基于LiDAR点云的景观空间“绿视率”量化分析方法研究
2022-03-15成实
成 实
张冠亭
张潇涵
刘奕秋
中国已进入了城市化下半场,十九大报告中明确指出我国正转向高质量发展阶段,需满足人民群众对于美好生活的需求。2018年12月,住房和城乡建设部发布了10项标准,旨在适应中国经济由高速增长阶段转向高质量发展阶段的新要求,以高标准支撑和引导我国城市建设,以及工程建设的高质量发展。在这一趋势下,风景园林领域愈发强调研究与规划设计实践的精细化。
随着计算机技术的发展,二维数字绘图软件和三维实体建模方法的出现,影响着设计师判断决策的途径。时至今日,在风景园林规划和设计实践中这些手段仍有沿用,并且在研究与设计实践中逐渐融入图像、视频、航空摄影、GIS地图和数字地形模型等多种场地勘察及建构手段,从而塑造出更加精细化的风景园林环境。
为应对日益复杂化的风景园林环境,尽管学者们尝试将既有三维数字建模方法加以交互融合,但仍无法精准呈现出风景园林环境多变的空间特征,如植被、山体等要素的形态特征。
自20世纪90年代末起,国内外不同科研机构便开始尝试采用激光扫描技术以获得更精确的地理环境数据。同时,得益于不断增强的数字运算技术,在近20年间,三维点云采集技术得到了迅速发展,随着多领域对于空间数据的需求日益增强,三维激光雷达扫描技术(Light Detection and Ranging,LiDAR)作为获取三维空间信息的新技术手段,突破了传统测量及数字建模方式的局限性,可满足风景园林领域研究与实践中所面临的多样化定量分析需求。
目前,国内外风景园林领域对于点云数据的应用主要有三维模型的逆向建造[1]、植被监测[2-3]、三维景观格局分析[4-7]、古典园林测绘[8-9]、微气候研究[10-11]等多个方面,而鲜有研究利用点云数据针对中微观景观空间形态展开定量分析。作为风景园林领域的一个新兴工具,点云数据集能对各尺度空间进行高密度和厘米级精度记录,相关建模技术的运用从微观层面的复杂植被要素到宏观层面的街区规划及地貌复原均有所涉及[12]。笔者认为,LiDAR点云不仅可运用于风景园林环境信息的采集与分类整理,更可运用于量化解析及评估景观空间形态特征。尤其,针对景观空间中植被形态的量化研究,LiDAR点云相较其他传统数据更具有显著性优势。由此,本文以常用来描述城市植被形态变化的“绿视率”指标为例,试图解答以下2个研究议题。
1)如何基于LiDAR点云技术进行风景园林环境的绿视率量化研究?具体方法及操作途径有哪些?
2)基于LiDAR点云数据的绿视率量化研究具有哪些优势?并存在哪些运用可能性?
1 风景园林领域中“绿视率”指标的计算分析途径
绿视率(Green View Index,GVI)指的是一定视野范围内植被所占百分比,它被证实与人们的身心健康存在着紧密的联系[13-15],是评价风景园林空间舒适性的重要指标之一。
1.1 “绿视率”指标的过往计算方法及局限
传统绿视率指标的计算多依托于实地拍摄的二维影像,用人工方式对图像中的各类景物要素进行分类,再通过计算植被的像素占比获得特定图像中的“绿视率”指数。随着街景图片作为电子地图的全新服务方式被Google、百度等大型地图运营商投入使用,为绿视率的研究开辟了新途径,一些学者利用海量的街景图片结合机器学习、图像分割等技术实现绿视率的自动提取及分析等过程[16-18]。
基于对过往研究文献的梳理发现,过往研究中对于绿视率的分析方法仍存在一定局限性。1)分析视点、视角的固定化及片段化,若需探索不同地点、不同视线方向、不同视野宽度下的绿视率变化,则将拍摄并制作更多二维图像样本以供分析。2)难以消除行人、行车等随机冗余因素,计算结果往往受采集图像影响而可能存在较大误差。3)现阶段相关研究多借助图像识别技术利用开源街景数据计算获得特定街道空间的绿视率变化,反观,风景区、社区公园等大量景观空间则因缺少海量开源摄影数据支撑,并不具备较高适用性。
1.2 利用LiDAR点云进行“绿视率”计算的优势
LiDAR系统一般采用非接触式高速激光测量方式,通过获取激光发射点与目标之间的距离,结合激光发射器的位置和姿态信息进行联合计算,得到目标区域的密集三维坐标及激光反射强度等信息,以海量点云数据的方式呈现[19-20]。随着LiDAR技术的出现及发展可以逐渐弥补目前绿视率计算方式所存在的缺陷。首先,LiDAR点云技术可以实现对研究场景的全方位记录,所获取的点云数据可完整地呈现三维场景信息,在空间分析时可任意选取视点展开进一步研究;其次,可对点云数据加以分类,以剔除随机冗余因素的影响,且不同于传统绿视率分析,借助三维点云数据除了能获取“绿视率”指数外,还可进一步提取植被层次、景深等空间信息,这是传统图像数据所无法实现的;最后,LiDAR系统可搭载不同的平台及移动设备,不受场地的限制,可应用于多种场景的空间信息采集。
聚焦当下风景园林领域的研究与实践诉求,不难发现,借助LiDAR点云技术的“绿视率”计算方法尤为适用于中微观尺度风景园林环境的相关研究及设计辅助,能精细化地呈现出植被等复杂空间要素的形态差异,实现对于景观空间的量化解译。但受制于点云数据体量相对较大,在实际形态量化分析过程中难以运转,故过往研究多停留于对植被等特定景观空间要素的采集与归类。本文试图构建基于LiDAR点云模型的景观空间“绿视率”指标量化解析新方法,以期拓展LiDAR点云在景观空间研究领域的运用途径。
2 基于LiDAR点云的“绿视率”量化分析方法建构
2.1 方法框架
如上文所述,LiDAR点云数据在空间信息采集效率及模型呈现精度上均有着显著的优势,改变并优化了传统景观空间形态分析的过程。本文研究尝试提出了基于LiDAR点云的绿视率计算方法,方法框架包含数据准备、数据处理、空间建模、形态分析4个主要步骤(图1)。

图1 基于三维点云数据的景观空间分析方法操作步骤Fig.1 Operating steps of landscape spatial analysis method based on three-dimensional point cloud data
2.2 具体操作步骤
1)数据准备。
随着激光点云采集技术的发展,车载、机载、手持式激光扫描仪等多种采集方式可满足各类景观空间采集需求。本文选取手持式GeoSLAM的三维激光扫描仪,经提前勘查现场后,展开外业数据采集工作:首先,根据场地现状特征设置闭合采集路线;其次,在采集时将仪器平端于胸前中线位置,以正常步速沿采集路径行走,每间隔百米完成四周全景的定点扫描,其中对于距离道路较远及围合度较高区域,需进一步深入补充采集;最后,经查验后,确保采集信息完整,无缺漏,要素结构体现充分,从而完成研究场地三维点云数据的采集工作。同时,另需准备研究场地的各类矢量基础数据作为后续场地模型校准及分析研究开展的辅助资料。
2)数据处理。
考虑到所获取的研究场地点云数据,往往数据量大且缺少地理参照,需进一步处理以满足后续研究要求。进一步利用Trimble Realworks等软件对原始点云数据进行地理坐标配准、数据清理及重采样等操作,得到研究范围内的精准点云数据;通过软件算法进行点云数据自动分类,再经由人工校准与分类处理;最后,将完整点云数据模型分为地面、植被、建筑及其他4类点云数据层,亦可根据不同研究需求对点云数据进行相应的分类处理。
3)空间建模。
点云模型由若干测试点组成,且测试点之间存在较大空隙,无法直接用于景观空间形态分析,故需将点云数据进一步实体化形成封闭实体。研究选取具有较为完善空间建模及分析工具的ArcScene 10.6平台进行点云模型建模及空间形态分析。首先,在平台中依次添加场地CAD数据和分类后的各点云数据层,分别对植被、建筑、地面、其他4类数据层进行逐一建模处理;其次,考虑景观空间中植被要素形态复杂度较高,且非连续实体面,难以直接利用三角网格面进行表面模型构建。因此,本文采用目前常用的植被建模手段“体素法”将植被点云数据转换为形态相同的体素模型,并利用kd-tree算法对植物点云数据进行邻域检索与精简,在不影响其空间形态的基础上大幅缩减运算数据大小,提升后续量化计算速度;与此同时,在无法获取研究场地完整建筑等要素信息的特定情况下,亦可借助CAD等矢量数据与地面激光雷达相结合的方式补充并校准场地中相应模型数据;最终,构建出可供形态量化分析的三维点云空间数据。
4)形态分析。
在空间模型建构的基础上,依托于ArcGIS平台结合Python编程手段进一步完成对于研究场地空间形态特征的量化分析,并计算出各类三维形态指标的相应数值。其中,考虑目前ArcGIS平台自带的工具集无法满足风景园林环境中各类形态量化需求,故针对不同研究分析的需要,编写对应的算法脚本,确定研究所需的输入条件及输出条件,以及形态量化评定过程。最终,形态量化分析过程与计算结果可通过数值图表、二维栅格图及三维数值分布图等多种可视化表达方式加以清晰直观地呈现。
3 案例运用
3.1 案例选取
为体现出LiDAR点云数据采集场地的可适应性,且考虑到研究对象的普及性及其空间形态的丰富性,本文以住区绿地空间作为研究对象,对基于LiDAR点云的绿视率分析方法加以运用尝试。选取南京河西某小区作为研究样本展开具体分析运算,该小区占地约7.57hm2,绿化率为45%,户外空间面积达4.16hm2,包含水体、植被、微地形、娱乐设施、小型构筑物等多种景观要素,具有丰富的空间形态变化。
3.2 分析方法运用
1)点云数据预处理及三维模型构建。
根据前文构建的方法流程,本研究首先用GeoSLAM手持三维激光扫描仪对研究场地进行全面扫描,并对所采集的原始数据利用Realworks进行点云分类,通过自动处理与手动纠错2种模式对场地点云进行较为准确的分类,具体分为建筑、地面、植被、其他(含路灯、坐凳、垃圾桶等)4类。其中,通过ArcGIS结合python编程处理将植被及其他景物信息以体素的形式构建,地面点云则以数字高程模型的形式呈现。考虑地面激光扫描设备对于高层建筑信息的采集能力相对较弱,造成建筑顶层空间信息的缺失,所以在建模过程中会采用矢量信息根据建筑轮廓及高度对建筑三维模型进行构建及补充,以保证场地空间模型的完整性(图2)。

图2 研究场地的三维场地模型构建流程Fig.2 Construction process of 3-D point cloud model for research site
2)绿视率指标计算。
本文通过在三维点云模型中模拟人群在住区景观内部的所视绿化情况,从而分析计算出从该视点所观测到的周边环境绿视率指数。具体分析步骤如下。
首先,根据正常人眼视高及视野范围,在该研究视点模拟出视高1.6m,水平视野360°,垂直视野120°(视线水平上侧50°、下侧70°),视线长度为300m的完整视野范围进行分析。其次,在确定完整视野范围后,由该视点发射出水平及垂直视角均为2°间隔的300m构造视线,共生成5 400根三维构造视线,从而形成完整的视线罩面。再次,利用ArcGIS三维分析模块中的通视分析功能计算各构造视线中的通视视线及不可视视线,确定该视点下的人眼可视范围及所视空间要素的编号信息,再通过要素编号明确各通视视线所观看到的具体空间要素。最后,根据计算获得的三维可视视线及可视空间要素,经进一步处理获得该视点下的360°全景视野立面(图3)。

图3 研究场地“绿视率”指标计算过程Fig.3 The calculation process of site GVR
3.3 与传统计算方式对比
为总结出基于三维点云模型的空间形态量化方法优势,将各测试点基于点云模型的绿视率分析结果与传统计算途径所得到的计算结果加以对比及分析。
1)传统“绿视率”指标计算方法。
文中除基于三维点云数据的“绿视率”指标量化计算方式外,另选取了过往研究中常用的2种分析途径:传统人工分类的“方格测量法”及机器自动分类的“图像识别分析法”,对相同视点下不同途径所测算得到的“绿视率”结果加以比较(图4)。
(1)方格测量。
采用方格测量分析,需通过Photoshop CC对照片加以处理,以30×40个透明方格网完整覆盖测试照片样本,再由人工判断各方格中包含的要素内容,并用不同的颜色代表植被、建筑、地面、天空、设施等,最后统计各要素所占的格数,从而计算出各要素在总图面中所占的比重。
(2)图像识别。
采用图像识别分析,本文使用的原始图片分辨率为4 032×3 024,主要借助机器学习技术对样本图像信息加以处理与分析,这亦是目前常用的“绿视率”计算方式之一。本文选择Deeplab-v3+模型进行图像处理,并利用数据集“Cityscapes Dataset”进行图像识别训练,最后输入测试照片样本。
2)3种计算方式对比。
为证明基于LiDAR点云的“绿视率”计算方法的可靠性和适用性,选取了该小区中4处存在明显空间差异的景观节点,分别涵盖水景、游乐设施、停车场等各类景观要素,且各节点间呈现出较为明显的植被分布密度差异,具有较为典型的研究意义及价值(图4)。对各节点计算结果进行对比分析,总结出以下3点优势。

图4 4处节点“绿视率”计算结果汇总Fig.4 Summary of the GVR calculation results of 4 nodes
(1)分析高效性。
利用本文提出的方法,对研究小区进行整体空间信息采集用时约6h,并且采集过程中可通过采集设备实时观察数据的完整性,及时对遗漏区域进行复采或校准,后续分析中可根据研究需要在测试模型中选取任意测试点加以分析计算,不仅可计算出任意测试点下的全景绿视率,更能进一步计算出该视点在不同视距下的可视绿化层次与相应面积(图5)。而无论方格测量抑或图像识别2种计算方法,均需要研究人员实地拍摄,本文采用的是传统相机(焦距35mm),一张摄影图像仅能表示单一视点在单一视线方向的画面,若需单视点多方向或多视点的画面则需要人工逐一拍摄,令数据采集与分析时间不可估计。

图5 基于点云分析的“绿视率”计算结果(含:全视景及绿化层次)Fig.5 GVR calculation results based on point cloud analysis (including: panoramic view and greening level)
(2)数据准确性。
在传统绿视率计算方法中,图像识别可基于原始图像分辨率进行计算,而方格测量则需要降低图像分辨率以减少人工成本。但由于目前图像分割技术所依托的开源数据集多为国外街景数据,应对本文研究对象住区绿地景观则分割效果相对较差,往往人工方式的准确率较高,因此本文以方格网测量结果作为参照值进行对比。3种计算方式的绿视率对比见表1,从表中可以看出4种不同场景下点云模型与图像识别的结果精度基本相当,视点2、3、4的误差都在10%以内。图像识别与点云模型误差最大值均发生在视点1,点云模型的误差值达77.69%,经分析原因有二:其一是现场的电动车及行人对植被产生了一定遮挡,但点云模型不存在这些冗余信息,所以计算结果为未被遮挡下的真实植被情况;其二是该场景中地下出入口周边挡墙在点云模型中未能很好展现,导致绿视率计算结果偏高。

表1 不同方式下“绿视率”计算结果对比Tab.1 Comparison of GVR calculation results in different ways
(3)结果全面性。
针对特定视角而言,传统方法与点云均可获取到相应“绿视率”指数变化,而点云数据的分析优势体现在其可以进一步提取全景视角下的三维空间信息,如三维视野体积。三维视野体积描述的是视点与某一景物之间的三维可视空间体积,可以进一步量化人们的空间感知。三维视野体积越小,说明观察者与某一类景物之间的空间比较局促,包围感更强。进一步可以利用三维视野体积定义“三维绿视率”指标,即植被的三维视野体积占总视野体积的百分比,更直观地量化人与绿色空间的关系。以视点3为例,表2列举了基于点云数据所得的多项三维空间信息。综合对比所分析的4类景观节点下的绿视率变化,不难发现,应对不同景观环境特征时,基于LiDAR点云数据的绿视率分析均显现较高的数据精准度,不仅能全方位提取出各类复杂景观环境中的植被要素特征,更可以有效划分出水体、游乐设施等多种景观要素与绿化植被之间的空间关系。
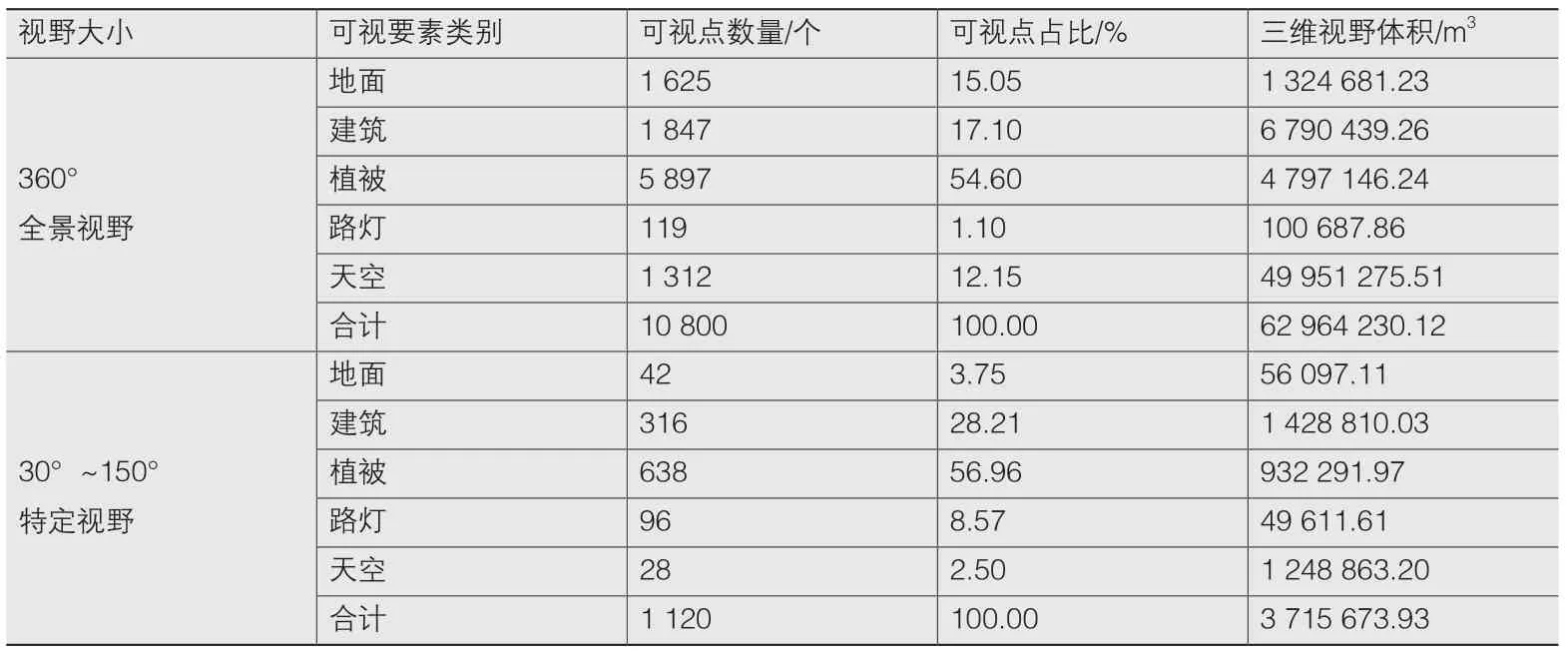
表2 基于点云数据的“绿视率”计算结果Tab.2 GVR calculation results based on point cloud data
3)点云分析方法优势。
对比3种分析方式下所得到的“绿视率”指数可发现,虽针对特定研究视角3种分析方式的计算结果差异相对较小,但如前文所述,基于三维点云模型的景观空间形态分析优势实则体现在“分析高效性”“结果全面性”“数据准确性”3个方面。具体而言,点云数据分析在大幅度提升景观空间模型采集、建构及分析流程中转换效率的基础上,更加符合人群在实景空间中全景式的真实视觉感受,亦可反映出景观空间中植被、建筑、构筑物等多种要素在各角度下的形态细节变化特征及相应指标变化,实现从人群真实视觉感受对景观空间形态及各要素加以评估。而传统景观空间形态量化仍多以二维图像为依托,存在分析视角的局限性,相关分析结果往往受到拍摄视角、区位等多方面因素影响,无法展现出景观空间中多尺度、多视角下植被等复杂要素的形态变化特征。
4 讨论及展望
4.1 价值与不足
本文所提出基于LiDAR点云的景观空间“绿视率”量化分析方法相较于过往在精准度、计算效率等多个方面均有所提升,在景观空间研究与实践过程中均具有较高适用性。对于实践而言,借助三维点云模型的形态量化研究将便于设计者及决策者更加清晰地了解景观空间的形态特征及场地条件,从而辅助景观空间的精细化评价、设计与营造;对于研究而言,基于LiDAR点云的景观空间绿视率量化分析方法提升了既有风景园林领域研究的分析精度与效率,更适用于“生态”“人群”等多个方面与空间“形态”间的关联性探讨。
与过往研究相比,本文为实现在景观空间研究全过程中充分利用LiDAR点云数据的优势,不再仅局限于采集、处理与建模等环节,拓展了点云数据在“量化分析”中的运用可能。以“绿视率”指标为切入点展开了研究尝试,借鉴于过往生态学及植物学领域中“体素化”的植被建模途径,将复杂、细碎的植被形态转化为可供分析计算的实体模型;并在此基础上,在已转化的点云模型中模拟真实的人眼视域特征,以分析评估各视角下植被的景深层次等变化。一方面,突破过往绿视率计算方式多依托于二维图像分析的缺陷;另一方面,拓展了LiDAR点云数据的分析运用途径。
但不可否认,基于点云数据的景观空间形态量化研究在数据处理难度上仍存在一定局限性。既有研究及实践中借助三维点云采集技术虽可精细化呈现出景观空间中植被等复杂要素的物理形态特征,如通过三维点云数据对城市街道树木整体形态及其枝干树叶形态精确建模[21]、树群间景观格局与连通性[22]、城市三维绿量计算分析[23]等,但受技术限制,现阶段对于单株植被等复杂要素的自动分割仍具有较高挑战性。因此,目前在景观空间量化研究中植被的形态仍有所简化,需进一步探索如何精确量化其形态特征。
4.2 运用前景
从运用前景来看,基于三维点云模型的空间形态量化分析在未来的研究与实践中均存在积极促进作用。不仅可以结合“健康城市”“碳中和”等当下发展挑战对景观空间形态加以量化探析,也可以辅助风景园林设计方案的生成与测试实践场景开发。
结合当下发展诉求及所面临的实际问题与挑战,现阶段景观空间的相应研究手段愈发数字化及精细化。基于三维点云模型的景观空间量化分析方法作为精准量化解析景观空间形态特征的新途径,不仅对传统形态量化方法进行了优化提升,也拓展出更多景观空间三维形态量化研究的可能性(如三维可视体积等),并可结合人群视觉偏好、心理健康、微气候等多个方面的研究视角进行探索。例如,结合AR、VR、MR等虚拟呈现手段用于特定景观环境中人群偏好及身心健康的评估。
与此同时,辅助设计方案生产及测试场景开发亦是基于三维点云模型形态量化研究的又一重要运用途径,其对于设计场地特征的细节表现能力将极大推动当前设计实践中的方法探索。可根据形态分析结果,对场地现状点云模型进行拆解、重组并逐步优化,避免了实践过程中的不必要操作。
注:文中图片均由作者绘制。
