TSW2500型500kW发射机嵌入式控制系统设计
2022-03-29杜宏文
杜宏文
(国家广播电视总局二0二二台 新疆 喀什 844000)
0 引言
TSW2500型号的发射机是我国目前科技研发中技术含量最高的研究成果之一,在实际应用中,此种型号的发射机具有操作方便、性能稳定、智能化程度高、综合性能较强的显著优势。通过对发射机的有效控制,可以建立操作端与执行端两者之间的良好交互渠道,倘若在发射机运行发生故障时,可通过控制前端开关进行故障排除,并通过调节其频率,进行主动运行的综合调控[1]。总之,控制发射机可为作业人员的安全提供有力保障,并为发射机前端的运行提供稳定支撑。为了实现对发射机的预控制需求,此次研究将控制系统构建置于微控制层面分析,尽管相关研究在较早时期开始投入,但因控制系统在运行中缺少与之匹配的算法与技术作为支撑,导致前端发出控制信号在终端接收时,极易受到外部环境干扰,尤其是在执行故障排除工作时,倘若终端无法及时接收信号,不仅会干扰发射机运行的稳定性,也会影响其发射信号的调谐功能。为确保发射机在多个领域中应用发挥其既定效果,本文以此型号的500 kW发射机为例,结合其运行需求,从硬件与软件方向,开发一种针对此发射机的嵌入式控制系统。
1 硬件设计
以核心模块组成作为硬件的基本结构,为实现对发射机的合理控制,构建如图1的硬件结构。
从图1可以看出,本文控制系统当中通过TTL模块、ADDA模块、连接器实现对FPGA控制器与功放分机和PC机的连接。整个控制系统当中,以ARM微型处理器作为控制核心,联合多个FPGA控制器共同拼接,组成完整监控网络。针对本文型号发射机电源的选择,选用KFU8-CRG2-1.D型号电源,通过单通道信号调节装置,实现不同电源之间的通用[2]。应用KFU8-CRG2-1.D型号电源可实现通电/断电延迟调节,并且具备编程高、低报警的应用优势。KFU8-CRG2-1.D型号电源及功放模块的运行状态等外部模拟量输入信号,通过ADC进行模数转换,得到符合控制系统处理要求的数字信号。在转换过程中,数字信号能够与TTL模块输出的信号一同汇入FPGA控制器当中,完成对控制信号采集和处理[3]。完成处理后,信号还能通过DAC模块进行转换,从数字信号转变为点型号,并由连接装置输出,将其在控制系统上位机当中显示。
本文选用RS-485模块,因为其接口具有良好的抗噪声干扰性,长的传输距离和多站能力等上述优点就使其成为首选的串行接口接口的信号电平值较高,易损坏接口电路的芯片,又与TTL电平不兼容,故需使用电平转换电路方能与TTL电路连接。因为RS485接口组成的半双工网络,一般只需两根连线,所以RS485接口均采用屏蔽双绞线传输。RS485接口连接器采用DB-9的9芯插头座,与智能终端RS485接口采用DB-9(孔),与键盘连接的键盘接口RS485采用DB-9(针)。RS-485模块特性:逻辑“1”以两线间的电压差为+(2—6)V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。接口信号电平比RS-232-C降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL电路的连接。
ADDA模块主要由A/D转换电路构成,为了满足本文系统在运行中的控制需求,在电路转换节点中内置AD2766芯片,此芯片可外接100.0 mV~3.5 V的参考信号,芯片中的转换器可以用于逼近信号的实时转换,差分采样装置可以集成在电路中进行信号的差分获取。在此基础上,内置信号放大保持器,用于放大待控制信号。将串行连接在电路中的接口与不同终端电压进行对接,其中内部电压接口与REF接口对接、电容管脚接口与APB接口对接,在接口位置输入两组差异信号,可以通过对信号值的模拟,进行有效转换范围与有效通信信道的差分选择。
本文控制系统选择STM32F103C8T6型号的32位ARM微控制器,该型号微控制器的技术指标及参数见表1。
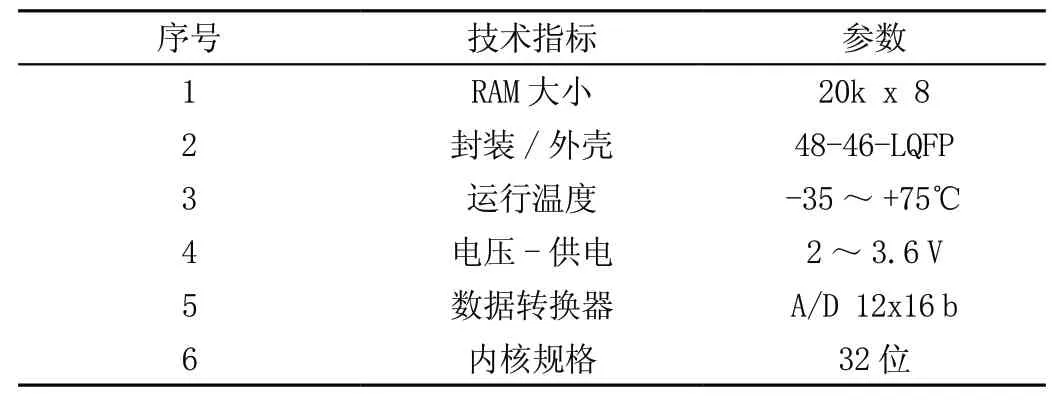
表1 ARM微控制器技术指标及参数表
当前STM32F103C8T6型号ARM微控制器主要应用于工业领域、汽车领域、电子领域和计算机领域,具有十分广阔的发展前景,将该型号微控制器应用到本文控制系统当中能为系统提供更加便利的运行条件,并进一步提高本文控制系统控制效果。
2 软件设计
2.1 基于FPGA的发射机发射信号采集
在完成控制系统硬件结构设计基础上,基于FPGA的应用,对发射机发出的信号进行采集。在此过程中,明确FPGA是一种在可编程控制器基础上的衍生产物,在信号采集阶段集成FPGA可解决定制电路不足问题[4]。在掌握FPGA采样原理后,按照“取样→保持处理→量化处理→标准编码”的流程,进行发射信号采集。为了确保采集信号与发射机前端运行控制需求匹配,可对取样频率进行定义,如下公式所示:
式中:fp为发射机信号的采集频率;fΩ为前端发射的最高频率。只有在采集信号过程中,满足上述提出不等式需求,确保信号频谱中的上下两边带与采集频率不会发生重叠或相互干扰问题,否则会导致采集信号出现失真或携带噪声等问题。而一旦由于操作疏忽,出现采集的发射信号中携带噪声现象,需要对信号进行放大处理,进行信号阵元的分析,根据放大后信号在信道中的波束,对信号进行二进制的表达,获取发射信号的最高有效位与最低有效位,根据不同操作位信号的时延,形成一个信号传输周期。对存在噪声的信号进行降维处理,并根据信号的阵元,对采样成果进行A/D转换,提取转换后的信号波束,将呈现离散状态的波束汇聚在一起,形成一个完整的发射信号波束。按照上述提出的处理方式进行噪声信号处理,实现对高精度信号的有效采集。
2.2 基于小波算法的发射机功放状态检测
在完成对发射机信号的采集后,引进小波算法,来检测获取的信号,以此种方式实现对发射机功放状态的实时检测。在此过程中,考虑到功放可同时支持发射机的远程与本地控制[5],其中本地控制可直接在控制系统的操作端点击触摸屏幕的功能按键实现,针对其中的远程控制,则需要通过接口通信进行信号处理后再进行控制。功放的工作状态转换结构示意图见图2。
根据图2所示,发射机功放共对应5种状态,分别为本地运行状态、初始化状态、远程运行状态、复位运行状态、故障运行状态。为了更好地实现对发射机的控制,应实时对其进行状态的检测,并结合前端控制需求,对功放执行不同的控制指令。引进小波算法,根据前端收集信号在终端呈现的波形图,对其进行信号衰减性分析,其中“波”是指信号在传输中的波动性,或信号在正负两极之间的振荡幅度。相比时空分析法,使用此种方式可通过对伸缩平移运算,对接收信号进行多方向细化处理,当细化处理后信号得到高频时间细分区段,小波可以根据时频信号需求,进行信号自动聚焦,达到一种自适应检测的目的。上述提出过程,可用下述计算公式表示:
式中:p为功放的工作状态;x为小波转换算子;θ为高频时段;k为初始化状态;ai为对接收信号进行第i个尺度的细化处理;μ为复位状态。按照上述方式,实现基于小波算法的发射机功放状态检测。
2.3 PC端控制程序设计
在完成上述相关设计后,对接控制发射机与控制端(PC端),对发射机的控制程序进行设计。通常情况下,PC端的运行环境为Windows环境,对应串口的通信方式可以通过控件或API通信函数表示。相比API通信函数,使用控件进行控制程序设计操作更为简单,在确定基于控件的控制程序后,使用PC端提供的VC++6.0编程工具,进行通信接口设计,并将通信接口与发射机控制端进行对接,此时,后端便可根据前端设计需求,进行串口控制的源代码开发。控制中,启动PC端控制程序,在操作显示屏幕上随机生成一个token,等待控制端进行正确用户身份的标识,完成对控制用户标识的检验后,PC端的控制程序将自动与服务器进行对接。对接后,启动程序执行控制指令,根据指令的指示方向,进行本次任务进程的生成,当进程与token保持一致后,主动跳转下一进程,当进程与token存在偏差,需结束当前的控制进程,等待PC端的重新连接,直到控制进程与控制需求保持高度一致。
3 实例应用分析
基于以上论述内容,从硬件和软件两个层面实现对控制系统的理论设计,为进一步验证该控制系统在实际运行环境当中的应用效果,设计以下应用实验。
本文选择某工业生产中常见的发射机进行研究,该发射机的型号为TSW2500,运行功率为500 kW。已知该发射机在运行过程中,需要确保其模数转换误差为±5 mV,公差范围在-20~+20 mV以内,满足发射机的控制精度要求。控制该型号发射机在运行过程中的温度始终保持在28~35 ℃,输入和输出范围均在0~5 V。在应用过程中,将显示与控制一体化测试平台与本文上述设计的控制系统进行连接,并将系统内部数据采集单元与发射机运行单元进行连接,针对发射机和控制系统在运行过程中的应用环境进行实时监测,并观察其是否存在异常运行现象。
通过控制一体化测试平台显示的温度、电压等参数进行观察得出,系统在运行过程中,其各项数值均能够控制在合理范围内,确保发射机的稳定运行,初步证明了本文提出的控制系统在实际应用中具有可行性。为了进一步验证本文控制系统在实际环境中的运行精度,选择将系统运行时模数转换误差作为评价指标,通过计算控制过程中模数转换的误差和公差,对控制系统的精度进行评价。模数转换的误差计算公式为:
式中,σ为模数转换误差;LSB为二进制接口规范标准精度;bits为控制信号的数据量;Vref为转换系数。根据上述公式,计算得出模数转换的误差,并再通过公式(4),计算得出模数转换的公差:
式中,σ为模数转换的公差。根据上述公式(3)和公式(4)计算出相应实验数据,并记录其结果,见表2。

表2 控制系统应用效果记录表
从表2可知,把本文的控制系统应用到发射机控制时,模数转换误差均在-2.4~+3.2 mV,模数转换公差均在-15.3~+12.4 mV,其模数转换误差和模数转换公差均在规定的合理范围内,说明模数转换的精度满足系统的运行需要。因此,通过上述实验进一步证明,本文提出的控制系统能够实现对模糊信号的高精度转换,进一步提高了对发射机控制的精度,确保发射机能够按照规定的控制指令完成各项操作任务。
4 结语
综上所述,本文针对特定型号的500 kW发射机,提出了一种全新的嵌入式控制系统,并将其应用到真实运行环境当中,证明了该系统的运行优势,并证明了引入FPGA控制器后控制效果得到进一步提升。但此次实验也存在一定不足,例如没有进行控制界面可视化操作的检验、没有在多个测试环境中进行系统运行可行性的分析等。因此,还需要在后续进一步的研究中,对设计的成果进行多次检验,设置多个具有相同功能的控制系统,将其作为传统系统,与本文系统在实际应用中的性能进行检验。在未来阶段,市场发展将对控制系统的运行提出更高的要求,而本文设计的系统现如今仍处于开发测试阶段,仅依靠本文测试的实验结果,仍无法将其在市场内广泛推广使用,还需要在进一步的优化设计中,按照模块化测试方式,进行系统运行的同步测试,以此种方式,对系统功能进行丰富,实现对系统性能的优化。此外,可在后续的研究中,尝试使用国产硬件设备代替进口设备,开发真正属于我国的科研成果。
