基于ELM的人体跌倒预测算法
2022-03-17朱文辉李伟洪波
朱文辉,李伟,洪波
(黑龙江科技大学 电气与控制工程学院,黑龙江哈尔滨,150022)
0 引言
根据第七次全国人口普查发布的数据,2020年末,中国的65岁及以上老年人口达到1.91亿人,65岁及以上人口占13.5%[1]。随着当今社会老龄化的发展,老人问题也成为社会热点问题。老人属于易摔倒人群,在摔倒后很容易造成骨折等后果,其治疗将会给家庭带来严重的经济负担[2]。并且因跌倒而导致死亡的比率高居前列。在不影响老人正常活动的前提下,通过科学的手段预测跌倒,并利用快速保护装置触发,起到保护老人跌倒预防受伤的情况[3]。目前,关于跌倒保护装置的研究已经成为了新的研究热点之一。
至今为止,能够提前预测老年人跌倒的算法并不太完善,目前通常使用跌倒预测方法为合加速度阈值法,该方法通过合成三相加速度或者角速度,然后设定合加速度的阈值来区分跌倒行动和正常运动[4]。该方法能快速检测出结果并做出判断,但是其准确性与设定的阈值关联性强,并且合加速度在跌倒保护装置设计中的适用性差。因此需要设计一款人体跌倒保护装置,能够准确的辨别跌倒行为,保护装置快速的反应动作,并且能够具备很好的适用性。
1 特征提取
本文选用MPU6050芯片检测人体活动加速度信号,MPU6050芯片是InvenSense公司生产的检测人体姿态和重力加速度的传感器[5],该芯片具有便宜,适用性好等优点,而且芯片包含了三轴加速度信号和三轴姿态角信号的获取。为了更好的应用于跌倒保护装置,测试实验选用了腰部,和大多数跌倒保护装置相同的信号采集部位保持一致。因此,以腰部为坐标原点O建立特征坐标系。为更好的观测加速度和姿态角的变化情况,分别按X,Y,Z建立三相加速度坐标轴;按Pitch角,Roll角,Yaw角建立三向姿态角坐标系。其中,Pitch角表示人体与上下竖直方向之间的偏移角;Roll角表示人体与左右侧向水平方向的偏移角;Yaw表示人体前后水平方向的偏移角[6]。最终建立如图1所示复合特征坐标系。
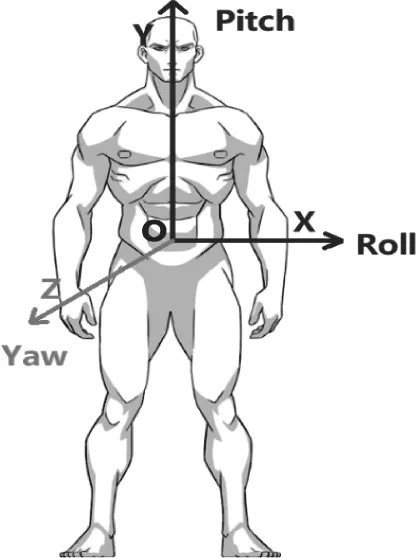
图1 坐标轴定义
按照图1所示方向安装的MPU6050陀螺仪芯片,提取各个动作下的三相加速度和角速度的数值进行分析,发现正常行走、前向弯腰、侧向弯腰等一般的正常行为与跌倒行为容易区分,就目前的加速度合成阈值法区分成功率也能够达到100%,但是对于像后仰、坐下后仰以及坐下后躺等类跌倒行为与跌倒行为则不易区分,很容易造成跌倒误预测。因此,选用多变量时序关联分析法对采集的三轴加速度数据以及三轴陀螺仪数据进行初步处理,得到利用Pitch角和Roll角合成数值RP_delta和Pitch值以及Y方向和Z方向合成加速度AccYZ_delta和AccZ能够很好的区分跌倒行为和正常行动[7]。其中RP_delta和AccYZ_delta的表达式如式(1)、(2)所示。

式中:Pitch,Roll——分别表示Pitch角和Roll角数值;
AccY,AccZ——分别表示Y方向和Z方向加速度。
通过测量分别得到后向跌倒、后仰、坐下后仰以及坐下后躺时,RP_delta和AccYZ_delta的数值变化如图2、图3所示。
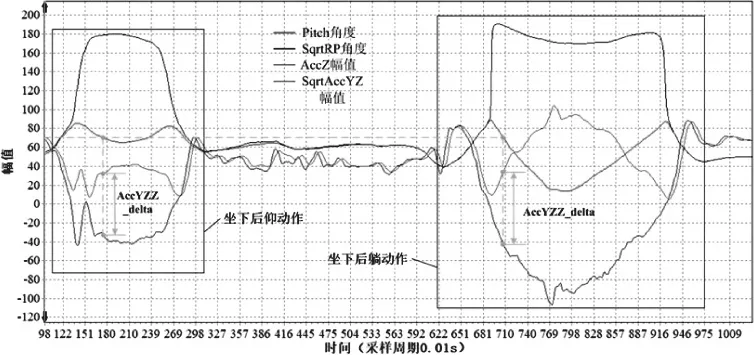
图2 坐下后仰和坐下后躺的多变量波形
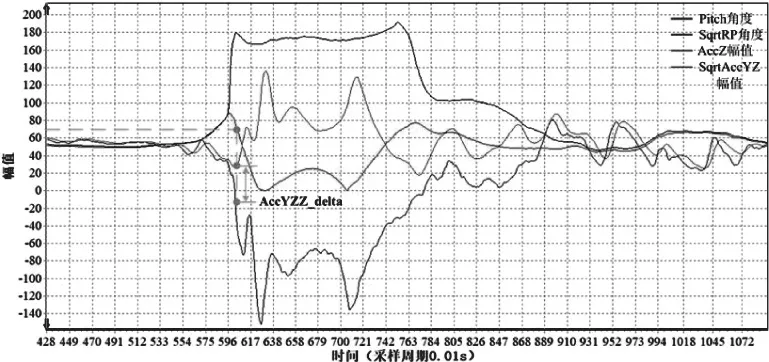
图3 向后跌倒的多变量波形
2 基于ELM的跌倒预测算法模型建立
2.1 数据预处理
本文选用时间序列如下所示

式中,X表示提取的三轴传感器数据;
k——表示序列长度。
因此,可得每一时刻的特征值XsT,XsT由四列向量表示。XsT公式为

式中,x1,x2,x3,x4——分别表示 RP_delta、Pitch、AccYZ_delta和AccZ采样数据。
接着,将数据进行标准化,利用式(5)对序列向量进行归一化处理

由此得到归一化序列XN为

2.2 基于ELM的跌倒预测算法
极限学习机(Extreme Learning Machine,ELM)是一种单隐层前馈神经网络模型下的一种算法[8]。ELM算法的特点在保证学习精度的前提下比传统的学习算法速度更快。本预测算法选取特征指标为Pitch、RP_delta、AccYZ_delta和AccZ,另外将上一刻的ELM输出结果作为第五个特征值输入。其中基于ELM的跌倒预测算法流程图如图4所示。
如图4所示,首先将预处理后的数据进行动作分割,本文采用滑动窗口的分割方法,对时间窗口长度以及移动步长进行设定,通过实验发现时间窗口设定为20个采样点,步长为5个采样点时,训练效果最好。由于采样芯片MPU6050采样频率为100Hz,因此采样100s的数据信息,即采样10000个数据信息,然后对10000个采样点进行滑动窗口的分割,得到1996个数据集,其中正常行动有1328个,后向跌倒203个,坐下后仰235个,坐下后躺230个。接着将带有标签的数据集导入ELM算法网络中,利用50%的数据集进行训练,用训练后的模型对所有的数据集测试。
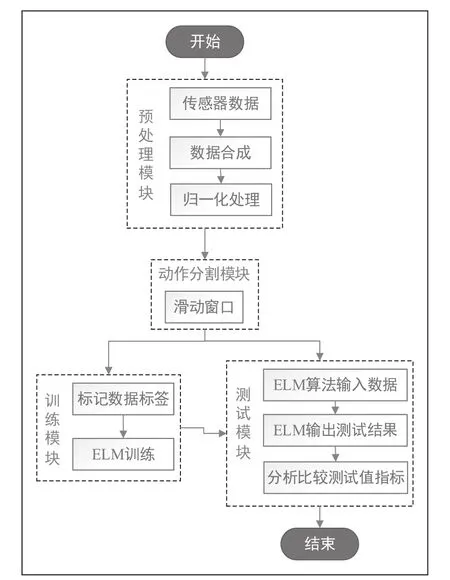
图4 基于ELM的跌倒预测算法流程
通过实验发现隐含层神经元个数对于基于ELM的跌倒预测算法的预测准确度有着极大的影响,因此,如图5所示为选用不同神经元数目的隐藏层,观察对预测结果的影响。由图5可知,当隐含层神经元个数为400时,基于ELM的跌倒预测最准确,预测准确度能达到99.7%。
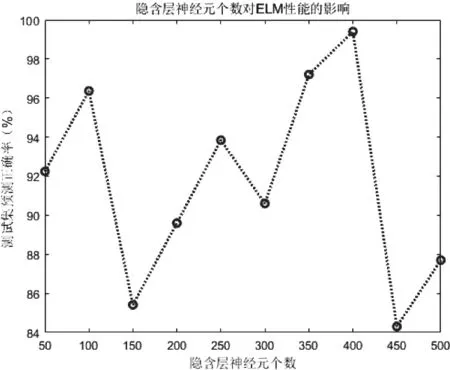
图5 ELM算法隐藏层对预测准确性影响
因此,选取隐含层神经元个数为400时,进行后续的测试实验。通过基于ELM的跌倒预测算法模型得到的预测值与数据集实际值对比如表1所示。

表1 各个标签动作下的数据集个数
3 算法的验证
3.1 算法特性分析
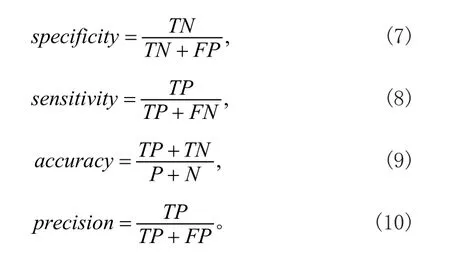
为了体现ELM跌倒预测算法的特性,本文引入Maso ud H等[9]提出的多指标理论,其中指标包括特异度(specificity)、灵敏度(sensitivity)、准确度(accuracy)和精度(precision)等。在跌倒预测中,特异度表示为正常行为未误判的比率;灵敏度表示为对跌倒行为正确预测的比率;准确度表示为所有正确预测的比率;精度表示为正确预测跌倒行为占所有正确预测的比率。当给定一组具有P个跌倒行为的数据和N个正常行为的数据,TP和TN分别定义为跌倒行为和正常行为的正确预测数量,而FP和FN分别定义为跌倒行为和正常行为的错误预测数量。因此,specificity、sensitivity、accuracy和precision的计算公式如下:
分别进行基于ELM的跌倒预测算法和合加速度阈值算法的实验,通过多指标进行对比。如图6所示。
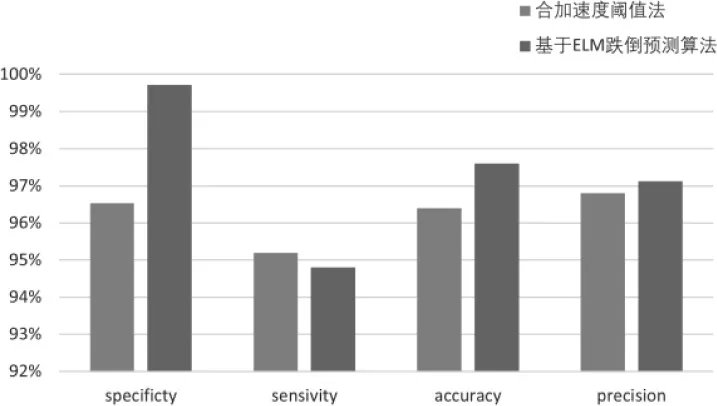
图6 基于ELM的跌倒预测算法与传统算法的四指标对比
由图6可知,合加速度阈值算法仅仅在灵敏度方面略优于基于ELM的算法,两种算法在精度方面基本一致,而在特异度方面,基于ELM的跌倒预测算法明显优于合加速度阈值算法2%左右,跌倒预测准确度更是能达到97.6%。因此,基于ELM的跌倒预测算法能够很好的替代传统的合加速度阈值算法完成跌倒预测。
3.2 算法快速性分析
本文提出的基于ELM的跌倒预测算法旨在更好的应用于跌倒保护装置,为了满足跌倒行为出现就能够及时的输出跌倒判定信号,所以算法的快速性需要进行分析。
由于实验选取的采样芯片的采样频率为10Hz,并且选取的滑动窗口长度为20个采样点,因此每个标签数据集的时间长度为0.2s。当穿戴上跌倒保护装置时,时间采样窗口实时传输出人体姿态信号。根据研究显示,人体在跌倒过程中持续时间大约为0.8s左右,在此期间,跌倒保护装置需要完成跌倒预测、信号处理和气囊展开等步骤。其中,信号处理归咎于核心处理器的功能,一般在0.1s内能够完成,气囊需要引爆展开,现有的高速气囊展开时间约在0.1s左右,而本文提出的跌倒预测算法预测跌倒时间在0.2s左右,整体时间能够满足跌倒保护装置的设计。即基于ELM的跌倒预测算法能够满足快速性要求。
4 结束语
本文根据跌倒预测保护装置设计了一种基于ELM的跌倒预测方法,通过传感器提取人体行为三轴信号,通过多变量关联分析获取了特征值,依据信号处理方法对提取特征值进行预处理,结合滑动窗口数据以及ELM算法提出了基于ELM的跌倒预测算法。通过多指标理论分析了基于ELM的跌倒预测算法,得出该算法较于传统的合加速度阈值算法具备了更好的准确性等,并且满足跌倒保护装置设计的快速性要求,为后续设计跌倒保护装置提供了有效的保障。
