基于角锥棱镜的激光干涉位移测量误差分析
2022-03-30王亮亮商正君杨海马杨美婷赵建海
王亮亮,商正君,杨海马,杨美婷,杨 静,赵建海,于 涌,3
(1.中国科学院 上海天文台,上海 200030;2.上海理工大学,上海 200093;3.中国科学院大学,北京 100049)
0 引言
激光干涉测量技术由于具有测量精度高、测量范围广和分辨率高等技术优势,在微电子、超精密加工和三坐标测量机等许多领域的精密测量中得到广泛应用[1]。
使用干涉测量技术,不仅可以对线位移、线速度、角度和直线度等物理量进行测量,还可以对电容和电感类位移传感器进行标定,具备光栅尺等传统测量方式所不具备的优势[2]。按照Michelson干涉原理建立的激光干涉位移测量系统,在测量光路反射镜的选择上存在平面镜和角锥棱镜两种方式。如美国Agilent公司的干涉仪产品主要采用平面镜反射方式,英国Renishaw公司的干涉仪则选用角锥棱镜反射方式。
使用激光干涉原理进行线性位移测量时,测量精度主要受到3个方面影响[3]:(1)环境因素的不稳定,包括测量环境的温度变化、湿度变化和气压变化引起的空气折射率变化、被测件的热膨胀,以及空气扰动和地面振动引起测量光路波动而产生的测量误差。(2)几何测量误差,包括被测件线性运动过程中姿态角度和直线度等自由度、阿贝和余弦引起的测量误差。(3)系统误差,主要指测量系统本身固有的误差,如激光频率稳定性、电子噪声以及测量部件如平面镜或角锥棱镜等光学加工误差引起的测量误差。
为实现高精度干涉线性位移测量,需对干涉测量误差的不同影响因素进行准确测量、分析以及补偿[4-5]。对于由环境因素不稳定引入的测量误差,通常使用传感器对实验环境的温度、湿度和气压进行实时测量,进而通过补偿进行消除。对于几何测量误差,则需要对各种自由度、阿贝和余弦引起的测量误差进行准确测量,确定相应的误差修正方法。当选取平面镜或角锥棱镜作为测量反射镜时,由于光线传播特性不同,二者在整体干涉光路的设计上存在差异,相应的位移测量误差形式也有区别。文献[6]对干涉位移测量的主要误差来源进行了分析和讨论,给出了总测量误差的一般估算方法。文献[7]具体分析了干涉条纹宽度以及激光光强对测量误差的影响。文献[8]介绍了干涉位移测量时未对准误差的评估以及补偿方法。本文以角锥棱镜作为干涉测量反射镜的方式为研究对象,从运动自由度、余弦误差和阿贝误差3个方面,分别推导和分析它们对线性位移测量精度的影响,并开展相应的验证实验。
1 角锥棱镜光学特性
图1所示为角锥棱镜的光学特性示意图,在角锥棱镜上分别建立∑R和∑C坐标系,角锥棱镜顶点OC为∑C坐标系原点,3个直角边分别为其坐标轴[9]。∑R坐标系的原点位于角锥底面ABC的中心,XR轴经过角锥棱镜顶点OC,YRORZR平面位于角锥棱镜底面ABC上。在∑R坐标系下,若入射光线的入射点坐标和方向矢量分别为:

图1 角锥棱镜光线传播示意图
(1)
通过∑R和∑C两个坐标系的坐标转换等步骤,可得到出射光线在∑R坐标系下出射点的坐标是:
(2)


(3)
在实际应用中,角锥棱镜进行了一定的机械封装,如图2所示。选取位于角锥底面ABC的∑R坐标系,近似分析角锥棱镜在随运动平台线性运动过程中不同运动自由度对线性位移测量的影响,其中XR坐标轴所在方向为光轴方向。

图2 角锥棱镜实物示意图
测量前的准直对光过程中,须使得入射光线尽量垂直于角锥底面ABC,且入射点位于ZR轴上。此时,入射点坐标和入射光线的方向矢量在R坐标系下的表达式分别为(空气折射率取1):
(4)
根据式(2)计算得到出射光线出射点坐标为:
(5)
可以看到,此时出射点坐标与入射点坐标是关于XR轴对称的,即出射点相对于入射点只存在一个ZR轴方向的纵向位移。
2 激光干涉测量原理
基于角锥棱镜进行干涉线性位移测量的测量原理如图3所示,干涉仪激光头出射的激光束经分光镜分成两束激光,一束光向上反射至不随平台运动的固定角锥反射镜,经过反射再次经过分光镜后反射至探测器形成参考光束。另一束光经分光镜透射至固定于载物台上的移动角锥反射镜,经反射返回至探测器中形成测量光束[10-11]。当移动角锥反射镜沿测量轴由位置1移动到位置2时,测量光程分为三部分,分别是入射光程D1,棱镜内部光程D2以及返回光程D3。此时,测量光程相对于参考光程的光程变化量为:

图3 激光干涉位移测量原理
D= (D1+D2+D3)/2
(6)
该相对光程变化会引起探测器处干涉条纹的移动变化,条纹变化数目对应于移动角锥反射镜的位移量,从而实现线性位移测量。
3 几何测量误差推导与分析
在进行线性位移干涉测量时,除了运动平台本身的线性位移误差外,角锥棱镜随运动平台会产生姿态和直线自由度等误差[12],它们不仅是干涉线性位移测量的独立误差源,也是引起其他误差源的源头,需要分别进行推导和分析。
3.1 姿态角引起的几何测量误差
线性运动平台在直线运动过程中的姿态角包括俯仰、偏摆和滚动等3个方面,其中俯仰和偏摆会对角锥干涉位移的测量产生影响[13]。
1)俯仰角对干涉位移测量的影响:
如图4所示,假设移动角锥棱镜由位置1随着平台线性运动至位置2。分别在位置1和位置2处的角锥底面所在平面上建立坐标系∑R1和∑R2,XR轴所在方向为角锥位移运动方向。若在位置2处存在大小为θ绕YR轴逆时针旋转的俯仰误差,在旋转后的角锥底面上建立新的坐标系∑R′2。令F点为入射光线在棱镜底面的入射点,H为出射点,其入射光线在∑R2坐标系下的坐标表达式和方向矢量如式(4)。而在∑R′2坐标系下,入射光的入射点E的坐标以及光线方向矢量为:

图4 角锥俯仰示意图
(7)
这里,zr′=zr/cosθ,根据式(2)计算得到在∑R′2坐标系下出射点G的坐标为:
(8)
此时,外部光程产生的误差分为入射光线产生的误差D1和出射光线产生的误差D2,分别计算如下:
D1=|EF|=-zrtanθ
(9)
D2=|IG|=|ORG| sinθ=
(10)
总的外部光程误差为:

(11)
根据(3)式计算内部光程误差为:
(12)
按照式(6),由俯仰角产生的总光程误差为:
D=(Dout+Din)/2
(13)
通常用于位移测量的角锥棱镜的直角边长约为15 mm,角锥棱镜在空气中的折射率为1.5,在不考虑其它误差因素的条件下,使用干涉仪进行线性位移测量的误差随角锥俯仰角的变化关系列于表1。可以看到,当运动平台俯仰角误差不超过10 urad时,由此产生的位移测量误差小于0.1 μm。

表1 俯仰对干涉位移测量的影响
2)偏摆角对干涉位移测量的影响:
如图5所示,假设移动角锥棱镜由位置1随着平台线性运动至位置2。若在位置2处存在大小为θ绕ZR2轴旋转的偏摆误差。在旋转后的角锥底面上建立新的坐标系∑R′ 2,令F点为入射光线在棱镜底面的入射点,H为出射点,其入射光线在∑R2坐标系下的坐标表达式和方向矢量如式(4)。而在∑R′2坐标系下,入射光的入射点F的坐标以及光线方向矢量为:

图5 角锥偏摆示意图
(14)
根据式(2)计算得到在∑R′2坐标系下出射点G的坐标为:
(15)

(16)
根据式(3)计算内部光程误差为:
(17)
按照式(6),由偏摆角产生的总光程误差为:
D=(Dout+Din)/2
(18)
表2列出使用干涉仪进行线性位移测量的总光程误差随角锥棱镜不同偏摆角的变化关系。可见,当运动平台俯仰角误差不超过10 urad时,产生的影响远低于干涉仪本身的测量精度,可忽略不计。

表2 偏摆对干涉位移测量的影响
3.2 直线度引起的几何测量误差
线性运动平台在直线运动过程中会产生与运动方向垂直的两个直线自由度,它们位于跟平台运动方向垂直的平面内且相互正交,分别称作垂直直线度和水平直线度[14-15]。
如图6(a)所示,假设移动角锥棱镜由位置1随着平台线性运动至位置2。若在位置2处存在大小为d沿着ZR2轴向上平移的直线度误差,在平移后的角锥底面上建立新的坐标系∑R′2。在∑R2坐标系下,令F点为入射光线在棱镜底面的入射点,H为出射点,其入射光线的坐标表达式和方向矢量如式(4)。而在∑R′2坐标系下,入射光的方向矢量保持不变,入射点F的坐标产生了一个沿ZR轴方向大小为d的平移,该平移量称作垂直直线度。由式(2)可得,在∑R′2坐标系下,出射点由H点平移至G点,新的出射G点仍位于ZR2轴上且与入射点F关于XR2′轴对称。从角锥棱镜返回的测量光束也由HK平移至GJ,平移大小|GH|等于直线度误差值d。可见,当垂直直线自由度存在时,反射外部光程|GJ|等于|HK|,入射外部光程都为|EF|,由垂直直线度产生的线性位移外部光程误差等于零。由式(3)可得,内部光程误差也为零。因此,当角锥运动过程中存在垂直直线自由度时,从角锥棱镜返回的测量光束会产生与该垂直度方向一致的平移,这虽然使得接收信号光强存在一定的损失,但不会产生线性位移几何测量误差。类似地,如图6(b)所示,当沿YR2轴正方向的水平直线自由度误差d存在时,与水平直线度误差为0时从角锥棱镜返回的测量光束HK相比,新测量光束GJ产生与水平直线度方向一致的平移,平移量|GH|为直线自由度误差d的二倍,也不会引入线性位移几何测量误差。

图6 角锥直线度示意图
3.3 余弦误差
在进行位移干涉测量时,激光光束方向与被测对象的运动轴方向若未完全准直,则激光测量的长度和被测对象实际运动距离之间会存在差异,该测量误差称为余弦误差[16-17]。
如图7所示,假设移动角锥棱镜由位置1随着平台线性运动至位置2,XR1(或XR2)轴为测量光轴方向。如果测量光轴和平台运动轴之间存在夹角θ,即角锥棱镜随平台运动至以OS为坐标原点的坐标系∑S下。此时,角锥实际的移动距离是|OR1OS|,而干涉仪的测量距离|OR1OR2|,由此产生的线性位移测量误差即余弦误差为:

图7 余弦误差示意图
D=|OR1OS|-|OR1OR2|=d(1-cosθ)
(19)
其中:d为角锥棱镜随平台实际移动的距离。当余弦误差存在时,从角锥棱镜返回的光束的光斑偏移量随移动距离以及余弦角的变化关系为:
△h=|JK|=|GH|=2dsinθ
(20)
将式(20)代入式(19),可推导出利用回光偏移量△h来估算余弦误差的式子:
D=d(1-cos(arcsin(△h/2d)))
(21)

表3 列出了不同回光偏移量以及不同移动距离产生的余弦误差大小
3.4 阿贝误差
在进行位移干涉测量时,当激光光束方向与被测对象的运动轴线方向平行但不完全重合时,被测对象一旦有角度旋转,则将导致测量光程发生变化,由此引起的测量误差称为阿贝误差[18-19]。

图8 阿贝误差示意图
(22)
其中:zr′=d-(d-zr)/cosθ,假设d>zr。根据式(2)计算得到在∑R′坐标系下出射点G的坐标为:
(23)
此时,外部光程产生的误差分为入射光线产生的误差D1和出射光线产生的误差D2,分别计算如下:
D1=|EF|=(d-zr)tanθ
(24)
dsinθ-(d-zr)θ
(25)
总的外部光程误差为:
(26)
根据式(3)计算内部光程误差为:
(27)
按照式(6),总的阿贝光程误差为:
D=(Dout+Din)/2
(28)
表4为在不考虑其它误差因素,取阿贝臂等于135 mm时,干涉仪进行线性位移测量的阿贝误差随不同角锥偏摆角的变化关系。可见,当角锥棱镜存在多至10 urad的角度偏摆时,可产生约0.8 μm的阿贝测量误差。
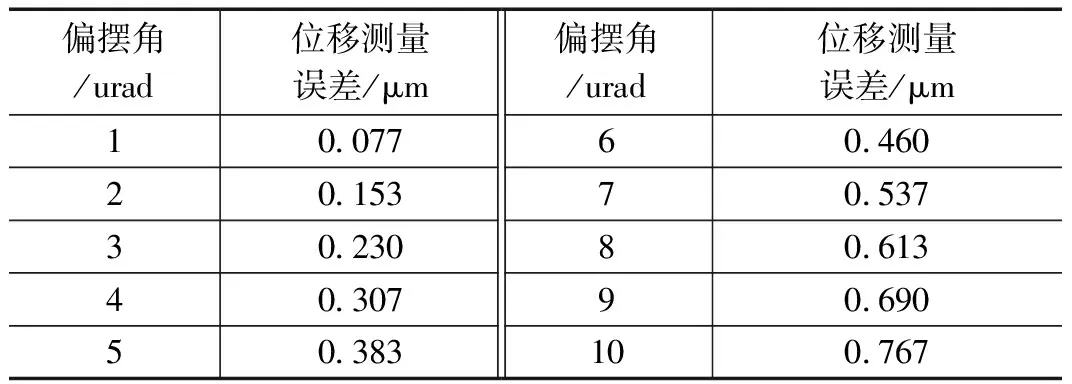
表4 不同偏摆角对阿贝位移测量误差的影响
4 干涉位移测量实验
通过第3节的误差推导和分析,姿态角对干涉位移测量精度的影响通常不超过0.1 μm,可以忽略;直线自由度不产生几何测量误差;余弦和阿贝误差对干涉位移测量产生较大影响。为了对验证上述分析结果,使用Renishaw公司型号为XL80的激光干涉仪,对线性运动平台的位移精度开展测量实验。经过前期测试, 在我们实验室内,XL80激光干涉仪本身存在约0.1 μm的位移测量误差[20]。
对运动平台开展验证实验的测量方法具体如下,如图9测量实物图所示,第一步,按照图9(a)布置位移测量光路,使得激光光轴方向和平台运动轴方向尽量重合,即在阿贝臂近似等于0的情况下开展对运动轴位移精度的测量实验。第二步,按照图9(b)布置位移测量光路,使得激光光轴方向和平台运动轴方向之间产生一个135 mm的平移量,即在有一定阿贝臂值的情况下开展对运动轴位移精度的测量实验。目标测量点的个数和位置需与图9(a)测量时保持完全一致,即重复第一步的测量过程。第三步,仍然按照图9(b)方式布置偏摆角测量光路,使得阿贝臂值存在且相同的条件下,在相同的测量点开展偏摆角度测量实验。为了使得第一步和第二步时两次位移测量实验的余弦条件一致,通过仔细调节激光返回光斑在干涉仪激光头的位置偏移,使得两次实验时光斑的返回位置基本一致。通过尽量缩短总测量时间长度以及控制两次实验的测量时间总体一致的方式,使得环境变化以及干涉仪本身不稳定性对两次位移精度测量结果的影响接近一致。获取到以上实验数据后,利用实验数据去验证第3节中误差推导分析的方法是,使用实验第三步中的偏摆角以及阿贝臂值计算出每个目标测量点的理论阿贝误差值。将理论阿贝误差值叠加到第二步中的位移测量结果上,对第二步的测量结果进行阿贝误差修正。下一步,对修正后的位移测量精度与实验第一步阿贝臂为0的位移精度进行对比分析。
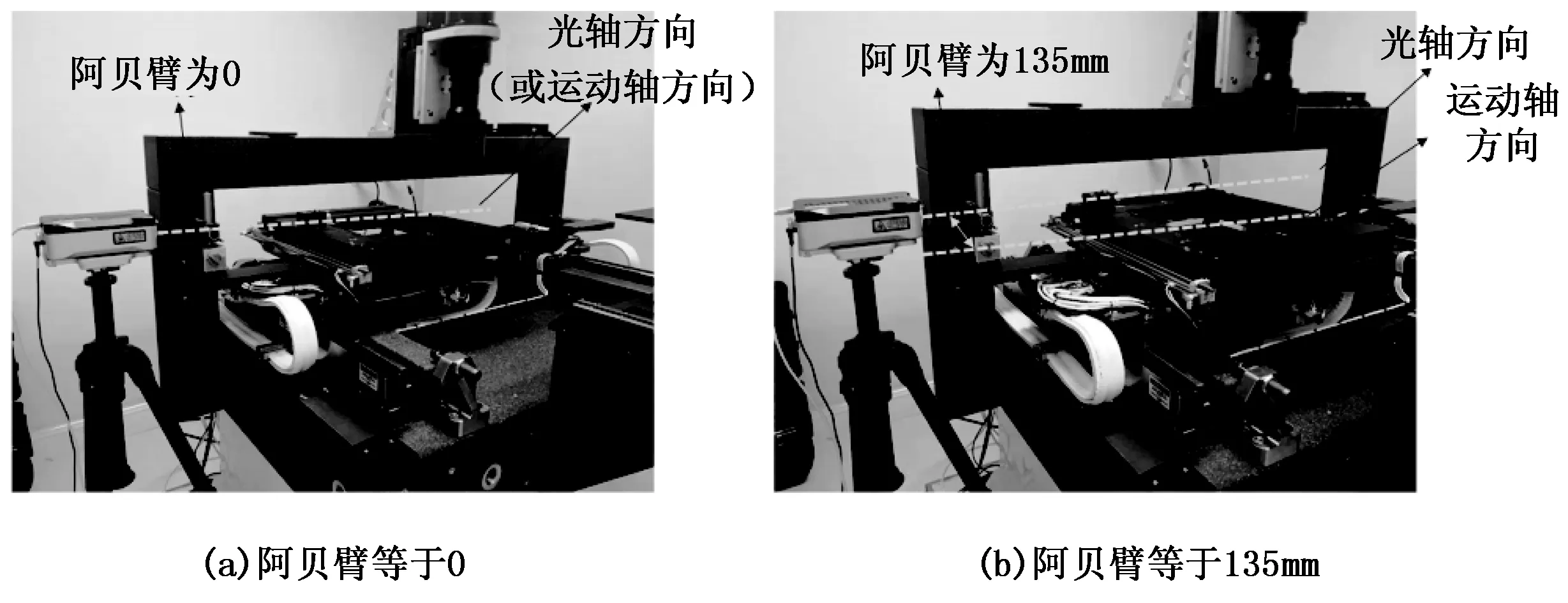
图9 干涉位移测量实物图
实验过程具体如下:1)按照ISO230-2测量标准,当阿贝臂近似等于0时,在测量总行程300 mm范围内,每间隔50 mm取一个目标测量位置,共7个目标测量点。从第1个目标测量点开始到第7个目标点结束,完成一次单向测量,之后进行第7个目标点到第1个目标点的返向测量。共循环重复上述往返测量5次,每个测量点单向可以产生5个线性位移测量数据。2)取阿贝臂等于135 mm,重复第一步的测量过程,每个测量点单向可以产生5个引入阿贝误差的位移测量数据。第三步,当阿贝臂近似等于135 mm时,对7个目标测量点位置分别进行单向偏摆角度误差测量,共循环重复测量5次,每个测量点可以产生5个角度误差测量数据。
表5为当阿贝臂近似为0进行位移测量时,对每个目标测量点进行各双向5次测量的精度结果,其中“+”号代表从起点至终点方向,“-”号代表从终点返回起点的方向,单次测量精度依次分别为2.940 μm,2.851 μm,2.805 μm,2.898 μm,2.830 μm。本批次位移误差测量结果主要由待测位移平台本身的位移误差以及干涉仪的测量误差构成,其中干涉仪的测量误差主要包括环境变化引起的误差、余弦误差以及测量系统本身的固有误差。
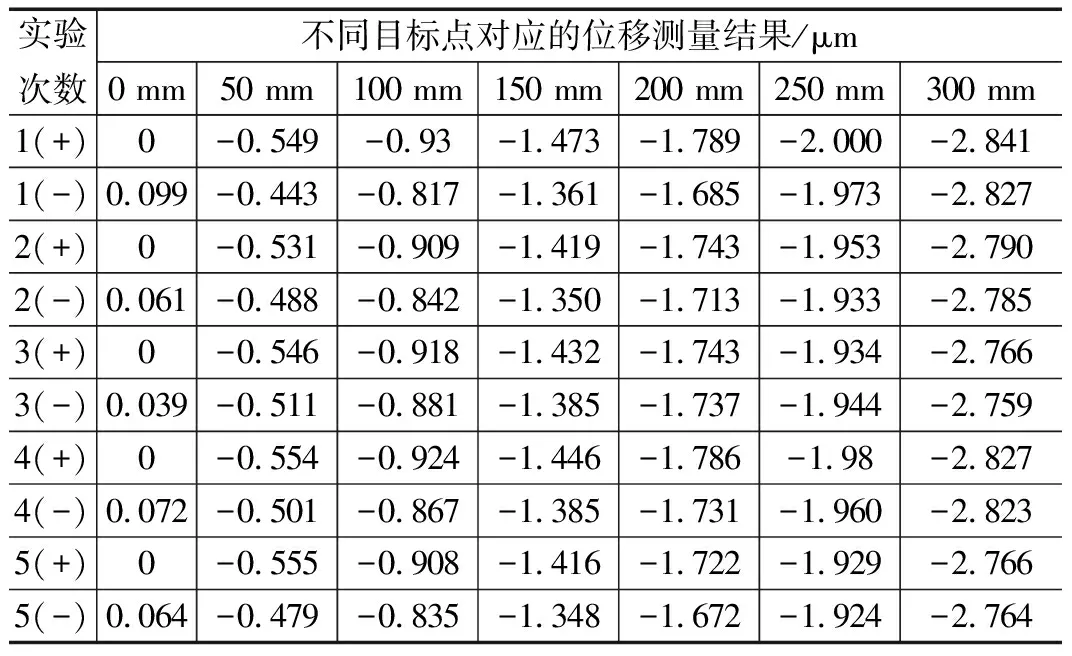
表5 阿贝臂近似等于0时的位移测量结果
表6为当阿贝臂为135 mm进行位移测量时,对每个目标测量点进行各双向5次测量的精度结果,其中“+”号代表从起点至终点方向,“-”号代表从终点返回起点的方向,单次测量精度依次分别为3.325 μm,3.327 μm,3.345 μm,3.274 μm,3.205 μm。本批次位移误差测量结果与表5相比,除了包括环境变化引起的误差、余弦误差和测量系统本身的固有误差以外,还包括阿贝测量误差。
表7为当阿贝臂近似等于135 mm进行角度测量时,在目标测量点偏摆角的测量结果。然后利用式(28)可计算得到当阿贝臂为135 mm进行位移测量时引入的阿贝误差测量值,列于表8,并将其叠加到表6中对应目标测量点的数据上,对阿贝误差进行补偿修正。表9列出阿贝误差修正前后的精度结果和阿贝误差近似为0 的实验测量结果。通过对比可见,使用第3节的误差分析方法对存在阿贝误差的干涉位移测量结果进行修正,修正后的测量精度与阿贝臂近似为0的结果接近。需要说明的是,实验过程中光斑回光偏移量基本保持相同,余弦误差对各次测量结果的误差影响相当。

表6 阿贝臂等于135 mm时的位移测量结果
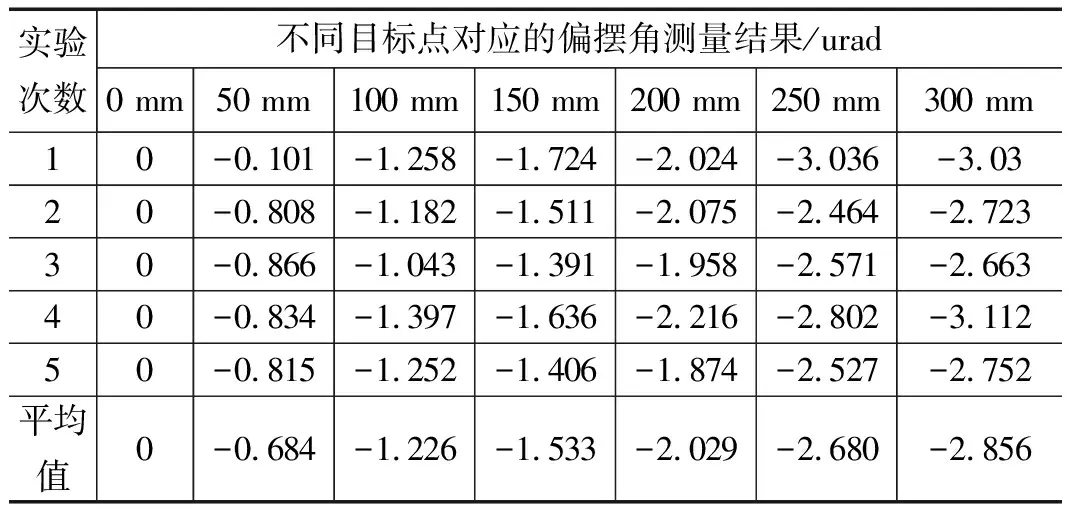
表7 阿贝臂等于135 mm时的偏摆角测量结果

表8 阿贝误差计算值
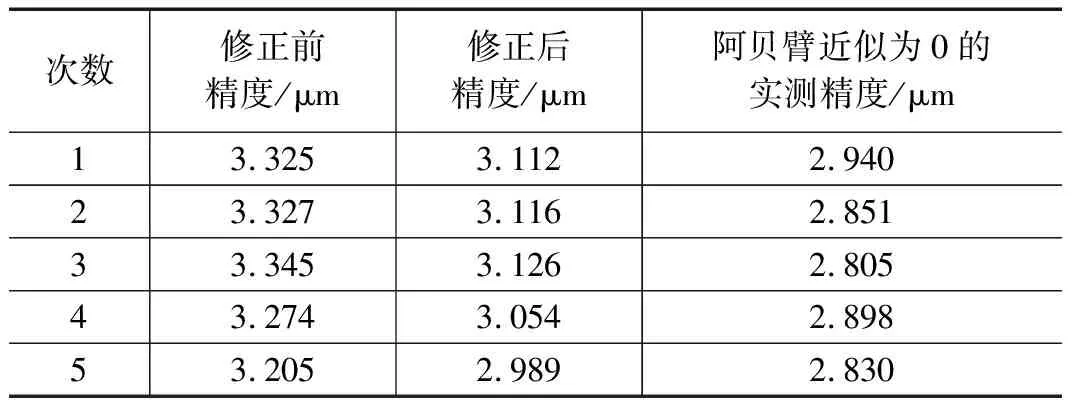
表9 阿贝误差修正前后精度对比
5 结束语
基于激光干涉测量原理和角锥棱镜的光学特性,对使用角锥棱镜进行干涉位移测量的几何误差进行了推导、分析和相关实验。结果表明,姿态角对干涉位移测量的影响通常不超过0.1 μm;当角锥存在直线自由度误差时,返回测量光束的光斑中心会产生与水平或垂直直线度方向一致的平移,但不会引入几何位移测量误差;推导给出角锥棱镜测量光束的回光偏移量与余弦误差之间的关系,阿贝误差与阿贝臂值和角锥棱镜偏摆角之间的关系。干涉位移测量实验表明,通过修正阿贝误差,可以有效提高位移测量精度。对于使用平面反射镜进行干涉仪测量的方式,干涉仪的参考光路和测量光路与角锥棱镜方式存在明显不同,其几何测量误差形式和特性将在后续工作中开展分析。
