基于交互多模型(IMM)的航空器冲突探测算法
2022-03-23李保强王学轩胡苗苗李云飞
黄 晋,李保强,王学轩,胡苗苗,李云飞
(中国民用航空飞行学院 空中交通管理学院,四川 广汉 618307)
自动相关监视广播(ADS-B)系统是国际民用航空组织(ICAO)推荐的下一代空中交通管制系统的CNS/ATM的关键组成部分。ADS-B向附近区域的其他飞机、地面车辆和地面站广播一架飞机的识别、位置数据和运行信息。ADS-B航迹是指飞机的运动轨迹,由飞机的机载ADS-B设备报告的点连接而成。数据传输过程中存在不可避免的误差或干扰,造成信息的不精确或者错误,需要通过滤波方法对数据进行预测和修正,使航迹更加精确[1]。
随着中国空中交通量增加,航空器之间发生碰撞的风险概率也随之增大。因此,航空器碰撞预测在空中交通管制具有重要意义[2-3]。为了判断两架飞机是否有相撞风险,传统的研究一般通过算法计算概率的方法来预测航空器可能发生的冲突[4]。Paielli和Erzberge提出了假设两个航空器的速度保持不变,计算当前时刻量航空器瞬间碰撞概率的方法[5-6]。
近几年关于航空器冲突风险预测与评估的研究多基于模型的仿真计算。文献[7]采用了Reich模型对具体的碰撞概率进行了量化计算。其中,基于Reich模型的研究衍生出的基于Event的航空器冲突计算模型,以及随后研究发展的改进方法和模型[8-10]。以上方法碰撞概率主要基于计算关于航空器盒式模型之间的穿越概率。此外,还有另外一种基于航迹仿真和数据处理和可视化以及飞机性能和通信导航监视系统性能的碰撞概率计算模型[7-13]。同时,基于航空器动力学模型和概率模型建模和碰撞概率计算的研究进一步发展[14-15]。本文提出了一种基于飞机状态参数和飞行模型的线性的混合系统来表示飞机的航线模型。采用相互作用多模型(IMM)来判断飞机机动(飞行模型)[16]。以航空器飞行模型中的等速模型和盘旋模型作为多模型。从含有飞机位置、速度信息的ADS-B信号估计飞机的位置和速度,判断航空器的飞行模型及所处状态[17]。根据ADS-B信号显示的飞机的位置,速度与航空器信息,在一定时间后由相互作用多模型来预测各飞行模型下的航空器的碰撞概率。
1 基于IMM的线性混合系统
1.1 飞机的两种动力学模型
研究采用匀速运动模型(CV)和盘旋转弯模型(CT)两种独立的动力学模型来描述飞机在二维平面上的航线[18]。其中CV模型表示匀速直线运动,CT模型中运动速度不变,机头以一定的转弯率变化的机动运动。飞机航线模型的状态参数为
(1)
每个模型用离散线性系统状态方程表示为
X(k+1)=FjX(k)+Gjwj(k)
(2)
Y(k)=HX(k)+v(k)
(3)
CV模型和CT模型的系统矩阵分别为
(4)

(5)
ADS-B信号包含了飞机的位置高度、航向和速度信息,根据ADS-B数据格式规定,模型中表示飞机运动状态数据的矩阵为[19-20]
H=I4×4
(6)
当m(k)代表时间k时的飞行状态时,可以将跃迁矩阵转换为马尔科夫链,即
πij≜Prob{m(k+1)=i∣m(k)=j}
(7)

(8)
这种动力学系统模型也称为线性混合系统。
1.2 交互多模型(IMM)
为了通过线性混合系统表示的飞机动力学模型来估计飞机的位置和速度,本文采用了交互多模型(IMM)。基于交互多模型构造了符合线性混合系统模型的卡尔曼滤波器,以滤波器估计的模型概率为权重,计算飞机状态变量的估计值。通过IMM估计可得状态变量和协方差为
(9)

(10)
(11)

(12)
式中,μi|j(k|k)表示从模型i到模型j的转移概率,可以从模型转移矩阵和模型概率μj(k)中得到。计算过程为
(13)
(14)
模型概率μj(k)在每个模型的卡尔曼滤波中以计算出的残差rj和残差的协方差Sj所得似然函数j为权重值,计算公式为
(15)
(16)
式中,模型概率的初值μj(0)与系统的初始情况有关。
2 飞机碰撞概率预测
2.1 飞机的两种动力学模型
假定两架飞机A和B在时间k上分别在位置χA(k)、χB(k)上的概率为二维正态分布,即
(17)
(18)
如果两架飞机之间的相对距离为XAB,则相对距离的概率为
(19)
χAB(k)=χA(k)-χB(k)
(20)
PAB(k)=PA(k)+PB(k)
(21)
两个航空器的碰撞定义为两个航空器之间的相对距离小于用户定义的圆(安全区)半径,模型体现为
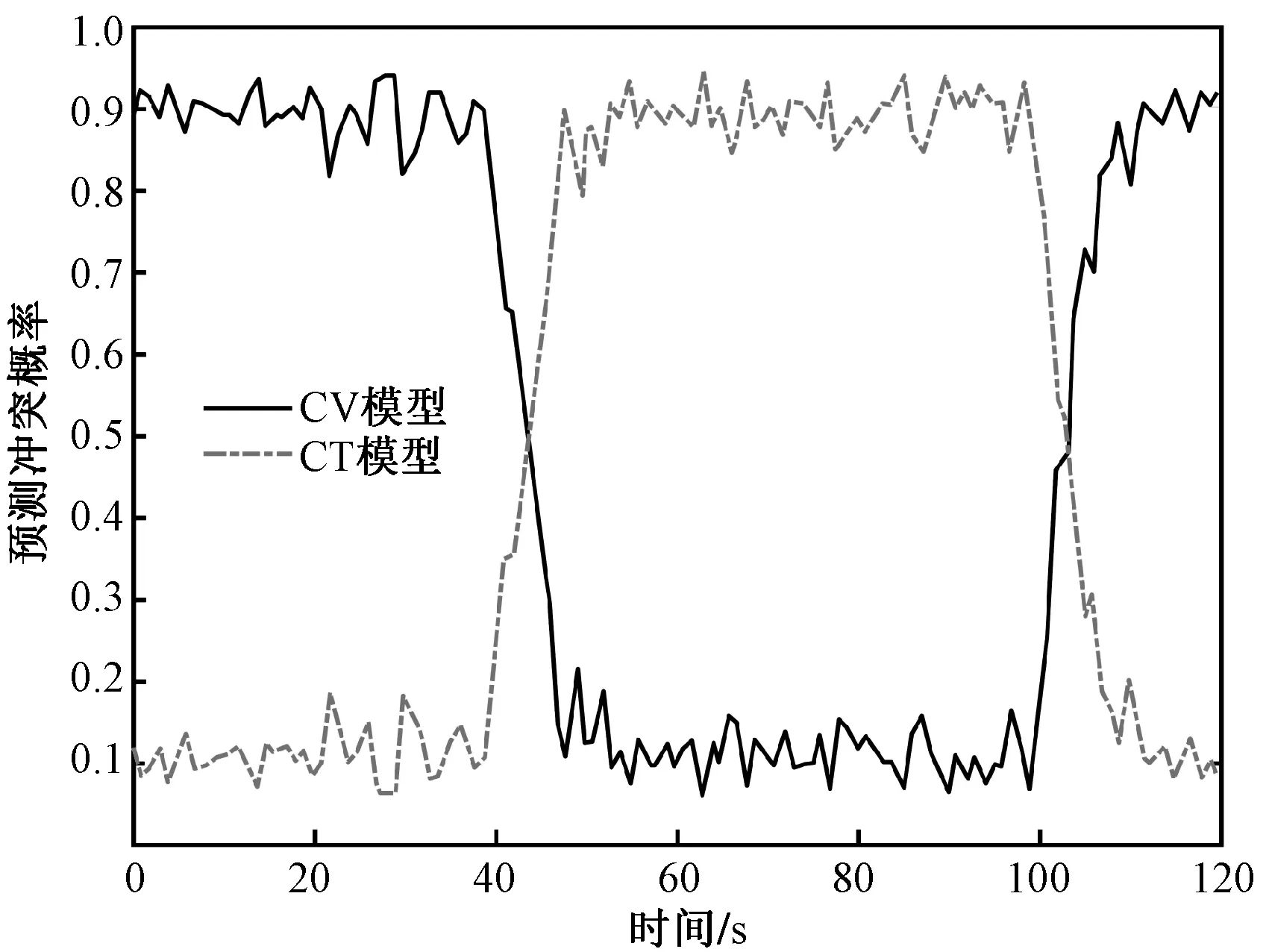
D={|χAB| (22) 式中,rsafe为安全区的半径,取决于飞机适用的法规规定。两架飞机在时间k上的碰撞概率为 (23) PAB=LLT (24) T=L-1 (25) 通过上述坐标变换,以REF航空器为中心的安全区由圆变形为椭圆,如图1所示。在两航空器速度向量恒定的情况下,使用一维正态分布进行积分计算碰撞概率,可得出基于速度向量扩展的矩形安全区域[21-23]。 图1 传统扩展冲突保护区模型 在此基础上,将上述REF的外接椭圆改进为矩形区域。在矩形安全区内使用正态分布求积分,最终计算得出两航空器的碰撞概率。通过这种改进后的方法可计算航空器之间的碰撞概率,原理如图2所示。 图2 改进的矩形冲突保护区模型 (26) (27) 式中,Z1(δ;·)代表一维正态分布的累积分布包含数,其值通过式(28)进行计算,公式中的erf为误差函数。 (28) Xj(k+1)=FjX(k) (29) (30) 本文分别从传播的状态变量和协方差计算碰撞概率p[C(k+nT)]j。时间k+nT中,冲突概率由时间k的模型概率μj(k)为权重的各模型的冲突概率(时间k+nT)之和确定。 (31) 根据前面提出的碰撞概率预测算法,通过MATLAB进行仿真实验验证碰撞概率预测算法。图3显示了两架可能相撞的飞机的相对轨迹。 图3 两个航空器的运动几何模型 当STO航空器发现REF航空器后,以一定的转弯率[1.5(°)/s]进行转弯回避。STO航空器从40 s开始盘旋,10 s后返回到巡航直线运动。安全区半径设定为2 km;安全区圆心位于REF航空器的中心,STO航空器安全区由周围的椭圆表示。可以由式(21)计算两航空器相对距离的误差协方差。实际应用中,算法的安全区半径可根据空域具体情况规划大小,根据航空器型号对应的法规或管制员的指令使用来确定。本实验对10 s后两架飞机之间的碰撞概率进行预测。 图4给出了基于交互多模型(IMM)算法预测得到的STO航空器各飞行模型的碰撞概率。假设CV模型初始碰撞概率为0.8,CT模型初始碰撞概率为0.2。计算可知:从开始盘旋的50 s开始,进入CT模型的碰撞概率逐渐增大;从开始盘旋的110 s开始,进入CV模型的碰撞概率明显增加。 图4 预测两航空器碰撞冲突概率 实验提出算法仿真预测的碰撞概率结果如图5所示。实线表示时间T上的瞬时碰撞概率。点线是航空器在CV模型下,15 s后预测的碰撞概率。点线表示CT模型下预测所得,15 s后的碰撞概率。算法预测的碰撞概率随时间变化,同时与实际的瞬时碰撞概率进行比较。 图5 预测所得两机的冲突概率对比 由图5可知,在转弯前航空器处于匀速运动状态,CT模型预测所得碰撞概率小于实际碰撞概率。可以看到,从转弯的15 s以后,利用CV模型和CT模型预测的碰撞概率大于实际碰撞概率。盘旋15 s后,随着飞机的机动飞行,多模型(IMM)算法的预测值与实际瞬间碰撞概率值在数值上大小较为接近,但多模型(IMM)算法预测存在10 s左右时延。从波形的拟合度来看,多模型(IMM)算法优于CT模型,CT模型与CV模型预测效果相差不大。侧面证明了本文提出的相互作用多模型(IMM)算法的有效性。 由表1可知,多模式交互算法与其他传统运动学模型的均方误差相比明显降低。对比体现了多模型(IMM)算法性能优于其他传统模型。 表1 算法性能对比 基于多模型(IMM)算法,提出一种考虑航空器运动状态的两航空器碰撞概率预测方法。碰撞概率计算创新采用了近似正态分布积分的方法。预测模型仿真中使用ADS-B数据格式对3种运动模型下的碰撞概率预测结果进行了对比分析,证明了基于多模型可以明显减少传统基于单模型碰撞概率预测中的误差。本文研究结果对ADS-B航迹下一定时延内两航空器冲突概率预测研究具有一定借鉴意义。




2.2 碰撞概率预测

3 仿真实验



4 结语
