自主可控特高压直流控制保护系统设计与研发
2022-03-27沈天骄王永平
沈天骄 仲 浩 王永平 周 强 邹 强
自主可控特高压直流控制保护系统设计与研发
沈天骄 仲 浩 王永平 周 强 邹 强
(南京南瑞继保电气有限公司,南京 211102)
针对特高压直流输电工程,本文设计并开发基于自主可控平台的特高压直流控制保护系统。首先,分别设计自主可控控制保护系统的软、硬件平台,并将平台自身特点与特高压直流输电系统要求相结合,设计可靠的冗余通信方式和完备的主机状态监视功能。然后,在自主可控平台上设计特高压直流控制保护系统,并开发功能样机。最后,在基于实际工程参数的实时仿真系统中,进行系统性能测试。试验结果表明,该自主可控特高压直流控制保护系统功能完善、性能优良,具备工程化应用条件。
特高压直流输电;控制保护系统;自主可控;设计方案;实时数字仿真
0 引言
我国已建成多个特高压直流输电工程,在新能源外送、跨区域电网互联等方面发挥了重要作用。“十四五”期间,国家仍将规划建设多个特高压直流输电工程[1-3]。经过多年发展,特高压直流工程成套设备已具有完全自主知识产权[4-6],但是直流控制保护系统的核心芯片大量使用进口产品,面临供应链“卡脖子”风险。在当前复杂的国际形势下,实现关键电力设备的自主可控对于保证电网安全、保障国民经济稳定发展具有重要意义[7-8]。
近年来,国内芯片半导体产业飞速发展,陆续出现了能满足电力设备使用需求的高性能芯片和元器件[9-11],为研制自主可控控制保护平台提供了条件。本文设计基于国产芯片的自主可控特高压直流控制保护系统,并研制功能样机。首先介绍自主可控控制保护平台的软、硬件架构和平台的特点,然后基于该平台设计特高压直流控制保护系统,最后在实时数字仿真系统(real-time digital simulation system, RTDS)中进行工程应用试验,充分验证系统的功能和性能。
1 自主可控特高压直流控制保护平台设计
自主可控特高压直流控制保护平台在已有统一先进控制保护平台(unified advanced platforms for protection and control, UAPC)[12-13]的基础上,按照软件、硬件分层解耦的思路,实现软、硬件全国产化替代和升级,做到完全自主可控,总体设计原则为:
1)在已有成熟平台进行升级,沿用嵌入式、分布式的整体结构,保持既有特高压直流控制保护功能完整性和一致性。
2)硬件接口适配特高压直流控制保护系统开发需求,充分考虑各类采样和通信接口。
3)考虑芯片可替代性,硬件和软件模块化设计,应用软件和底层驱动解耦设计。
4)冗余化设计,保持可靠性高、稳定性强的特点,整体性能不降低。
自主可控特高压直流控制保护平台主要包括控制保护主机、I/O单元、通信装置、监控系统等,本文将重点介绍控制保护主机。
1.1 主机平台硬件设计
各类具有自主知识产权的国产芯片已陆续应用在电力二次设备中,特高压直流控制保护系统复杂、主机运算量大,对处理器芯片性能和稳定性要求较高,一般国产处理器芯片难以满足要求。
目前,国内具备完全自主知识产权的高性能处理器芯片主要包括龙芯、飞腾、全志和麒麟等,应用较多的芯片及主要参数见表1。
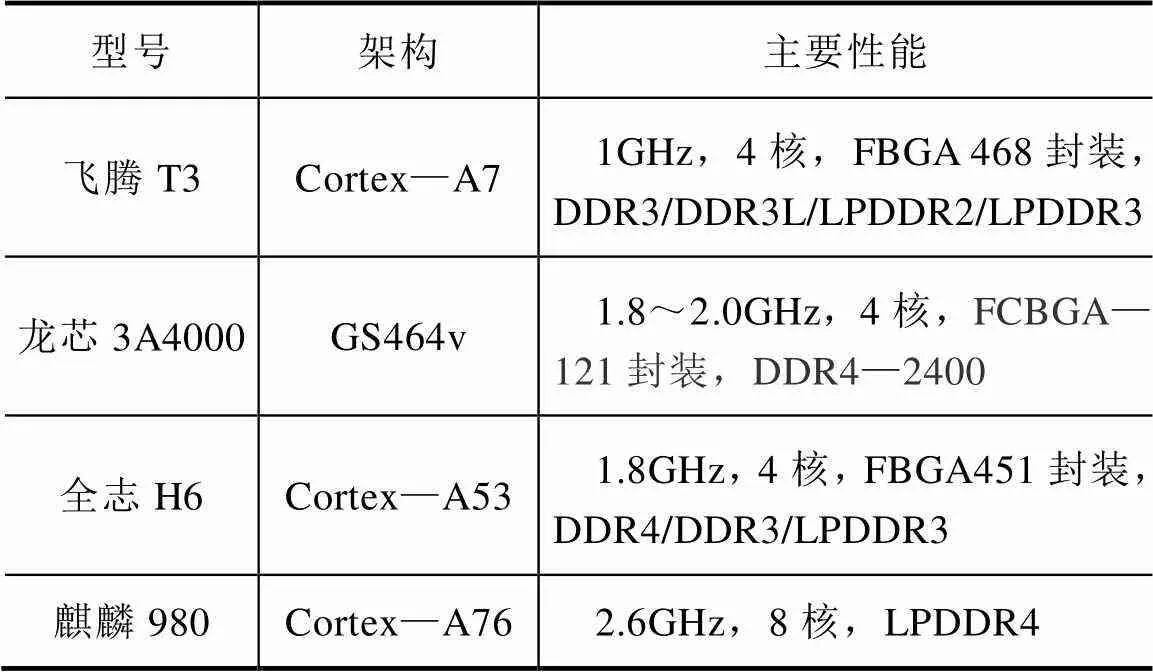
表1 国内主要处理器芯片
全志在语音处理、智能家居领域应用较为成熟,麒麟主要用于智能手机等智能终端设备,龙芯和飞腾则在高性能计算、工业控制领域应用较多,电力行业也有所应用。自主可控控制保护主机核心芯片选型需要综合考虑:①芯片厂家技术自主性,采用自建架构或永久授权架构,关键技术不受制约;②处理器生态建设有所积累,技术支持完善,具有电力行业应用背景;③芯片相应开发工具功能完备、可靠,具备自主知识产权;④接口资源和运算负载率能满足特高压直流输电应用场景需求;⑤工作温度范围宽,送端换流站一般自然环境较为恶劣;⑥具备内存纠错(error correcting code, ECC)功能,防止单bit出错导致直流系统运行异常。本平台主控芯片选取的某国产性能处理器芯片集成了4个64位高性能核,主频超2GHz,工业级工作温度范围是-40℃~85℃,片内、片外内存均支持纠错功能。
控制保护主机采用基于分布式通信的多处理器硬件架构,插件配置为“CPU插件+数字信号处理(digital signal processing, DSP)插件+光纤扩展插件”的形式,自主可控平台硬件示意图如图1所示。CPU插件负责实现配置管理、后台通信等功能;DSP插件负责控制保护算法实现等功能;光纤扩展插件用于光纤接口的扩展。
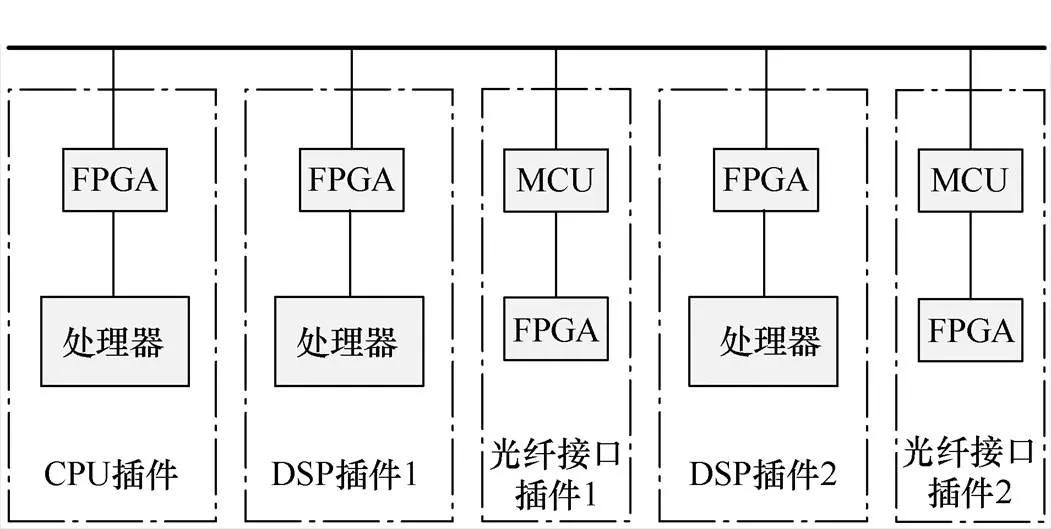
图1 自主可控平台硬件示意图
CPU插件采用“国产处理器+国产大容量现场可编程门阵列(field programmable gate array, FPGA)”的硬件方案,处理器与FPGA之间经过吉比特介质独立接口(reduced gigabit media inde- pendent interface, RGMII)总线通信。核心DSP插件采用“国产高性能多核处理器+国产大容量FPGA”硬件方案,处理器与FPGA之间经过高速串行扩展总线(peripheral component interconnect express, PCIE)通信。光纤扩展插件采用“国产微控单元(microcontroller unit, MCU)+国产大容量FPGA”硬件方案,MCU用于加载FPGA程序。
主机内部板卡经过背板总线,采用PCIE或RGMII总线及自主开发的多路复用高速串行(high performance time determinate multiplexed synchronous serial bus, HTM)总线进行数据交互。主机对外接口支持光纤以太网、控制器域网(controller area network, CAN)总线、高级数据链路控制(high-level data link control, HDLC)、IEC 6044—8等协议,并且预留丰富的协议拓展接口,可以根据不同的应用场景进行灵活配置。
1.2 主机平台软件设计
已成熟应用的UAPC平台软件具备完全自主知识产权,软件为模块化解耦设计,不依赖具体硬件,从底层驱动到上层应用均具备自主。自主可控主机平台软件在UAPC平台的基础上,针对国产化芯片进行功能调整和优化。自主可控平台软件示意图如图2所示,自主可控控制保护主机平台软件由三个部分组成,从下到上依次为系统软件、工具软件和应用层软件。
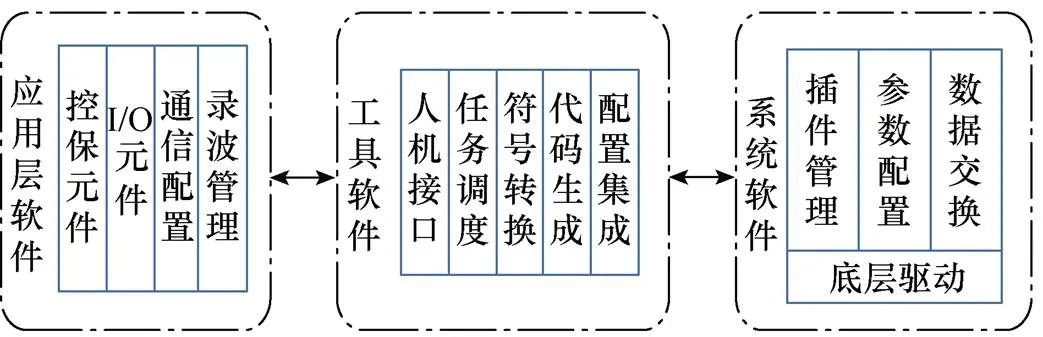
图2 自主可控平台软件示意图
系统软件主要为插件的底层驱动,实现配置管理、任务调度、数据交换等功能,需要针对处理器芯片进行适配性开发。工具软件是应用功能和系统软件的接口,开发人员在工具软件上进行控制保护功能的开发,对下屏蔽硬件和系统软件差异。应用层软件主要是控制保护逻辑程序、数据采样处理程序、通信数据处理程序。自主可控平台软件设计时需要综合考虑:①冗余性设计,将双重化冗余的程序分散在不同插件、不同内核;②负载分配,根据程序运算量将模块化的程序平均调整至不同内核;③数据交换量,联系紧密的应用元件布置于同一内核,减少总线的数据量。
平台软件整体采用面向对象的思想进行设计,以元件封装的形式打包数据计算和逻辑处理过程,可以提升代码的可靠性、可读性和重用性。软件开发工具采用可视化、图形化编程模式,支持层次化设计,开发人员可以直观地梳理数据流及设计功能逻辑。平台软件主要具备以下特点:
1)模块化分层,面向对象,结构清晰。
2)系统程序统一管理,编程接口统一管理,后期维护方便。
3)控制保护功能和通信功能独立配置,避免非核心进程影响核心逻辑运算。
1.3 主机监视功能设计
特高压直流控制保护系统中的装置必须具备完善的自监视功能,装置内部发生软、硬件故障时,能及时检测到异常并采取系统切换等措施,避免扩大故障影响范围[14]。
传统采用多层次混合结构监视方法,依赖某一插件监视系统其他各插件的运行情况,在某些故障情况下较难区分是负责监视的板卡异常还是被监视板卡异常。自主可控平台的控制保护主机根据平台的软、硬件特点,充分利用处理器多核的特性,采用“核内自监视+核间平行监视”的方法,每一个核都会监视其他核,同时也受到其他核监视。自主可控主机监视逻辑如图3所示。
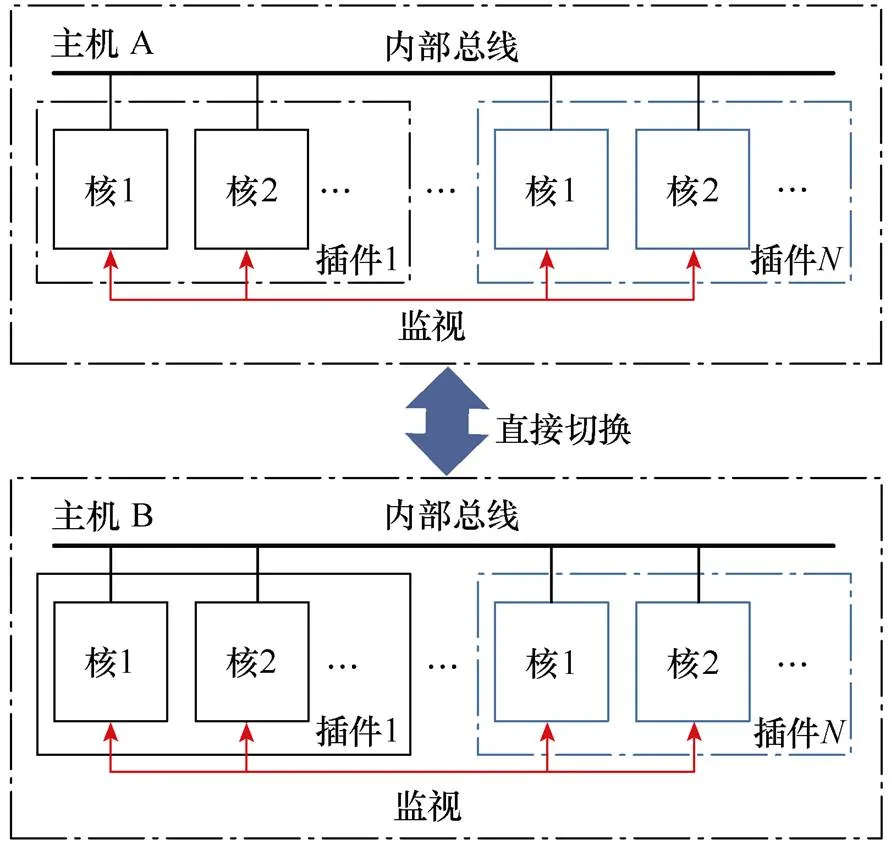
图3 自主可控主机监视逻辑
监视对象可包括总线寄存器循环冗余校验(cyclic redundancy check, CRC)错误统计、各核负载率、各级中断负载、HTM总线数据校验、中断计数等,本主机监测到某核出现异常时,根据特高压直流系统主机三级故障划分方法将异常主机置相应故障等级,退出值班运行状态,冗余配置的对系统主机经系统间通信获取异常信息后,立即进行系统切换。
这种监视方法主要具有以下优点:
1)充分保证能够及时准确地定位故障,没有监视盲点。
2)平行结构检测到异常时无需经过第三方中转异常信息。
3)主机运行异常时,能立即进行系统切换,有效缩短系统切换时间。
1.4 主机外部通信设计
特高压直流系统结构复杂,主机的外部通信模式多样,站间、极间、主机间和系统间等通信必须快速、安全、可靠[15]。自主可控主机通信方式如图4所示,自主可控系统的外部通信采用完全冗余的设计原则,将外部通道配置在不同的插件中,同时从硬件和软件上防止单一元件故障导致的通信异常。

图4 自主可控主机通信方式
主机通信链路、主机接口模块、FPGA芯片、处理器芯片等外部结构完全冗余,从而保证通信的物理链路完全独立。同时,系统软件保证两路通信数据互为备用,两路冗余数据在两个插件之间通过PCIE总线进行数据交换。应用层程序处理两路冗余数据时按照“同发同收”的原则,冗余数据同时经两个外部通道发送至外部设备,接收到的冗余数据则按照主通道和备用通道进行划分,后续逻辑处理时优先使用主通道接收到的数据,在检测到主通道通信异常时,则切换至备用通道的数据,从而保证数据安全可靠。
1.5 自主可控平台的特点
自主可控系统在保持既有UAPC平台功能的基础上,具备以下新的特点:
1)主机集成度高,数据处理和计算能力强,负载率可有效降低。
2)多核并行运算,可在不增加插件的条件下实现应用功能冗余设计。
3)主机通信实现完全冗余设计,充分保证通信数据可靠性。
4)利用处理器丰富的多核配置,具备更加完善的监视功能。
5)运算速度提升,控制保护程序最快执行周期从UAPC平台的75ms提升至20ms,可提升触发角控制、阶跃响应、换相失败预测控制[16]、锁相环计算[17]等对实时性要求高的应用功能的执行效果。
2 自主可控特高压直流控制保护系统设计
2.1 总体架构
自主可控特高压直流控制保护系统在设计上采用分散、分布式结构,设备之间通过各类总线进行数据交互,实现系统的协调、稳定运行。自主可控特高压直流控制保护系统设计方案如图5所示,以单极设备为例,系统自上而下分为站控层、设备层和现场I/O层,分别实现厂站级数据监视与控制、控制保护功能、现场信号采集和传递等功能。
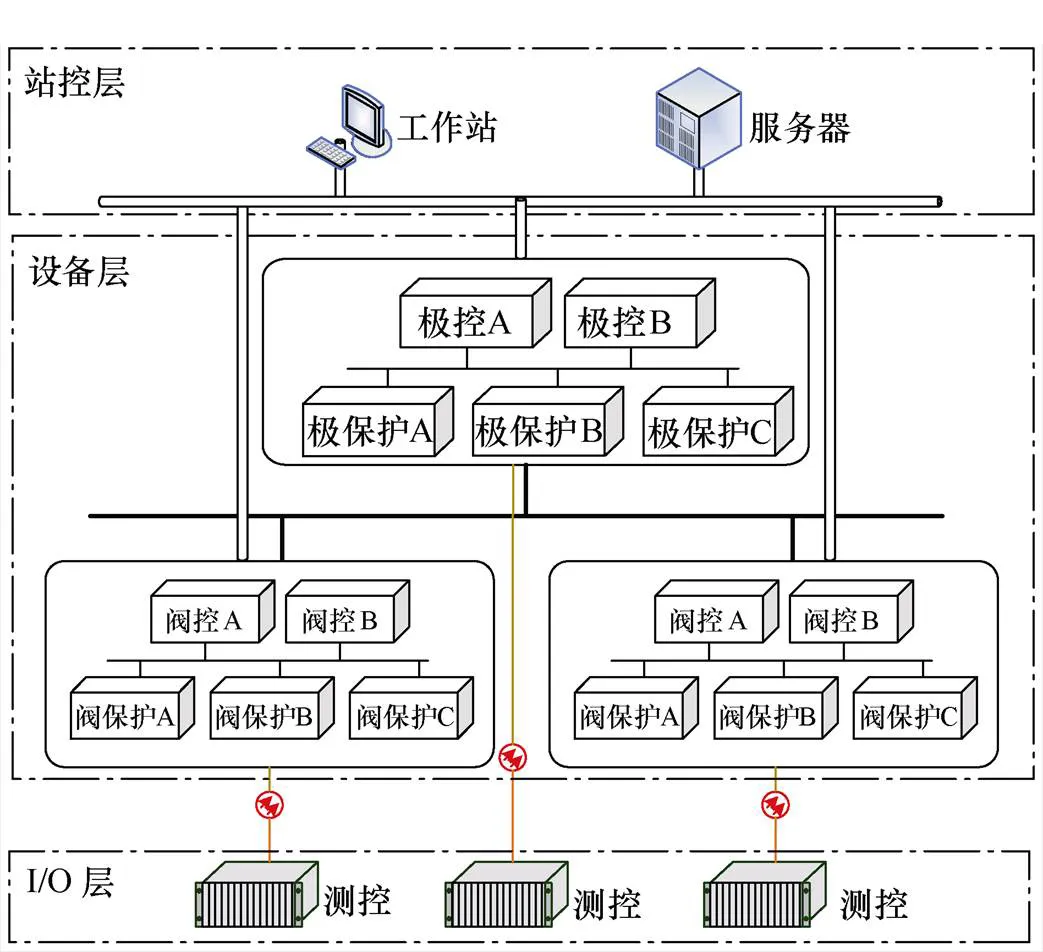
图5 自主可控特高压直流控制保护系统设计方案
设备层的控制保护主机与I/O层的测控装置之间采用基于光纤介质的现场总线进行通信,可完成模拟量和数字量的交换。测控装置采集的模拟量经IEC 60044—8标准总线协议上送至控制保护主机进行后续的数据处理,数字量经光纤以太网和控制保护主机进行数据交换。控制保护主机间采用基于光纤介质的高速以太网协议进行通信,通信高速、可靠、抗干扰能力强。控制保护主机和站控层的运行人员控制后台之间采用IEC 61850协议进行通信,上送装置运行数据至后台,接收运行人员下发的指令。
在物理连接上,光纤以太网协议根据不同应用场景,支持交换机组网和光纤点对点的方式;IEC 60044—8总线采用光纤点对点的连接方式;IEC 61850协议的监控网络采用交换机组网的形式,统一组成站内数据采集与监控(supervisory control and data acquisition, SCADA)网。
2.2 控制保护设备配置方案
按照分层设计的思想,控制保护系统从上到下依次分为双极层、极层和换流器层[18]。进行功能划分时,应遵循将控制功能尽量下放至较低层级的原则,尽量减少双极层设备的数量,防止单一设备故障的影响范围扩大。因此,将双极层的功能调整至极层设备中,极层设备通过比较两极的功能状态,选取状态较好的极作为控制极,实现本极功能的同时也执行双极层的功能。极层设备主要包括极控制主机、极保护主机,换流器层设备主要包括换流器控制主机和换流器保护主机。控制主机采取主备冗余配置,保护主机采取三取二冗余配置,进一步提升系统的可靠性。针对特高压直流工程典型的双极四阀组十二脉动拓扑结构,两个极分别配置极控制主机和极保护主机,四个阀组分别配置换流器控制主机和换流器保护主机。
极控制主机主要实现双极区/极区的顺序控制及联锁、双极的功率/电流分配、本极的功率/电流指令计算、无功控制、安稳控制等功能。换流器控制主机主要实现本阀组区域的顺序控制及联锁、触发脉冲的实时计算、换流变分接开关控制、阀冷设备控制等功能。
保护主机功能按照保护区域进行划分,极保护主机保护范围包括双极区设备、极区设备和直流滤波器区设备,换流器保护主机保护范围包括换流阀区设备和换流变区设备。
3 系统验证
采用已投运的±800kV上海庙—山东特高压直流输电工程(下文简称上山工程)参数,在RTDS系统中对自主可控特高压直流控制保护样机进行了大量的测试,与已有的基于UAPC平台的上山工程仿真系统试验结果进行对比,受篇幅限制,本文选取部分试验结果。
3.1 解锁试验
直流双极全压运行,功率模式为双极功率控制,功率指令1 000MW,两站极1起极波形如图6所示,起极过程中电流、电压稳定,迅速达到目标值。与UAPC平台的上山工程仿真系统相比,自主可控系统平台直流起动过程中的电流、电压响应过程基本一致,由于自主可控系统的程序执行周期快,电流、电压建立过程相对较快。同时,自主可控主机相比于UAPC平台主机的最大负载率下降约15%。
3.2 闭锁试验
直流双极全压运行,功率1 000MW,模拟整流站极1发生极X闭锁,两站波形如图7所示,故障发生后,整流站立即移相,电流迅速降为0,逆变站投旁通对后电压降为0。与UAPC上山工程仿真系统相比,自主可控系统在闭锁过程时序保持一致的前提下,同样由于执行周期的提升和优化,闭锁执行过程相对较快。
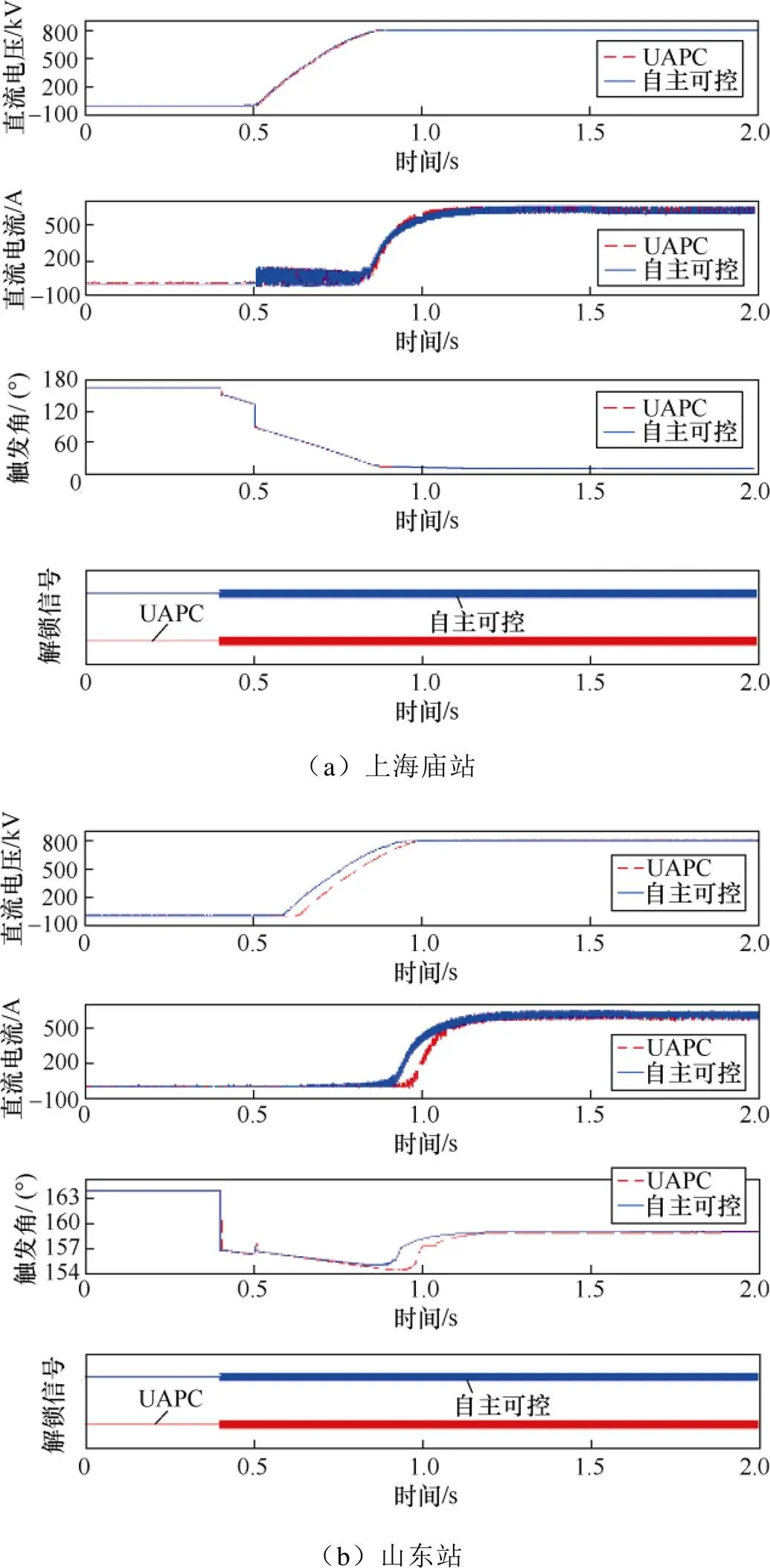
图6 起极过程
3.3 功率阶跃试验
极1单极功率控制,输送功率500MW,功率阶跃400MW,电流和功率响应如图8所示,输送功率迅速增加至900MW。与UAPC上山工程仿真系统相比,自主可控系统的功率阶跃响应速度更快,阶跃性能更好。
3.4 触发脉冲准确度
整流侧触发角的指令值及测量值如图9所示,触发角的测量值跟随指令值,且上下波动幅度最大只有0.05°左右。与UAPC上山工程仿真系统相比,在交流同步电压一致的情况下,自主可控系统触发角测量值波动幅度较小,触发角控制更加精确。
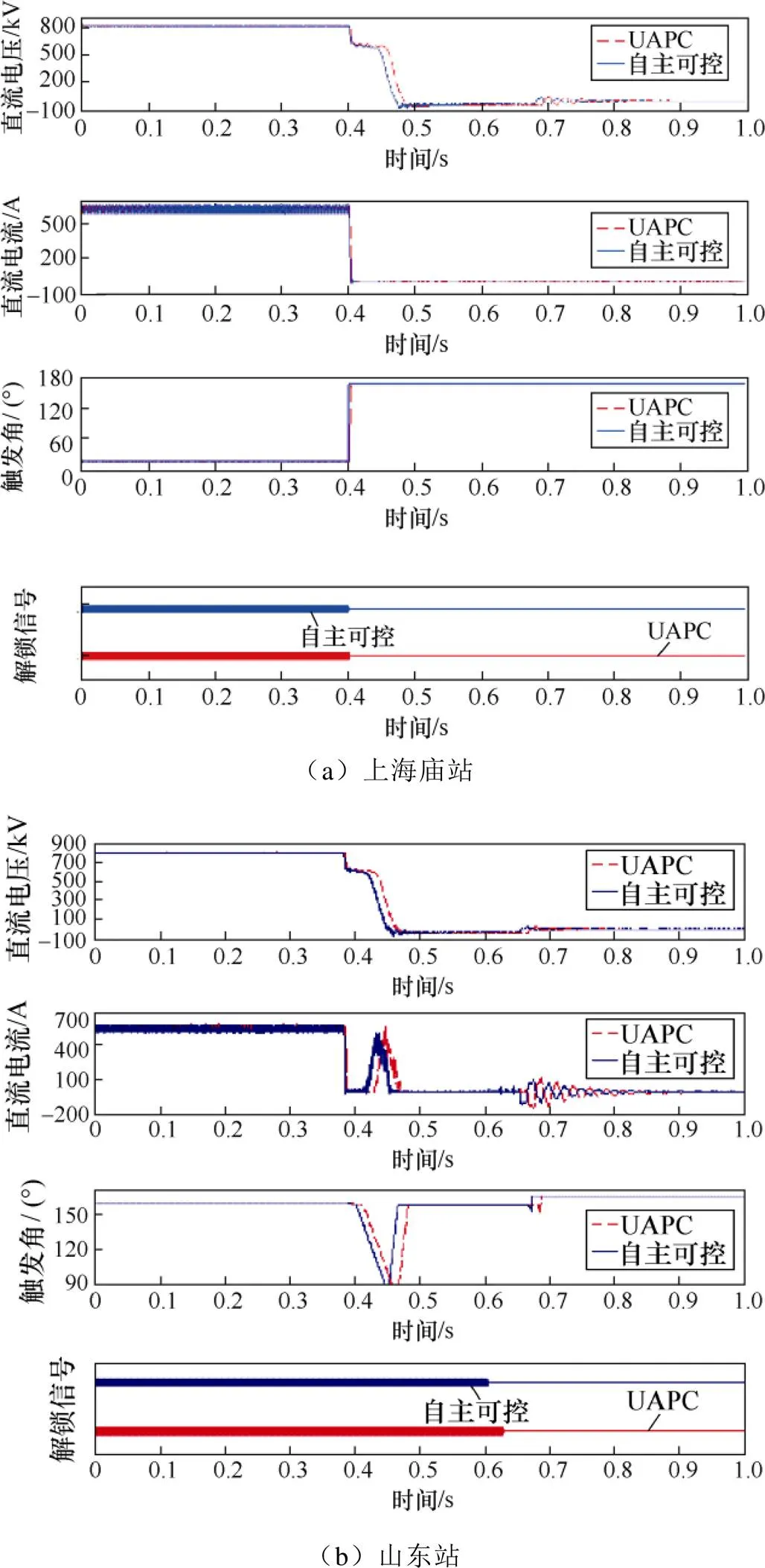
图7 整流站X闭锁
3.5 主机状态异常试验
站2极1极控制主机A套在值班状态,B套在备用状态,模拟站1极1极控制主机A套DSP插件某核运行异常,试验结果如图10所示。从图10可以看出,A套主机检测到运行异常后,退出值班状态,B套主机由备用状态升至值班状态,切换过程主机通信数据正常,直流运行正常,本文设计的主机状态监测系统功能完备。
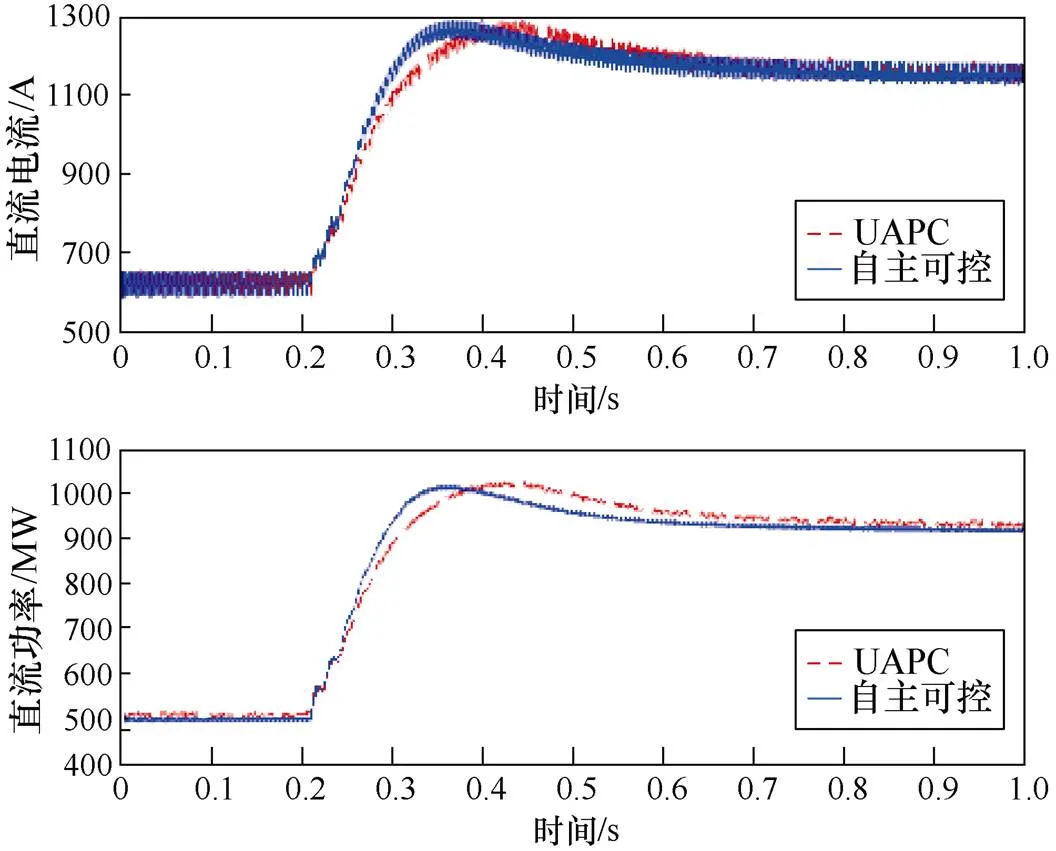
图8 电流和功率阶跃响应
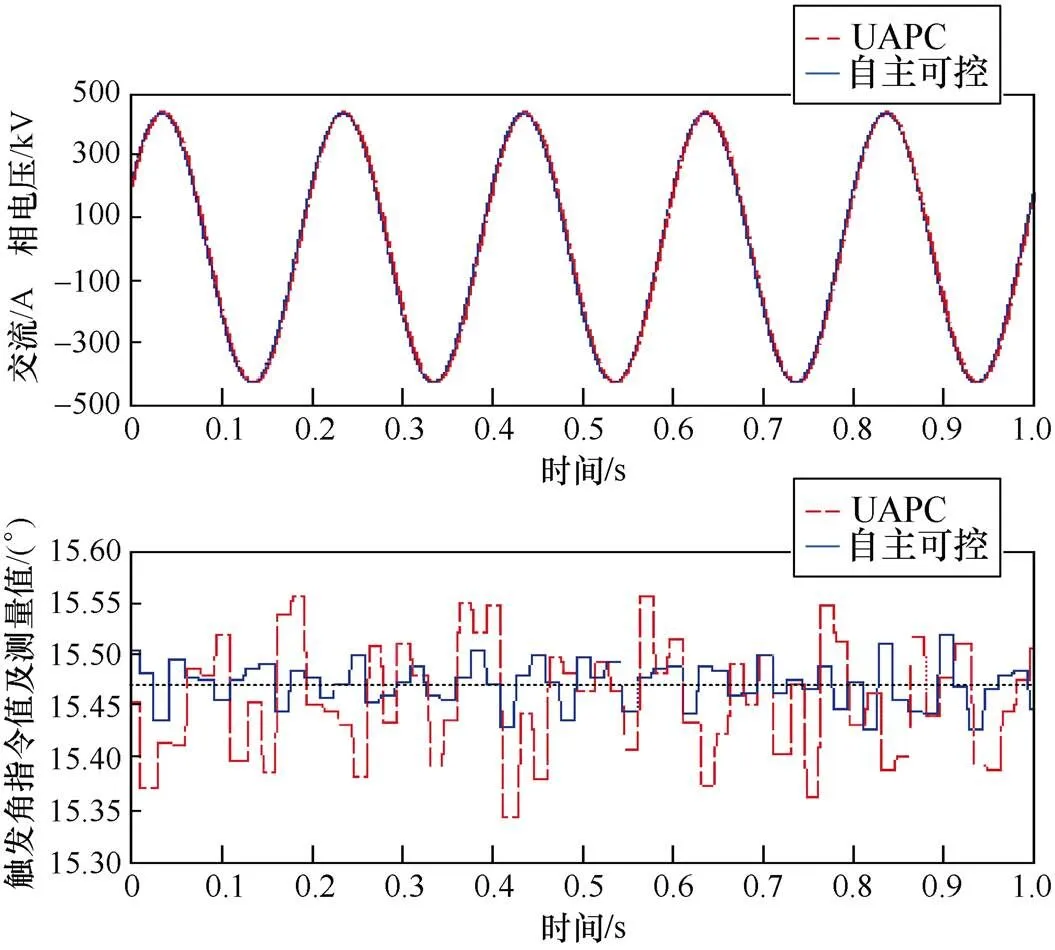
图9 触发脉冲测量
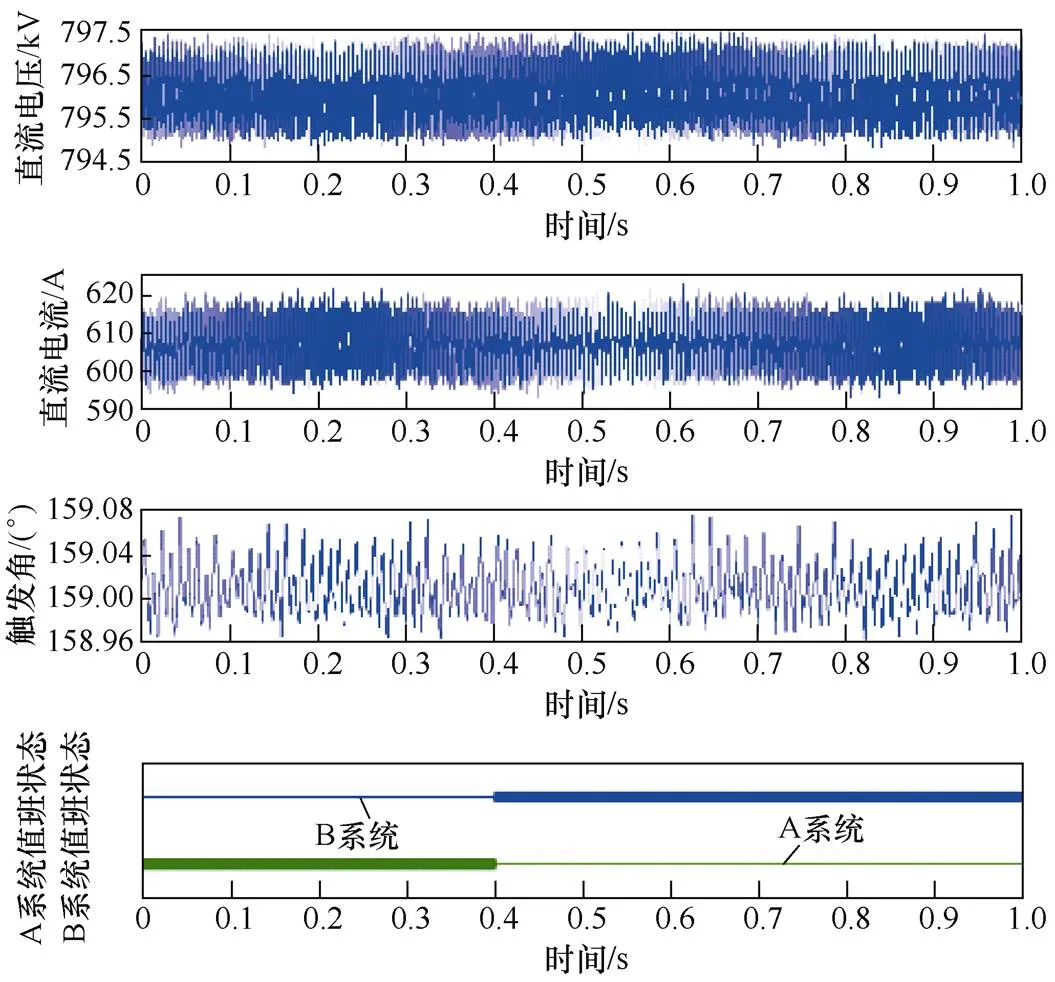
图10 模拟主机运行异常
4 结论
本文设计并研发了基于国产芯片和元器件的自主可控特高压直流控制保护系统,分别介绍了系统的软、硬件平台,并针对特高压直流输电工程进行了工程化的设计,最后在RTDS平台进行大量的工程试验,充分验证了系统的功能和性能。自主可控特高压直流控制保护系统在现有系统软、硬件升级和优化的基础上,总体性能不低于现有系统。
本文研制的自主可控特高压直流控制保护系统对于提高电网的安全性、解决关键领域“卡脖子”问题具有重要工程应用价值。
[1] 刘振亚. 特高压交直流电网[M]. 北京: 中国电力出版社, 2013.
[2] 刘振亚. 全球能源互联网[M]. 北京: 中国电力出版社, 2015.
[3] 张刘春. ±1100kV特高压直流输电线路防雷保护[J]. 电工技术学报, 2018, 33(19): 4611-4617.
[4] 刘泽洪. ±1100kV特高压直流输电工程创新实践[J]. 中国电机工程学报, 2020, 40(23): 7782-7792.
[5] 习贺勋, 汤广福, 刘杰, 等. ±800kV/4750A特高压直流输电换流阀研制[J]. 中国电机工程学报, 2012, 32(24): 15-22.
[6] 李林, 吕彦北, 龚飞, 等. 美丽山特高压直流Ⅱ期工程交流系统故障恢复特性研究[J]. 电气技术, 2020, 21(7): 57-63.
[7] 张浩然, 贾帅锋, 赵冠华, 等. 直流控制保护系统网络安全分析与对策[J]. 电气技术, 2020, 21(1): 110-112, 125.
[8] 张京京, 荀鹏, 冯健飞, 等. 智能电网安全与自主可控的分析与评测[J]. 计算机技术与发展, 2016, 26(5): 79-85.
[9] 南亚希, 展巍, 裴后宣. 自主可控的安全RTU设计与实现[J]. 电力系统保护与控制, 2016, 44(14): 154-159.
[10] 任辉, 姚志强, 邢文红, 等. 基于国产核心芯片的变电站数据通信网关机设计[J]. 电子设计工程, 2021, 29(8): 150-155.
[11] 马威, 姚静波, 常永胜, 等. 国产CPU发展的现状与展望[J]. 集成电路应用, 2019, 36(4): 11-14.
[12] 陈宏君, 周强, 文继锋, 等. 保护控制装置虚拟运行平台设计与实现[J]. 电力工程技术, 2018, 37(1): 113-121.
[13] 谭良良, 陈宏君, 徐睿, 等. UAPC控制保护平台配置软件设计[J]. 工业控制计算机, 2018, 31(4): 74-76.
[14] 张庆武, 潘卫明, 张靖, 等. ±1100kV直流控制保护系统冗余设备故障处理的探讨[J]. 电力系统保护与控制, 2015(21): 148-153.
[15] 范子强, 许朋见, 吴庆范, 等. DPS—5000直流输电控制保护系统设计方案[J]. 电气技术, 2021, 22(5) : 78-84, 88.
[16] 王增平, 刘席洋, 郑博文, 等. 基于电压波形拟合的换相失败快速预测与抑制措施[J]. 电工技术学报, 2020, 35(7) : 1454-1463.
[17] 关红兵, 黄立滨, 周鹏鹏, 等. 基于RTDS的高压直流控制系统锁相环仿真研究[J]. 电力系统保护与控制, 2017, 45(12): 128-132.
[18] 陶瑜. 直流输电控制保护系统分析及应用[M]. 北京: 中国电力出版社, 2015.
Design and development of autonomous and controllable UHVDC control and protection system
SHEN Tianjiao ZHONG Hao WANG Yongping ZHOU Qiang ZOU Qiang
(NR Electric Co., Ltd, Nanjing 211102)
An autonomous and controllable control and protection system is designed and developed for UHVDC project. Firstly, the autonomous and controllable software and hardware platforms of control and protection system are designed. Considering the characteristics of the platform and the requirements of UHVDC transmission system, redundant communication method and reliable system-supervision function are designed. Then, the UHVDC control and protection system is designed on the autonomous and controllable platform, and the experimental prototypes are manufactured. Finally, the system is simulated and tested in RTDS, which is based on a practical UHVDC project. Results validate that the autonomous and controllable control and protection system for UHVDC has complete functions and good performance in application.
ultra-high voltage direct current (UHVDC) transmission; control and protection system; autonomous and controllable; design scheme; real-time digital simulation (RTDS)
2021-08-10
2021-09-22
沈天骄(1993—),男,硕士,工程师,从事直流输电控制保护系统研发工作。
国家电网有限公司科技项目(202155031A)
