基于特征的地铁门与安全门间隙异物检测方法
2022-03-19张嘉超
张嘉超,张 伟
(1. 南京工程学院人工智能产业技术研究院, 江苏 南京 211167;2. 南京康尼机电股份有限公司, 江苏 南京 210009)
轨道交通作为公共交通的重要载体,是城市社会经济快速发展的坚实基础之一.随着城市轨道交通线路的快速增长以及轨道行业的高速发展,一些问题逐渐显现,其中安全运营问题最受关注.目前我国城市轨道交通站点安全门与地铁车门间存在150~340 mm不等的间隙[1-2],当乘客在客流量大或者非正常拥挤进入即将关闭的地铁车门时,此间隙存在人或物被夹挤/遗留在两门之间的可能性.为避免上述事故发生,国内轨道交通领域利用在安全门与地铁车门之间增加防夹装置进行安全防范[3-4],除投入使用的防夹挡板、防爬架等物理防夹装置外,还通过一些自动检测技术进行障碍物检测.目前地铁车门和安全门之间的异物入侵检测主要采用基于红外光幕探测仪、激光扫描仪以及计算机视觉的检测方法等[5-7].
特征提取和匹配广泛应用于计算机视觉领域的目标检测、全景成像等实际应用中[8].本文提出一种基于关键特征匹配的地铁车门与安全门间隙的异物检测方法,采用加速稳健特征(speeded up robust features,SURF)算法对检测图像与参考图像进行特征提取与匹配后,对特征匹配对中的误匹配点进行有效剔除,提炼出用于后续异物检测的关键匹配点;借助关键匹配特征点相对数量及特征点分布面积等信息对检测区域进行异物检测.
1 SURF算法原理
SURF 算法是一种稳健的局部特征点检测和描述算法,是对尺度不变特征转换(scale-invariant feature transform,SIFT)算法的改进,在特征提取任务中具有较好性能[9].通过简化Hessian矩阵行列式中的高斯二阶微分模板以降低计算消耗[6],SURF算法在保持尺度和旋转不变性的同时,降低了算法计算成本,为算法在实时计算机视觉系统中的应用提供了可能.SURF算法大致分为特征点定位、特征描述子选取以及特征点匹配三部分.本文采用SURF算法对地铁车门与安全门间隙的异物视频监控图像进行特征提取,进而实现异物入侵检测.
1.1 特征点定位
SURF算法采用Hessian矩阵进行特征提取,Hessian矩阵可以生成稳定的边缘点以便于图像特征提取.在进行Hessian矩阵构造前,需要先对图像进行高斯滤波,通常选用标准的二阶高斯函数作为滤波器.对于图像I中像素点(x,y),其对应的Hessian矩阵为:
(1)
H(x,y,δ)的行列式值为:
(2)
为减小计算量、提高运算速度,SURF算法采用盒式滤波器来近似代替高斯滤波器.盒式滤波器通过将高斯滤波器的滤波权重系数简化,将图像的卷积运算简化为计算图像不同区域间像素和的加减运算.具体而言,SURF算法只使用{-2,-1,0,1}集合中元素来设计盒式滤波器,将整体计算过程简化.经盒式滤波器滤波后,式(2)可简化为:
det(Happrox)=DxxDyy-(wDxy)2
(3)

在获得Hessian矩阵后,采用不断增大盒式滤波模板尺寸的方法来获得不同尺度的图像,由此构建尺度空间.SURF算法尺度空间分为四组,每组包含四层.每组四层的滤波模板尺寸按照给定的步长增加,第一组到第四组层间滤波模板尺寸分别按6、12、24、48的步长增加.具体而言,SURF算法采用9×9的滤波模板作为起始尺寸对图像进行滤波,其结果作为初始的尺度空间层,即第一组第一层滤波模板尺寸为9×9,根据第一组给定步长增量,第一组四层滤波模板尺寸分别为9×9、15×15、21×21、27×27;第二组第一层滤波模尺寸为第一组第二层板滤波模板大小,根据对应的步长增量,第二组的四层滤波模板尺寸分别为15×15、27×27、39×39、51×51;以此类推,第三组和第四组的四层滤波模板尺寸分别为27×27、51×51、75×75、99×99和51×51、99×99、147×147、195×195.在该算法的尺度空间中,每组任意一层包含三种盒式滤波器.
对图像I进行滤波后,通过Hessian行列式计算式(3)可以得到对应尺度坐标下的Hessian行列式值,所有的行列式值可以构成一幅Hessian行列式图像.SURF算法在尺度空间中选取一个3×3×3的邻域空间进行特征点选取,中间层的每个Hessian行列式值作为特征候选点.将每个特征候选点与本层及相邻两层点的Hessian行列式值进行比较,若该点的值大于其他26个点,则认为该点是特征点.在实际应用中,为保证特征点的数量及准确性,一般会选取一个给定阈值,行列式值高于阈值的点被认定为特征点.
1.2 特征描述子选取
每个特征点被分配一个主方向以保证特征向量的旋转不变性,特征点主方向也是该点周围灰度变化最明显的方向.以特征点为中心,半径为6ε(ε为特征点的尺度)的范围内计算水平与垂直方向上的Haar小波响应,并将水平与垂直方向上的Haar小波响应值进行加权求和.在此基础上,以特征点为中心设置一个角度为π/6的扇形滑动窗口,随着滑动窗口的移动,统计当前窗口内小波响应累加值,构成一个小波响应矢量.总和最大的小波响应矢量方向为该特征点的主方向.
特征点主方向确认后,以特征点为中心选定边长为20ε的正方形区域,沿着该特征点主方向将正方形区域划分为4×4的子区域.在每个子区域选取5×5个均匀分布的采样点,计算其沿主方向与垂直于主方向的Haar小波响应值(滤波器大小2ε),并对相应方向的小波响应进行高斯加权计算,每个子区域可得到一个4维特征矢量.因此,特征描述子由一个4×4×4维的特征矢量构成.SURF特征描述子具备尺度和旋转不变性,且对光照变化具有鲁棒性.
1.3 特征点匹配
在进行特征点定位时,将计算得到的Hessian矩阵的迹根据符号(正负)特征点分为两组.特征点只在同组内进行匹配,若待匹配的两个特征点在同一组,则计算两个特征点描述子的欧氏距离:
人民调解协议司法确认,是我国《人民调解法》和《民事诉讼法》共同规定的一项法律制度,是指人民法院依据双方当事人的申请,对其在人民调解委员会主持调解下达成的调解协议进行司法审查,依法赋予该人民调解协议司法强制执行力的活动。根据相关法律和司法解释的规定,申请人民调解协议司法确认,双方当事人应当在达成调解协议后30天内,共同向人民法院提出申请。人民法院受理后,指定一名审判人员进行司法审查。经审查,认为符合法律规定的,予以司法确认;不符合法律规定的,不予确认。
(4)
式中:Xik为参考图像第i个特征点描述子的第k个元素;Yjk为目标图像第j个特征描述子的第k个元素;n为描述子的维数.
通常会将欧式距离与选定阈值比较,若小于选定阈值则认为该组特征点为一组匹配点,反之则剔除.但这种方法会导致产生大量误匹配点,可采取最邻近距离比值法 (nearest neighbor distance ratio,NNDR)等方法来消除错误匹配[10].
2 基于特征的间隙异物检测方法
本文提出一种基于SURF特征提取与匹配算法的地铁车门与安全门间隙的异物检测方法,算法框架如图1所示.首先将参考图像及待检测视频帧中的待检测区域(地铁车门与安全门间隙)划分为N个子块(一般而言,N=4或者N=8),分别对子块进行特征提取;然后将对应子块进行特征匹配,得到的特征匹配点数及匹配点所处位置将用于后续异物检测.由于直接通过SURF算法进行特征匹配易产生误匹配点,因此提出一种简单、有效的误匹配点剔除方法,以得到较为准确的特征点匹配对.

图1 本文提出方法框架图
2.1 误匹配点剔除
NNDR算法依据局部区域临近特征点区分度低理论,通过计算特征描述子之间的最小欧式距离Di,j与次小欧式距离Di,j′比值来筛除误匹配点,计算式为:
(5)
将得到的比值η与设定阈值ηε(一般而言,ηε为0.4~0.7)比较,若η>ηε,则该特征对为误匹配对.在采用NNDR算法剔除误匹配点后,会存在参考图像中一个特征点和目标图像的多个特征点相匹配情况,在实际应用过程中需进一步对一对多中的误匹配对进行删除.
假定参考图像中的第t个特征点Xt在目标图像中对应的匹配点有Ym、Ym+1、Ym+2、…、Ym+n.在NNDR算法中,已求取最小欧式距离匹配点,Ys=argmin{dist(XtYm),dist(XtYm+1),…,dist(XtYm+n)}(s∈(m,m+n);同理,存在次小欧式距离匹配点Ys′(s′≠s∈(m,m+n)).进行如下计算:
(6)
式中:(xs,ys)为Ys像素坐标;(xs′,ys′)为Ys′像素坐标;(xi,yi)为Yi像素坐标;i∈(m,m+n)且i≠s≠s′.
将所得比值θs,i与设定阈值θε进行比较,若θs,j>θε,则该特征点为误匹配点;若θs,j≤θε,则该匹配点作为有效匹配点.
2.2 异物检测
分块后的异物检测区域经过对应的特征提取与匹配及误匹配点删除后进行异物检测,流程如图2所示.对于参考图像中的检测块Ao(o∈(1,N))和目标图像中的检测块Bo(o∈(1,N)),经过特征提取与匹配以及误匹配点删除后可得到特征点数目po(也可称之为匹配对数目),将其与标准参考值pκ进行比较,pκ根据待检测视频初始帧(无异物状态)与参考图像进行特征匹配以及误匹配点删除后得出.若po<αpκ(α为可调系数),则认定该匹配块有异物,反之则进行特征点面积分布检测.
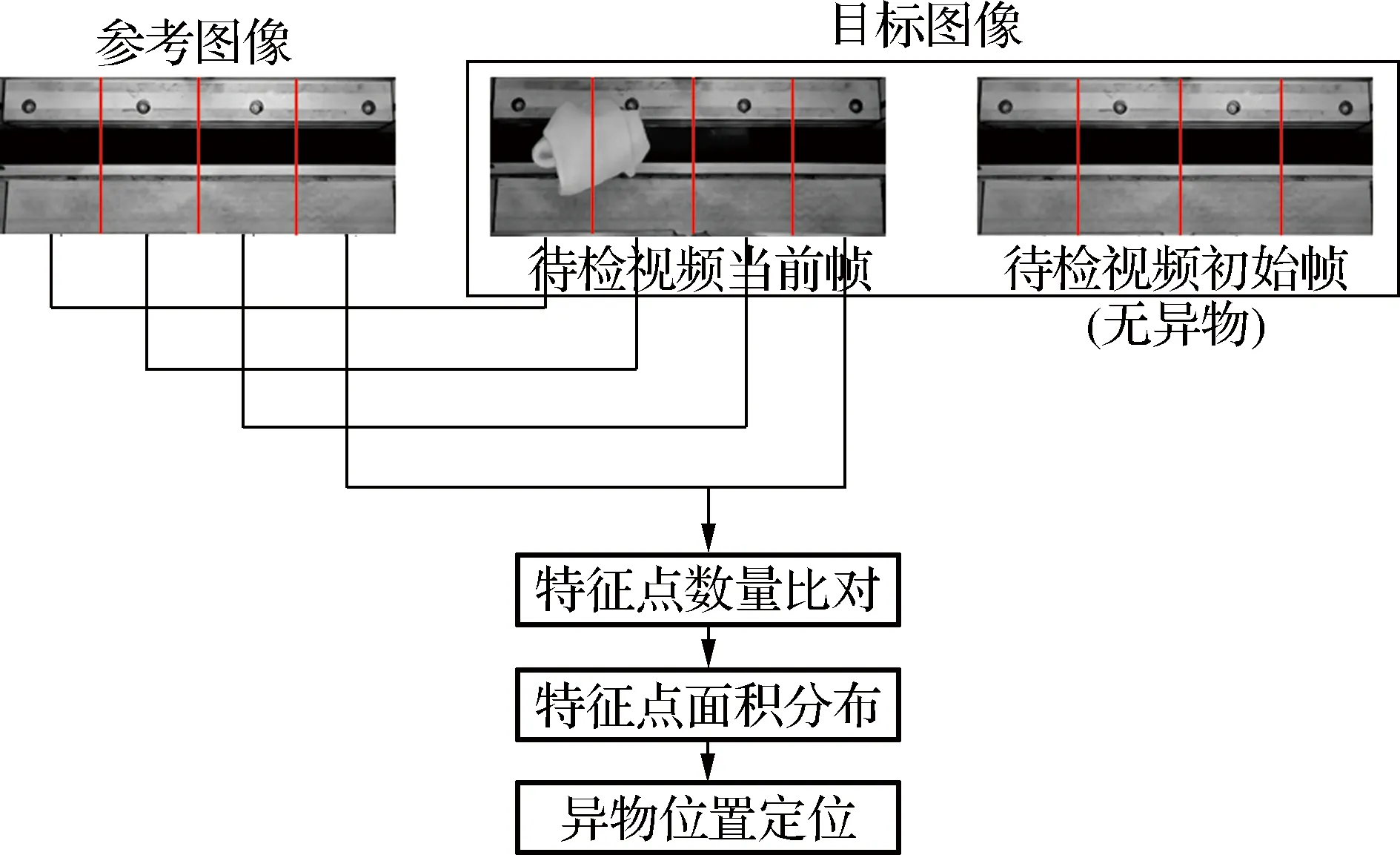
图2 异物检测流程
检测块中的特征点分布面积可以通过计算边缘特征点组成的多边形面积计算获取,pk(k=1,2,…,M)为特征点边界正向排列的顶点,对应的坐标点为(x1,y1)、(x2,y2)、…、(xM,yM),计算公式为:
(7)
将所得的特征点分布面积PΩ与标准参考值PΩ′进行比较,若PΩ<βPΩ′(其中:PΩ′为待检测视频初始无异物图像与参考图像进行特征匹配以及误匹配点删除后所得到的特征点(特征匹配对)的分布面积;β为可调系数),则认定该检测块存在异物,反之则表示该检测块不存在异物.
3 试验分析
为了验证所提出方法的有效性,采用本文方法对真实采集的图像进行异物检测试验.试验在Windows10系统的Matlab平台进行.试验对象地铁车门和安全门1∶1仿真系统由南京康尼机电股份有限公司提供.捕获检测视频的试验相机以30 fps拍摄,分辨率为1 920×1 080.为提升检测效率,从视频中每10帧均匀采样1帧进行检测,即每1目标帧的异物存在状态代表相邻10帧的检测结果.
图3为试验组一的参考图像与目标图像,方形框内为待检测分块区域,划分为4个检测子块(N=4).表1为各检测区域中的特征点数量比值与特征点面积分布比值.由表1可见,检测块1与检测块2的特征点数量比值与特征点面积分布比值均大于阈值0.7,因此该部分均判定为无异物入侵;检测块3与检测块4的特征点数量比值分别为0.422与0.102,均小于0.7,表明这两部分的特征点对比初始无异物时匹配对发生了大幅缩减,存在异物入侵的可能性大,根据算法判定该目标图像有异物存在,且异物存在于第3和第4检测块.
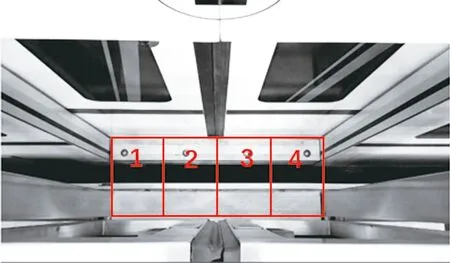
(a) 参考图像

(b) 目标图像

表1 试验组一异物检测结果( α=0.7,β=0.7)
图4为试验组二的参考图像与目标图像,同样将待检测区域划分为4个子块.表2为各检测区域中的特征点数量比值与特征点面积分布比值.由表2可见,检测块1和检测块4的特征点数量比值与面积分布比值均大于阈值,判定该区域无异物存在;检测块2特征点数量比值小于阈值,表示该部分特征点发生大幅缩减,存在异物入侵的可能;检测块3特征点数量比值大于阈值,但是特征点面积分布小于阈值,表明该部分特征点分布与无异物存在时分布差异较大,该目标图像的检测结果为存在异物,且存在于第2和第3检测块中.试验过程中为便于比较,特征点面积分布比值已经归一化处理.
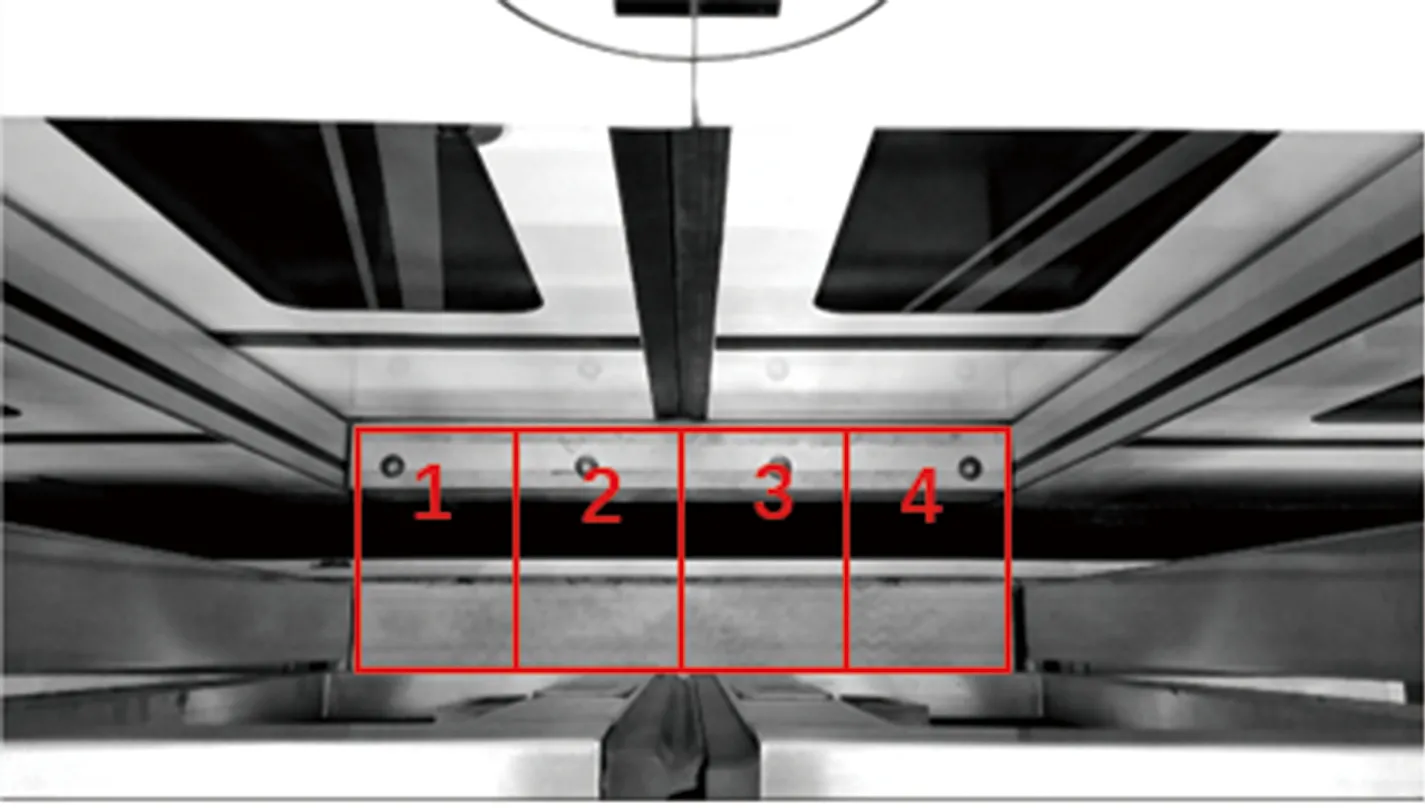
(a) 参考图像

(b) 目标图像
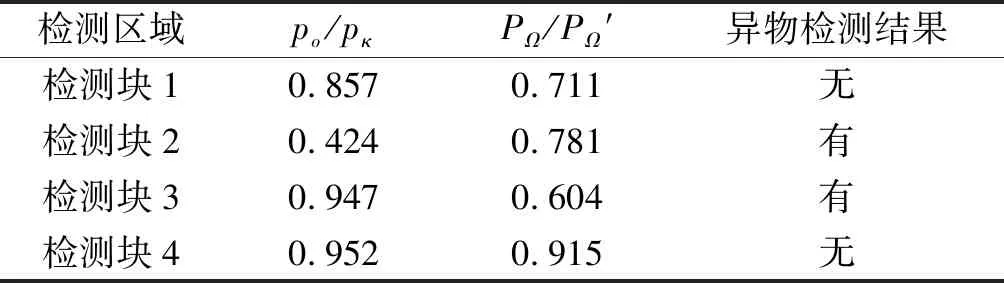
表2 试验组二异物检测结果(α=0.7,β=0.7)
由试验可知,本文算法可对地铁车门与安全门系统间的缝隙进行异物检测并能够完成初步定位,满足实际工程需要.但本文方法也具有一定的局限性,仅对较为明显的物体能够进行有效检测,对于较小的物体无法实现检测,这是由于算法依赖特征点检测,当异物相对于待检测区域所占面积比例很小时,特征点数量及分布面积几乎不会发生变化,因此无法进行有效检测.
4 结语
本文提出一种基于关键特征匹配的地铁车门与安全门间隙的异物检测方法.首先将待检测图像与参考图像进行特征提取与匹配;然后为提升匹配准确率,对特征匹配对中的误匹配点进行有效剔除,从而提炼出关键匹配点;最后借助匹配特征点相对数量及特征点面积分布对待检测区域进行异物检测.试验结果表明,本文方法可有效地对地铁车门与安全门间隙进行异物入侵检测,对于轨道交通安全运营具有一定的实际应用价值.
