基于PLC 的矿井架空乘人装置运行控制系统应用研究
2022-03-24张帅
张 帅
(山西兰花科创玉溪煤矿有限责任公司, 山西 晋城 048000)
引言
架空乘人装置是矿井劳动力输送的关键交通工具,对矿井恶劣的作业环境以及复杂的地下通道条件具有较强的适应性,整体运输能力很强,有效地提高了矿井的开采效率并降低了一线工人的作业强度。为了提高架空乘人装置工作的可靠性以及电气自动化管理水平,有必要对其自动控制系统进行深入研究[1]。因为架空乘人装置在运行过程中存在一定的安全隐患,比如牵引钢丝绳速度过快,甚至出现了断绳的情况,严重时可造成矿工意外身亡等事故。自动控制系统的研究是保证钢丝绳的运行速度在合理的范围内,同时基于PLC 系统对矿工在上下车时能够实现自动或者停靠提升矿工乘坐的安全性与舒适性,达到实现无人值守多重保护远程监控等功能。研究成果为矿井设备的电气自动化设计提供了依据。
1 架空乘人装置的工程技术特点
1.1 技术特性
FLP 型架空乘人装置常应用于在煤矿井下运输物料和人员。其升降椅运输系统分为RJHY 活动椅系列、RJKY 可拆卸椅系列、RJY 固定椅系列。RJHY和RJKY 适用于0~25°坡度的巷道、RJY 为0~35°。具备以下特点[2]:
1)驱动部分可通过变频、磁阻调节变频或软启动控制形式,实现不同的速度转换。
2)电控系统采用PLC 实现保护控制系统速度,沿途拉急停,矿工过线、重块限位等安全保护,语音报警声光通信和无人值守等诸多特点。
3)具有高速制动和末端安全制动,两种制动均故障安全。电源组为单回路或双回路结构。整个系统安全可靠。
4)固定式电缆座采用先进的预紧结构,不会松动或滑。
5)高速电缆夹持装置整体铸造安全,制作精美。滑动部分采用SKF 免维护轴承,可靠性高,使用寿命长。
6)椅子为专用减震弹簧座或软座泡沫座或双向旅行椅,结构合理,坐感舒适。
7)滑轮直径大,钢体穿软衬,减少绳索耐磨、寿命长,乘员乘坐平稳舒适。
8)轮子和挂管设计合理,更换轮线和轴承的润滑很容易。精度要求较低,安装可以在可变条件下进行。
9)联轴器、吊管、轴承轴经高级防腐处理技术,电缆固定装置、椅子、轮子是镀锌或喷塑完成,整套设备耐腐蚀。
1.2 工程参数
架空乘人装置的运行速度可以在0~3 m/s 之间变化[3],悬挂在运输段的弯道站便于弯道的通过。该系统通过了DGMS 的批准,具有超速限制、液压制动系统、电话通信系统、紧急拉线系统和视听报警系统等多项安全功能。工程参数如下表所示:
2 架空乘人装置控制系统的软硬件设计
2.1 硬件组成
2.1.1 制动器
控制系统的制动器是核心设备,如下页图1 所示,通过自动化控制的制动器比原始的手动操作动器更有安全性。目前的制动器存在一定的致命缺陷,因为当整个矿井断电时,就会无法实现自动控制。因此需要将控制系统的UPS 电源进行设计,当整体矿井交流电停止供电时,能够满足一定时间内的直流电供应,确保整个制动系统供电的正常进行[4]。

图1 制动器结构示意图
2.1.2 控制电路
控制系统的电路由接触器、电阻、二极管组成,通过127 V 的交流电压[5],同时驱动两组电动机,通过绕组的转动,不断地调节电阻的数值,实现电流大小的控制,从而使得制动器的工作压力产生变化。原始的电气原理图如图2 所示,可以看出原始电路图中设置有手动按钮,通过对开关以及电容的控制才能实现各电路的交替运行,存在不确定因素。
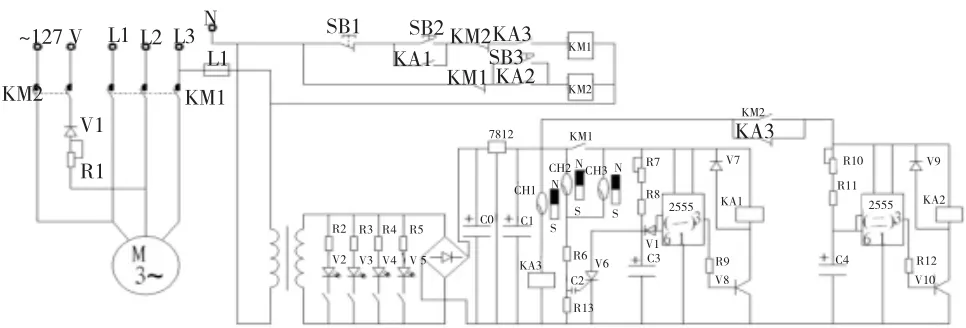
图2 控制系统的电路示意图
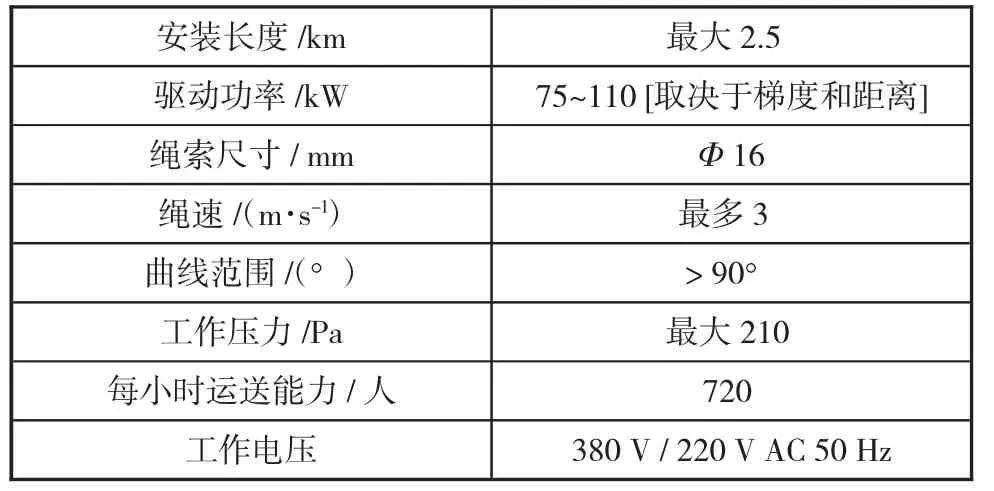
表1 架空乘人装置工程参数表
2.2 软件设计
为了使软件系统能够与PLC 微处理器更好地进行匹配,通过PLC 控制系统的输入模块、CPU 模块、输出模块进行软件的设计,采用S7-200 和STEP7-Micro/WIN 编程软件[6]对控制人员的窗口组件进行设计,实现人机交互的可视化显示。硬件与软件之间通过RS232/PPI 多主站的通信协议采用光纤电缆直接连接,比原始的MPI 通讯电缆的稳定性和保密性更高。如图3 所示为上位机软件系统功能的框架图。

图3 上位机软件系统功能的框架图
2.3 基于PLC 的控制系统设计
根据原始的软硬件条件,对PLC 控制系统的设计方案进行整体的设计,系统控制组成图如图4所示。
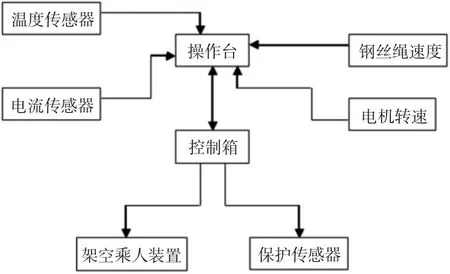
图4 系统组成示意图
为了控制系统实现架空乘人装置的控制功能,安装速度传感器、位移传感器、接近传感器等高灵敏度传感器,实现自动检修、自动启动、自动停止制动、急停和故障复位等关键指令功能,同时也不完全的去除手动指令,还可通过手动操作完成主电机开、主电机停等紧急情况下的手动操作功能。
在进行自动控制过程中,为了提高控制的效率,通常会选择就近控制原则。当起车指令发生后,系统将通过声光预告对矿工进行提示,同时延迟5 s 发出工作指令,同时制动电机打开以及工作闸打开,随后将延迟3 s 启动变频主电机。整个起车过程耗时10 s,直到起车指令的完成。
3 架空乘人装置控制系统的应用实测
本文以某煤矿矿井通道的架空乘人装置集群化无人操作为例,具体实现流程如下页图5 所示。根据架空乘人装置启动信号及语音提示后设备自动开启,入井人员在乘坐期间若遇到停车情况则判断停车原因,若是保护动作停车,待保护自动恢复或者人工恢复后设备继续运行,整个过程结束;若是故障问题,如检修、设备故障、程序等问题,判断是否需要远程故障诊断,如需要则进入下页图5 所示流程直至故障问题解决。另外,在井下各机头,机尾、上下人站点及巷道关键地点安装有视频监控装置,实时监控整个集群系统的设备运行和人员乘坐安全状况,直至把人员安全送至目的地。
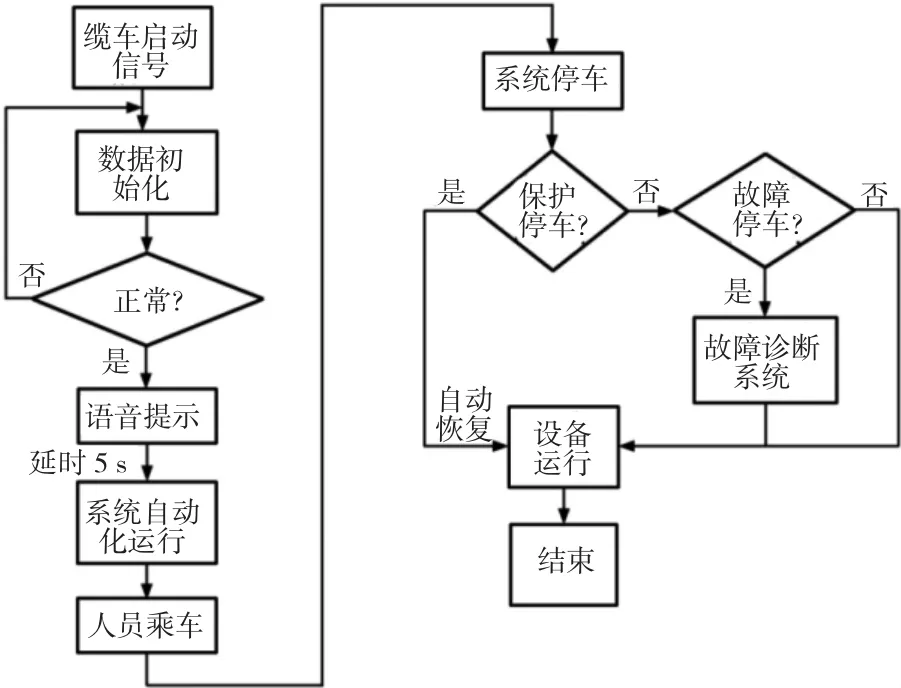
图5 架空乘人装置集群无人操作流程图
4 结语
根据目前架空乘人装置电控系统所出现的问题,重新对其控制系统进行了优化设计。根据其整体的机械构造以及电路布置条件,结合矿井的作业环境,采用PLC 为核心控制器设计出了架空乘人装置的控制系统。该系统实现了运输线路关键点位的自动启停以及急停保护等重要的功能,实现了无人值守运行保护远程监控等多种功能。该控制系统的提出,极大地提升了矿工乘坐架空乘人装置的舒适性,突破了井下矿井恶劣环境巷道的空间限制。对于煤矿企业来说,提高了生产效率和本质安全化的管理水平,达到了快速运输矿工的重要目的。