载波相位时间比对技术分析
2022-03-17付宇谢淑香
付宇,谢淑香
(1.中国兵器工业试验测试研究院,陕西渭南,714200;2.北京无线电计量测试研究所,北京,100089)
0 引言
北斗卫星导航系统是我国根据国家安全和经济社会发展的需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。目前北斗系统的应用已非常普遍,北斗相关产品也早已进入我们的视线,在交通运输、地理数据采集、渔业、减灾、农业和电力等方面已经得到了广泛的使用,北斗应用正处于一个快速发展的时期,还将不断有新的应用领域出现[1]。目前,由于技术发展的限制,北斗导航系统在高动态条件下实现高精度导航定位测量技术,还是一项技术难题。本文针对北斗卫星系统精确定位中的载波相位差分时间比对技术进行了分析和研究,为高动态条件下实现高精度导航定位测量提供技术基础。
1 差分定位技术
目前国际上差分定位技术依照系统对参考站设置需求,主要分为以下三种:
第一种为单基准站差分定位系统,顾名思义系统只需要一个基准站,且基准站的坐标精确已知,该系统成本较低,是普通用户最常采用的差分定位方式,通常为满足厘米级的高精度定位需求,移动站与基准站的距离需控制在20km范围内[2]。
第二种为局域差分定位系统,该系统需要多个参考站以一定的密度均匀地分布在需要差分技术作用的区域,移动站在该区域内可获得各基准站的差分信息平差量,进而实现高精度的相对定位,通常要求移动站与参考站的基线距离不超过150km。
第三种为广域差分定位系统,该系统对移动站与基准站的基线距离没有严格的要求,各基准站采用对各种观测误差分别进行处理的方式,通过插值拟合计算移动站所需的各项误差的差分改正数,进而达到提升定位精度的目的。
2 载波相位差分定位技术
载波相位差分定位技术利用在短基线下移动站与基准站的各项观测误差具有较高的时间相关性和空间相关性的特性,通过对基准站和移动站的观测信号进行载波相位差分处理,达到了削弱甚至消除电离层、对流层、相对论、多径等多种观测误差的目的,从而实现了高精度的相对定位和相对时间差测量。
2.1 载波相位差分时间比对原理
载波相位差分时间比对方法利用GNSS差分定位技术,通过星间单差消除卫星钟差,对单差载波相位观测方程正交分解或者双差消除接收机钟差,固定出基线的整周模糊度从而可以解算出基线矢量[3]。对接收机时钟偏差的计算中,使用伪距和载波相位的组合观测方程,单差消除卫星钟差的影响,将基线矢量和伪距/载波相位观测值作为已知量,在此基础上计算包含了接收机钟差的载波相位单差整周模糊度[4]。相比于利用伪距测量值的共视时间传递方法,载波相位测量值拥有更高的精度,时间比对结果也更加精确[5]。相比于双向卫星时间频率传递的方法,利用差分技术不受设备限制,成本低易于实现,更容易得到广泛有效的应用。
图1给出了利用GNSS差分技术进行高精度时间比对的原理。其中,几何距离单差值可由GNSS差分定位方法解算,精度毫米级。伪距测量值估计粗略L1-L2的差值,载波相位测量值解算整周模糊度,得到精确的L1-L2差值。最终解算得到1-2ns级别的钟差时间t。GNSS 载波相位观测值较伪距观测值的精度要高2~3个量级,可以实现更高精度的GNSS时间比对。但由于载波信号是一种周期性的正弦信号,相位测量只能测定其不足一个波长的部分,存在着整周不确定性问题,使解算过程比较复杂。因此利用载波相位进行钟差解算的重点和难点即整周模糊度的解算。
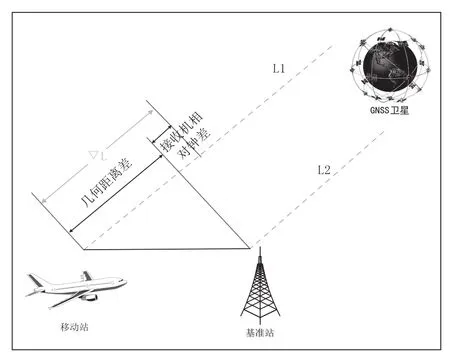
图1 高精度载波相位时间比对原理
2.2 整周模糊度解算方法分析
解算载波整周模糊度时可以采用单频或者多频的模式,两者原理相同。利用双频接收机,将观测数据进行线性组合,可以完成消除误差,周跳探测等。双频观测数据的噪声除了电离层延迟与信号频率有关之外,其它的噪声一般都与信号频率无关,所以,为了分析线性组合观测值的特性,可以只考虑电离层延迟的影响,忽略其它的噪声影响。在数据处理的过程中,经常使用的线性组合有:无电离层组合、电离层残差组合、宽巷相位组合等。通常,将双频载波进行宽巷组合得到的组合波长更长,有利于整周模糊度的固定。
在载波相位单差时间比对中,整周模糊度的固定是一项关键技术。根据RTK技术的相关理论可知,只要接收机对初始历元的可见星实现持续跟踪,则整周模糊度的维数不会发生变化,而观测方程的冗余度会随着历元数的增加而增加,因此多历元模型具有更好的可靠性。本文中同时使用伪距在载波的信息对整周模糊度进行求解,由于伪距的精度较低,单历元虽然也能解算出载波的整周模糊度,但是准确度较低。因此本文采用多历元模型通过对观测方程递归的方法解算初始整周模糊度。具体实施过程如下。
伪距联合载波求解整周,观测方程和结合方程如下:
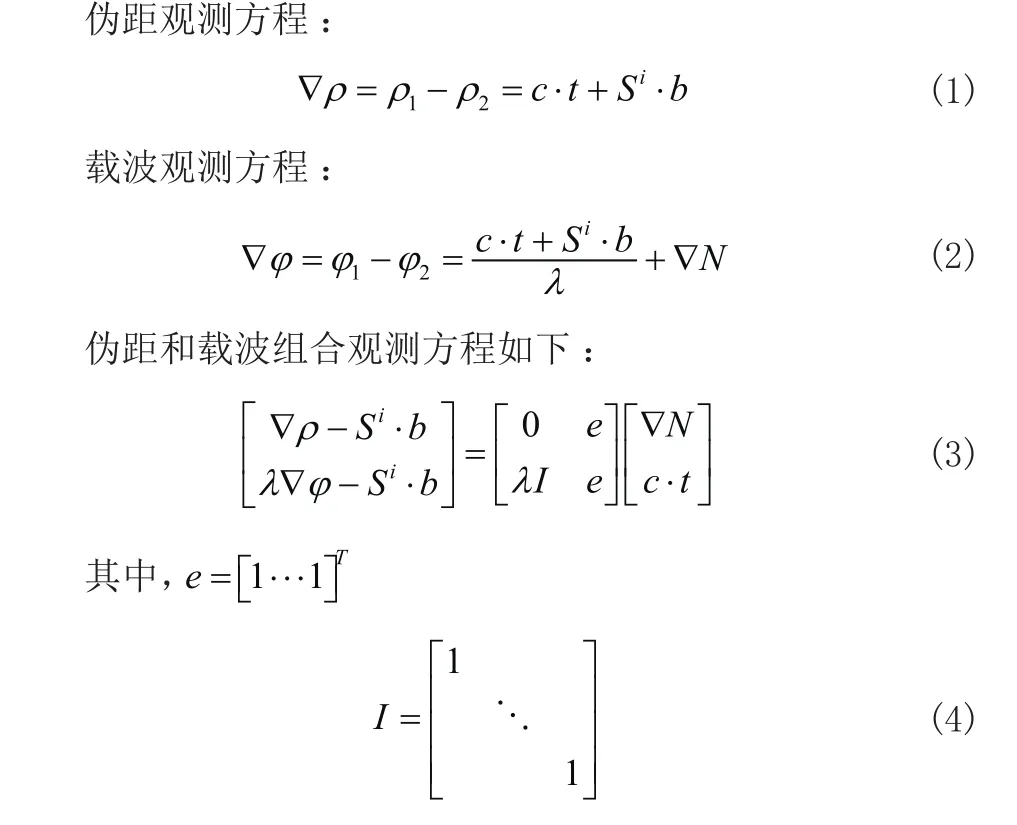
其中c表示光速,t表示接收机相对钟差,τ=c⋅t表示将接收机钟差化为单位为米的量,b表示基线,Si表示第i颗卫星的视向矢量。
通过上述式可以求得单差整周模糊度∇N以及接收机钟差ô。多历元解算有助于提高解算准确性,为了求得初始整周,将多个历元的方程联立求解。计算过程中避免大量的矩阵运算,使用对系数矩阵QR分解的方式对方程进行递归。

3 结论
载波相位观测值测量的是接收机与卫星之间的几何距离,由于卫星轨迹的连续性,因而载波相位测量的值也应该是对连续的星地几何距离的采样,变化应该是平缓的(当然相位观测值中还包含噪声的影响)。若观测数据发生周跳,则会导致观测数据发生突变,产生偏差。周跳探测从本质上讲就是从载波相位观测数据中寻找可能存在的这种偏差。现有的周跳探测方法主要有高次差法、多项式拟合法、多普勒法、伪距载波相位组合法、电离层残差组合二阶历元间差分及TurboEdit 方法。载波相位时间比对过程中,粗差剔除和周跳探测能够有效的减小观测数据突变产生的偏差,载波平滑码伪距使码观测值的精度得到提高,降低系统观测噪声。
