一类基于Ether CAT的欠驱动系统伺服实验平台研制与测试验证
2022-03-18许东芳杨鹏程青先国李卓玥
许东芳 杨鹏程 青先国 李卓玥 肖 凯
(核反应堆系统设计技术重点实验室,四川 成都 610213)
0 引言
传统的Profibus、CANopen和Modbus等现场总线性能的限制决定了以往控制系统的架构,例如控制系统的位置环和速度环控制等都被设计在上位机里,现场总线只是用来传递相关控制算法的参数,如图1所示,到目前为止,只能实时控制伺服电机底层的位置环。但是,基于EtherCAT,可以实时控制伺服驱动电机底层的速度环和转矩环,从而实现智能控制算法。本文将介绍基于EtherCAT直驱一类欠驱动伺服系统,该系统可实时控制伺服驱动电机底层速度和输出转矩。另外,本文还将介绍一类欠驱动系统运行过程中液面晃动状况的检测系统,该检测系统可提供液面状况数据信息检测。利用伺服控制系统及试验平台对该类欠驱动系统的控制开展测试验证,可为今后工业机器人等工业现场的应用作好实验准备。

图1 伺服控制系统架构发展趋势
1 一类基于Eth e r CAT的欠驱动系统伺服实验平台研制
1.1 一类基于EtherCAT驱动的电机伺服平台研制
本文介绍的平台基于EtherCAT的主从框架,主要包括硬件、用户和内核三个层面,其中用户层面为用户提供了大量的接口,通过大量的适应性开发可实现伺服驱动系统的各种功能。硬件层面即指通过网络接口控制器底层伺服驱动设备相连接,来构建一个EtherCAT的网络系统。图2所示为基于EtherCAT的伺服控制系统。

图2 基于Ether CAT技术的主从框架
图1是最新发展趋势,即基于EtherCAT现场总线技术的直驱控制架构,图3为EtherCAT中CANopen的实现原理。传统的Linux系统内核只能达到一定软实时的要求,然后给用户提供基本的操作,不能保证硬实时。但是通过实时补丁,Linux系统内核可以实现硬实时。

图3 CANopen的实现原理
本文使用的开源主站可通过EtherCAT建立与底层伺服驱动设备的通信。通过设置EtherCAT相关字节使伺服系统运行为不同的模式,控制伺服系统底层设备的速度和转矩。另外,由于可以实现1 kHz的通信周期,因此可实现先进智能控制算法。
1.2 欠驱动系统状态信息检测系统开发
为了检测该类欠驱动系统运动过程中的一系列状态信息,即本文中的液体及贮液容器的运动状态信息,验证该欠驱动系统控制算法,开发了欠驱动系统状态信息检测系统。包括在欠驱动系统运行过程中周期性地捕获系统状态信息图像,校准工业相机各项外部参数,校正液体状态信息图像的畸变,以及后期处理液体状态信息图像。
该系统使用工业相机,在欠驱动系统运行时以每秒125帧的最快速度捕捉液体状态信息。对于图像失真问题,参考经典的张氏标定方法,根据工业相机的各项外部物理参数,矫正图像如图4所示。阈值分离后对校正后的图像进行预处理,经过一系列图像处理及运算,如图5所示,可得到其边缘信息,然后计算得到液体晃动信息,并通过映射计算液体的高度,得到液体晃动的方向。

图4 畸变校正前后图像对比

图5 欠驱动系统状态信息检测系统处理流程及示例
1.3 一类欠驱动伺服系统实验平台的开发
为了对EtherCAT通信技术及欠驱动实验平台的功能性能进行测试验证,研制了一种可实现快速运动的一类欠驱动伺服系统实验平台。该实验平台选用支持EtherCAT通信的山洋电气R2系列伺服系统,为了更好地将电机输出在欠驱动系统上,利用膜片联轴器与电机相连。一类欠驱动伺服系统实验平台如图6所示。
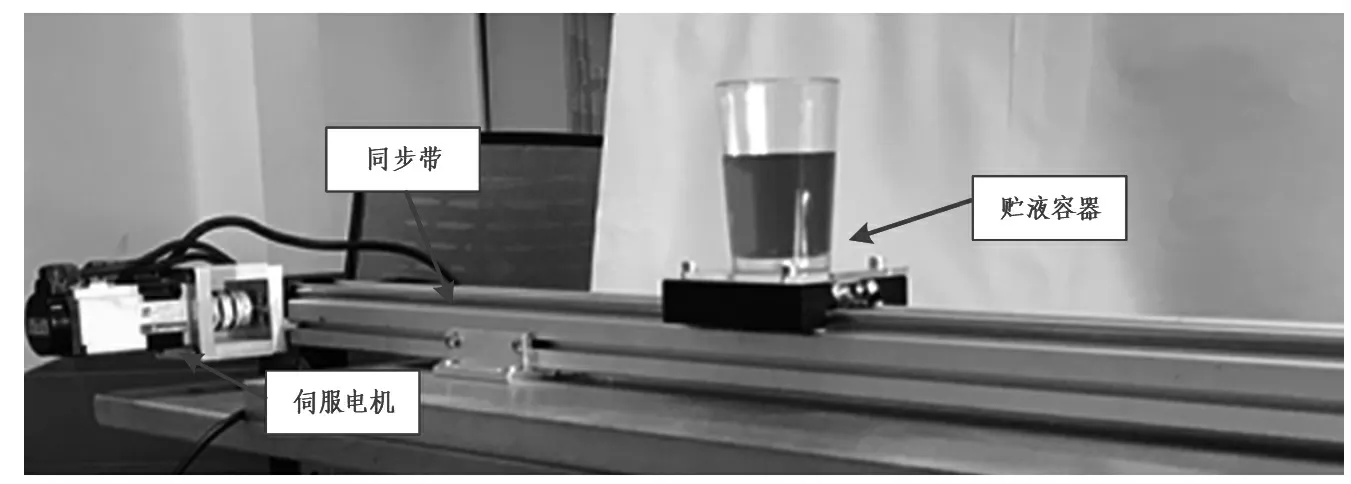
图6 一类欠驱动伺服系统实验平台
2 欠驱动系统控制算法验证
2.1 开放贮液容器液体晃动描述及实验设置
贮液容器中的溶液的晃动状态抑制的控制为一类典型欠驱动控制系统,通过控制贮液运动平台来控制容器中液体的运动状态。首先,在位置控制模式下,考虑欠驱动系统即贮液容器的运动情况。位置控制方式采用梯形速度规划。通过1.2节液体晃动状态信息检测系统的处理,可获得图7所示的实验结果,用其表征液体在运动过程中的晃动情况。

图7 位置控制模式下溶液晃动响应
图7所示的欠驱动系统中容器中液体的晃动情况主要是由于承载平台的加速度变化引起的。本文采取的速度控制流程如图8所示。

图8 欠驱动系统伺服实验平台控制流程
2.2 欠驱动系统实验平台及控制算法测试验证
该实验验证基于输入整形PID欠驱动系统控制方法(PID-ZVD)和欠驱动系统最优控制方法(LQRZVD)。由于本文主要考虑一类欠驱动系统实验平台的开发和基于EtherCAT的通信技术验证,欠驱动系统控制算法的推导和设计本文不再赘述。本实验中欠驱动伺服系统将采用周期速度控制的方式,控制频率最高为1 kHz,欠驱动系统控制方法在开发的基于EtherCAT的主站上执行,实验平台中的伺服电机驱动器为从站,构成主从控制模式。
图9为LQR-ZVD欠驱动系统控制方法和PIDZVD欠驱动系统控制方法的输出响应。其中LQRZVD欠驱动控制方法稳定时间显著增快且最大速度也更小。

图9 位置和速度响应
图10显示了PID-ZVD实验过程中液体晃动的状态。可以看到,贮液容器在开始移动时明显在晃动,随后逐渐稳定。LQR-ZVD实验过程中的液体晃动如下图11所示。

图10 PID-ZVD欠驱动系统控制方法的晃幅响应

图11 LQR-ZVD欠驱动系统控制方法的晃幅响应
测试结果显示,欠驱动运动过程中在保证运动速度的同时,晃动的幅度相较平缓,在开始运动后,液面就迅速趋于平缓,并且最大速度小,最大加速度也明显减小。
两种欠驱动系统控制方法都能很好的实现这一类欠驱动系统的控制目标,实现这一类欠驱动系统运动的控制,充分验证了本文实验平台的可用性以及EtherCAT通信技术的实时性和有效性。
3 总结与展望
开发的基于EtherCAT的一类欠驱动伺服系统实验平台实现了与伺服设备的EtherCAT通讯,以及底层伺服设备的速度环、转矩环的闭环控制,实现其1 kHz的通讯周期。研发的欠驱动系统状态信息检测系统及实验平台,实现了高速准确的液体输送和液体动态信息处理。实验验证和分析表明,基于EtherCAT的伺服系统实验平台满足实验要求,更好地实现了直接驱动控制和智能控制算法,为后续在工业现场的应用奠定了实验基础。