ICT支持的塔吊安全管理框架——回顾与展望
2022-03-21邓逸川
段 锐,邓 晖,邓逸川,2
ICT支持的塔吊安全管理框架——回顾与展望
段 锐1,邓 晖1,邓逸川1,2
(1. 华南理工大学土木与交通学院,广东 广州 510640;2. 亚热带建筑科学国家重点实验室,广东 广州 510640)
塔吊是建筑工程中使用频率最高的垂直运输工具。由于塔吊的运行风险较高,提高其安全管理水平成为业界亟待解决的问题。近年来,信息与通信技术(ICT)逐渐被应用于塔吊安全管理,但目前该领域的应用多为单点开发且智能化水平偏低,未能很好地满足现有的塔吊安全管理需求。通过查阅近十几年的塔吊安全管理领域的相关文献,将国内外学者对塔吊安全管理研究现状进行梳理,分析了现有研究对象、关键技术、关注度和优劣势。此外,通过对现有方法的分析,提出了未来塔吊安全管理的目标和框架。将ICT技术中有潜力的建筑信息模型(BIM)与计算机视觉技术(CV)融入塔吊安全管理框架中,有利于实现对塔吊运行过程的实时监控和危险预警,有效减少事故的发生。该框架有望促进塔吊安全管理向智能化和信息化转变,为我国建筑工程事业的健康发展提供一些启发。
塔吊;安全管理;建筑信息模型; 计算机视觉技术;建筑事故
1 概 述
据不完全统计,2010—2019年,我国至少发生塔吊生产安全事故382起[1]。唐凯等[2]指出,在建筑行业较大及以上生产安全事故中以土方坍塌、模板坍塌、塔吊倾覆等类型事故居多。李晓东和陈琦[3]指出高处坠落坍塌和物体打击在各类建筑生产安全事故中发生频率最高,且与塔吊有关。因此研究塔吊的安全管理方法,提升其安全管理水平,具有重要意义。
1990年REASON[4]提出事故的瑞士奶酪模型。其将安全系统看似一叠奶酪,每块奶酪代表一层防线。奶酪本身内部具有许多不规则的孔洞,代表潜在的系统漏洞,不同奶酪上洞口的大小及位置决定危险源射线能否通过该模块。如果一叠奶酪的孔洞刚好可以被危险射线直穿,即可演变成事故。根据该模型,结合塔吊安全管理实际,总结得出塔吊事故致因模型,如图1所示。
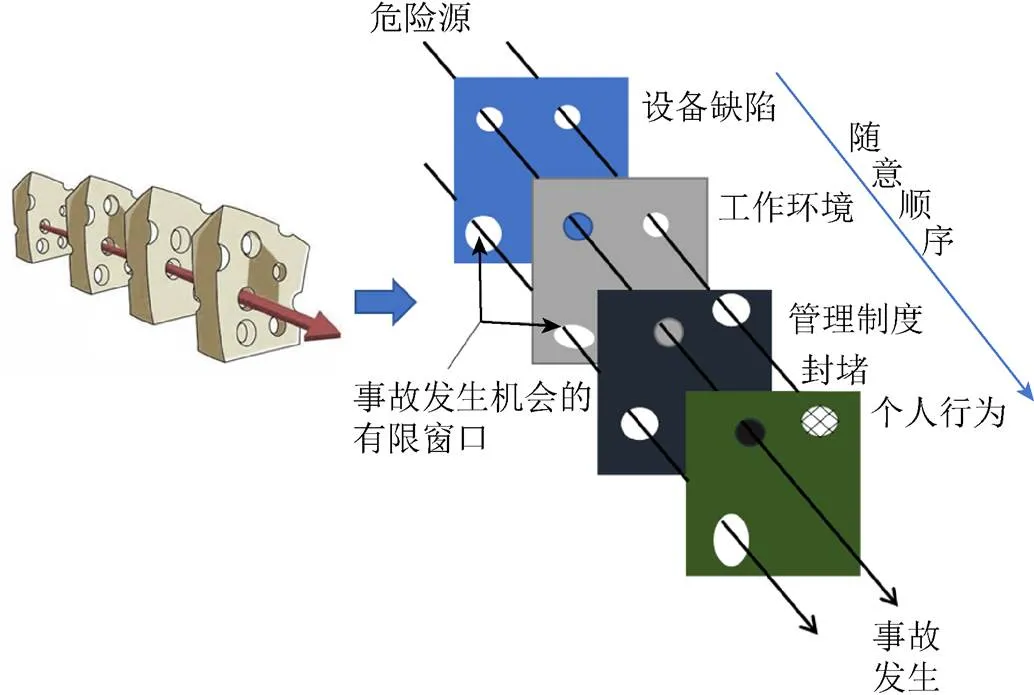
图1 塔吊事故致因模型
由于塔吊的结构特点和高风险属性,在运行过程中需要多方人员的配合操作。不仅消耗大量的人力物力,且难以达到良好的安全管理效果。根据施工现场的动态性及劳动力密集的特点,模型中的4个屏障存在许多不可控的漏洞,导致危险源射线通过屏障并形成事故。
信息通信技术(information communications technology,ICT)涵盖了如计算机、大数据、云计算、物联网、区块链、人工智能等信息、通信技术及相关的应用软件。发挥ICT的优势,可实现对施工场地和塔吊的实时精确监测,在塔吊事故致因模型各个屏障上有效地填补孔洞,减小事故发生的可能性,满足施工现场数字化、标准化、精细化的管理需求,提高建造效率和精度,提升塔吊安全管理能力。
目前,尚未有学者对基于ICT的塔吊安全管理研究进行总结性梳理。本文基于上述背景,对相关文献进行搜集和梳理,以事故致因理论为落脚点,揭示塔吊的安全隐患及其深层原因,总结现有研究的不足并讨论未来塔吊安全管理的目标和ICT的应用方向,为施工全过程的塔吊安全管理提供新的思路,研究流程如图2所示。
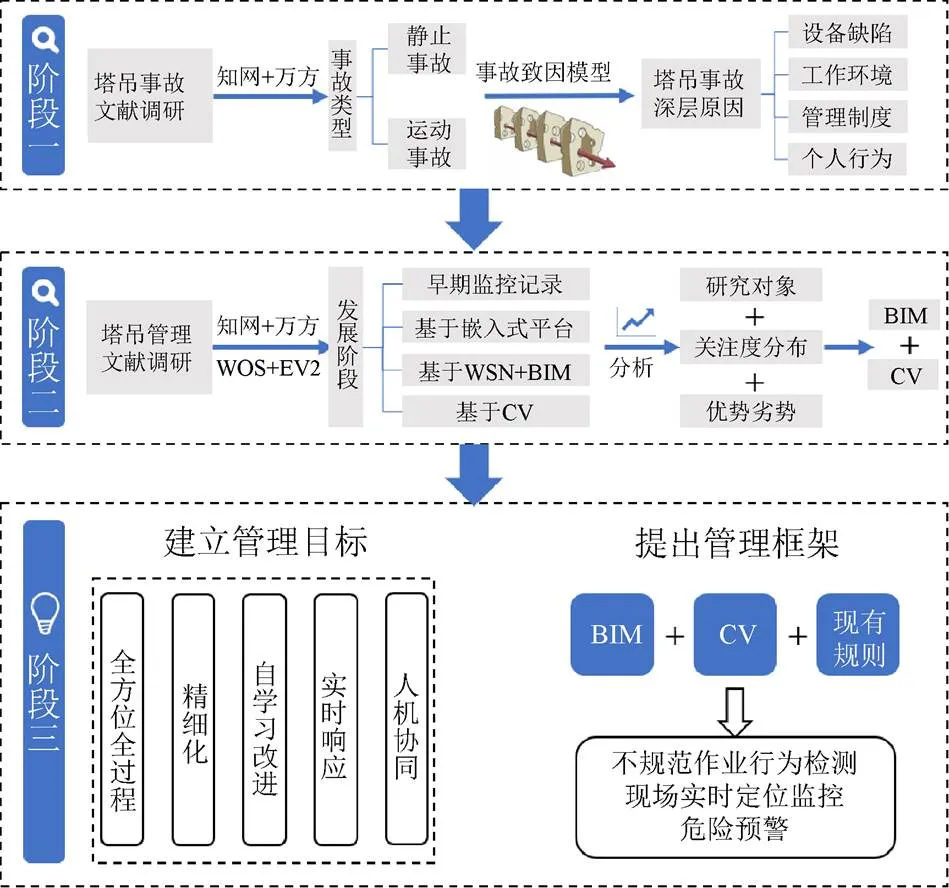
图2 综述流程图
2 塔吊事故类型及其原因
2.1 常见的塔吊事故类型及其直接原因
塔吊安全事故的类型较多,主要有倾翻、折断臂、碰撞、构件脱落、吊物坠落、工人事故及其他事故,但以倾翻、断脱绳和碰撞事故为主[5]。如图3所示,本文将塔吊运动状态分为静止事故和运动事故。
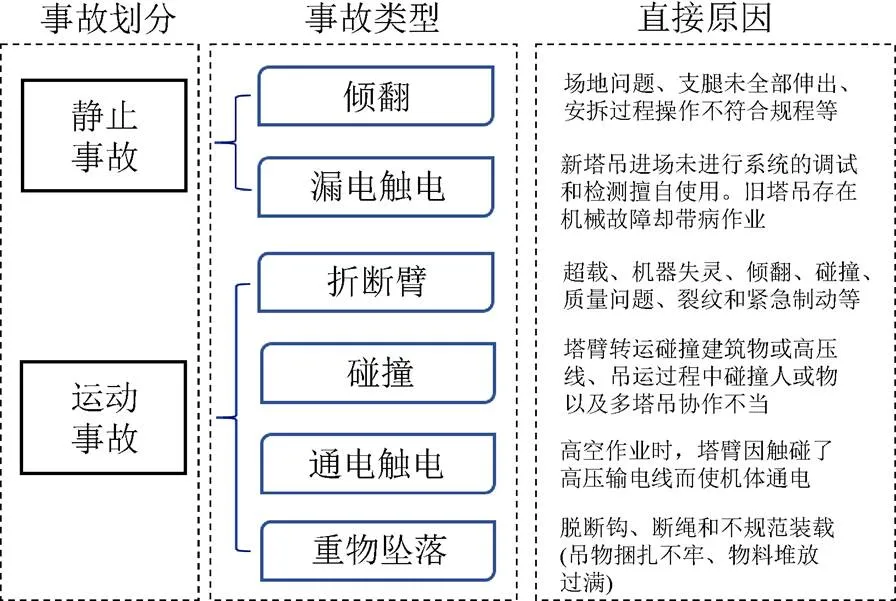
图3 塔吊事故划分及其直接原因
2.2 塔吊事故深层原因
图4将塔吊事故致因理论与塔吊安全管理实际相结合,分析并梳理塔吊事故的深层原因。
2.2.1 设备缺陷
(1) 塔吊设计及制造缺陷。如图5所示,塔吊事故类型中塔吊倒塌为66.05%,塔臂折断为9.88%[6]。这2类事故均与塔吊质量有关。企业为了赚取利润而降低成本,使得产品质量得不到保证、设计缺少人性化、安全防护装置不齐全。
(2) 未调试检测直接使用。施工单位为了加快施工进程,对新塔吊未经调试与检测就立即投入使用,致使塔吊使用过程中发生机械故障而造成事故。
(3) 长期使用造成的损耗。焊缝生锈、电气元件损坏、钢丝绳磨损、螺栓松动等损耗,使塔吊故障和事故频发。
2.2.2 工作环境
(1) 恶劣环境等不可抗力因素。塔吊在露天环境下作业,受环境的影响较大。风雨使塔臂转动造成碰撞事故,甚至造成塔吊结构失稳。雾霾会影响塔吊操作人员的视线,高温或寒冷天气也会影响操作人员的身体状况。
(2) 塔吊作业半径内有高压线。部分施工场地处于市区,施工范围有限。高空作业时塔臂触碰高压线而使塔吊机体通电或倾翻。
(3) 多塔吊协同作业不当。在同一个施工现场有2台或多台塔吊实行群塔施工时,塔臂之间的回转范围容易有交叉,若协作不当极易造成碰撞事故。
2.2.3 管理制度
(1) 安全监督和管理不足。若施工过程中安全监管足够且有效,可消除绝大部分塔吊事故[6]。根据安全生产月的经验,加强施工安全监管有助于在短期内减少塔吊事故的发生。
(2) 安全培训和考核不足。在工程建设中,专业知识需要不断更新,同时工人的安全意识也需要逐步提升。因此,安全培训和考核工作不可或缺。
(3) 安拆队伍的监管不足。无资质的团队进场进行安装、顶升和拆除工作,导致无法进行专业的操作,方案不符合实际工程状况,为后期的塔吊使用埋下隐患。

图4 塔吊事故深层原因
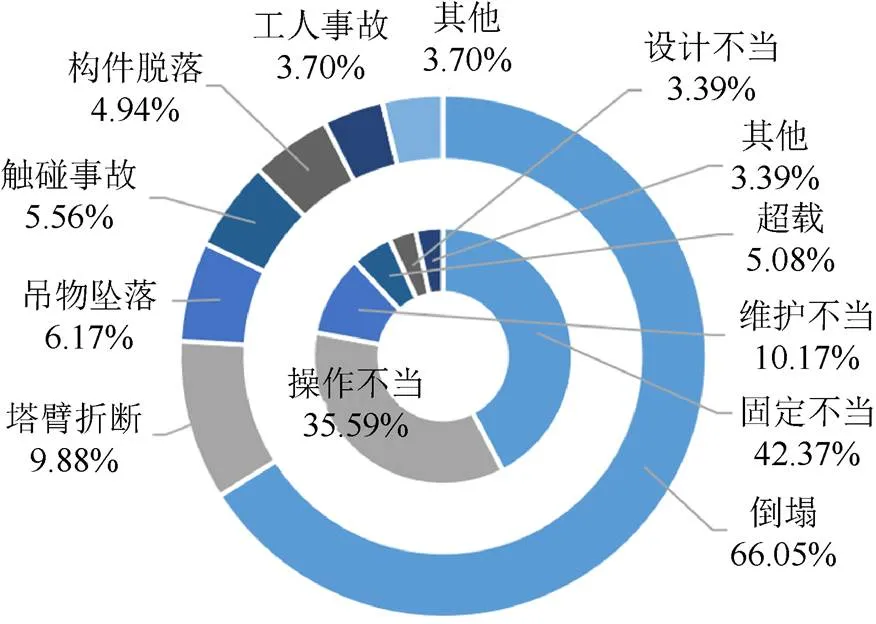
图5 塔吊事故直接原因(内)和塔吊事故类型(外)
2.2.4 个人行为
(1) 人员专业知识和技能不足。如图5所示,塔吊事故发生的主要原因为操作不当(35.59%)[6]。误操作导致了较大比例的塔吊事故,因此培养具备专业知识和技能的高素质塔吊操作人员有利于减少塔吊事故。
(2) 人员故意违规或疲劳操作。施工人员为了抢施工进度,未遵守塔吊“十不吊”原则,故意违规操作,或操作人员疲劳操作造成失误。
(3) 人员协调不当造成误操作。塔吊司机、地面建筑工人和指挥人员的协调出现问题或误判而造成误操作。
3 基于ICT支持的塔吊安全研究综述
为了分析塔吊事故的原因,本文在知网(CNKI)、万方等国内知名数据库,以“塔吊”“吊装”“起吊”“安全”“管理”“信息与通信技术”和“计算机”等关键词进行查询研究,同时在Web of Science (WoS)、Engineering Village2 (EV2)等国外知名数据库以“tower crane”“lifting”“elevator”“elevating”“safety”“management”“ICT”和“computer”等为关键词同期进行相关研究,收集了2007—2021年的相关期刊论文(31篇)和硕士学位论文(10篇)并进行了分类和总结。分析结果显示,塔吊安全管理技术大致经历了4个发展阶段。
3.1 早期传统建筑工地监控记录系统
早期的塔吊管理,仅依赖于建筑工地传统的监控系统,简单记录塔吊施工情况,未能将其合理地应用到塔吊安全防范方面。塔吊的保护装置指当某一监控指标超限时,其保护装置自动切断电源。然而突然断电会对塔吊的电气元件造成较大损伤,缩短使用年限。此外,还存在无法预测风险、缺乏显示及人机交互功能、适应性差等缺陷[7]。
3.2 基于嵌入式平台的塔吊安全监控系统
嵌入式系统是软件和硬件的综合体,可以用来控制、监视或辅助各种设备的运行,从而实现嵌入对象的智能化。嵌入式处理器具有体积小巧、数据处理快速、成本低廉、易于实现无线通信的优点,所以早期的塔吊智能化安全管理研究基本利用嵌入式技术来设计塔吊工作状态监测装置。杨山虎[8]介绍了基于嵌入式平台(advance RISC machines,ARM)的塔吊图像监控系统。该系统将Open-CV库引入嵌入式Linux系统,开发了吊钩动作跟踪算法,实现了吊钩动作的智能跟踪。该系统在图像采集与无线传输已部分达到产业化水平,但嵌入式设备运算能力限制了吊钩智能跟踪模块的性能,在形状较为复杂的背景中,智能跟踪算法很容易失效。张兵[9]详细地分析了塔吊的防碰撞问题,建立了以嵌入式设备为基础的群塔防碰撞控制系统。刘俊亮[10]提出基于ARM的单台塔吊防倾翻监控仪的总体设计方案,实现了塔吊防倾翻预警功能。王旭[11]开发了基于嵌入式平台和机器视觉库的吊钩动作实时跟踪算法,通过标定实时跟踪吊钩,从而减缓驾驶员的视觉疲劳。
3.3 基于BIM与WSN技术的塔吊安全管理研究
建筑信息模型(building information modeling,BIM)是以三维数字技术为基础,对工程项目设施实体和功能特性的数字化表达[12]。无线传感网络(wireless sensor networks,WSN)是一种分布式传感网络,可以利用无线网自行组织网络通讯,使用户可以灵活、多变地设置所需要的网络结构和状态。WSN技术也被建筑业的研究人员所青睐,其主流技术如超宽带(ultra wide band,UWB)、射频识别(radio frequency identification,RFID)、无线通信技术(Wi-Fi)、紫蜂(ZigBee)、蓝牙(Bluetooth)等[13]均被应用于相关研究中,使建筑业的效率不断提高。
CHAE和YOSHIDA[14]开发了基于RFID技术的防碰撞系统,其利用该技术获得塔机等重型设备的工作区域,从而估算工人合适的工作区域,以防止人与设备发生碰撞事故。LEE等[15]开发了塔吊导航系统,该系统使用激光传感器和BIM模型实时输出有关建筑物及其周围环境的三维信息和吊物的实时位置。针对施工现场环境复杂多变、工人行为难以监控等问题,郭红领等[16]通过对施工安全规范的分析和事故案例的调查,对施工现场危险区域进行了定义、识别与分类,建立了基于BIM和RFID的施工现场工人实时定位与安全预警系统模型。其通过数据处理和预警模块能自动分析塔吊运行产生的危险区域,判断工人所处位置是否安全并进行实时预警。刘文平[17]提出了适用于施工现场的综合定位方法。并引入UWB和GPS定位技术对施工现场室内外目标进行定位,开发了施工事故预警原型系统,有效预防了塔吊碰撞事故。江帆[18]将BIM和RFID技术应用到施工安全问题研究中,开发了建设项目安全管理系统。其系统实现了施工前的模拟,避免了起重机与塔吊的碰撞。ZHONG等[19]结合WSN与物联网开发了SMS-TC的塔吊群安全管理系统,使用定制传感器检测塔吊的运行状态,使用短距离Zigbee无线网络和长距离无线GPRS网络实现终端无线通讯,保证多塔吊运行安全。FANG等[20]利用传感器和点云数据的实时主动安全辅助框架,并将其运用于移动式起重机吊装作业中。文献[13]聚焦于塔吊高处坠物事故,应用WSN技术采集的数据,结合BIM技术的数据集成功能,实现施工人员进入危险区域时,自动触发系统的报警装置。文献[21-23]基于BIM和RFID开发了不同的塔吊安全事故预警系统,对现场的工人和塔吊进行实时定位监控,当人与塔吊的距离达到危险阈值时系统会自动预警,以减少塔吊事故的发生。
3.4 基于计算机视觉技术的塔吊安全管理研究
计算机视觉(computer vision,CV)技术是人工智能领域的一个重要组成部分。图像采集设备模拟人眼接受客观世界的信息再转换成数字信息,CV技术则对数字信息进行深度加工,通过算法模拟人脑对信息的处理及判别方式,分析图像并做出相应的判断[24]。从工程的角度来看,其能使人类视觉系统完成任务的自动化,有效地提高生产效率。采用CV技术,可以实现WSN技术所拥有的感知功能,并拥有无接触式信息感知、布设成本低、智能化水平高等优点。
YIN[25]针对塔吊的位置跟踪问题,结合多特征的支持向量机(support vector machine,SVM)的检测方法,实现了较高精度和召回率的塔吊图像检测。孙宏军等[26]提出了塔吊吊臂安全监控系统,其利用视觉传感技术为塔吊吊臂的运行范围划定一片安全区域,即“电子围栏”。通过运行(tracking learning detection,TLD)视觉跟踪算法对图像传感器采集到的信息进行分析处理,实现对塔臂运动轨迹的定位、判断和预警。FANG等[27]提出了由起重机运动监测和荷载摇摆监测2个传感模块组成的可视化技术框架,引入了一种基于CV的方法来跟踪荷载位置,用于荷载摇摆监测。该框架实时监控和可视化起重机状态,以减少盲吊过程中的不安全状况。汪涛和张建德[28]以深度学习的卷积神经网络(convolutional neural networks,CNN)为基础,针对指挥员的吊运手势,构建了由静态和动态手势模块组成复合的神经网络模型,并应用于提取特征进行吊运手势的识别。REDMON等[29]于2015年提出YOLO (you only look once)检测算法。其较之前的深度学习算法更快,Fast YOLO可以达到155 f/s[30],促进了图像处理领域深度学习的发展。张锐[31]运用YOLO算法,在塔吊的空间坐标系中标定、矫正和立体匹配,以确定吊物的深度信息。其局限性在于诸多因素(如摄像头的功能、参数、环境等)使吊钩位置信息存在一定的误差。申耀华[32]利用机器视觉对塔吊构件等典型拼装结构件进行焊缝缺陷检测,采用KNN (k-nearestneighbor)和BP (back propagation)神经网络与SVM分类器对缺陷识别进行对比研究。实验发现采用SVM分类器进行缺陷识别是最优选择。YANG等[33]使用掩模区域卷积神经网络(Mask-RCNN)方法,建立了塔吊安全距离的自动采集、分析和预警系统。并对视频数据进行了识别,对掩模层进行RGB颜色提取,获得危险区域及工人的坐标,最后将坐标和实际距离进行转换得到安全距离。该方法添加了掩膜层,允许相机和识别对象之间存在扭曲角度,使识别精度得到提高。KANG和WANG[34]针对吊运过程中吊钩与钢包耳轴不匹配的安全隐患,提出了使用Mask-RCNN的解决方法。与人工获取匹配状态相比,其方法能快速准确地确定吊钩匹配状态。LUO等[35]开发了使用CV技术识别施工设备的框架,从摄像机采集的信息来自动估计不同施工设备的整体姿态。黄宏安等[36]使用YOLOv3,Faster-RCNN和SSD算法对塔吊的裂缝进行识别,并对比分析了3种算法的优缺点。
3.5 基于ICT的塔吊安全研究分析
3.5.1 研究对象及技术
如图6所示,塔吊安全管理研究对象主要集中于吊钩及吊装监测、危险区域的定位监测、工人监测和塔臂及碰撞监测等方面,而其他对象的研究较少。目前常用的3类ICT技术手段逐渐从嵌入式平台向BIM结合WSN和CV转变,呈现出智能化发展趋势,见表1。
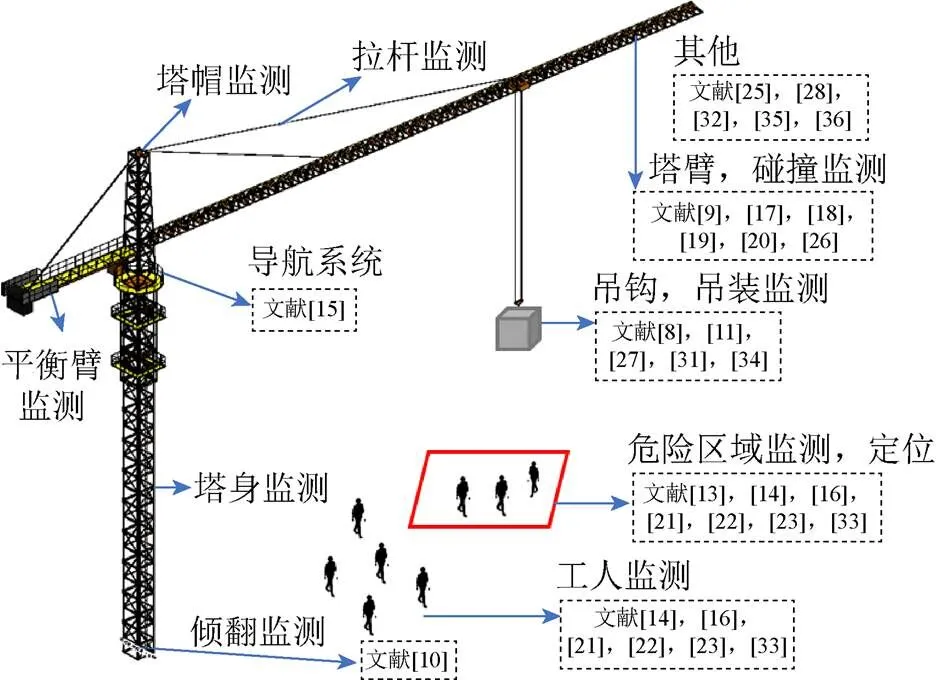
图6 塔吊安全管理研究对象
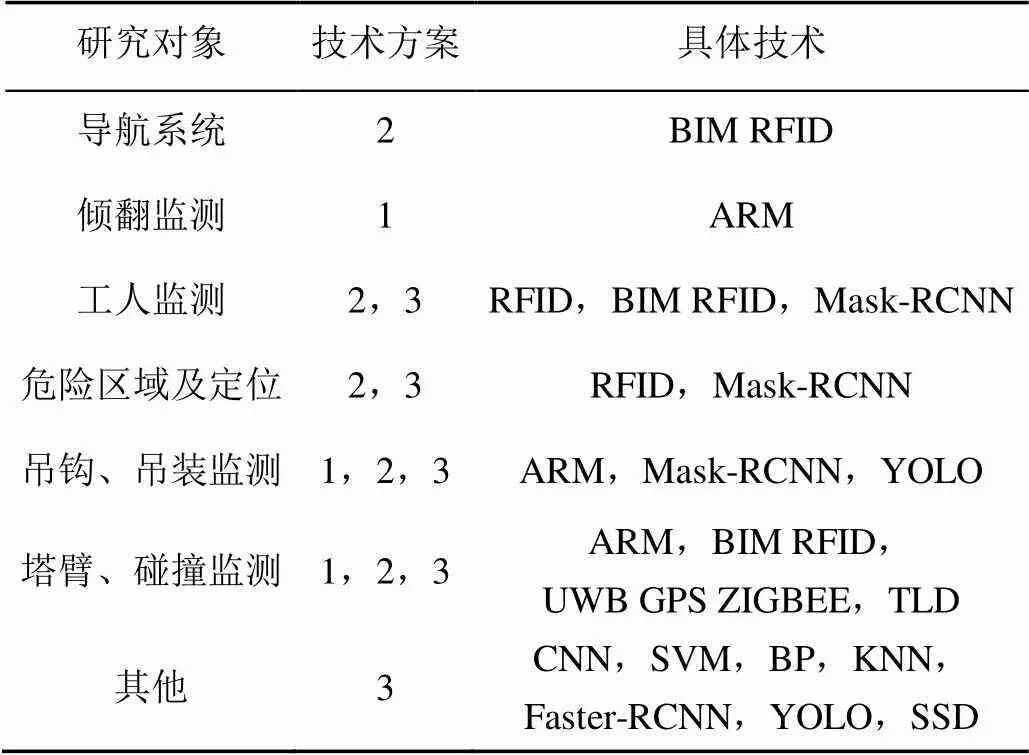
表1 塔吊安全管理研究对象及对应方案
注:1. 嵌入式设备;2. BIM与WSN技术;3. CV技术
塔吊导航系统使用BIM结合RFID技术实时输出导航信息,但在实际吊装任务中未达到实用水平;塔吊倾翻研究中,嵌入式设备还有待实现远程实时性精确监控;在工人和危险区域监测及定位中,使用BIM结合RFID技术实现了危险区域划分、工人实时定位和实时预警,但是相对于使用视觉的Mask-RCNN方案,定位成本较高且精度不足;在吊钩吊装监测上以目标检测算法的视觉方案为主,实现了实时、快速获取吊钩的深度信息。局限在于诸多因素干扰了视觉定位的准确性;塔臂碰撞监测则以BIM结合WSN技术为主,使用传感器获得目标定位信息并使用BIM进行碰撞检查,但在复杂施工的条件下适用性不高。
BIM与WSN结合主要利用布设各类传感器采集的数据表示塔吊的不安全状况。CV通过摄像机采集现场数据,利用搭建各类机器视觉算法获取施工现场物体的坐标信息,再设定危险阈值,从而实现施工现场的定位监测。或通过将摄像头采集的信息进行预处理再将其送入端到端的网络中检测图像目标的质量缺陷,从而提高检测效率和精度。
3.5.2 研究关注度分布
(1) 与塔吊事故类型对应。结合图4塔吊事故类型占比排序,分析其与现有塔吊安全管理研究对象和技术方法在数量上基本成正比例关系。未来继续利用CV技术,在图6中现有研究对象的空白处寻找研究塔吊安全管理的突破点,实现无死角监控管理。
(2) 与塔吊事故深层次原因对应。现有研究与塔吊事故致因理论对应关注度分布如图7所示。在研究较为集中的个人行为和工作环境的监测中,利用BIM结合WSN与CV技术能有效地弥补人力方法的弊端。通过获取设备的深度信息用于辅助人员的操作,可提升效率和可靠度。或分析施工环境和工人位置,但复杂场景下的动作检测尚未实现;对于焊缝生锈、裂纹出现和螺栓松动等设备缺陷,一般仍由专业工人定期检测、维修和保养,既耗费人力,存在漏检、错检的可能性,且无法达到持续的实时性。用CV辅助塔吊缺陷和损耗的检测,克服了人工检测的局限,但目前仍缺少高精度的缺陷检测模型,难以对塔吊构件缺陷进行定量判断;对于管理制度的执行和改进更依赖于工作人员的行动、知识和经验。

图7 与塔吊事故深层次原因对应研究关注度分布
未来若能在设备缺陷和管理制度上利用ICT展开研究,可以弥补现有研究的不足,提升塔吊安全管理的水平。
3.5.3 研究总结
传统建筑工地监控记录系统仅是简单记录塔吊施工运行过程,不仅需要大量的人工干预,且难以达到良好的安全防范效果。
基于嵌入式平台的塔吊安全监控系统开创了塔吊安全管理智能化的先河,减少了塔吊管理的人工干预。但是受制于其设备运算能力,监控系统的准确性和应用的广泛性还有待提高。
随之,有学者提出使用BIM技术结合WSN技术进行塔吊的管理,实现了实时采集、精准定位、传输快速和可视化的安全管理功能。但由于传感器的布设成本较高,且布设会影响项目的执行,因此限制了其长远的发展。
CV技术在工程领域的应用研究经历了很长一段时间的探索,并在缺陷检查[37]、安全监测[38]和性能分析[39]方面取得了卓越的研究成果[40]。但使用CV技术进行提升塔吊安全管理的研究相对较少,相关研究与应用检测范围较局限,系统参数的准确性和算法的鲁棒性有待提升。塔吊的安全监控涉及多环节和多构件的状态判定,对CV技术而言仍是很大地挑战。
4 讨论与展望
4.1 基于ICT的塔吊安全管理目标建立
从现有的塔吊安全管理研究中发现,未来的研究应该利用ICT,从经验管理向智能化、自动化管理升级。在技术更新的同时还需注意在塔吊事故致因模型与塔吊安全管理之间寻求最佳的平衡,最大化完善塔吊事故致因模型各个屏障,实现“全方位、全过程”“精细化”“自学习改进”“实时响应”和“人机协同”5大管理目标。
4.1.1 全方位全过程
塔吊使用周期长,任何环节出现纰漏都将引起严重的安全隐患。在其使用过程中,应做好全过程、全方位管理工作,规范每一个环节,完善每一项内容。结合塔吊事故致因理论,未来的塔吊安全管理系统应能最大化地填补各个屏障的漏洞,实现塔身、塔臂、吊钩等构件和人员的全方位监测,以及安装、作业和拆卸等阶段的全过程管理。
4.1.2 精细化
塔吊结构复杂、构件繁多,其安全管理包含人员、物体、过程等多个方面,所以必须从传统建筑行业的粗放型管理转向精细化管理。利用计算机代替人工操作,避免人为因素造成对塔吊管理的不确定性,提高管理精度和效率。
4.1.3 自学习改进
拥有自学习能力的安全管理系统可以不断利用被采集的信息推测出新的不安全状态发生条件,完善现有管理知识,逐渐摆脱依赖管理人员隐性知识经验进行健全和完善管理制度的现状,持续提升塔吊安全管理的智能化水平。
4.1.4 实时响应
施工现场情况复杂多变,事故往往瞬间发生,所以安全系统的实时响应十分重要。安全管理系统实时通知管理人员并在特定条件下发出预警,形成“发现-分析-预警-处理-反馈-学习”的完整流程。
4.1.5 人机协同
将现场施工人员与塔吊机械关联,协同工作。例如识别塔吊工作姿态为现场施工人员划定安全工作区域。人机协同目标可以将人机关系从“人控制机械”向“人机联动”转换,开启人机协作建造的新可能。
4.2 基于BIM与计算机视觉的塔吊安全管理优势
随着BIM研究的逐步深入,可以利用其更好地整合管理信息,不断完善现有管理制度,减少塔吊事故致因理论中的管理制度的漏洞,阻止事故的发生。2015年,目标检测算法Faster-RCNN的出现,将深度学习在目标检测领域的应用推向了一个新高度,以此为理论基础,出现了如Mobile-Net,YOLO和Center-Net等分类算法。这些算法在检测速度和精度上均有了极大地提升,在恰当的应用场景下,识别准确率高达98%以上。同时基于深度学习的CV技术无论是在检测精度还是算法鲁棒性,都远远优于传统图像处理方法。所以将CV深度学习方法引入建筑工程管理领域的塔吊目标检测,是极具应用前景的研究方向。CV可以替代大多数人工监测的工作,连续不间断地监控物体,可增强在事故致因理论的设备缺陷、工作环境和个人行为3个屏障的管理效果。
技术层面上,基于WSN技术的相关研究存在依赖传感器的弊端,CV技术可在施工现场原有视频监控的基础上进行拓展,其安装成本低、维护方便,在监测过程中无需与观测对象接触,不影响被观测者正常工作等优点。BIM技术具有信息集成功能,CV技术则具有强大的感知、认知、数据分析处理和学习功能,二者结合可以提供嵌入式设备和WSN技术无法比拟的优势。同时,在事故致因理论方面,大多数研究尚未覆盖事故致因理论的各个环节。BIM结合CV的方案不仅可以在事故致因理论每一个环节都发挥相应的作用,且具备实现塔吊安全管理目标的能力,促使塔吊安全管理水平实现大幅度提升。
4.3 基于ICT技术的塔吊安全管理系统框架
为了实现塔吊安全管理目标,弥补现有塔吊安全管理研究的不足,可以将ICT中的BIM和CV技术相结合,以开发塔吊事故安全预警系统。
4.3.1 框架结构
如图8所示,该系统框架由BIM,CV和现有规则3大模块构成,利用BIM平台成熟的数据交互功能进行API的对接和整合,以实现不规范作业的行为检测、实时定位监控和危险预警功能。
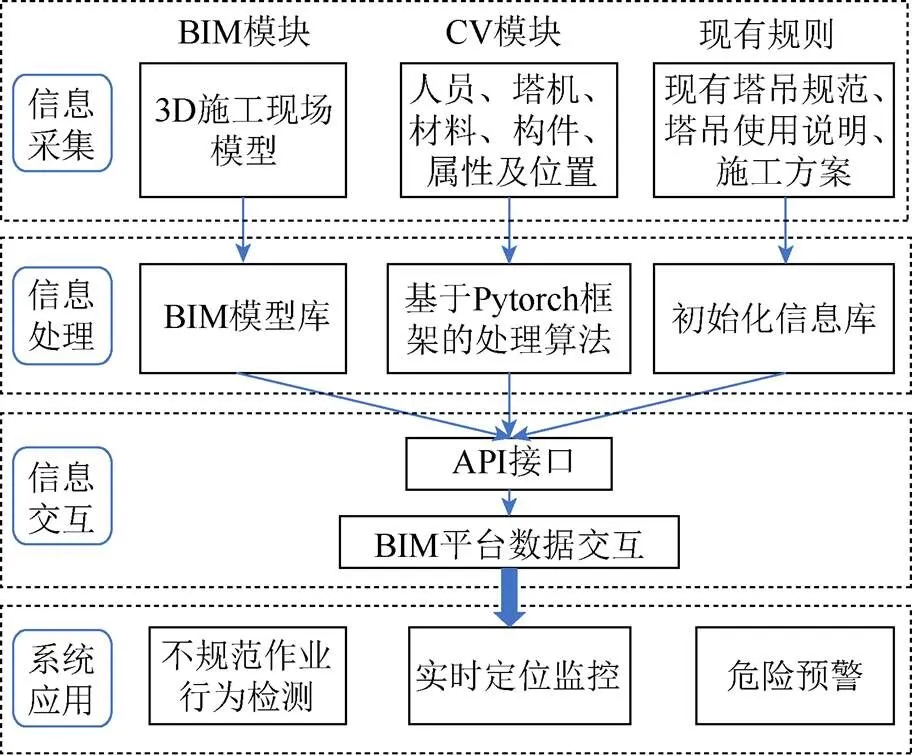
图8 基于BIM与CV的塔吊事故安全预警系统
4.3.2 技术手段
(1) 利用BIM技术的数据集成功能,建立施工现场布置的三维动态模型并进行实时更新。利用BIM平台数据交互功能,可以直观地掌握施工现场各类建筑物及设施的布置情况,实现对施工场地的动态管理。
(2) 利用深度学习框架搭建自定义的神经网络,对物体进行检测分类,实现不规范作业行为的检测、现场工人及物体的实时定位监控。引入目标检测算法,通过端对端的算法,无需额外处理,直接将现场视频或图像数据输入神经网络进行识别,得到目标的种类及位置信息。
目标检测领域的算法已经从双阶段的算法(RCNN-fastRCNN-fasterRCNN)发展到更快、更精确的单阶段算法(YOLOv1-v5)。在工程应用研究领域,已有学者提出一种名为video2entities[41]的新颖框架,该框架将通用知识图谱当作先验信息结合零样本学习(zero shot learning,ZSL)技术多次迭代去发现新的实体,再更新到知识图谱中。其研究表明利用ZSL技术可以在传统目标检测任务的基础上,实现对未知目标的检测任务,有效提升目标检测算法的学习能力。
利用目标检测算法识别出目标,实现实时定位监控,另外在检测识别出吊物种类后,可进一步精确计算其体积。再根据预先建立的建材密度数据库进行重量计算,从而确认吊物是否符合起吊标准,进行塔吊作业的监测。
4.3.3 运行流程
该系统在现有建筑工程规则库的基础上进行BIM模块和CV模块的运行。CV模块不仅可以实现施工现场人和物的实时定位,还可以监控塔吊操作人员的不规范作业行为。BIM模块将施工现场进行可视化显示,生成危险区域,并计算人员和危险区域的距离。结合现代土木工程知识,制定预警规则,当危险达到阈值时,系统将预警信号实时反馈给现场管理人员,提醒相关人员采取措施,以此减少施工现场塔吊事故的发生。
5 结 论
本文对基于ICT的塔吊安全管理研究现状进行了梳理分类和总结。列举了常见的塔吊事故类型及其直接原因,并将塔吊安全事故和事故奶酪模型进行实际结合,提出了塔吊事故致因模型及发生事故的深层次原因。对现有研究进行了分析,得出研究的4个技术发展阶段、对象及技术方案,并且将现有研究与塔吊事故致因理论对应得出研究关注度分布,指出了现有研究对象的空白区域和未来研究可继续深入之处。
此外,本文展望了未来塔吊安全管理的5个目标,并根据其目标提出了基于BIM与CV技术结合的塔吊安全管理框架。ICT在塔吊的安全管理领域已经取得了卓越的成绩,但仍然存在一定瓶颈,有待进一步发掘。将有潜力的BIM与CV技术融入塔吊安全管理框架,充分发挥其技术优势,并卓有成效地提高塔吊安全管理效率,促进我国工程建设事业的健康发展,创造更多的社会经济效益。
[1] 赵挺生, 胡俊杰, 师玉栋, 等. 基于FRAM的塔吊作业系统安全管理分析[J]. 工程管理学报, 2020, 34(6): 131-136.
ZHAO T S, HU J J, SHI Y D, et al. Safety management analysis of tower crane operation system based on FRAM[J]. Journal of Engineering Management, 2020, 34(6): 131-136 (in Chinese).
[2] 唐凯, 陈陆, 张洲境, 等. 我国建筑施工行业生产安全事故统计分析及对策[J]. 建筑安全, 2020, 35(9): 40-43.
TANG K, CHEN L, ZHANG Z J, et al. Statistical analysis and countermeasures of production safety accidents in our country's construction industry[J]. Construction Safety, 2020, 35(9): 40-43 (in Chinese).
[3] 李晓东, 陈琦. 我国建筑生产安全事故的主要类型及其防范措施[J]. 土木工程学报, 2012, 45(S2): 245-248.
LI X D, CHEN Q. Main types and prevention measures on construction production safety accidents in China[J]. China Civil Engineering Journal, 2012, 45(S2): 245-248 (in Chinese).
[4] REASON J. Human error: models and management[J]. BMJ: Clinical Research Ed, 2000, 320(7237): 768-770.
[5] 张潇, 张伟. 塔式起重机安全事故统计分析[J]. 工业安全与环保, 2019, 45(9): 24-29.
ZHANG X, ZHANG W. Statistical analysis of tower crane safety accidents[J]. Industrial Safety and Environmental Protection, 2019, 45(9): 24-29 (in Chinese).
[6] 余群舟, 孙博文, 骆汉宾, 等. 塔吊事故统计分析[J]. 建筑安全, 2015, 30(11): 10-13.
YU Q Z, SUN B W, LUO H B, et al. Statistical analysis of tower crane accidents[J]. Construction Safety, 2015, 30(11): 10-13 (in Chinese).
[7] 张南庆. 塔式起重机安全监控系统的研究与实现[D]. 重庆: 重庆大学, 2014.
ZHANG N Q. Research on monitoring system for tower crane's safety[D]. Chongqing: Chongqing University, 2014 (in Chinese).
[8] 杨山虎. 基于嵌入式ARM9平台的塔式起重机图像监控系统设计与实现[D]. 上海: 上海交通大学, 2010.
YANG S H. Design and implimentation of a surveillance system for tower cranes based on ARM9 embedded system[D]. Shanghai: Shanghai Jiao Tong University, 2010 (in Chinese).
[9] 张兵. 基于ARM的塔式起重机智能监测与防护系统研究[D]. 长沙: 中南大学, 2010.
ZHANG B. Research on intelligent monitoring and protection system of tower crane based on ARM[D]. Changsha: Central South University, 2010(in Chinese).
[10] 刘俊亮. 基于ARM的塔机防倾翻监控仪的研究与设计[D]. 青岛: 中国海洋大学, 2013.
LIU J L. The research and design of tower crane anti-tipping monitor based on ARM[D]. Qingdao: Ocean University of China, 2013 (in Chinese).
[11] 王旭. 塔吊视频监控系统设计[D]. 南京: 南京信息工程大学, 2014.
WANG X. Design of tower crane video monitoring system[D]. Nanjing: Nanjing University of Information Science & Technology, 2014 (in Chinese).
[12] 张建平. BIM在建设工程中演绎不凡[J]. 中国公路, 2016(20): 52-54.
ZHANG J P. BIM plays an extraordinary role in construction projects [J]. China Highway, 2016(20): 52-54 (in Chinese).
[13] 侯宇. 基于BIM与WSN技术的塔吊安全事故预警的理论与方法研究[D]. 徐州: 中国矿业大学, 2017.
HOU Y. Research on the theory and method of early warning for safety accident of tower crane based on BIM and WSN[D]. Xuzhou: China University of Mining and Technology, 2017 (in Chinese).
[14] CHAE S, YOSHIDA T. Application of RFID technology to prevention of collision accident with heavy equipment[J]. Automation in Construction, 2010, 19(3): 368-374.
[15] LEE G, CHO J, HAM S, et al. A BIM- and sensor-based tower crane navigation system for blind lifts[J]. Automation in Construction, 2012, 26: 1-10.
[16] 郭红领, 于言滔, 刘文平, 等. BIM和RFID在施工安全管理中的集成应用研究[J]. 工程管理学报, 2014, 28(4): 87-92.
GUO H L, YU Y T, LIU W P, et al. Integrated application of BIM and RFID in construction safety management[J]. Journal of Engineering Management, 2014, 28(4): 87-92 (in Chinese).
[17] 刘文平. 基于BIM与定位技术的施工事故预警机制研究[D]. 北京: 清华大学, 2015.
LIU W P. The schematic studies of construction accident warning system based on BIM and positioning technology[D]. Beijing: Tsinghua University, 2015 (in Chinese).
[18] 江帆. 基于BIM和RFID技术的建设项目安全管理研究[D]. 哈尔滨: 哈尔滨工业大学, 2014.
JIANG F. Research on the construction project safety management based on the BIM and RFID technology[D]. Harbin: Harbin Institute of Technology, 2014 (in Chinese).
[19] ZHONG D, LV H, HAN J, et al. A practical application combining wireless sensor networks and internet of things: safety management system for tower crane groups[J]. Sensors, 2014, 14(8): 13794-13814.
[20] FANG Y H, CHO Y K, CHEN J D. A framework for real-time pro-active safety assistance for mobile crane lifting operations[J]. Automation in Construction, 2016, 72: 367-379.
[21] LI H, DONG S, SKITMORE M, et al. Intrusion warning and assessment method for site safety enhancement[J]. Safety Science, 2016, 84: 97-107.
[22] 张彬彬. 基于BIM与WSN技术的塔吊安全管理实施监测与预警系统研究[J]. 项目管理技术, 2018, 16(6): 46-51.
ZHANG B B. Research on safety management system of tower crane in real-time monitoring and early warning based on BIM and WSN technology[J]. Project Management Technology, 2018, 16(6): 46-51 (in Chinese).
[23] 谢晨晨, 刘欣. 基于BIM和定位技术的塔吊安全事故预警[J]. 建筑安全, 2020, 35(11): 34-38.
XIE C C, LIU X. Safety accident warning of tower crane based on BIM and positioning technology[J]. Construction Safety, 2020, 35(11): 34-38 (in Chinese).
[24] 鲍跃全, 李惠. 人工智能时代的土木工程[J]. 土木工程学报, 2019, 52(5): 1-11.
BAO Y Q, LI H. Artificial Intelligence for civil engineering[J]. China Civil Engineering Journal, 2019, 52(5): 1-11 (in Chinese).
[25] YIN H M. Detecting tower crane with multi-features[J]. Applied Mechanics and Materials, 2014, 488-489: 854-857.
[26] 孙宏军,赵作霖,徐冠群. 塔吊机器视觉监控系统设计[J]. 传感器与微系统, 2016, 35(8): 70-73.
SUN H J, ZHAO Z L, XU G Q. Design of computer vision surveillance system for tower cranes[J]. Transducer and Microsystem Technologies, 2016, 35(8): 70-73 (in Chinese).
[27] FANG Y H, CHEN J D, CHO Y K, et al. Vision-based load sway monitoring to improve crane safety in blind lifts[J]. Journal of Structural Integrity and Maintenance, 2018, 3(4): 233-242.
[28] 汪涛, 张建德. 基于深度学习的起重机吊运手势识别[J]. 现代电子技术, 2018, 41(23): 127-129, 133.
WANG T, ZHANG J D. Craneʹs lifting gestures recognition based on deep learning[J]. Modern Electronics Technique, 2018, 41(23): 127-129, 133 (in Chinese).
[29] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE Press, 2016: 779-788.
[30] SHAIFEE M J, CHYWL B, LI F, et al. Fast YOLO: a fast You only look once system for real-time embedded object detection in video[EB/OL]. (2017-10-14) [2021-03-15].https:// openjournals.uwaterloo.ca/index.php/vsl/article/view/171.
[31] 张锐. 基于机器视觉的塔式起重机控制策略研究[D]. 合肥: 合肥工业大学, 2019.
ZHANG R. Study on control strategy of tower crane based on machine vision[D]. Hefei: Hefei University of Technology, 2019 (in Chinese).
[32] 申耀华. 基于机器视觉的拼装结构件焊缝表面缺陷检测算法研究[D]. 天津: 天津理工大学, 2019.
SHEN Y H. Research on detection algorithms of weld surface defects based on machine vision for assemble structural parts[D]. Tianjin: Tianjin University of Technology, 2019 (in Chinese).
[33] YANG Z, YUAN Y B, ZHANG M Y, et al. Safety distance identification for crane drivers based on mask R-CNN[J]. Sensors, 2019, 19(12): 2789.
[34] KANG S, WANG H B. Crane hook detection based on mask R-CNN in steel-making plant[J]. Journal of Physics: Conference Series, 2020, 1575: 012151.
[35] LUO H, WANG M Z, WONG P K Y, et al. Full body pose estimation of construction equipment using computer vision and deep learning techniques[J]. Automation in Construction, 2020, 110: 103016.
[36] 黄宏安, 陈国栋, 张神德. 深度学习在塔吊裂缝识别中的应用[J]. 佳木斯大学学报: 自然科学版, 2021, 39(1): 13-16.
HUANG H A , CHEN G D , ZHANG S D. Application of deep learning in crack identification of tower crane[J]. Journal of Jiamusi University: Natural Science Edition, 2021, 39(1): 13-16 (in Chinese).
[37] KOCH C, GEORGIEVA K, KASIREDDY V, et al. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure[J]. Advanced Engineering Informatics, 2015, 29(2): 196-210.
[38] SEO J, HAN S, LEE S, et al. Computer vision techniques for construction safety and health monitoring[J]. Advanced Engineering Informatics, 2015, 29(2): 239-251.
[39] GONG J, CALDAS C H. Computer vision-based video interpretation model for automated productivity analysis of construction operations[J]. Journal of Computing in Civil Engineering, 2010, 24(3): 252-263.
[40] ZHONG B T, WU H T, DING L Y, et al. Mapping computer vision research in construction: developments, knowledge gaps and implications for research[J]. Automation in Construction, 2019, 107: 102919.
[41] PAN Z L, SU C, DENG Y C, et al. Video2Entities: a computer vision-based entity extraction framework for updating the architecture, engineering and construction industry knowledge graphs[J]. Automation in Construction, 2021, 125: 103617.
Information communications technology assisted tower crane safety management-review and prospect
DUAN Rui1, DENG Hui1, DENG Yi-chuan1,2
(1. School of Civil Engineering and Transportation, South China University of Technology, Guangzhou Guangdong 510640, China;2. State Key Laboratory of Subtropical Building Science, Guangzhou Guangdong 510640, China)
Tower cranes are the most frequently used vertical transportation tools in construction projects. Due to the high operating risks of tower cranes, it remains urgent to improve its safety management level in the industry. In recent years, information and communication technology (ICT) has gradually been applied to the safety management of tower cranes, but the current applications in this field are mostly single-point development, and the level of intelligence is low, which fails to meet the existing safety management requirements of tower cranes. By investigating the relevant literature in the field of tower crane safety management in the past decade, the current research status of tower crane safety management by domestic and foreign scholars was sorted out and summarized, and analyses were made on the object, core technology, attention, and advantages and disadvantages of the existing research. In addition, through the analysis of the existing methods, objectives and framework were proposed for the future tower crane safety management. The potential building information modeling (BIM) and computer vision (CV) in ICT were integrated into the tower crane safety management framework, so as to realize the real-time monitoring and early risk-warning of the tower crane operation process, and to effectively reduce the occurrence of accidents. The proposed framework is expected to promote the intelligentization and informatization of the tower crane safety management, and to provide some inspiration for the healthy development of construction engineering.
tower crane; safety management; building information modeling; computer vision technology; construction accident
21 May,2021;
TP 391
10.11996/JG.j.2095-302X.2022010011
A
2095-302X(2022)01-0011-10
2021-05-21;
2021-06-16
16 June,2021
广东省自然科学基金项目(2018A030310363,2017A030313393);广州市科技计划项目重点项目(20181003SF0059);亚热带建筑科学国家重点实验室自主课题(2017KB12)
s:Natural Science Foundation of Guangdong Province (2018A030310363, 2017A030313393); Key Project of Guangzhou Science and Technology Plan Project (20181003SF0059); Independent Project of State Key Laboratory of Subtropical Building Science (2017KB12)
段 锐(1998–),男,硕士研究生。主要研究方向为建筑信息模型、计算机视觉。E-mail:khalilduan@163.com
DUAN Rui (1998–), master student. His main research interests cover BIM, CV. E-mail:khalilduan@163.com
邓逸川(1989–),男,助理教授,博士。主要研究方向为建筑信息模型、计算机视觉。E-mail:ctycdeng@scut.edu.cn
DENG Yi-chuan (1989–), assistant professor, Ph.D. His main research interests cover BIM, CV. E-mail:ctycdeng@scut.edu.cn
