基于可调谐激光器的光纤法珀振动传感器解调技术
2022-03-24李佳明孔市委任乾钰李加顺贾平岗
李佳明, 孔市委, 任乾钰, 钱 江, 李加顺, 贾平岗
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
非本征型法布里-珀罗干涉仪(Extrinsic Fabry-Perot Interferometric,EFPI)具有体积小、灵敏度高、抗电磁干扰等优点,可以对压力、振动和位移等物理量进行测量[1-2]。EFPI传感器是光纤法珀传感器中应用较为广泛的一种[3],具有制作工艺简单、稳定性好等优势,广泛应用于航空航天、能源勘探等领域。当外界物理量作用到EFPI传感器时,EFPI传感器的腔长将会发生变化,从而导致干涉光的强度或相位发生变化。光纤法珀传感器的信号解调是光纤法珀传感系统中至关重要的部分,解调方法将直接影响整个光纤法珀传感测量系统的解调精度和速度[4]。当前主要的解调方法有强度解调法和相位解调法。强度解调法是通过光纤法珀传感器腔长变化引起的干涉光强度变化,进而对被测物理量进行测量,是较早使用的一种解调方法[5],强度解调具有解调原理简单、系统易搭建、响应速度快等优点,但容易受到光源强度和波长波动等因素的影响,从而引入测量误差,且利用强度解调,传感器腔长变化范围必须严格控制在±λ/8之内,这将导致传感器的测量范围较小,同时对光源要求高[6-7]。相位解调是目前解调系统中最为常见的一种解调方法,具有解调精度高、动态测量范围大、几乎不受光源扰动的影响等优点,但其解调速度慢[8]。1991年,Murphy等[9]提出了双波长正交相位解调的方案,该方案在强度解调的基础上,利用两个正交的单色光源和对相位进行实时补偿的方式解调EFPI传感器的腔长,实现了大范围动态解调,同时保持了强度解调速度快的特点。传统的双波长正交相位解调是通过两支单色激光器或者宽带光源配合可调谐滤波器获得两束相位正交的单色光,同时使用两个光电探测器接收EFPI传感器的干涉信号并转化为电信号,这将会造成两条光路之间的光功率不平衡[10-11],增加了测试系统的不稳定性。为了解决光功率不平衡的问题,研究了一种利用单支可调谐激光器实现双波长正交相位解调的方案。调制光栅Y分支可调谐激光器具有波长调谐范围宽、波长切换速度快、稳定性好等特点,适合于此解调方案。通过可调谐激光器宽范围的线性扫描,获得EFPI传感器的干涉光谱,利用条纹计数法[12]可计算出EFPI传感器的初始腔长、两束相位正交光的波长以及直流分量。两正交光的波长在同一光路中以一定的频率切换,同时采集两束光的干涉信号,利用反正切的原理对EFPI传感器的腔长进行解调。利用基于MG-Y激光器的双波长解调法既可以实现对振动传感器的大范围快速解调,也因只利用了一条光路的切换避免了光功率不平衡的问题。解调速度可达40 kHz,可测得的振动范围为0~20 kHz,本文所选用的振动传感器的可测振动频率为100 Hz~2.5 kHz。
1 原理介绍
1.1 可调谐激光器调谐原理
可调谐激光器是一种电子调谐器件,可以实现宽范围的波长调谐。MG-Y激光器结构如图1(a)所示,主要包含左右光栅区、多模干涉耦合器(MMI)、相位区、增益区和半导体光放大器(SOA)。增益区和半导体光放大器主要控制激光器输出的光功率。左右光栅区和相位区控制激光器的输出波长。通过改变左右光栅区和相位区的电流,引起半导体材料自由载流子浓度的改变,从而改变半导体材料的有效折射率。左右光栅区的采样周期存在一定差异,产生两个不同梳状的反射谱,利用左右光栅反射谱的游标效应,耦合叠加后输出特定的波长,如图1(b)所示。FPGA通过控制左右光栅区和相位区输入电流的大小来控制激光器输出不同的波长。
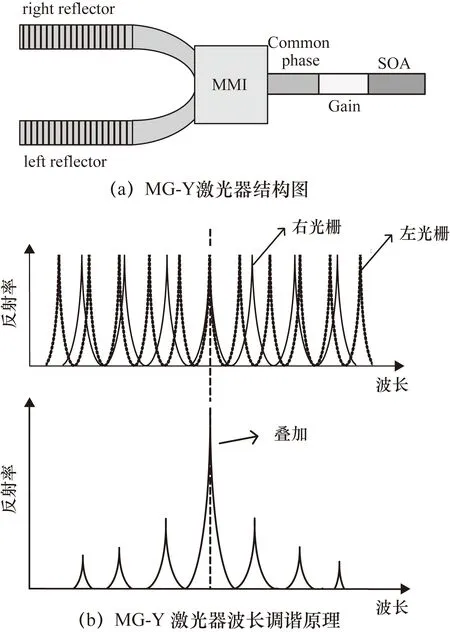
图1 MG-Y激光器
1.2 传感器原理
EFPI传感器结构如图2所示,由玻璃管和光纤焊接而成,光纤的两个端面作为反射面。当光沿着光纤纤芯传播到光纤端面时,在光纤端面将会发生反射和透射,透射出去的光遇到另一个光纤端面也会发生反射和透射。在光纤的两个端面多次发生反射和透射,最后反射回光纤的光将会产生多光束干涉。干涉光的相位随着法珀(F-P)腔腔长的变化而改变。将传感器基座安装在振动台上,振动台产生竖直方向的加速度,引起玻璃片发生形变,从而导致F-P腔的腔长发生变化[13]。

图2 EFPI传感器结构示意图
1.3 双波长解调原理
基于可调谐激光器的双波长正交相位解调的原理如图3所示,可调谐激光器作为光源,FPGA控制可调谐激光器的波长切换,可调谐激光器发射出的两束光,经过1×2光纤耦合器传入EFPI传感器,EFPI传感器反射回的光信号由光电探测器接收并转换为电信号,光电探测器输出的模拟信号通过数据采集模块进行采集,最后由计算机对采集的信号进行处理。光电探测器输出的电压与输入的干涉光强成比例,利用两束单色光的相位差与干涉光强的关系,对EFPI传感器的腔长进行解调,从而探测被测物理量。
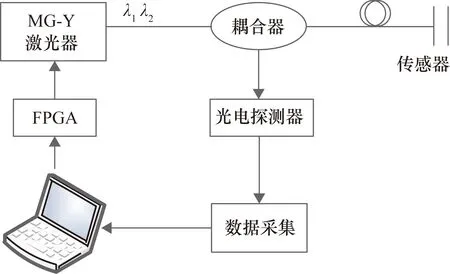
图3 EFPI传感器解调系统示意图
激光器发射出两束不同波长的单色光,经过光纤耦合器入射到F-P腔,在F-P腔的两个端面发生反射,反射回的干涉光由光电探测器接收转换为电压信号,每一个波长产生的相位可表示为
(1)
式中:n为F-P腔腔隙介质的折射率,由于F-P腔内的介质是空气,所以n≈1;L为传感器的腔长;λi为激光器的输出波长。由于光纤端面的反射率较低(约为0.04),EFPI传感器可以看作是一种低精细度的双光束干涉仪,干涉光的强度I可近似表示为
(2)
式中:A为干涉谱的直流分量,其值的大小取决于激光器的功率以及光电探测器的增益;B为干涉谱的振幅;φ0为干涉信号的初始相位。所以两束光λ1、λ2的干涉光强度分别为
(3)
(4)
双波长正交相位解调的关键在于两束光相位正交,根据式(1)可计算出两束光的相位差为
(5)
此时,默认λ1的波长值小于λ2,式(5)中m=0,1,2,3,…。EFPI传感器相位解调精度与两束光波长的选择有关。如果两束光的相位差与π/2相差较大,会造成解调结果线性度差,所以m的取值应尽可能地小。当m=0时,双波长正交信号受腔长影响最小,所以两束光的波长差Δλ可表示为
(6)
同时利用此方法解调需要消除直流分量的影响,一般情况下,通过直接测量直流分量作为固定参数[8]。在计算出初始腔长的情况下,可以通过将其中一波长设置为定值λ1,根据式(5)或式(6)计算出另一波长λ2,使得满足m=0。由于两束光λ1、λ2存在正交的相位差,式(4)可表示为
(7)
利用反正切的原理,联立式(3)和式(7),干涉光的相位可表示为
(8)
式中:φ1=4nπL/λ1,当外界物理量(压力、振动、应变等)使传感器腔长发生变化时,导致相位产生Δφ1的变化量。根据式(1),相位差Δφ1与腔长的变化量ΔL之间的关系可表示为
(9)
由于式(8)中arctan函数的取值在±π/2范围内,要实现对腔长大变化范围的解调,需要对相位进行实时、连续的监测,因为此时激光扫描的频率远高于振动传感器频率,所以m的变化范围为-1~1,一般来说,有两个跃变点,从负无穷到正无穷,或从正无穷到负无穷,因此若发生相位的跳变,就从这两种情况判断。需要通过加减π对相位进行补偿。利用可调谐激光器宽范围的线性扫描,获取EFPI传感器的干涉光谱。通过条纹计数法可计算出EFPI传感器的初始腔长L。根据式(1)、式(2),不同波长的光束沿着光纤传输射入法珀腔时,会产生不同的相位,从而输出不同强度的干涉谱。只有当干涉谱的相位大于2π时,直流分量A才能由光电探测器接收转化为电信号直接测量。利用可调谐激光器以20 pm 的间隔进行宽范围的线性扫描。测量干涉谱的最小峰值(Imin)和最大峰值(Imax),两者之和的一半((Imin+Imax)/2)即为直流分量A的值。外界物理量造成的腔长变化ΔL和Δφ1之间存在着式(9)的关系,可通过Δφ1计算出外界物理量的变化。
2 仿真分析
为了验证算法原理的可行性,对双波长正交相位解调进行动态仿真。假设初始腔长为200 μm,传感器腔长L以300 nm的幅度,10 kHz的频率正弦变化,其余参数如表1所示。
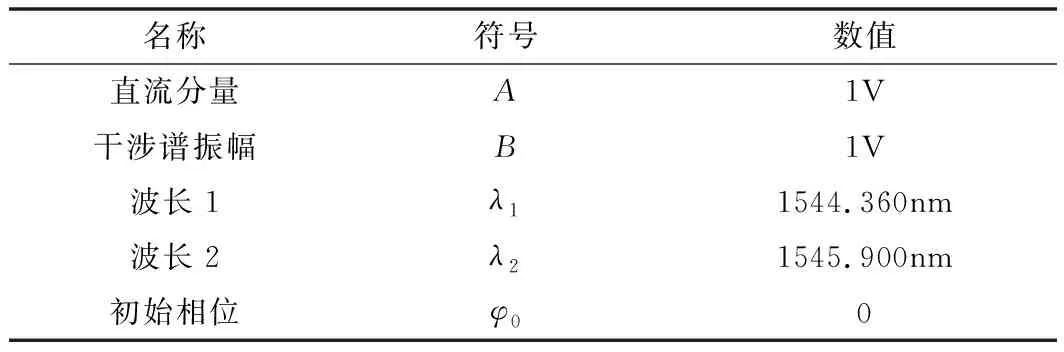
表1 仿真参数的设置
根据式(2)可知,当波长固定时,随着EFPI传感器腔长的变化,干涉信号也会发生相应的改变。两束光随腔长变化的干涉信号如图4(a)所示,从图4(a)中可以看出,EFPI传感器的腔长变化超过一定的范围将会导致波形失真。消除直流分量的影响,两信号相除反正切的结果如图4(b)所示,这是腔长变化范围过大、相位变化超出arctan函数取值范围所致,需通过加减mπ对相位进行补偿,补偿后的解调结果如图4(c)所示。
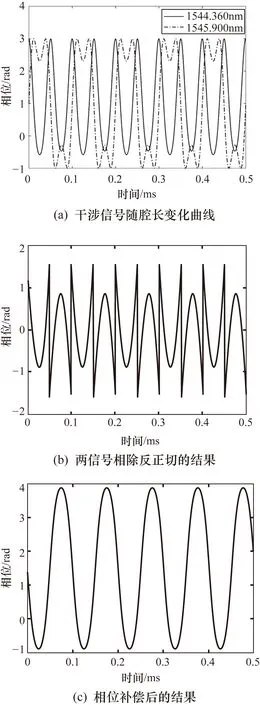
图4 双波长反正切仿真图
3 实验
通过实验验证整个方案的可行性,对自制的EFPI振动传感器进行实验。利用可调谐激光器以20 pm 的间隔从1530 nm扫描到1560 nm,得到EFPI传感器的干涉光谱,如图5(a)所示。干涉谱的其中两个峰值分别在1532.512 nm 和1542.152 nm处,通过条纹计数法计算出传感器的初始腔长为122.581 μm。利用最小峰值和最大峰值得到直流分量A为3.4 V。
根据干涉谱选择两束正交光的波长,固定激光器的一个波长为1530.700 nm,通过式(5)可以计算出激光器的另一波长为1537.900 nm。通过可调谐激光器的“波长-电流”查询表,获得两波长的电流工作点,FPGA控制电流源输出相应的电流,控制激光器的输出波长,同时两束不同波长的光以80 kHz的频率切换,即每束光的频率为40 kHz。用横河光谱仪AQ6374采集激光器两束光的光谱,两束光的波长如图5(b)所示。

图5 确定初始腔长和正交波长
为了测试解调系统的动态解调性能,将EFPI振动传感器安装在振动台上,振动台以10g的加速度和2.25 kHz频率产生正弦信号,引起EFPI传感器腔长的变化。腔长的变化将会引起两束光干涉信号的变化,同时采集两干涉信号,干涉信号的采集速率为 30 MS/s,如图6(a)所示,其局部放大图如图6(b)所示,由于两束光以一定的频率切换,所以通过时域上的差别将两束光的干涉信号进行区分。区分后的两干涉信号如图6(c)所示。并将两信号减去直流分量A,然后进行反正切处理,处理结果如图6(d)所示。

图6 10g加速度下的测试结果
为了对更大的腔长变化量进行测试,将振动台加速度设置为15g,EFPI传感器干涉信号有显著的变化。采集回的信号如图7(a)所示,通过时域区分之后两干涉信号如图7(b)所示,振动台产生的原始信号如图7(c)所示,两干涉信号消除直流分量反正切的结果如图7(d)所示。从不同加速度下的解调结果中可以看出此解调方案可以对不同的腔长变化量进行解调。
如图6(d)和图7(d)所示,当加速度变化时,相位的峰峰值也发生了明显的变化。在6g、8g、10g、12g和15g的加速度下,加速度与相位峰峰值的关系如图8所示。通过计算得出相位峰峰值随加速度的变化为0.052 rad/g。
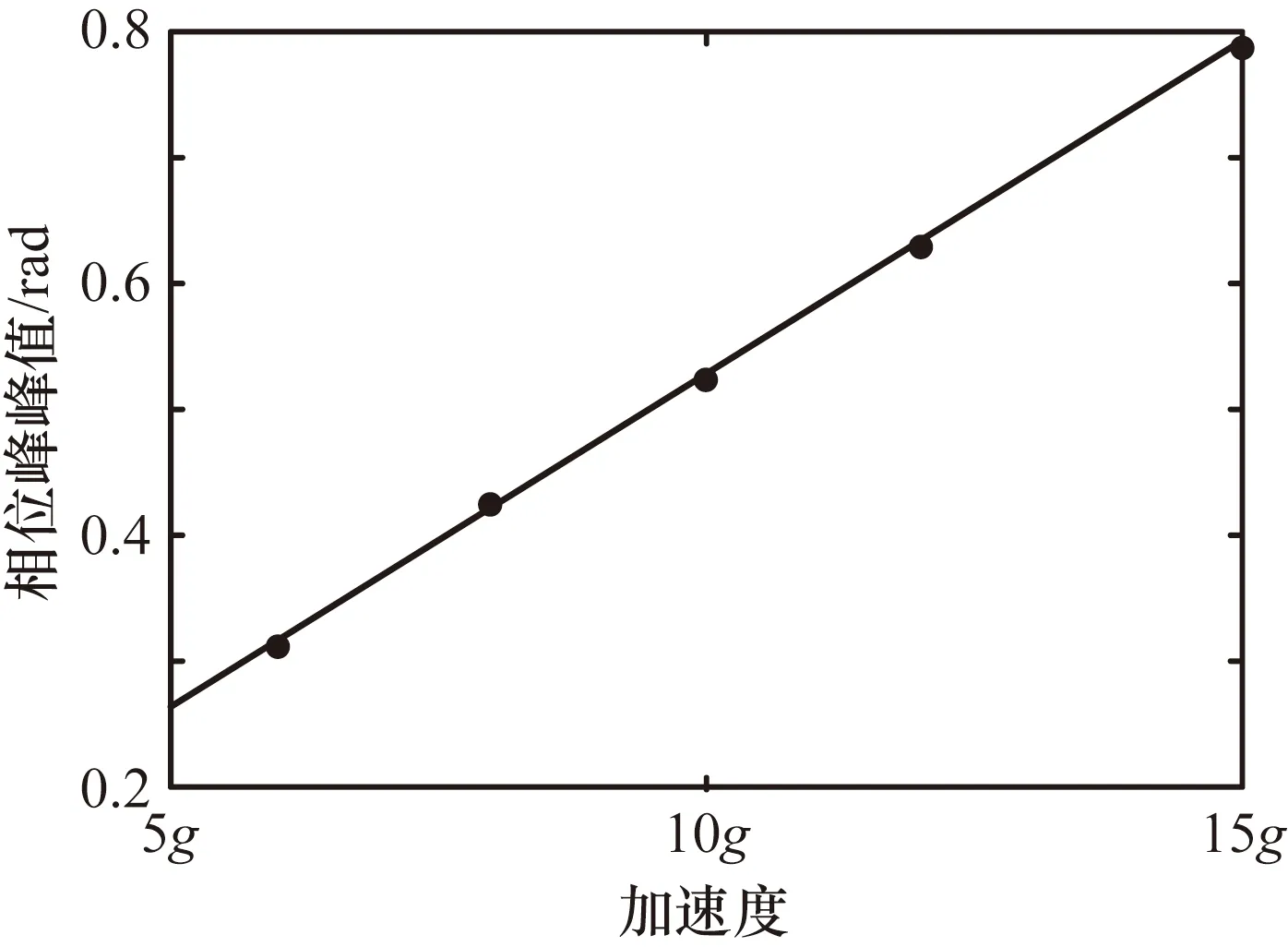
图8 不同加速度下的峰峰值
4 结束语
针对传统双波长正交相位解调EFPI传感器,存在两条光路之间光功率不平衡的问题,研究了基于可调谐激光器的双波长正交相位解调方案。通过调节激光器的输出功率和光电探测器的放大倍数,保证干涉信号的强度。激光器的宽范围线性扫描是直接测量直流分量和EFPI传感器的初始腔长的基础。激光器波长切换速度快的特点是利用一条光路进行双波长正交解调的关键。为了对系统的动态性能进行测试,实验中通过振动台产生正弦信号,解调系统能精确地对振动信号进行解调,表明该解调方案具有响应速度快的特点。同时使用单支激光器和单个光电探测器解决了在测量振动传感器加速度的应用时光程差的差异、光源波动等问题。由于此激光器波长调谐范围广,对比基于DBR等激光器的解调系统,基于MG-Y激光器的解调系统可以对不同腔长的EFPI传感器进行解调,但当EFPI传感器腔长固定后,对两工作波长的选择需要较高的精度。
