基于LabVIEW的塔机起重臂摆动检测及分析*
2022-03-24许名熠石芳何首文
许名熠,石芳,何首文
(1.湖南安全技术职业学院防灾与救援学院,湖南 长沙 410151;2.中联重科股份有限公司,湖南 长沙 410013)
塔式起重机由于作业半径大、起重量大、效率高等优点,被广泛应用于各类建筑施工中[1],其主要机构由塔身、起重臂、平衡臂、塔头、顶升套架等组成。在施工作业中,主要由起升、回转、变幅机构动作来完成吊重转运,其中回转机构的功能主要是驱动塔身上部的起重臂和平衡臂做水平的回转运动。由于塔式起重机的起重臂一般比较长,所以起重臂的运动控制具有大惯性特点,同时在运动过程中受风阻力、塔身应力等因素的干扰影响,是一个非常复杂的非线性控制系统[2]。
起重臂平稳运行对现场作业的效率影响很大,所以司机在操作过程中,对起重臂回转运动的性能非常关注。回转启动时的响应和切换档位时的摆动决定了司机吊重重物的就位精度和效率[3]。本文基于NI数据采集模块和LabVIEW数据采集软件,利用DAQ设计助手对塔机回转运动时臂尖加速度进行检测,并分析作业过程中的回转摆动情况。
1 基于CompactDAQ的数据采集系统设计
系统采用cDAQ-9188机箱配置模拟量数据采集模块采集加速度传感器的信号。DAQ-9188机箱是NI公司专为小型分布式传感器测量系统设计的CompactDAQ以太网机箱。该机箱可以扩展C系列模块与外部主机之间的定时、同步和数据传输。
C系列电压输入模块NI9201为8通道的高性能监测模块,采样率可达500kS/s,电压范围为±10V,模拟输入分辨率12bits,并提供了可编程的输入范围。NI9201模块具有高达100V的过压保护,保证了良好的安全性和抗扰性,CompactDAQ数据采集硬件图如图1所示。
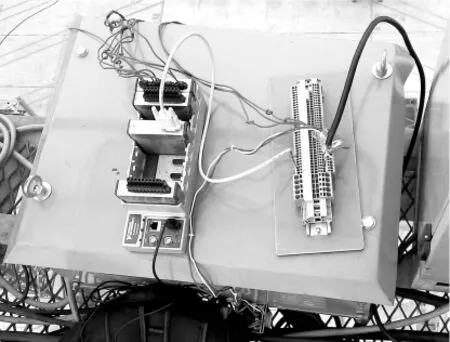
图1 CompactDAQ数据采集硬件图
测量臂尖运行情况的加速度传感器采用PCB公司的3713B1110G,精度±5%(200mV/g),量程±10g pk(±98.1m/s2pk),非线性度≤1%。加速度传感器安装在臂尖位置(塔机型号为TC6517-10),PCB加速度传感器现场安装图如图2所示。

图2 PCB加速度传感器现场安装图
2 LabVIEW数据采集程序设计
LabVIEW 程序称为虚拟仪器程序,简称 VI[4]。数据采集程序有前面板(如图3所示)和程序框图(如图4所示)两个界面。前面板就是图形化用户界面,框图程序用图形化编程语言编写。
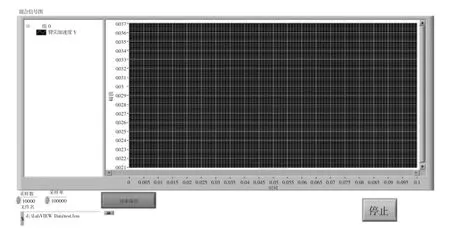
图3 数据采集程序前面板
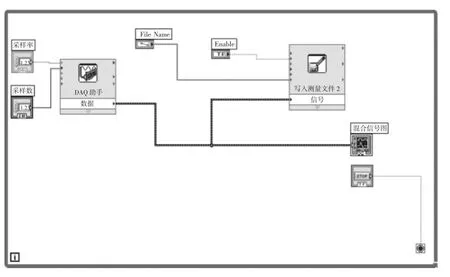
图4 数据采集程序框图
加速度传感器的信号采集通过DAQ助手进行配置[5],DAQ助手是数据采集功能函数的有机集合的图形化界面,可以方便地进行通道选择、信号范围输入、采集模式配置、触发以及定时选择等(见图5),将电压输入模块NI9201在线读取之后,可以方便地选择加速度传感器信号的输入通道,并根据传感器的信号类型,选择为-10V~10V的电压输入范围。
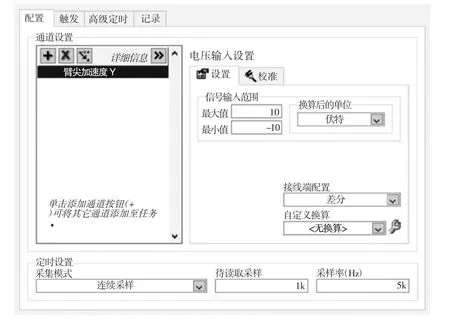
图5 DAQ助手配置界面
采样率及采样数通过设置窗口可以实时更改,方便现场测试的需要。通过“写入测量文件”控件将采集到的传感器数据保存到本地PC机的设定路径。“混合信号图”可以将采集到的数据进行实时显示,方便测量时的数据监视。并设计数据采集程序的启动/停止按钮,在测试时对数据采集进行控制。
3 读取程序设计及数据分析
系统采样率在1kHz左右,采样时间在60秒左右,数据采集量会比较大,LabVIEW软件的数据采集之后是以TDMS文件格式保存在PC机存储器。要对数据进行分析,需要设计数据读取以及分析处理软件。
在LabVIEW框图程序界面调用“读取测量文件”控件可以将TDMS文件格式数据导入,通过滤波后在波形图表上显示,读取程序框图如图6所示。

图6 读取程序框图
数据的滤波处理采用低通滤波的方式,并满足Nyquist(奈奎斯特)第一准则。奈奎斯特第一准则规定了在有限带宽内同步数据传输而不产生符号间串扰(ISI)的条件,也规定了一系列无ISI的脉冲波形选择方法和一系列滤波器的设计方法。其传输角频率(也称奈奎斯特频率)受到如下限制:

滤波器配置完成后,就可以对数据进行导入显示及分析,型号为3713B1110G的加速度传感器可以测试X,Y,Z轴三个方向的量(加速度传感器三轴方向见图7),根据塔式起重机起重臂回转运动的方向,需要分析的是臂尖Y轴的数据,Y轴方向的加速度值反应了起重臂的臂尖在回转运动的抖动情况,从而观察回转运动的响应及稳定性。
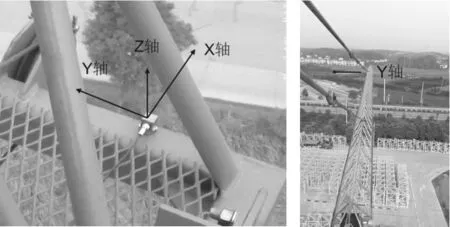
图7 加速度传感器三轴方向
塔式起重机回转机构在三种操作方式(见图8、图9和图10)下臂尖加速度传感器Y轴的数据如表1所示。
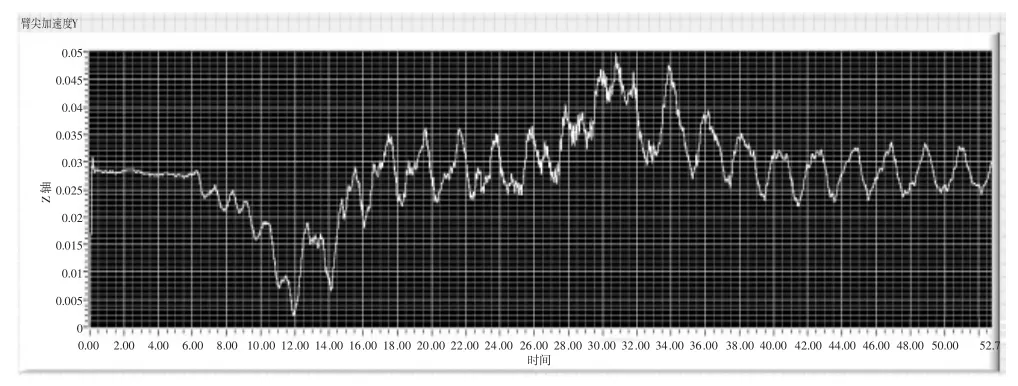
图8 回转向右1档到5档顺序升降(X轴为s,Y轴为V)
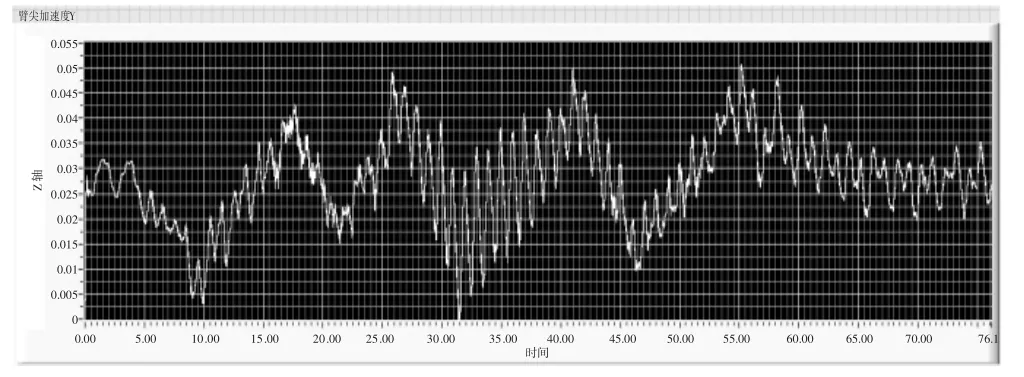
图9 回转向右1档到4档多次切换(X轴为s,Y轴为V)

图10 回转向右1档多次点动(X轴为s,Y轴为V)
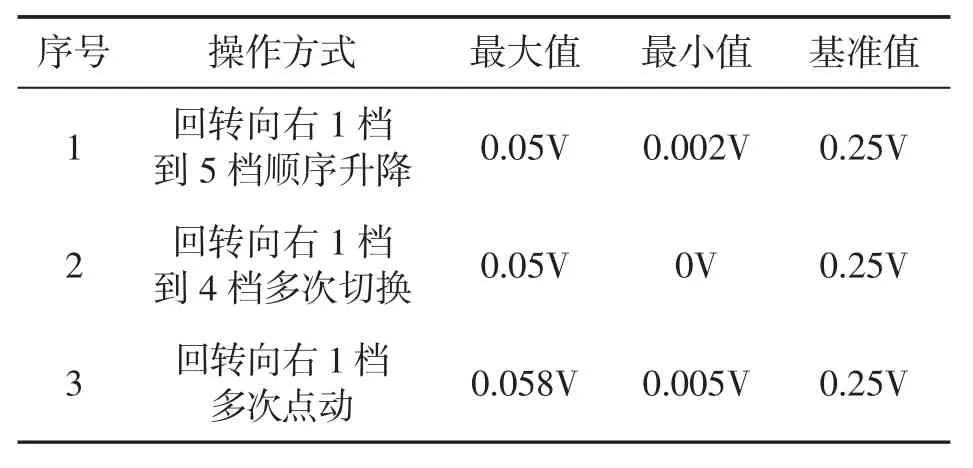
表1 不同操作方式下Y轴的数据
根据加速度传感器(3713B1110G)的量程及DAQ助手的电压输入范围以及对基准值的修正,所对应的加速度a值如表2所示。

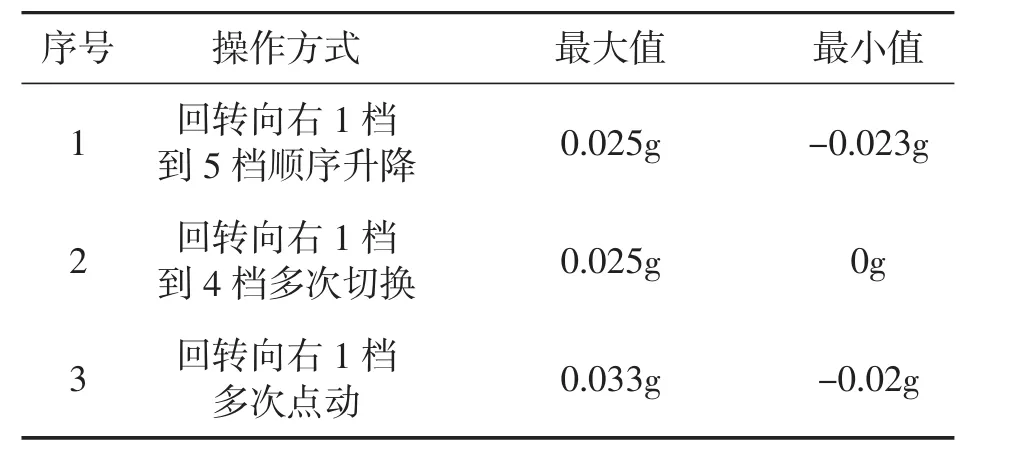
表2 Y轴的加速度a值
结合各波形图及表2可以看出,回转在启动运行时会产生一定的超调以及振荡,当档位稳定并匀速运行时加速度趋于0,当多次切换时加速度波动明显,振荡加剧,能够真实反应塔式起重机在回转动作时的运行情况。
4 结论
本文在CompactDAQ数据采集及加速度传感器的硬件基础上,通过设计LabVIEW数据采集及读取程序,在塔式起重机上进行了起重臂臂尖回转摆动加速度的数据采集,并分析了在回转机构不同操作模式下的加速度曲线及变化情况,设计了一种回转机构性能验证的方法,为后续塔式起重机回转机构控制优化及性能改善研究奠定了基础。
