基于车载毫米波雷达的目标检测CFAR算法研究
2022-03-17陈海玲徐靖谭蓉凡李海娟郑休宁
陈海玲,徐靖,谭蓉凡,李海娟,郑休宁
(梧州职业学院,广西梧州,543000)
关键字:毫米波雷达;OS-CFAR算法;CA-CFAR算法
0 引言
在汽车自动驾驶领域,通常采用摄像机、超声波设备、激光雷达、毫米波雷达来进行目标检测,但只有毫米波雷达传感器在各种苛刻的环境条件下能保证系统的可靠性。由于这个原因,基于毫米波雷达的主动安全系统已成为智能汽车系统的重要关键技术。例如,前向防撞、盲点检测、变道辅助、后碰撞警告和自适应巡航控制。对于毫米波雷达来说,发射的雷达波通常存在被多次反射后被接收的场景,如在停车场的拐角处或街道旁的防撞护栏处,对于这些检测到的杂乱目标,数据的可信度显得尤为重要,系统的虚警概率应在复杂的环境下保持恒定,CFAR门限随输入噪声变化而进行快速的自适应。在实际的测量中,如果选择太多的门限值,未知功率的噪声会导致许多误报。相反,如果设置得太高,将只能检测到较少的对象。CFAR算法应提供一个与噪声层相适应的输出,并确保假警报的数量不依赖于噪声功率。在接下来的章节中将介绍最常用的两种CFAR算法,并通过仿真和实验数据来比较各自的性能。
1 CFAR算法介绍
1.1 CA-CFAR算法
CA-CFAR(均值类CFAR)算法的核心思想是通过对参考窗内的采样数据取平均来估计背景噪声功率。事实上,目标峰值并不在一个单元上,而是在一些范围单元上有所延伸,目标相邻的数个单元不作为背景杂波的估计,作为保护单元P。对于每个单元格,T是常数,并根据窗口N值大小进行计算。如果目标Y值超过门限(T×Z),则判定检测到目标。具体的算法框图如下图1所示。
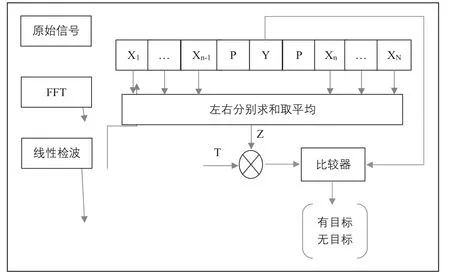
图1 CA-CFAR 算法框图
1.2 OS-CFAR算法
与CA-CFAR算法相反,OS-CFAR(统计有序CFAR)算法只使用参考窗口中的单个振幅。如下图2所示。算法的基本框架类似于CA-CFAR,滑动参考窗口是围绕被测单元及其保护单元,核心思想是通过对参考窗内的数据由小到大排序,选取其中第K个最大数值假设其为杂波背景噪声。在文献中[6]提到,K值取接近3/4N时最有利于背景噪声的估计,使检测虚警目标的概率降低到最小。
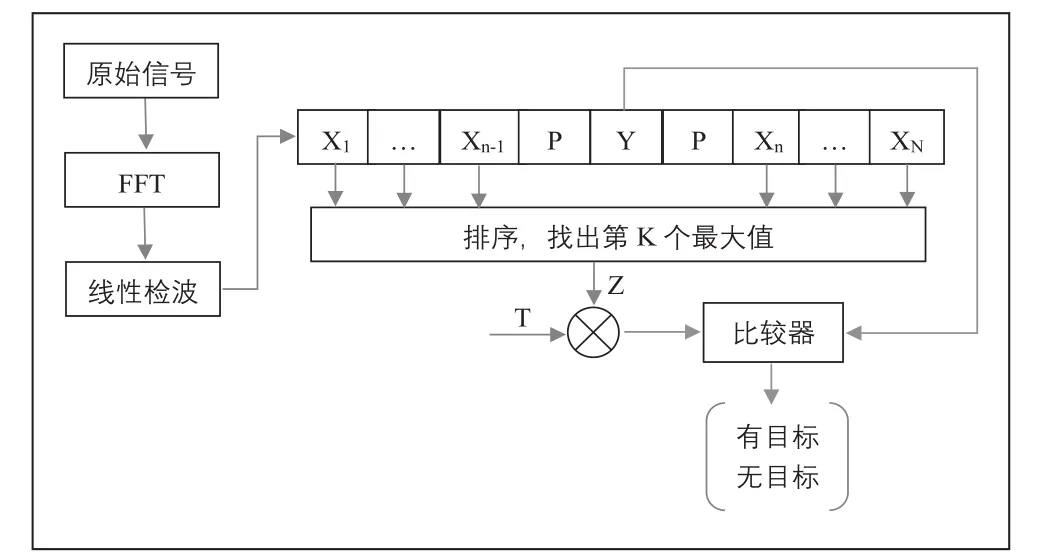
图2 OS-CFAR 算法框图
2 CFAR算法仿真分析
2.1 杂波环境仿真分析
杂波通常代表目标检测中所有不需要的背景信号,例如在汽车自动驾驶中雷达信号的多路径反射而产生的回波。CFAR算法必须要确定这些杂波是不相关的,因此,在杂波域下,门限值应相应增加。对于包含杂波的环境,如果选择的滑动窗口比杂波区域大得多,则杂波样本对平均值、K值的影响较小,导致判决门限不够陡峭,边缘很有可能被误检测为目标。图3展示了杂波区域对于N=24窗口的检测结果,门限能有效的识别杂波。相反,对于N=32,CA-CFAR算法会检测位于左侧杂波边缘的对象,如图4所示。同样,OS-CFAR算法也无法克服这一问题,仿真结果与CA-CFAR相似,如图5所示。在仿真环境中,杂波占据14个距离单元,如果参考窗口的大小是杂波域的两倍以上,杂波样本影响门限值的结果较少,导致多个目标被检测到。因此,对于窗口大小N为32的两种算法,都不满足要求虚警率要求。

图3 CA-CFAR算法在杂波环境下的仿真结果
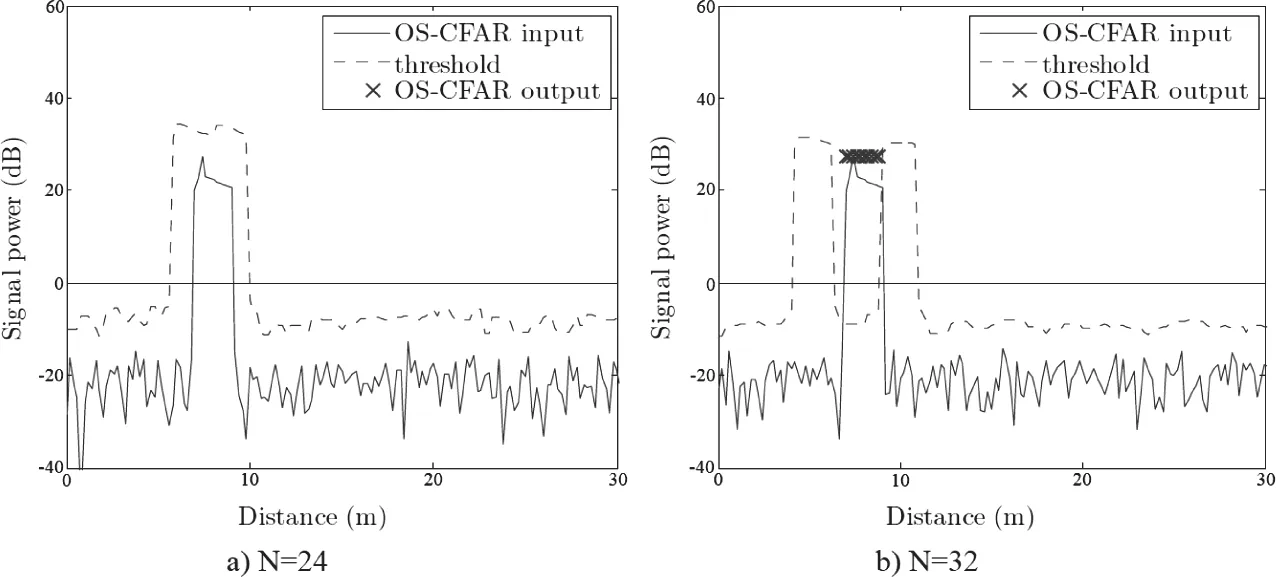
图4 OS-CFAR算法在杂波环境下的仿真结果
2.2 多目标环境仿真分析
在存在多个目标的情况下,相邻的目标峰值可能会导致门限值的增加,会出现遮蔽效果,导致某些小信号无法被检测到。从噪声估计的角度分析,较大的参考窗口应能提供更可靠的噪声估计,然而,对于CA-CFAR算法,在多目标的情况下,由于相邻目标太过接近,峰值落在同一噪声估计的滑窗内,由于遮蔽效果导致其中一个目标未被检测到,如图5所示。对于OS-CFAR算法,采用排序估计噪声的方法,有效的避免了门限值的增加,参考窗口中的峰值对测量结果没有影响,目标都能有效的被检测到。
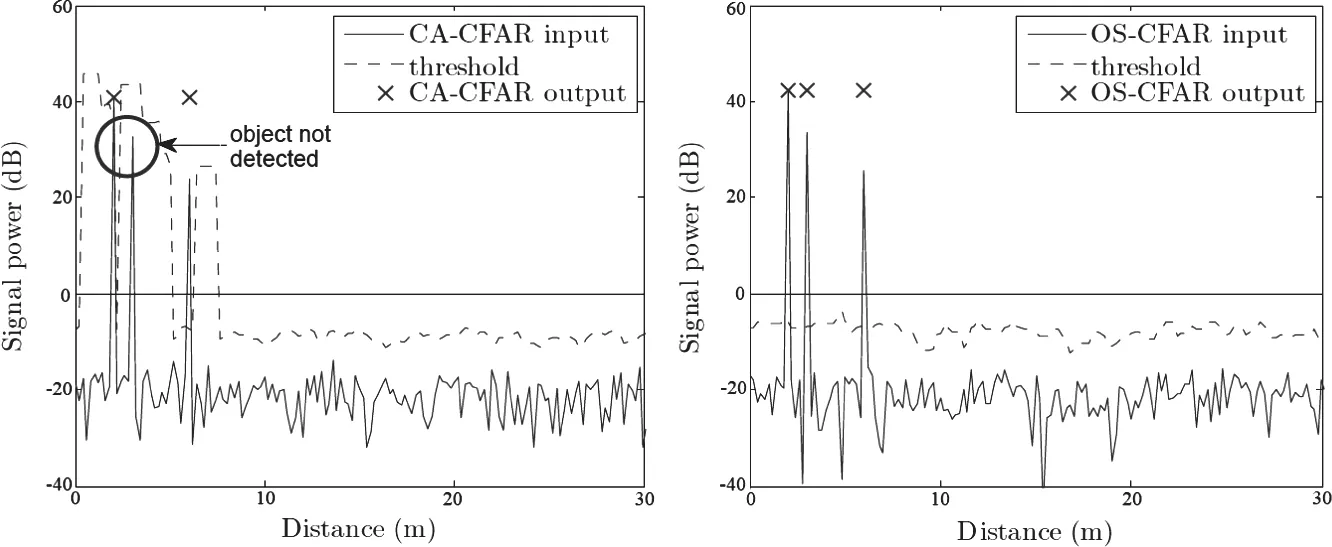
图5 CA-CFAR和OS-CFAR算法在多目标环境下的仿真结果
3 车载毫米波雷达系统
本文采用线性调频连续波(FMCW)毫米波雷达来验证CFAR算法,雷达系统核心的毫米波传感器模块是基于TI公司的76GHz到81GHz的毫米波传感器评估板AWR1243BOOST,此评估板包含MMWAVE-STUDIO环境和DCA1000实时数据捕获适配器的相关资源,便于雷达原始数据采集存储,并在电脑上做相关的算法研究工作。AWR1243BOOST评估板如下图6所示。

图6 AWR1243BOOST 评估板
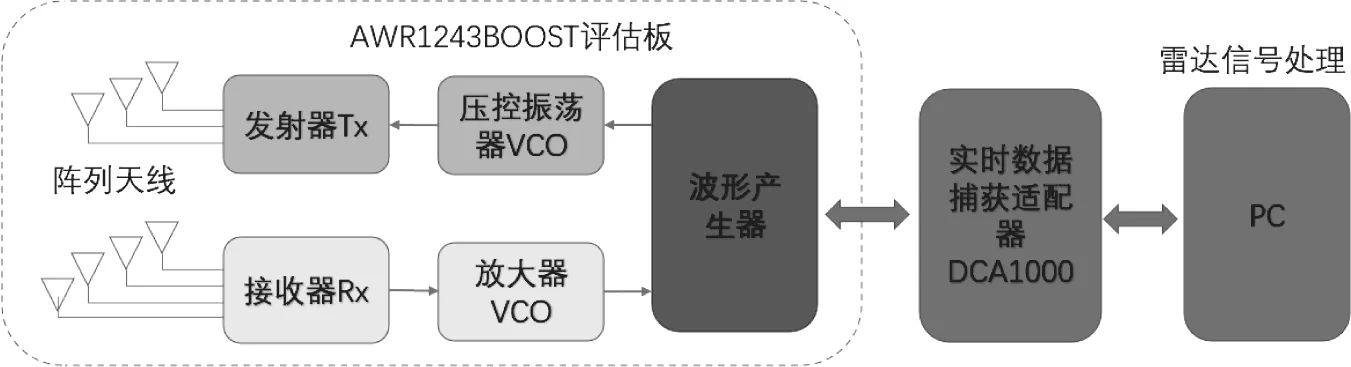
图7 汽车毫米波雷达系统硬件框图
AWR1243芯片的中频带宽为15MHz,最高采样率为37.5MHz,通过LVDS接口把采集的数据传输到实时数据捕获适配器DCA1000的DDR中,通过MMWAVE-STUDIO 环境和USB接口把采集的数据传输到电脑中存储。在电脑中,通过MATLAB工具对接收到的数据进行数字解调,进行CFAR算法分析。
4 CFAR算法实测分析
4.1 纯噪声环境验证分析
通过将车载毫米波雷达硬件系统的天线对准空旷的室内测试环境,对采集到原始数据做距离FFT,可以得到在纯噪声环境中的虚警率,如下图8所示。通过图8可以发现,两种算法的输出都位于雷达天线附近,通常在雷达系统中由于直流偏移导致;因AWR1243芯片具有自身芯片直流滤波功能,可以分析出图中的直流偏移由发射和接收天线的反射串扰导致。在目标检测中,基于直流偏移,通过使用高通(HP)滤波器来消除,如图9所示。除此之外,两者的门限值计算算法工作正常,因此数据序列中未出现错误的目标检测。

图8 纯噪声下的CFAR算法检测结果
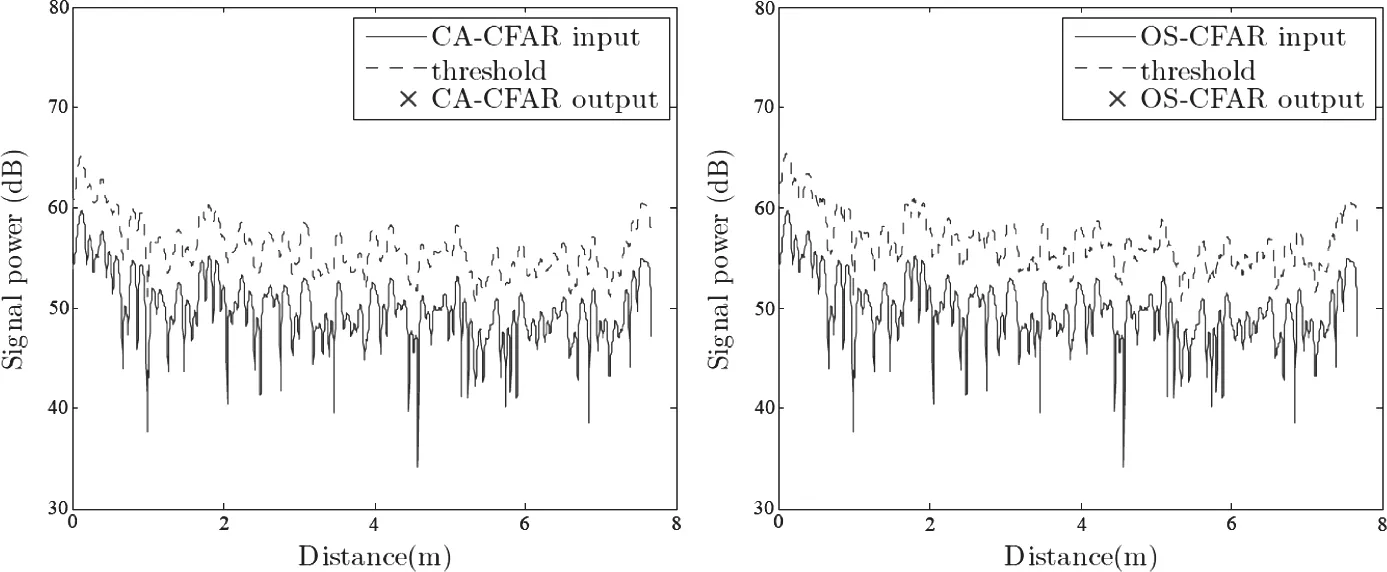
图9 经过HP滤波器后的CFAR算法检测结果
5 多目标环境下CFAR算法验证分析
针对仿真分析中的目标掩蔽问题,在雷达前方4米附近,放置两个相聚1米的金属反射块。取原始信号距离维度的数据做128点的FFT,窗口选取N=32时,如仿真分析一样,CA-CFAR算法的门限值由于使用了2个目标的峰值,导致其中一个目标未被检测到,如图10的所示。在同等条件下,OS-CFAR算法却能很好的检测到所有目标,CA-CFAR算法的检测能力明显比OS-CFAR算法的检测能力弱。
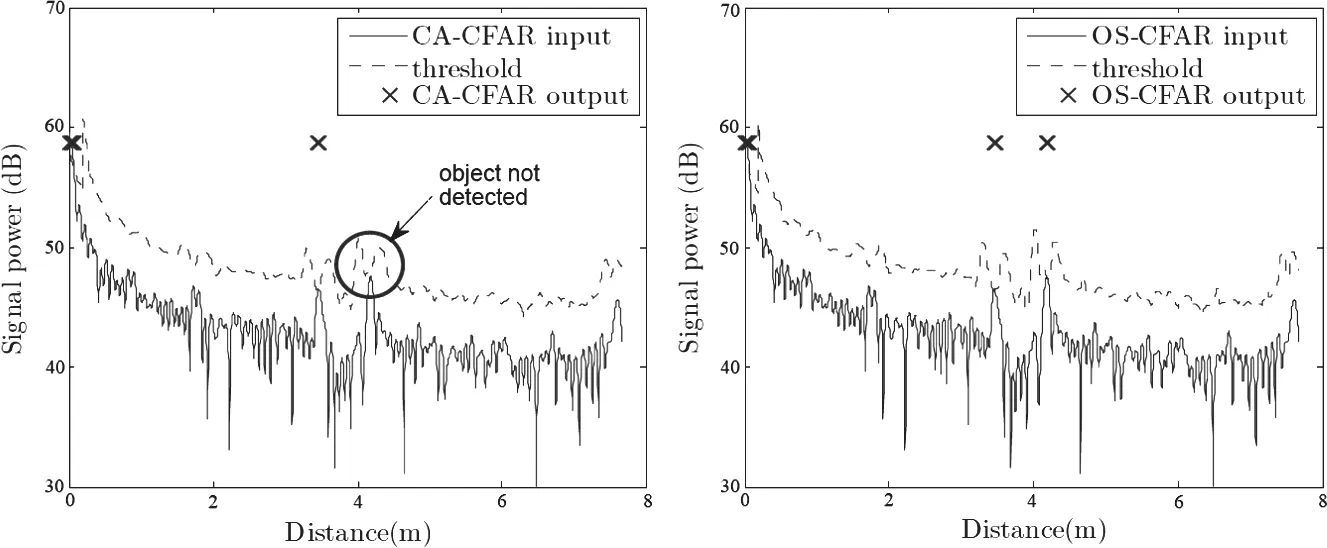
图10 多目标场景下的CFAR算法检测结果
6 总结
本文通过仿真和实测两种方法,对CA-CFAR和OS-CFAR两种算法进行了比较。从仿真和实测结果可以清楚地证明,CA-CFAR最显著的缺点是滑动窗中的每个峰值或杂波样本都会影响噪声门限值。相反,OS-CFAR只使用指定的值,即排序引用窗口的第K个最大值,能够忽略潜在的峰值或杂波样本。在算法实现方面,CA-CFAR算法比OS-CFAR算法更易于处理,比例因子在CA-CFAR中使用的是一个封闭的公式,取决于指定的参数;而OS-CFAR通过迭代计算才能确定K值,具有更高的计算成本。
在汽车自动驾驶中,具有掩蔽效应的CA-CFAR算法将存在着严重的问题。OS-CFAR算法对参数变化具有鲁棒性,针对高计算成本问题,在当前主流的汽车自动驾驶中,硬件会配备超大算力的芯片,排序计算的成本也就显得微不足道,OS-CFAR算法无疑是两种选择中更好的选择。本文以上仅对最基本的OS-CFAR、CA-CFAR算法在汽车毫米波雷达目标检测进行了分析,后续的研究中,可以针对CFAR扩展的算法进行了进一步的分析。
