基于单基地嵌套MIMO 雷达的联合角度和多普勒频率参数估计
2022-03-23黄章斌
黄章斌,郭 滨,管 留
(解放军75842 部队,广州 510000)
0 引言
近年来,集中式MIMO 雷达在雷达和通信中表现出的巨大优势而成为了研究热点。基于阵列排列的不同位置,集中式MIMO 雷达包括单基地MIMO 雷达和双基地MIMO 雷达。对于双基地MIMO 雷达,其发射角和接收角是不同的。对于单基地MIMO 雷达,由于发射阵列和接收阵列相距较近,其发射角和接收角是相同的。本文主要是研究单基地MIMO 雷达中的角度参数估计问题。
为了实现集中式MIMO 雷达中的角度参数估计,在文献[4-6]中分别提出谱峰搜索类算法和旋转不变类算法。为了提升集中式MIMO 雷达在低信噪比和小采样快拍数背景下的角度参数估计精度,文献[2-3,7]分别提出不同高分辨的稀疏恢复类算法。针对双基地MIMO 雷达中的联合角度和多普勒频率估计问题,在文献[8-10]中提出基于三阶张量模型的多维旋转不变算法。针对单基地MIMO 雷达中相关信源背景下的角度和多普勒频率估计,文献[11]提出空间平滑技术。为了降低算法的计算复杂度,文献[12]提出压缩感知平行因子算法来实现对单基地MIMO 雷达中的角度和多普勒频率进行估计。然而,以上所提出的算法仅仅是针对半波长发射阵列和半波长接收阵列的集中式MIMO 雷达进行的研究。因互质阵列和嵌套阵列能够实现欠定背景下的角度参数估计,文献[13-15]对其展开了深入研究。一个互质阵列包含两个均匀的互质采样子阵,其中,第1 个子阵包含个阵元,其阵元间距为个波长,第2 个阵列包含个子阵,阵元间距为个波长。一个互质阵列能够利用+-1 阵元实现◦()个信源的估计。但是,互质阵列的差值阵列域包含一些空洞的元素,故其不能充分利用阵列的自由度。嵌套阵列包含2 个均匀的子阵,其中第1个子阵包含1 个半波长的均匀线阵。相比于互质阵列,嵌套阵列的差值组合阵列域不存在空洞的情况,因此,其能够充分利用阵列的自由度。
在本文中,为了充分利用嵌套阵列的内在优势,通过把单基地MIMO 雷达中的发射阵和接收阵设计成嵌套阵列来实现角度和多普勒的高精度估计。相比于半波长的均匀线下发射和接收阵列,所设计的新型单基地MIMO 雷达结果能够进一步提升最大可分辨的目标数。并且,通过对阵列接收数据进行空时处理来构建一个特殊的三阶张量模型。最终,通过平行因子算法可以对角度和多普勒参数实现有效的求解和角度参数自动配对。
1 信号模型
如图1 所示,考虑一个包含个发射阵列和个接收阵列的单基地MIMO 雷达系统。所有的发射阵列和接收阵列均是各项同性的嵌套阵列,阵元位置分别为d和d。其中,d和d均是归一化波长的整数倍。在发射端,通过利用个阵元来实现窄带正交波形的辐射。在接收端,对于经过匹配滤波之后的接收数据进行延迟处理。假设存在窄带远场非相关目标θ,=1,2,…,,则,匹配滤波之后的阵列输出可以被表示为

图1 单基地嵌套MIMO 雷达示意图

根据式(2),通过把重复的元素移除之后,获得的新的阵列接收数据为


如图1 所示,经过不同的时延之后新的阵列接收数据为

其中,
对于个采样快拍,多快拍的阵列接收数据为

2 基于平行因子算法的联合角度和多普勒估计
根据式(7),可以构建如下的三阶张量模型
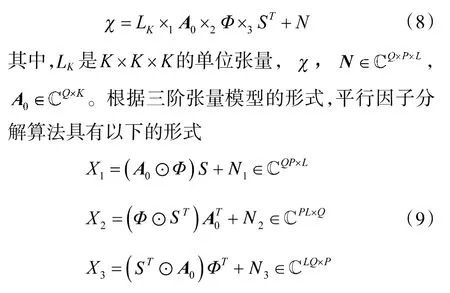
在这里,通过利用三线性迭代最小二乘来实现对平行因子算法进行有效的求解。三线性最小二乘算法的原理主要是利用前面得到的估计矩阵更新新的加载矩阵。根据式(9),关于3 个加载矩阵的最小二乘解具有如下的形式
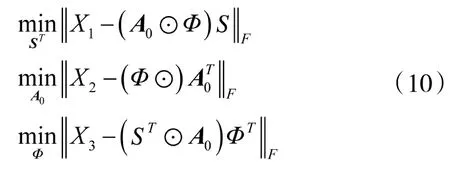
相应的,最优的解,A和Φ 分别为


因此,相应的角度θ和多普勒频率f可以通过如下的方式求解


其中,arcsin()表示反正弦值。根据平行因子分解的特性,估计得到的角度和多普勒频率满足自动参数配对。
3 仿真实验
在该部分,通过一系列的仿真实验来验证所提算法对于单基地嵌套MIMO 雷达下角度和多普勒频率估计性能的有效性和优越性。在接下来的仿真中,采用一个具有发射阵列和个接收阵列的窄带单基地MIMO 雷达,其发射阵列和接收阵列是各项同性的嵌套阵列。均方误差被定义为如下

首先,验证所提算法的欠定空间谱估计性能,此时窄带单基地嵌套MIMO 雷达系统中发射阵列个数和接收阵列个数均为6。考虑11 个具有相同功率的窄带非相关信源,如图2 所示,所提算法能够有效的实现角度参数和频率参数的估计。并且,估计得到的二维参数满足自动参数配对特性。
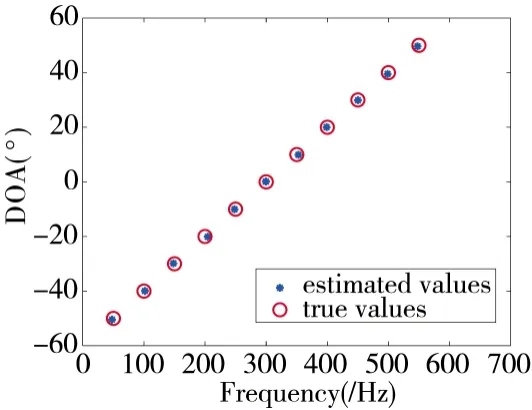
图2 所提算法的空间谱估计性能
第2 个实验中,使用蒙特卡洛仿真实验来验证所提算法的均方误差随信噪比的变化。考虑4 个等功率的非相关窄带信源,其角度和多普勒频率分别为(10,100 Hz),(20,200 Hz),(30,300 Hz)和(40,400 Hz)。其他的仿真参数和第1 个实验相同。在图3(a)和图3(b)中,信噪比的变化范围是-10 dB~16 dB,变化步长为2 dB,此时快拍数固定为100。从图3 可以看出,相比于ESPRIT和HOSVD 算法,所提出的平行因子分解算法具有较好的角度和频率参数估计性能。并且,所提算法在信噪比较低时仍然能够获得较好的角度和频率参数估计精度。
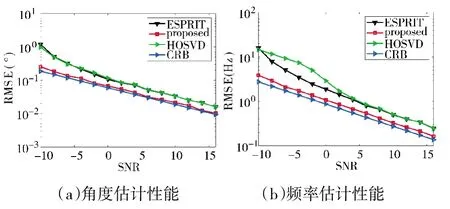
图3 参数估计性能随信噪比的变化
最后,为了进一步验证所提算法的优越性,考虑所提算法的均方误差性能随不同时间延迟的变化。这里,考虑3 个时间延迟场景,即=6,8,10。对于不同的时间延迟,均方误差曲线如图4 所示。其余参数和第2 个实验相同。从图4(a)和图4(b)可以看出,在固定目标和嵌套阵列的约束下,越大的时间延迟,将会得到越好的角度和频率参数估计性能。因此,所提出的空时处理过程对于嵌套阵列能够获得良好的角度和频率参数估计性能。
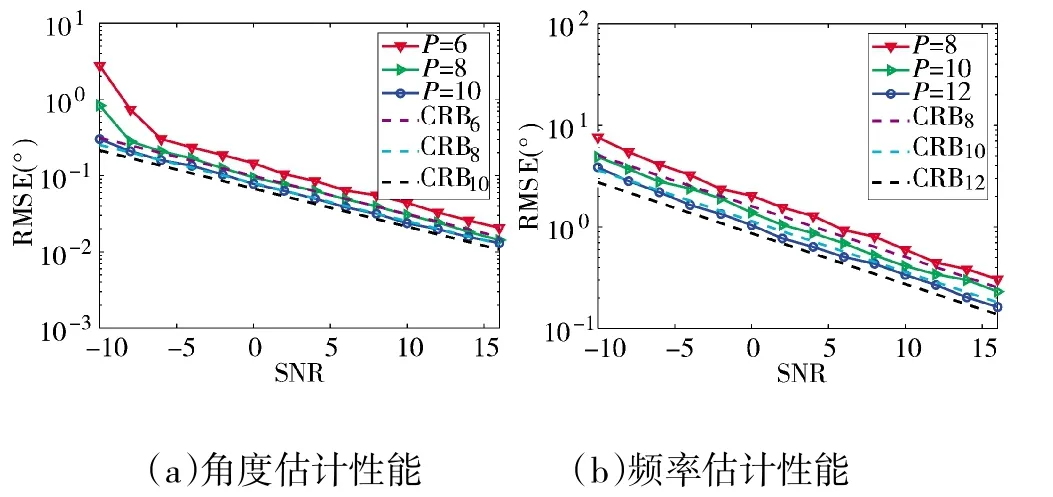
图4 不同时延下的均方误差性能
4 结论
在本文中,通过对单基地MIMO 雷达发收阵列进行嵌套设计来实现单基地MIMO 雷达中角度参数和频率参数估计性能的提升。并且,通过提出平行因子算法能够有效地实现阵列接收数据张量模型的充分利用。所提算法在实现单基地MIMO 雷达中高精度二维参数估计的同时,能够实现角度参数和频率参数的自动配对。理论分析和仿真实验验证了本文所提算法的有效性。
