. 武汉理工大学,2010.
[4] 夏国泽. 船舶流体力学[M].武汉:华中科技大学出版社,2003.
作者简介:
徐信江,本科,一级引航员,(E-mail)xuxinjiang1981@163.com,15505321146
孔祥伟,本科,高级引航员,15505321142
