全自动多角度定点橄榄球踢球机器人的设计
2022-03-17翟丽红
翟丽红
(太原工业学院,山西太原,030008)
0 引言
随着计算机技术的发展,人工智能和智能机器人学科的理论及应用研究成为人工智能研究的热点。体育竞技不再仅仅是体力、技术的较量,也是高科技成果的较量[1]。随着机器人技术的不断进步,各种机器人陆续出现,机器人体育竞技比赛的发展成为机器人中的一项不可缺少的赛事[1]。机器人的球类运动把知识性和娱乐性融为一体,向人们提供了一个展示高科技成果的形象化窗口[2]。踢球机器人要求具有良好的动力学特性和踢球能力[1]。复杂的策略及算法和较高的速度及强大的踢球机构对机器人性能都非常重要。
在第19届ROBOCON全国大学生机器人大赛中出现了一种踢橄榄球机器人,与传统的规则球类相比橄榄球的特殊形状也决定了其机器人的特殊性[1]。
本文提供了一种以舵轮底盘为基础的全自动多角度定点橄榄球踢球机器人设计,利用仿生学对机器人结构进行设计,能够真正实现人和机器人的互动,可用于橄榄球运动训练、宣传以及性能测试。
1 踢球机器人
1.1 结构设计
如图1所示,本踢球机器人的结构设计模型包含12部分,各部分结构名称如表1所示。模型中,玻璃纤维底盘,用于连接机器人的各个结构,实现其整体移动。舵轮转向驱动是舵轮转向驱动力的来源。舵轮,作为机器人整体移动的动力来源,用于机器人的移动和方向调整。霍尔开关,可以在机器人启动时用于确定舵轮的初始位置。MAXON EC30电机,为踢球结构提供了动力。绝对值式编码器用于记录电机的转角,传输给控制系统。踢球结构实现机器人实现踢球功能。固定在玻璃纤维底盘上的全场定位系统,可以记录其相对位置定位。球座,盛放橄榄球的零件。捡放球座结构,配合球调整机构进行球姿态的调整及球和球座的捡放。球调整机构,调节橄榄球的姿态,提高踢球的命中率。车身角度记录系统 ,检测机器人的整体转角,反馈给控制系统。
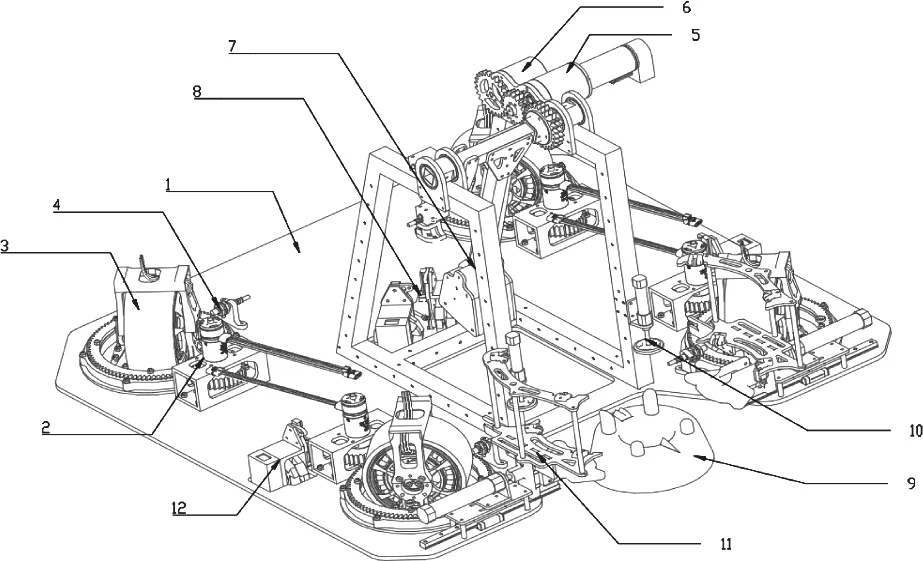
图1 踢球机器人设计原理图

表1 图1结构说明
1.2 舵轮结构
如图2所示舵轮结构及表2所示,舵轮结构图中,走线架用于固定舵轮上的线,防止在舵轮旋转的时候造成损坏。铝制轮毂与硅胶轮配合使用,承载底盘。电机转轴座,支撑电机转轴一端,将电机固定在玻纤底盘上。铝制轮毂与电机转轴座之间的连接靠深沟球轴承实现。磁编码器通过检测电机转轴上的磁环来读取电机所转角度。舵轮动力来源是电机。电机定轴座与玻纤底盘连接,固定并支撑电机的一端。
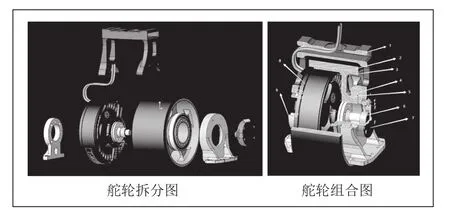
图2 舵轮结构图
表2 舵轮结构说明
1.3 捡放球及姿态矫正机构
如图3和表3所示,捡放球及姿态矫正结构图中,捡放球气缸,通过气缸的伸缩来实现捡放球结构的上下移动,达到捡放球的目的。捡放球气缸固定角铝,用来将气缸固定在踢球结构的保持架上。圆卡片,与捡放球气缸连接,传递捡放球气缸的动力配合升降玻纤实现上下移动[1]。升降玻纤,利用圆卡片传递过来的动力,带动姿态矫正机构上下运动,实现捡放球。球姿态矫正玻纤,利用姿态矫正气缸提供的动力,两边的姿态矫正玻纤同时合向中间,对球的姿态进行矫正。导轮,辅助球姿态矫正玻纤对球的姿态进行矫正。姿态矫正气缸,姿态矫正的动力来源。姿态矫正气缸固定角铝,用来将矫正气缸固定在其调整玻纤上面,便于调整。上下矫正连接,连接捡放球机构和姿态矫正机构。捡放球滑块和矫正玻纤以及球座姿态矫正件配合,实现球的捡起和放下功能。滑动角铝,连接矫正件和捡放球滑块,带着球座姿态矫正件上下移动。球座姿态矫正件,利用姿态矫正气缸提供的动力向中间合拢,对球座进行姿态矫正。姿态矫正滑块,连接姿态矫正机。姿态矫正滑轨,限制球姿态矫正玻纤和球座姿态矫正件的运动轨迹,保护气缸。姿态矫正气缸调整玻纤,固定姿态矫正气缸并控制姿态矫正的调节程度。垫高尼龙柱,调节矫正气缸的高度位置。
1.4 踢球架
如图4和表4所示,踢球架结构中,踢球结构保持架,保持踢球结构的位置,将踢球结与玻璃纤维底盘连接。绝对式编码器,与电机配合,监测电机所转角度。MAXON EC30电机,踢球脚的动力来源,为踢球提供动力。磁铁座,前端固定一个磁铁,可以被霍尔开关检测到,用于踢球过程中的初使位置确定。霍尔开关,检测磁铁并给控制系统传回一个信号。

表4 图4结构说明
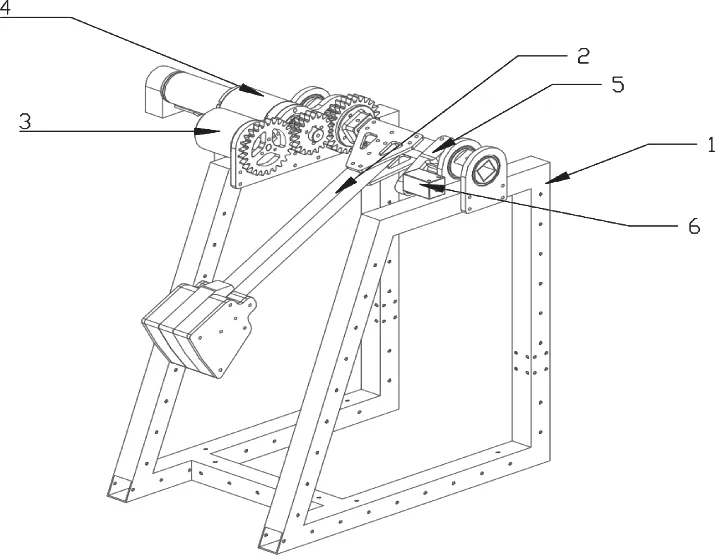
图4 踢球架
2 工作原理
如图1所示,机器人启动后,通过正交码盘和陀螺仪进行初始位置角度记录。如图4所示,踢球机构初始化至初始位置,如MAXON EC30电机的驱动,与霍尔开关检测磁铁座前端固定的磁铁相互配合,可完成踢球机构初始化。将橄榄球球座置于图1中的球座处,橄榄球并会触发红外测距模块。传感器将信息返回主控制器中,图3中的姿态矫正机构中,两气缸前推后拉往返一次后拉将球座和橄榄球的进行姿态矫正,将球竖直放置于球座的上端,图4机构中的红外测距模块触发,机器人接收到球已放好的信息,人触发图4中的红外测距模块,图3中球调整机构会将球抓住并调整姿态(两个气缸同时前推,球座夹持,球姿态矫正玻纤和导轮共同矫正橄榄球姿态。随后,捡放球气缸回拉,升降玻纤传动,捡放球滑块进行限位,抬起整套姿态矫正机构,完成捡球动作);捡球后,机器人在舵轮转向驱动和舵轮配合提供移动动力,利用定位系统反馈数据,在到达设定位置的过程中,通过全场定位系统的数据和程序对角度进行设定,调整踢球角度;到达后,调整机构将球座和球放下气缸前推,整套姿态矫正机构下降,球座触底,两气缸同时通过节流阀缓慢后拉,将球和球座平稳放下执行踢球动作。踢球结构将球踢出(利用图4中绝对式编码器对电机转角进行转矩控制,进而控制踢球脚的力度以及方向,完成定点踢球[1]。最后,机器人夹持球座,对球座进行重复利用,踢球机构回初始位置,并等待下一个新的指令。机器人装有多个高精度的传感器,完成数据的收集,并反馈给控制系统,精确调整机器人的运动。
3 总结
本文设计了一款基于机器人舵轮底盘进行全方位移动的自动踢球机器人,从结构设计、舵轮设计、捡放球及姿态矫正机构及踢球架对踢球机器人进行了设计及描述。本设计可以有效实现人机互动,可用于橄榄球运动的训练、宣传以及性能测试。
