基于示功图的油井供液能力智能识别方法研究
2022-03-17陈夕松钱帅康
夏 峰,陈夕松,钱帅康,姜 磊
(1.东南大学自动化学院,江苏南京 210096;2.南京富岛信息工程有限公司,江苏南京 210061)
我国大部分油田属于低渗透油田,其丰度低[1]、渗透率低、单井产能低[2],导致目前采油机的抽油能力与油井底层供液能力难以精准匹配,采油机泵效低,耗电量大,抽油成本高。企业需要对采油机井的供液能力实时分析并制定冲次调节策略,实现采油机抽油能力与油井供液能力的准确匹配,达到节能增产的目的。
在采油过程中,传统上企业常采用动液面来衡量油井的供液能力,但动液面的测量成本较高且在动液面深度较深或受气体影响时测量结果并不准确[3]。随着示功图测试技术的不断进步,目前企业多凭借人工经验从示功图中定位凡尔开闭点并据此计算油井的供液能力[4]。该方法虽弥补了传统方法的不足,但仍存在实时性差和人工成本高等问题。
近年来,人工智能技术的发展为油井供液能力的定量化分析提供了技术支撑[5]。卷积神经网络回归模型可用于关键点的回归任务,这为从示功图中定位采油机的凡尔开闭点提供了可能。但前期研究表明,如果简单的将卷积神经网络应用于示功图凡尔开闭点识别这种细粒度、高精度任务上,极易导致网络模型存在精度和空间泛化能力上的不足。因此,亟需一种为凡尔开闭点识别任务定制化的卷积神经网络回归模型来解决上述问题。
1 方案设计
采用深度学习网络提取示功图图像特征进行训练,首先需要对原始的示功图二维数据进行数据预处理并绘制成示功图图像;然后为示功图图像数据集标定凡尔开闭点标签并将其划分为训练集、验证集和测试集;最后构建适合凡尔开闭点识别任务的深度学习网络模型并通过训练集和验证学习网络参数,根据测试集结果评估其泛化能力。
1.1 数据预处理
对原始的示功图二维数据进行数据预处理并绘制成示功图图像,主要步骤如下:
(1)由于传感器等不稳定因素,原始的示功图数据可能存在异常数据。本文将超出示功仪位移及载荷量程的数据定义为异常数据,对其进行过滤剔除以保证数据集的正确性。
(2)将过滤后的示功图位移及载荷数据归一化映射到[0,1]的范围内,对过滤后的示功图位移x=[x1,x2,…,xm]和载荷f=[f1,f2,…,fm],归一化公式如下:

式中:m-每个示功图原始样本数据集中位移和载荷的采样点数;xmax-抽油机的最大冲程;fmax-抽油机的最大载荷。
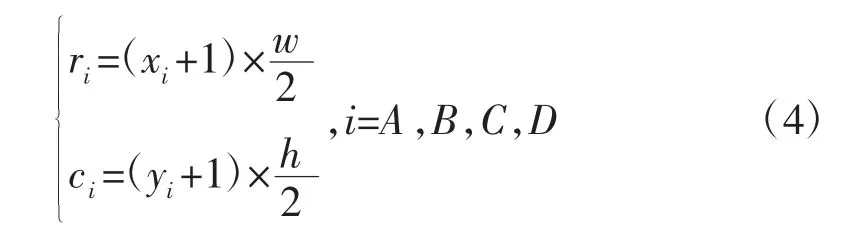
(3)新建w×h 的二维网格,将(2)中的归一化结果映射到该网格坐标中并进行向下取整,得到网格化后位移和载荷数据对应的像素点坐标r 和c,两者间的映射关系如下:

在本文中,考虑到深度学习网络常用到的输入图片大小及格式,设置w=h=256。
(4)将(3)中得到的示功图二维像素坐标点按照顺序两两相连至最后一点,形成封闭曲线,并借助OpenCV 库的工具将该二维网格可视化为示功图图像,图像尺寸为w×h。
1.2 标签生成及数据集划分
对绘制完成的示功图图像,从中标注出四个凡尔开闭点:固定凡尔开启点A、固定凡尔关闭点B、游动凡尔开启点C 和游动凡尔关闭点D,并通过图像处理工具LabelMe 生成四个点的像素点坐标值(rA,cA)、(rB,cB)、(rC,cC)和(rD,cD),为了消除量纲影响,让网络模型更快的收敛,将像素点坐标值归一化至[-1,1]作为该示功图图像的标签,归一化公式如下:
采用留出法将标定好的示功图图像数据集及其标签按照固定比例6:2:2 划分为训练集、验证集和测试集。
1.3 构建网络模型
本文采用融合了特征金字塔、高斯热力图和注意力机制的深度学习网络模型提取示功图图形特征并识别功图的四个凡尔开闭点,具体网络结构(见图1)。相较于传统的关键点识别任务中使用到的神经网络预测模型,本文的模型根据凡尔开闭点识别任务的特殊性做了以下三点改进:
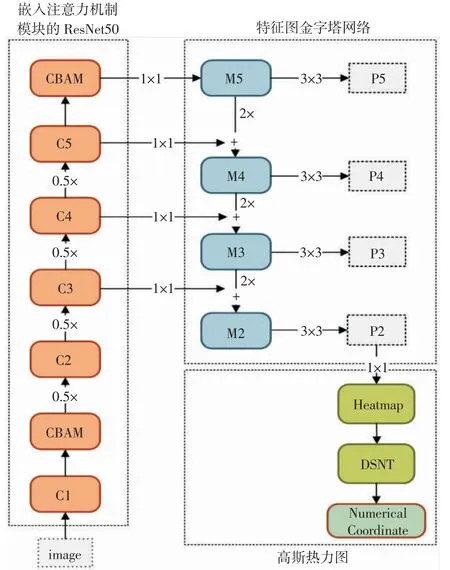
图1 凡尔开闭点智能识别模型网络结构图
(1)在提取特征的主干网络中嵌入了注意力机制模 块Convolutional Block Attention Module(CBAM),CBAM 是一种结合了空间和通道的注意力机制模块。注意力机制是一种聚焦于局部信息的机制,它的本质是定位到重要的信息,抑制无用的信息。空间注意力机制是寻找图像中对任务贡献最大的区域并让网络聚焦于该区域,而通道注意力是让网络关注于图像中对任务重要性更高的特征。本文的凡尔开闭点识别任务属于一种细粒度的定位任务,因此需要引入CBAM 模块增加主干网络的表征能力,让网络模型定位到对识别凡尔开闭点有价值的图片区域并关注该区域中对识别凡尔开闭点更有价值的特征。
(2)将主干网络提取到的不同尺度的特征进行特征融合。本文采用特征金字塔网络Feature Parymid Network(FPN)自上而下融合特征,融合后的特征同时利用了高分辨率的低层特征和具有语义信息的高层特征,而凡尔开闭点的定位任务也需同时结合这两种维度的特征。将不同层级的融合特征图分别用于凡尔开闭点识别任务,不仅能够测试不同尺度特征对凡尔开闭点的检测能力,还能够通过特征层级的分辨率来控制高斯热力图的分辨率。
(3)以高斯热力图Heatmap 的方式代替传统全连接层来预测最终的凡尔开闭点坐标。采用传统的全连接层直接回归四个凡尔开闭点的做法优点是整个网络的输出即为坐标点,同时整个模型的训练速度较快。但采用全连接层作为最终预测层会使得网络模型缺乏空间泛化能力,即让网络丢失了特征图上的空间信息。基于高斯热力图输出凡尔开闭点,其输出的特征图较大,空间泛化能力强,能够让网络模型学习到凡尔开闭点空间信息和点之间的相对位置关系,从而保证网络模型的平移等价性,这在载荷经常上下波动的示功图图像中尤为重要。
1.4 模型训练及测试
本文选取某原油开采企业2020 年1 月1 日到2020 年1 月25 日期间8 口抽油机井的示功图原始二维数据生成的示功图图像共8 672 张按照6:2:2 的比例构建训练集5 204 张、验证集1 734 张和测试集1 734 张,模型在训练集和验证集上的损失函数值变化趋势(见图2)。
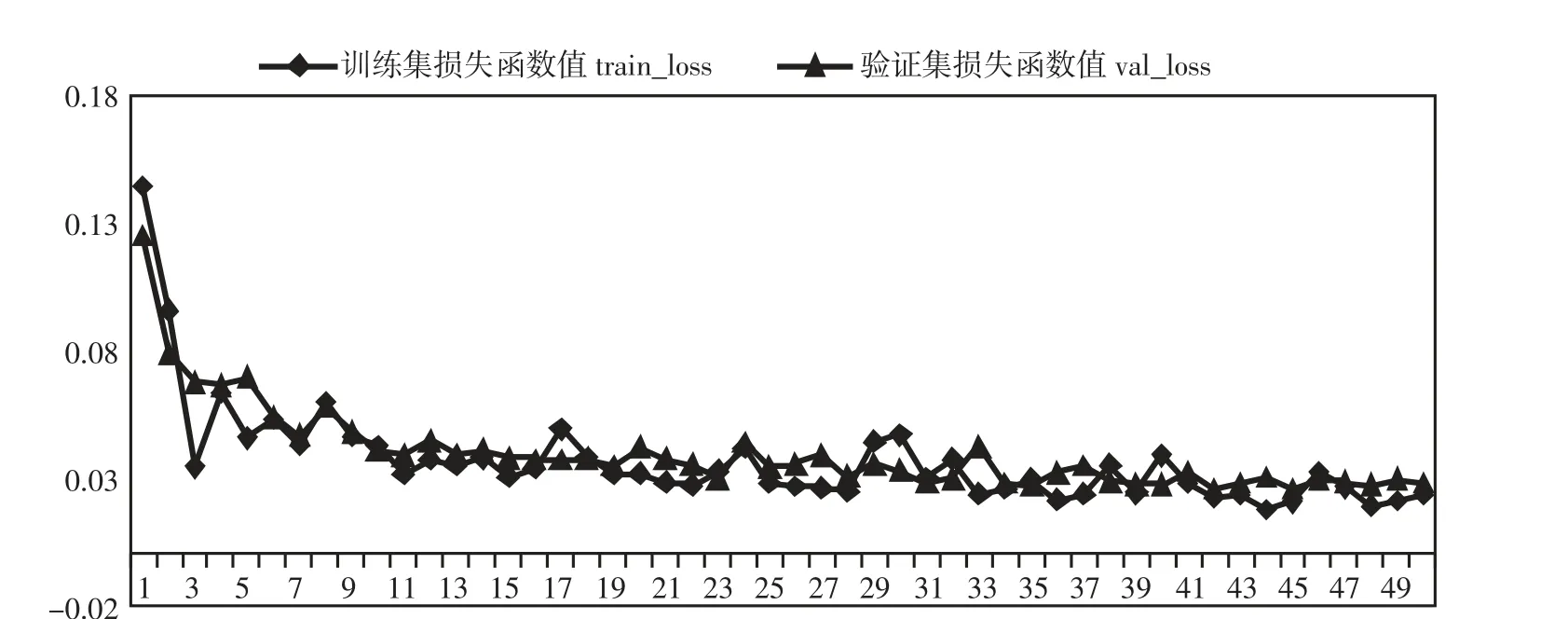
图2 损失函数值变化趋势图
将测试集数据输入至训练好的神经网络模型中,并根据模型预测的结果,将预测的凡尔开闭点坐标通过OpenCV 库可视化至输入图片中,结果表明在几种典型工况下,该模型均能准确识别出示功图的四个凡尔开闭点(见图3)。
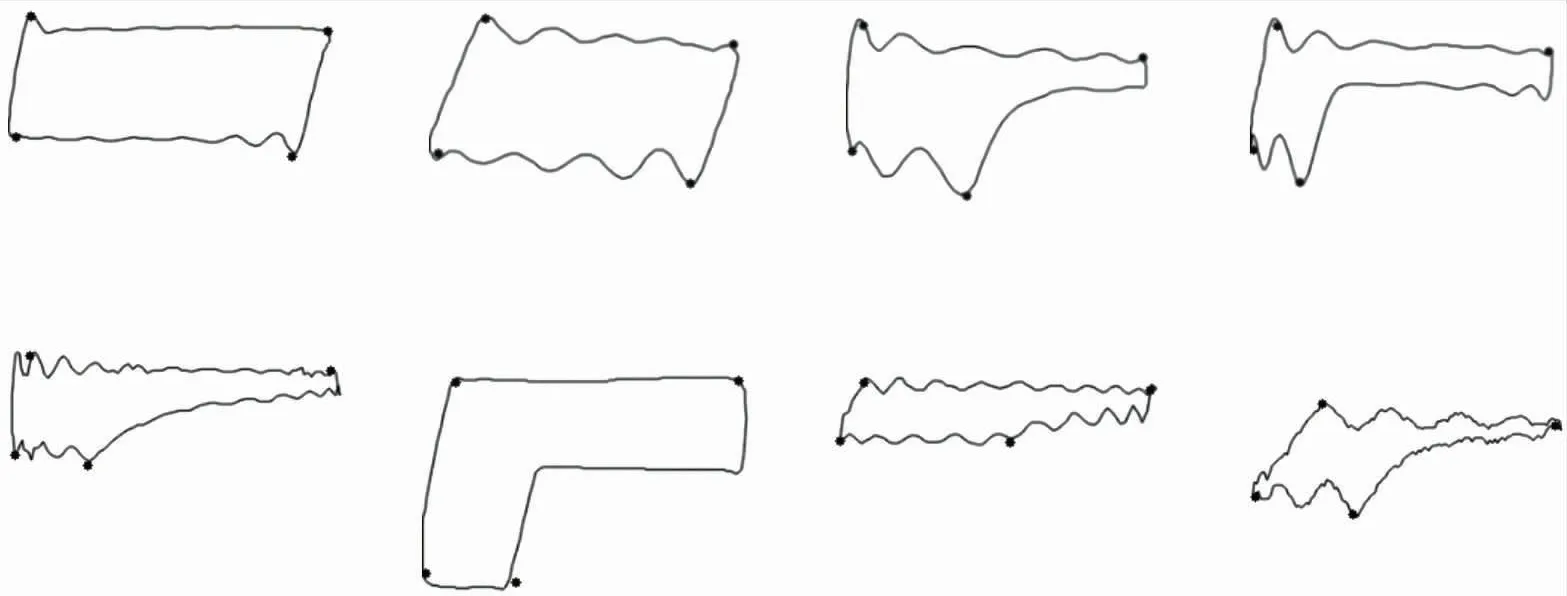
图3 测试集结果示例
1.5 量化供液能力
首先将采油机实时工况记录的示功图输入至训练完成的深度学习网络模型中获取对应的凡尔开闭点标签({xA,yA),(xB,yB),(xC,yC),(xD,yD)},然后根据凡尔开闭点标签计算凡尔开闭点的像素点坐标值,计算公式如下:
接着根据凡尔开闭点识别像素点坐标值计算抽油机的有效冲程Spe,计算公式如下:

最后,根据有效冲程Spe和采油机运行时冲程S 的比值量化供液能力指标β:

1.6 消融实验
为了验证本文提出的深度学习网络模型中特征金字塔、高斯热力图和注意力机制对凡尔开闭点定位的有效性,本文使用同样的数据集和训练参数进行消融实验。实验结果用测试集误差和是否具有平移等价性这两个指标衡量,测试集误差通过计算测试集的标签和实际预测结果间的均方根误差得出,是否具有平移等价性则表示网络模型的输出是否会随输入图像的平移变换做出等价的平移变换,实验结果(见表1)。
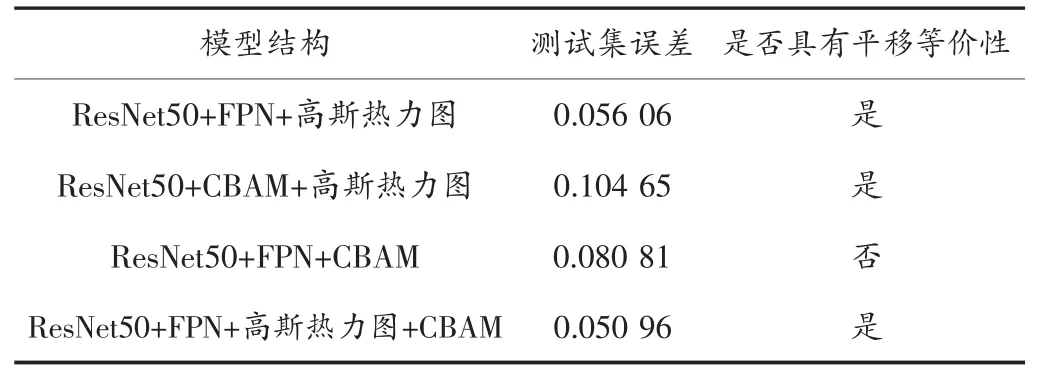
表1 消融实验结果
首先,移除高斯热力图预测模块并通过传统的全连接层点回归的方式预测关键点位置,实验结果表明,网络模型的测试集误差上升,同时模型也失去了平移等价性(见图4)。然后,再移除网络中的CBAM 注意力机制模块,实验结果表明虽然整个测试集误差上升较少,但在游动凡尔开启点上的预测精度下降了很多(见图4)。最后,移除网络模型中的FPN 模块,实验结果表明,由于特征提取网络的输出特征图只包含高层的语义信息且特征图尺寸较小,导致最终预测的高斯热力图出现了分辨率大幅下降的情况。
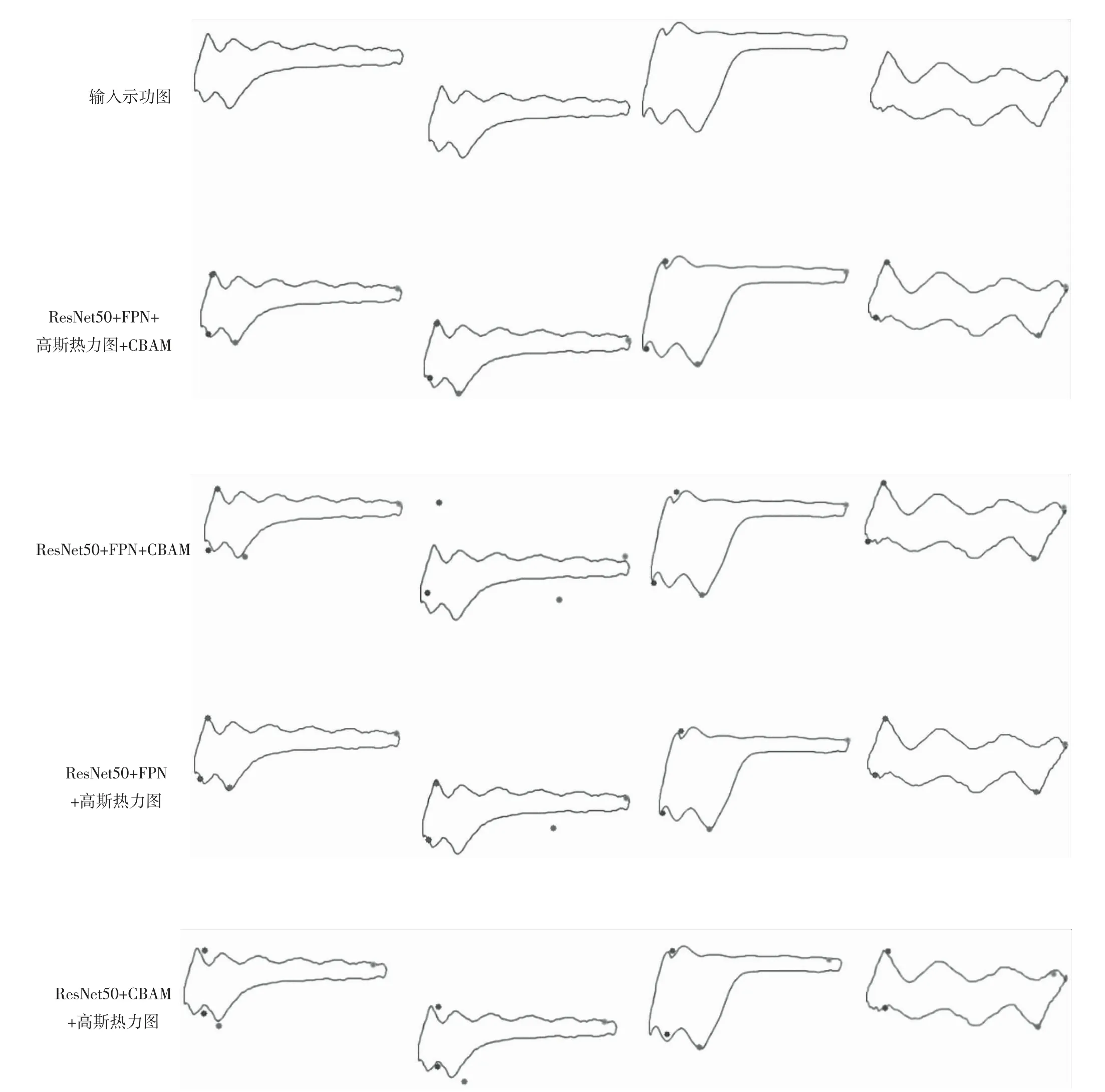
图4 网络模型测试结果
2 应用研究
本文选取某原油开采企业9 台抽油机的示功图原始数据进行实验。以2020 年3 月至2020 年5 月之间的数据构建示功图数据集,分析本文方法对抽油机供液能力识别的有效性。
在网络模型完成训练后,以某原油开采企业一口抽油机井在2021 年2 月的示功图原始数据作为实际应用对象,引入本文提出的供液能力智能识别算法。在2月18 日时,算法自动检测到此时抽油井的供液能力低于正常阈值,此时的示功图(见图5),智能识别算法的识别结果为 {(-0.69,-0.67),(0.90,-0.38),(-0.48,0.55),(-0.94,-0.33)},分别对应固定凡尔开启点A 的标签值(-0.69,-0.67),固定凡尔关闭点B 的标签值(0.90,-0.38),游动凡尔开启点C 的标签值(-0.48,0.55)和游动凡尔关闭点D 的标签值(-0.94,-0.33),将这些标签值按照式(4)反归一化后得到四个点的像素点坐标为:固定凡尔开启点A 的像素点坐标(39.68,42.24),固定凡尔关闭点B 的像素点坐标(243.20,79.36),游动凡尔开启点C 的像素点坐标(66.56,198.40)和游动凡尔关闭点D 的像素点坐标(7.68,-85.76),根据这四个凡尔开闭点的像素点坐标和式(5)计算其有效冲程Spe为1.38 m,最后由公式(6)计算出供液能力指标β 为23%,该值小于由专家设定的冲次下调供液能力指标阈值,因此选择以0.1 的步长向下调整抽油机冲次,调节周期为1 d,在经过两日的冲次调节后,该抽油机井经济效益有所上升(见表2)。
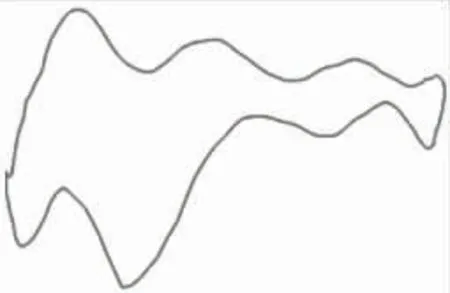
图5 实时工况示例图

表2 冲次调节后油井生产数据
由上述分析可知,本文提出的油井供液能力智能识别算法,能够实时监测抽油机井供液能力的变化,从而根据供液能力指标动态调节抽油机冲次。通过本文提出的方法可以实现实时、准确的抽油机供液能力识别,为后续油井的智能控制提供可靠的调节依据。
3 结语
本文提出了一种基于示功图的油井供液能力智能识别方法,该方法基于采油过程中生成的示功图,搭建卷积神经网络回归模型识别示功图的凡尔开闭点。通过在网络模型中融合高斯热力图、特征金字塔和注意力机制以满足凡尔开闭点识别任务对细粒度和高精度的需求,从而准确高效地识别四个凡尔开闭点并据此实时量化采油机井的供液能力,为后续的冲次调节和间抽控制提供可靠的理论支撑。相较于传统方法,该方法在识别实时性上提升显著,满足了企业工程应用需求,对降低抽油机系统能耗,增加油田产量具有良好的应用价值。
