水下机器人在深水OBN地震采集中的应用
2022-03-25全海燕汪长辉马力强彭德丽
白 杰,全海燕,汪长辉,马 涛,马力强,彭德丽,张 坤,靳 望
(中国石油集团东方地球物理勘探有限责任公司,河北涿州072751)
海底节点(ocean bottom node,OBN)采集具有灵活性强,布放、回收便捷,可观测多分量、长偏移距及全方位地震数据,提高地震成像质量[1-4],且观测时间长、良好的可重复性等特点,为改善油藏地震监测效果、四维地震创造了有利条件[5-7]。因此,OBN采集技术已成为海上地震数据采集的一种重要方法[8]。深水或复杂区OBN采集方法,通常面临水深变化大、海底环境复杂等挑战,有时最大施工水深有数百米,远超常规OBN地震采集极限。这时利用传统海面投放方法会产生较大点位误差,不能满足地震数据采集对接收点位置精度的要求,而且随着水深的增加,误差会逐渐增大[9],因此引入了水下机器人(remotely operated vehicle,ROV)技术。近年来ROV已被广泛应用于深海管线检测与修复、海洋光缆布设、海洋油气平台的检测与维护、深海科考及军事等领域[10-11],但在地震勘探行业的应用仍处于初级阶段。ROV系统及相应定位产品及技术方面,以欧美国家的产品为主,我国的相关研究和设备制造基础相对薄弱,处于跟随阶段[12-15]。由于动态定位(dynamic positioning,DP)船加ROV的组合普遍价格昂贵、设备及操作专业性强等原因,在OBN地震采集中鲜有应用,少有的案例也大多是通过服务分包的方式进行,目前还未形成适用于地震采集的完备质控作业流程和评价体系,相应技术指标的定量论证及分析不足[16]。
本文研究依托于非洲东部某群岛海域地震采集项目,是一个复杂区OBN的典型案例,通过对ROV在此应用中的各环节剖析及其定量评价,阐明了ROV和地震采集行业质量控制的衔接方法,并为ROV在石油勘探行业的下一步应用提供重要参考。
1 水下机器人系统
由于洋流、海浪、风力和风向等因素的影响,船只在海洋中不能像在陆地一样静止在某个位置并长时间保持不动。而ROV需要相对稳定的“平台”支持,否则会带来较大的安全风险。因此,ROV必须配合DP船使用,缺一不可。
DP船指具有动态定位功能的船舶。船舶通过除主推进器(船尾)之外的若干个可以数控调整推进角度、功率的侧推进器组成。根据船只实时GPS位置、洋流方向和流速、风向及风力等信息,多个推进器协同工作,利用数控方式自动调整推进器的功率、方位等,最终实现将船舶稳定在茫茫大海中的某个点位,并保持不动。
ROV系统装备分为两大部分,分别安装于DP船甲板和船舶驾驶舱,以本次研究所用ROV为例(图1),由ROV操作控制室、ROV吊架、布放回收OBN篮的吊架、绞车和定位控制系统组成。其定位控制系统是由安装于船舷处的超短基线(ultra short base line,USBL)声学换能器探头、驾驶舱顶部的GPS天线及驾驶舱内的定位监控系统组成,同时,水下定位监控、原始数据记录也在DP船驾驶舱内完成。
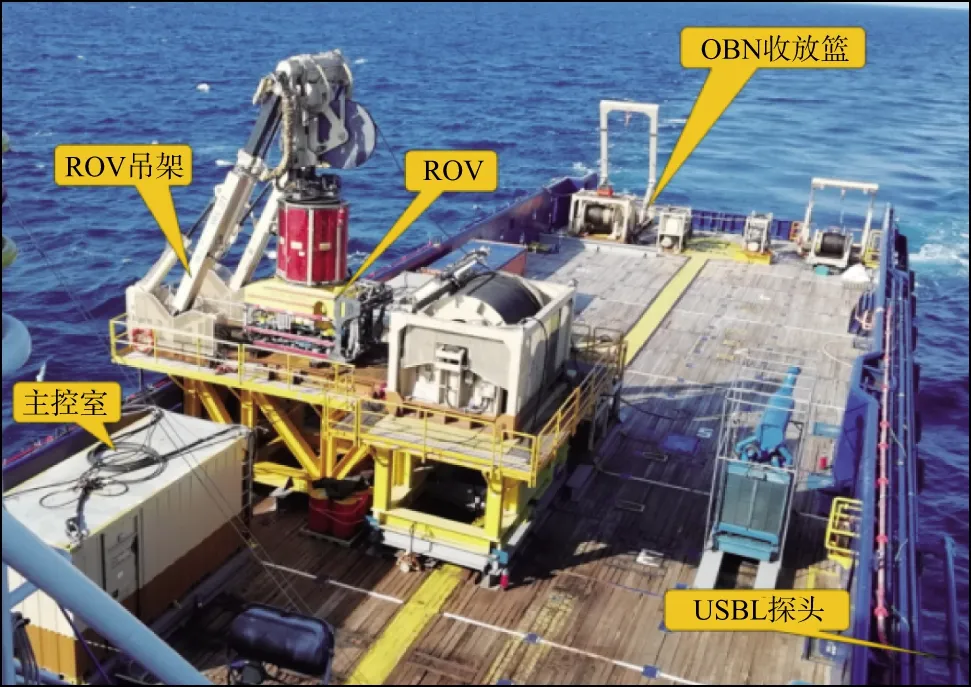
图1 ROV系统布置(位于DP船甲板)
2 深水OBN定位技术
深水定位通过两部分实现:①海面以上的多个GPS探头及精确测量的相对位置;②海面以下利用USBL定位技术。因海面以上的定位与陆上GPS定位无异,下面仅讨论水下部分。ROV可以实时得到位于水下ROV机械臂上的应答器的坐标,即OBN布放坐标。与长基线和短基线定位技术相比,超短基线定位精度略低,但无需布设基站阵列支持,灵活方便,尤其适用于地震勘探等深海矿产和油气资源的调查和开发[17]。USBL水下定位系统主要包含收发器(transceiver)与应答器(transponder),其中收发器的声学换能器(acoustic transducer)安装于船底,应答器则安装于水下目标物,即机械手臂。
图2展示了USBL水下定位工作原理,由安装于船底部的USBL声学换能器发射高频声波,由位于机械臂末端的应答器接收同频声波并返回换能器,定位系统通过对比声波信号彼此的相位差来确定应答器的实时位置,也就是ROV的位置,记录并显示在监控屏幕上。

图2 USBL水下定位原理示意
3 应用实例
非洲东部某区块二维陆上+浅海+深海地震采集是复杂区OBN采集的典型案例。研究区主要由两个珊瑚岛屿及附近群岛组成,海底地表复杂多变,部分区域平均坡度高达14°,测网覆盖区水深变化剧烈,如图3所示。本文研究主要进行如下4项关键技术的研究和应用:①ROV定位系统技术标定;②节点布放回收及点位精度分析;③布放及回收效率分析;④定位数据精度验证。
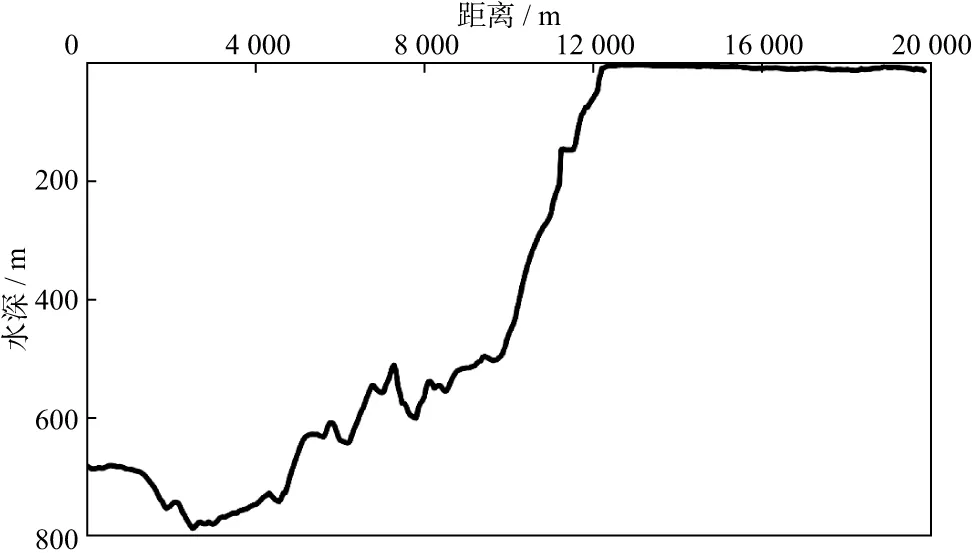
图3 某测线实测水深曲线
3.1 深水定位系统标定
超声波的时间差是由主要参数声波速度计算得到,因此为了获取OBN的精确海底位置,需要准确测得研究区内不同深度的声波速度。另一方面,在深水中实现准确定位,仪器的可靠性验证必不可少。由于在水中很难实现类似陆上稳定基站观测的方式来标定和校准各计量设备,因此需采取动态多次重复观测的方式进行。
3.1.1 声速剖面测量
海洋测量中,声速剖面是声波速度改正的基础。声波速度对测量结果的影响是多方面的,有时对测量结果的影响非常显著。研究区水深达数百米,随着水深的增加,海水的温度、盐度、密度等不断变化,均对声波速度产生影响。因此在系统正式投入使用前,需选取工区最深位置作为测量点,利用高精度声速仪,以固定间隔记录不同深度处的声波速度(采样间隔约1m)。图4为研究区实测声波速度曲线,结果表明,声波速度随水深呈非线性递减趋势,其中,在水深0~80m声波速度变化小,在水深80~300m声波速度变化加大,随后趋于平缓。将该声波速度随水深变化的曲线数值,输入到定位系统中,可获得精度更高的水下定位结果,避免了用固定声波速度进行深度和距离计算而带来的定位误差。
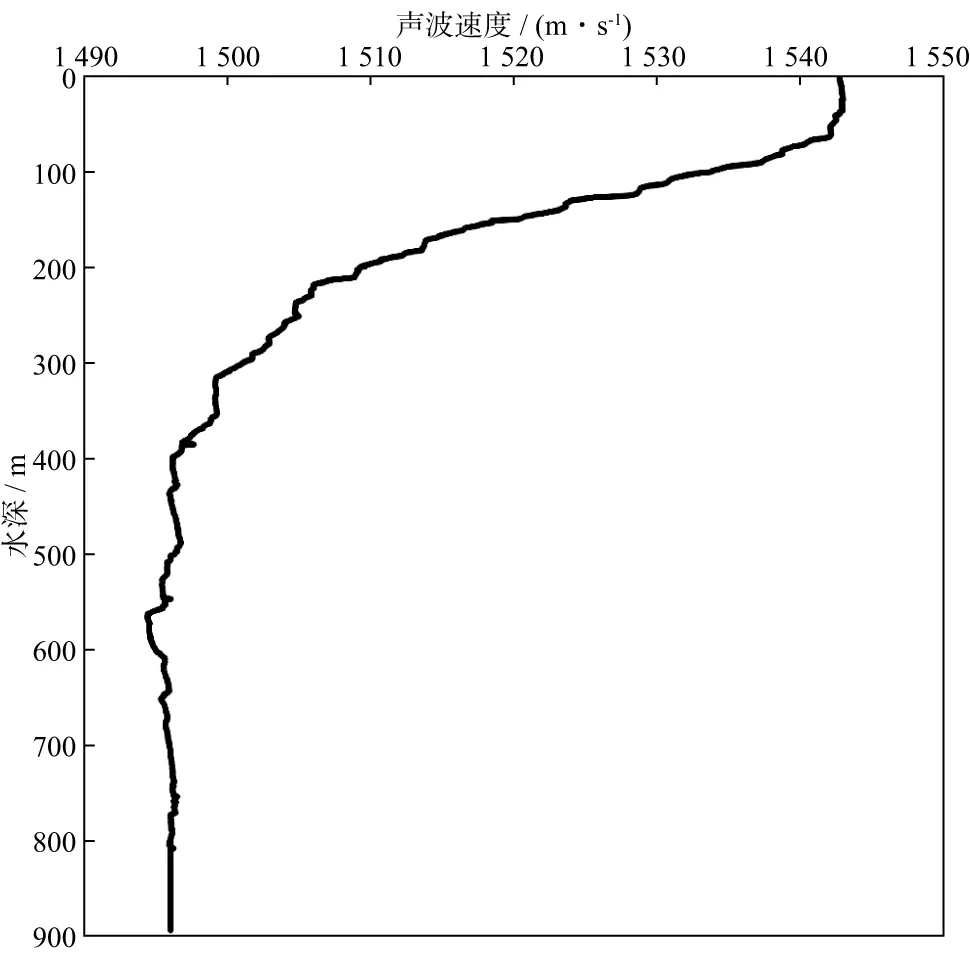
图4 研究区实测声波速度曲线
3.1.2 定位系统校准
将一固定信标布放于海底,通过收发器和应答器之间的超声波获得信标的初始位置;再选取若干个固定间距、均匀分布的点,例如定义初始位置东、南、西、北各200m间距的4个点,分布于4个象限。采用DP船分别定位,对以上4个点进行多次(例如200次)观测,共得到800个信标的定位成果,如图5所示。对这800个信标定位结果剔除异常点后,利用统计原理,得到相应的X、Y、水深、斜角、方位角、船首GPS探头位置等修正值。再将得到的修正值重新输入系统,从而得到精度更高的定位数据。由图5b可以看出,修正后在不同方位测量得到的定位结果精度更高。这一标定方式,类似于陆地测量中的长时静态观测,由于海浪、洋流、风力、船推进器等多种因素制约,该系统中的各主要设备如DP船、ROV、铠装电缆等均无法固定位置,所有记录的数值都是对其瞬时状态的显示,因此统计学标定方法成为这一系统的必选方案。
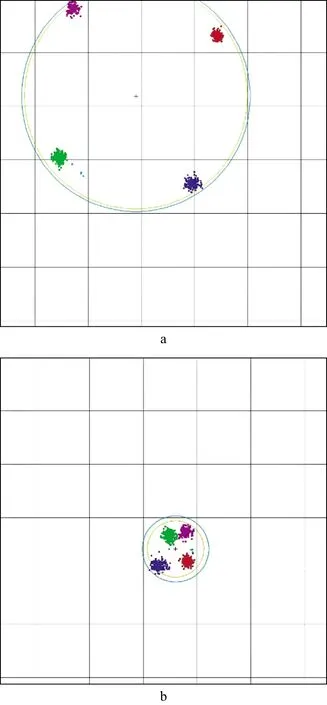
图5 USBL定位校准前(a)、后(b)的结果
3.2 ROV布放回收
3.2.1 方法说明
ROV水下作业过程如图6所示,利用船尾的吊车将装有OBN的投放篮(备注:经过实验和改装,本次采集所用ROV布放回收系统,共两个投放篮,每个投放篮可装载最多32个OBN)放入距离海底5~10m的位置。随后通过船甲板中部的ROV吊车将ROV下放至海底5~10m处,ROV利用自身的小型螺旋桨巡游至投放篮处。ROV主控室通过位于ROV前方的高清摄像头,实时监控水下的布放情况(图7),摄像数据将随控制室录音设备一起存储于系统硬盘,作为定位成果的辅助数据。操作员通过仿生操作杆,遥控位于ROV前方的两个机械手,从投放篮中提取OBN并完成布放;完成后移动至下一个点,以此类推。回收时程序类似,在此不再详细论述。目前行业内的OBN产品大多采用4分量记录,即3个不同方向(GeophoneX,GeophoneY,GeophoneZ)的动圈式检波器加一个水听器(Hydrophone)组成。可以看出,ROV布放的一个主要优势体现在:通过机械手对OBN的精确操作,可将每个OBN的首向(inline orient,heading)对准测线方向,并有效降低OBN的平躺倾角,为多分量地震数据的后续处理提供了便利。
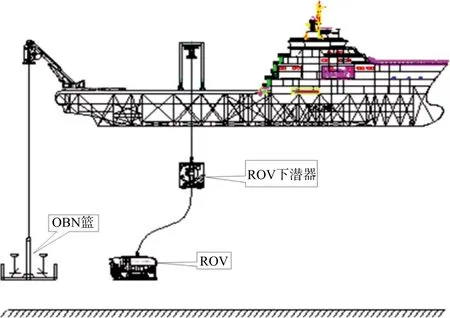
图6 ROV水下作业示意
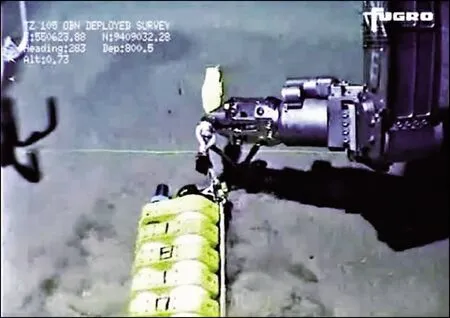
图7 ROV机械手水下作业实时监控画面
3.2.2 定位精度分析
研究区OBN布放按水深划分为浅水部分(0~50m)和深水部分(50~900m)。水深0~50m的浅水部分由施工船以传统海面投放方式完成,水深超过50m的区域由ROV布放和回收。以某二维测线为例,经过声波二次定位后的最终定位成果(水深曲线)和整体点位偏移量统计结果如图8所示。图9为局部测线点位偏移量及水深曲线。图10为点位精度分析结果。

图8 某测线布放点位偏移量及水深曲线
由图9和图10可以看出浅海和深海两种布放方法的OBN点位特征:
1) 采用浅海投放方法布设,各处点位偏移量不固定,总体呈现与水深增减规律相同,即随着水深增大,偏移量增大,反之亦然(图9a);
2) 采用ROV布设,水深变化较浅海剧烈,但布设点位偏移量较小且稳定。点位偏移量与水深无明显相关性(图9b);
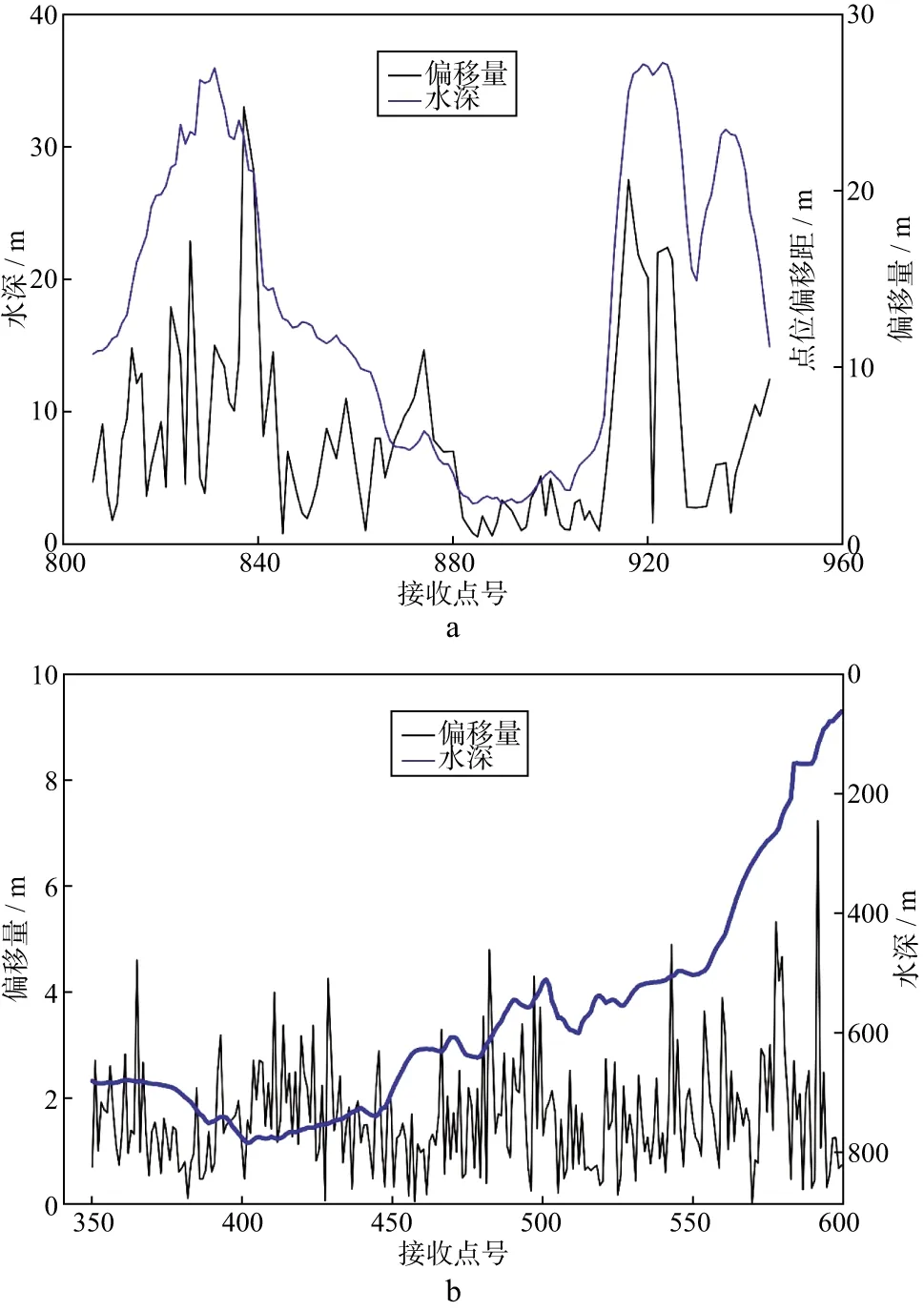
图9 局部测线点位偏移量及水深曲线
3) 浅海OBN平均偏移量为3.77m,最大偏移量为15.87m,方差为5.39;深海OBN平均偏移量为1.66m,最大偏移量为7.23m,方差为1.12(图10)。
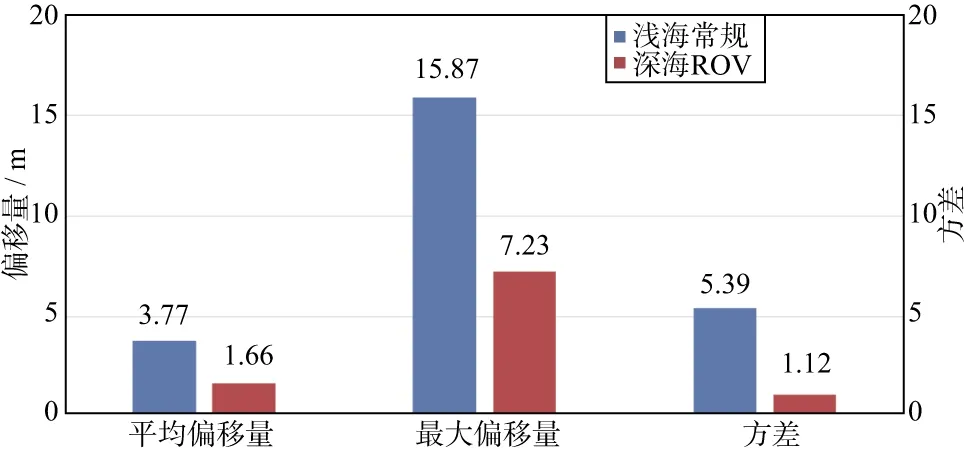
图10 点位精度分析结果
可以看出,浅海投放方式布设的OBN点位受水深和海底地形变化影响较大,这在常规浅海作业中比较常见,很难完全避免;而在点位控制方面,利用ROV布设则不受水深的影响,OBN点位偏移量较小,总体偏移均匀且数值集中,方差小,点位精度能够满足数据采集要求。
3.3 效率分析
本次研究对布放和回收分别进行了定位、记录,获取了OBN布放和回收的两套坐标。为了客观说明ROV系统的效率,选取了一条具有代表性的测线,对不同水深位置的布放和回收效率进行了分段统计分析。图11a统计了每小时内不同水深范围内ROV布放、回收OBN的个数,可以看出,0~200m内由于水深及海底状况变化复杂,影响了ROV布放,导致施工效率较低,测线其它位置坡度相对平缓,海底地形单一,这时布放效率保持在8~9个/h。回收效率总体略高于布放效率,约为10个/h。在不考虑水深或海底状态的前提下,深海ROV布放效率大大低于浅海传统投放方式(图11b),同时考虑到DP船+ROV的价格较为高昂,建议在OBN采集的应用中充分做好规划,综合考虑技术、效率、成本等因素。
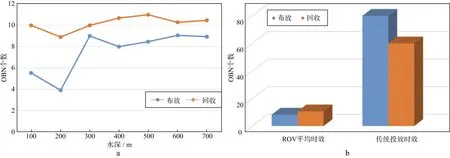
图11 ROV布放回收时效统计(道距为50m)
3.4 初至波二次定位验证
为了再次验证ROV坐标的准确性,采用单炮初至波二次定位技术,对实测深海OBN点位进行了二次验证。选取每炮中某段近偏移距或中偏移距的清晰初至(图12a),利用该段多道初至时间及偏移距离等已知信息,计算得到OBN点位的室内二次定位结果,再计算该二次定位结果与野外实测位置的偏差(图12b),结果表明(表1):超过99%的点位与野外实测坐标误差范围在10m之内,其中71.76%的点位误差小于5m。

图12 初至波二次定位
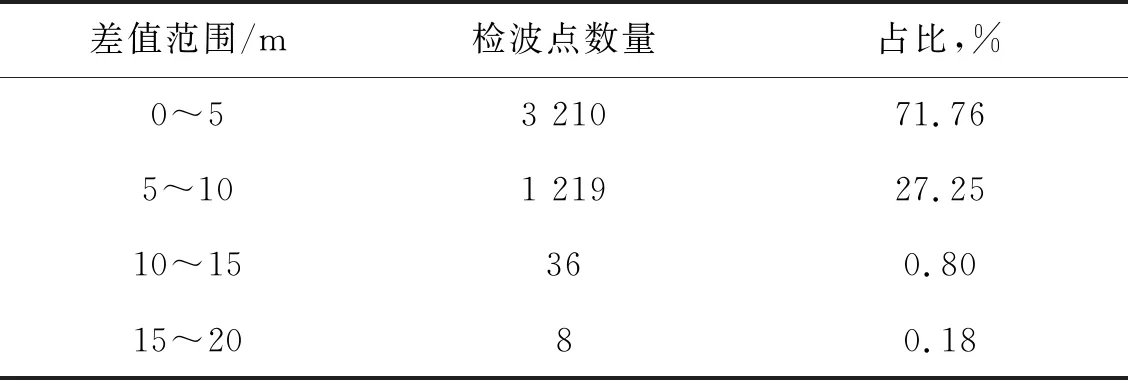
表1 初至波二次定位结果与野外实测位置的偏差统计
4 结论
通过非洲东部某近岛海域OBN采集实例,将ROV技术与物探行业相关的部分进行了系统研究和详细分析论证,主要包括定位系统技术标定、节点布放回收及点位精度、布放及回收效率、定位数据验证等方面。本文的方法技术和定量分析结果对于ROV在物探行业的后续应用具有重要参考价值。同时应该看到,虽然ROV技术具有点位布放精度高、布放手段丰富等优点,但在今后应用中应充分考虑ROV的低效率和高成本特点,在技术经济一体化评估时综合考虑,做出科学决策。