苹果幼果套袋装置设计
2022-03-17潘宗平黄天成袁春洋胡校搏
潘宗平,黄天成,袁春洋,彭 佶,胡校搏
(长江大学,湖北 荆州 434000)
0 引言
高效率、低成本是新时代的一大特征,自动化逐渐变为一种主流趋势,农业机器人技术是当前世界农业机械化研究的前沿领域。机械工作相比人工来说具有效率更高、作业更精确的特点,尤其是当前我国在微电子、传感器等一些尖端领域取得了较大成就,这为农业机器人产业发展提供了良好的技术支持[1-2]。研究了一种手持式幼果套袋机械装置,能实现自动送袋、撑袋以及封口操作,操作简单方便,大大提高了果农套袋效率和质量,适合推广使用。
1 背景
水果套袋能够最大限度地隔绝与外界环境的接触,隔绝农药的残留、减少害虫的侵蚀、避免幼果与树叶枝干的摩擦损伤,对于增加水果光泽,保持水果内部生长的温度、湿度,提高水果品质有着很好的促进作用[3]。套袋技术首次出现在20世纪70年代的日本、韩国、美国,最初主要应用在易受损伤的水果上,例如梨子、葡萄等,经过几十年的发展,各国科学家发现套袋技术对于提高水果品质有很大的作用,因此水果套袋技术几乎应用于所有的水果种植[4]。
1.1 国内研究现状
目前,我国幼果套袋主要分为人工套袋和机械套袋两种;果袋形式主要为塑料套袋和纸袋;传动机构分为摩擦传动和吸盘传动;撑袋机构可以分为粘贴撑袋和机械摆动撑袋两种;封口装置可分为热熔胶粘合、铁丝固定、订书钉封口等方式[5]。我国作为农业大国,在校企融合促进科研的大背景下,水果套袋机构的发展已经日趋成熟,目前针对不同的传动、封口方式,以及不同的水果已经发展出不同的套袋机构,我国各高校及科研院所也对套袋机器人展开了深入研究。
1.2 国外研究现状
目前,国外一些发达国家对于幼果套袋技术的研究较少。日本和美国更加青睐于多功能一体化的机器人,幼果套袋仅作为其中的一项功能。日本和美国都是世界发达国家,但是其国家经济体系构成有很大的区别,日本土地资源较为稀缺,加上劳动力不足等因素,使日本在农业机器人等方面一直走在世界前列[6]。美国地广人稀,农场规模大、劳动力少,因此很难像中国这样通过果农手持幼果套袋机进行工作。其更倾向于利用先进的科学技术,在水果上喷洒一种可降解液体膜,使用化学药剂的方式减少水果的病虫害、保证水果品质[7]。
2 苹果幼果套袋装置的整体结构
本研究的苹果幼果套袋装置主要由三部分组成,分别为储袋机构、送袋机构、撑袋及封口机构,苹果幼果套袋装置总体结构如图1所示。
储袋机构一侧设有送袋机构,送袋机构与储袋机构连接;送袋机构一侧设有撑袋及封口机构;撑袋及封口机构包括滑动的第二滚轮组,第二滚轮组至少有两个相反转向的滚轮,第二滚轮组的两侧设有滑动封口夹;通过第二滚轮组中的滚轮相反转动,使纸袋开口的一侧卡入第二滚轮组中,将纸袋口拉开,然后通过封口夹将纸袋上的铁丝挤压变形封口。
2.1 储袋机构
储袋机构(图2)中的外罩内设有第一支撑架,第一支撑架内设有滑动连接的连接轴,连接轴端部设有压板,压板与第一支撑架之间设有弹簧;压板下方设有滚轴,滚轴与第一支撑架连接;第一支撑架一侧设有第一电机,第一电机通过齿轮传动机构驱动滚轴转动。通过弹簧的弹力将压板与滚轴之间的纸袋压紧。
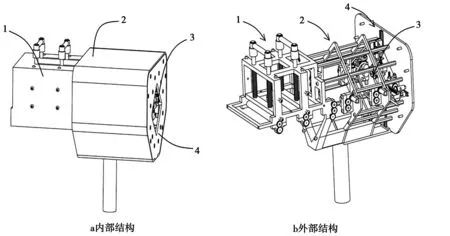
1.储袋机构;2.送袋机构;3.撑袋及封口机构;4.端盖图1 苹果幼果套袋装置总体内部结构图
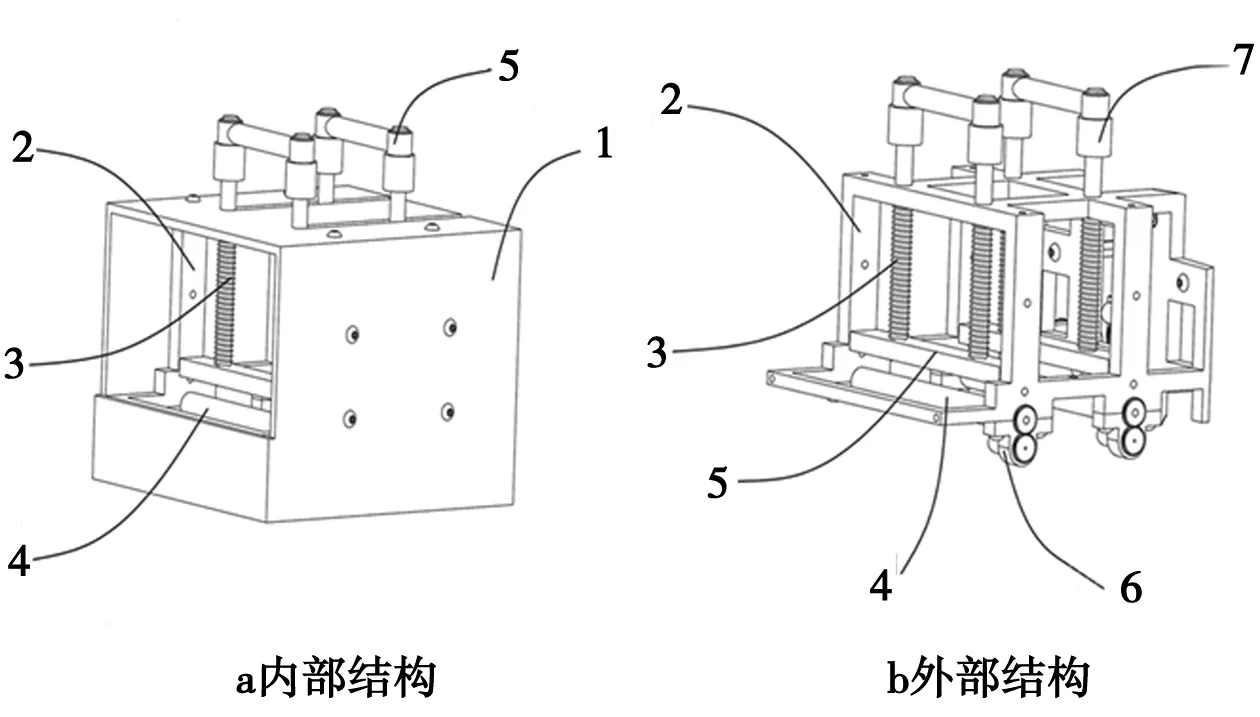
1.外罩;2.第一支撑架;3.弹簧;4.滚轴;5.压板;6.第一电机;7.连接轴图2 储袋机构结构图
2.2 送袋机构
送袋机构(图3)中的第二支撑架内设有多组水平对立安装的第一滚轮组,第一滚轮组通过支撑座与第二支撑架连接,支撑座一侧设有第二电机,第二电机通过齿轮传动机构驱动第一滚轮组中的滚轮旋转。第一滚轮组中的滚轮为2个,2个滚轮旋转方向相反;纸袋两侧夹持在第一滚轮组中的2个滚轮之间,通过2个滚轮相反的旋转摩擦力对纸袋进行输送。撑袋及封口机构中的第二滚轮组一端设有滑动座。第二滚轮组与滑动座滑动连接,第二滚轮组一端设有第三电机(图4),第三电机通过齿轮齿条啮合驱动第二滚轮组在滑动座上滑动。
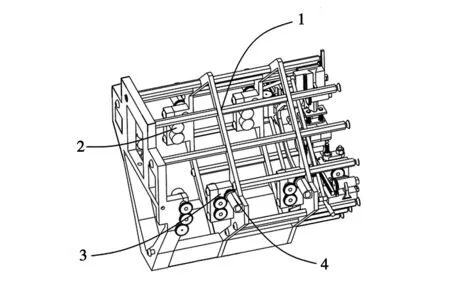
1.第二支撑架;2.第一滚轮组;3.支撑座;4.第二电机图3 送袋机构内部结构图
2.3 撑袋及封口机构
撑袋及封口机构(图4)中的第二滚轮组一端设有滑动座,第二滚轮组与滑动座滑动连接,第二滚轮组一端设有第三电机,第三电机通过齿轮齿条啮合驱动第二滚轮组在滑动座上滑动。撑袋及封口机构一端设有端盖,滑动座一侧设有第六电机,第六电机通过齿轮齿条啮合驱动滑动座在端盖上滑动。封口夹为两个相对滑动的叉形构件,叉形构件的开口部对称布置,叉形构件的开口部相对滑动,使开口部之间形成的空间截面大小往复变化。封口夹一侧设有安装座,封口夹与安装座滑动连接,安装座一侧设有第五电机,第五电机通过齿轮齿条啮合驱动封口夹在安装座上滑动。安装座一侧设有固定座,固定座一侧设有第一滚轮组,安装座与固定座滑动连接,安装座一端设有第四电机,第四电机通过齿轮齿条啮合驱动,使安装座在固定座上滑动,固定座与端盖滑动连接。滑动座与固定座之间设有连杆。
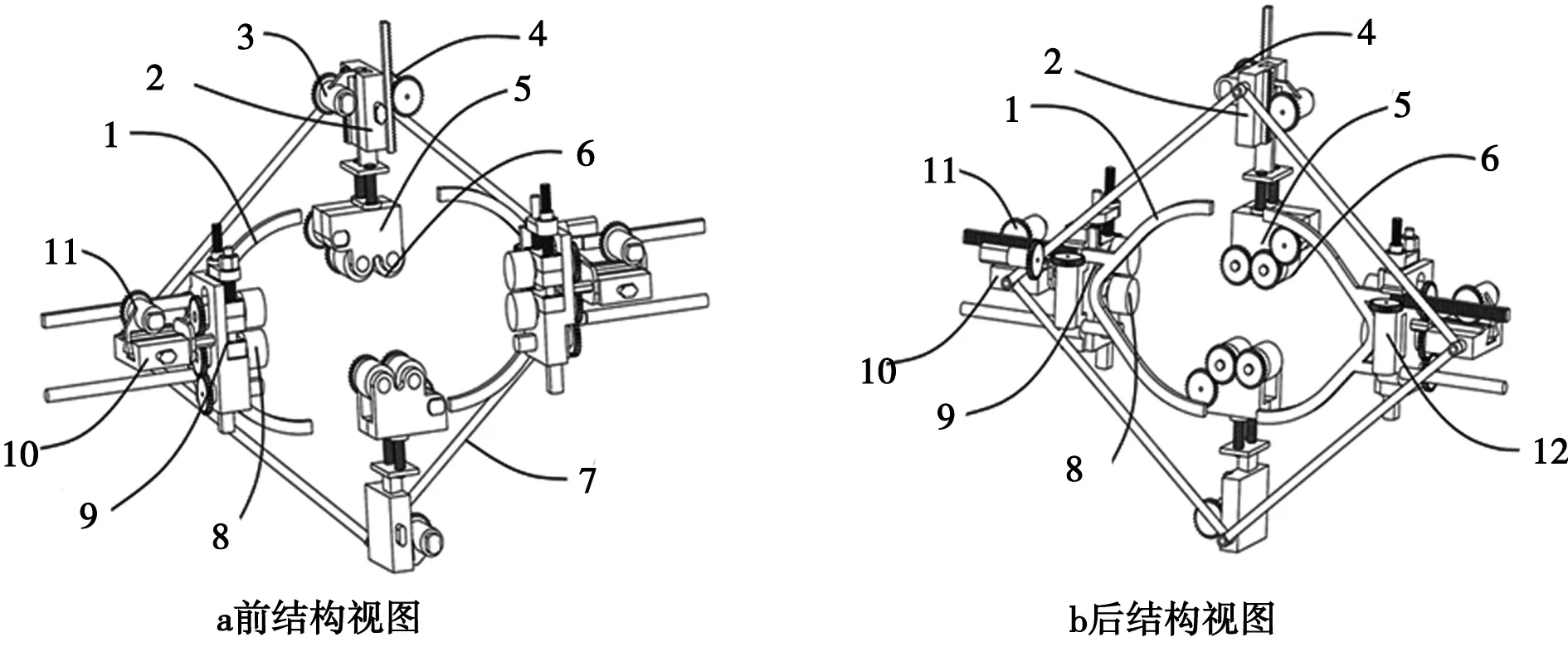
1.封口夹;2.滑动座;3.第三电机;4.第六电机;5.滚轮座;6.第二滚轮组;7.连杆;8.第一滚轮组9.安装座;10.固定座;11.第四电机;12.第五电机图4 撑袋及封口机构结构视图
3 工作原理
幼果套袋机的工作顺序是送袋机构将储袋机构中的果袋送到撑袋及封口机构进行撑袋及封口,最终完成套袋过程。
储袋机构设置有压板、弹簧与滚轴。利用储袋机构所设置的弹簧弹力将压板与滚轴之间的纸袋压紧,确保送袋机构将纸袋连续输送;在储袋机构出口处设置挡板结构,挡板与滚轴之间有一定间隙,该间隙尺寸与纸袋厚度相匹配,以保证滚轴转动时只将一个纸袋输出。通过电机驱动滚轴转动,带动一个纸袋向前移动,纸袋两侧夹持在送袋机构的多组滚轮组之间,每个滚轮组的两个滚轮旋转方向相反,利用相反的旋转摩擦力对纸袋进行输送。多组滚轮组的设置保证纸袋输送的准确性。
撑袋及封口机构设置两套滚轮组,第一滚轮组一端设有滑动座和电机,电机通过齿轮齿条啮合驱动第一滚轮组在滑动座上滑动。第二滚轮组上安装的两个滚轮反向转动,将纸袋开口边缘卡住,然后将第一滚轮组向上移动,实现开袋,操作简单方便。
封口机构封口夹为两个相对滑动的叉形构件,叉形构件的开口部相对布置,能够实现相对滑动,使两个叉形构件的开口部之间形成的空间截面大小往复变化,利用此结构,叉形构件能更好地贴合在铁丝上,通过两个叉形构件行程的空间截面缩小,将纸袋上的铁丝进行压缩至封口。封口夹一侧设有安装座,封口夹与安装座滑动连接,安装座一侧设有电机,电机通过齿轮齿条啮合驱动封口夹在安装座上滑动。利用叉形、对立安装、交错布置的两个封口夹,能够在相对移动过程中使两个封口夹的开口缩到最小,同时保证铁丝变形将纸袋封口。
封口结束后封口夹复位,从套好袋的幼果上取下装置,装置自动再次进行送袋及撑袋,实现连续套装动作。
4 结语
针对苹果生产中幼果人工套袋劳动强度大效率低的问题设计了一种手持式幼果连续套袋机,该装置能够连续实现取袋、撑袋、套袋、封袋及复位功能。整机结构轻便,自动控制,手持操作较为轻松,简单方便,套袋效果良好,能有效降低人工套袋的劳动强度,提高幼果套袋的作业效率。
(03)
