一种高噪声低照度图像的隐藏特征修复算法
2022-03-15邓丹君马承泽
邓丹君,马承泽
(1.湖北理工学院计算机学院,湖北 黄石 435002;2.长春工业大学数学与统计学院,吉林 长春 130012)
1 引言
目前,随着高光谱和红外成像技术的不断发展,电子成像已经成为生活和工业领域中不可或缺的一部分。但是由于受外界因素的影响,会导致成像图出现低照度的现象,干扰因素多有摄影环境较为暗淡、光照较低、曝光量不足等,这些因素的存在还会引起一定的图片对比度降低、噪声增大、整体灰调加强等问题。若不进行相应的处理,那么这样的图像不仅模糊不清晰、观感较差,并且还不利于后期电子视觉技术的处理。因此,此时就需要一种基于低照度图像的修复方法,利用特定方法对图像进行处理,加强图像的可视性、提高清晰度、便于观察,还有利用后期的分类、分割以及其它技术手段的实施。近年来,对于图像照度的增强及修复一直是成像技术领域的研究热点。
文献[1]提出基于NSST多尺度自适应的Retinex低照度图像增强算法。通过对照不同图像的照度平滑分量和反射平滑分量来进行具体降噪处理。但由于在实施平滑对比时,会使图像通过重构来保证照度平衡,但此过程易丢失图像的原始细节,造成成像毁损,总体效果欠佳。文献[2]提出基于边缘特征和像素结构相似度的图像修复算法,通过获取一定手段获取到低照度图像的灰度分布数值,借此对样本图像进行条件约束,使得视觉效果得到一定的提升。该方法对于细节处的照度提升效果较好,但整体的水平对比度不高且容易丢失高帧信息。
为解决上述传统方法出现的问题,本文则采取一种基于交替优化的隐藏特征修复算法,帮助低照度图像提升可视性和清晰度。通过对隐藏特征的细节修复可帮助图像减少色彩偏差及噪声的问题,在一定程度上就是提高了图像的可视光照,在根源上解决低照度问题。仿真结果证明,基于本方法下的图像修复效果要远优于文献方法,并且基于平均梯度和信息熵的参数对比下,综合性能都是极为优异的。
2 低照度图像亮度特征变换
通过低照度图像隐藏特征细节提升方法,可帮助后续的特征修复。将低照度图像设置为P,正常图像平均亮度L与其反射图像R的乘积可表示为以下关系
P=R∘L
(1)
其中,∘表示算子矩阵中的对应相乘元素。
根据上述的一般照度反射模型,可以模拟从低照度到高照度过程中原始图像特征的自适应能力,对其进行研究分解就可得到以下特征变换形式
(2)
其中,Rσ表示特征的尺度数值;σ表示高斯函数;为避免分母为0,ε的最小取值为最小正整数。基于此,就可将所有实际图像的特征参数代入到此公式中,计算特征变换的细节数值。
3 暗适应函数下特征尺度衡量
由于在多数的低照度图像中,其HSV(Hue,Saturation Value色调饱和度值)色彩空间[3]均为第一视角出现面向视觉用户的,因此考虑到实际环境因素,CMYK(青Cyan 红Magenta 黄Yellow黑Black)色彩模型[4]是最适应于实际情况同样也是最符合肉眼的直观感受的。其CMYK色彩模型主要采用一种光照饱和度[5]相减的原理,将所有反射光线都转换为对应的色彩,当全部颜色进行叠加时就表现为黑色,那么当没有任何颜色引入时就表现为白色。这样在最大程度上保证了图像色彩的均匀分布、提高直观性。
根据上述模型建立相应的特征分量数值[6]表示为V,并且该分量值还与色彩分量实现完全分离的状态,这样就可保证二者之间互不干扰,也就不会出现色彩失真的情况。以此为基础,提取图像的特征分量数值V表达公式为
V=max(R,G,B)
(3)
式中,V表示为特征的分量数值;R、G、B分别表示图像中的三种通道。
在图像饱和度较低的情况就容易形成低照度的现象,因此就需要建立两种适应函数[7]分别对应实施具体特征修复算法。其中,在图像呈暗适应的环境下,就需要先增加外界光线的射入,从而达到提高整体图像亮度的效果。因此在外界光线较暗或缺少大面积光照的情况下,就需要通过增加特征分量数值来提升全局图像的饱和度。具体操作步骤如下:
1)以特征分量数值V为参照标准,通过中值滤波方法去除图像中亮度较低的像素点,得到去除后的参数表示为Vfilt,表达式为
Vfilt=medfilt(V)
(4)
式中,medfilt(V)表示根据特征分量数值V进行的中值滤波[8]。
2)将图像内部集中在低照度周围的像素点[9],按照既定参数进行等比例的调整及拉伸至整个低照度区间,至此得到拉伸后的参数表示为Vstr,具体表达公式为
(5)
式中,max(Vfilt)表示进行中值滤波操作后的最大参数值。图1为特征分量数值V以及进行拉伸后的特征分量数值Vstr的具体直观直方图,图2则为特征分量数值V以及进行中值滤波后的特征分量数值Vstr。

图1 基于特征拉伸后的分量V的直观图
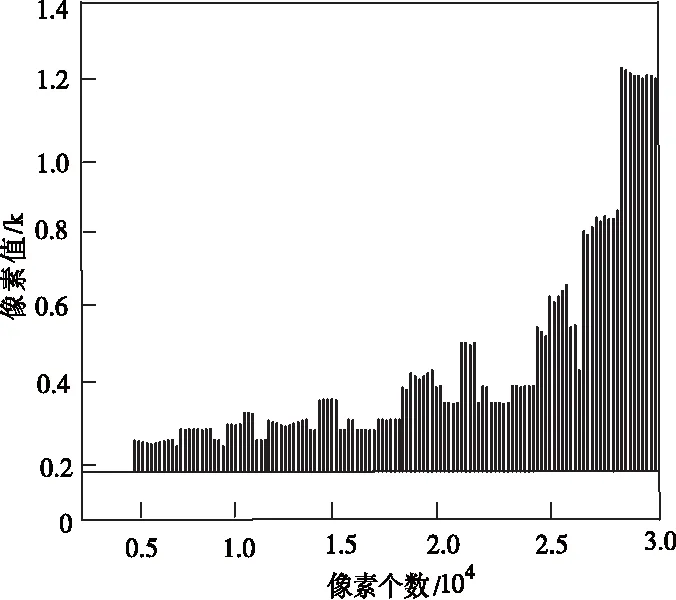
图2 基于中值滤波后的分量V的直观图
根据图1和图2可以明显看出,经过不同程度的拉伸和中值滤波操作后,全局图像的亮度都得到了一定程度的提升,这足以说明基于中值滤波和分量拉伸都会使图像提升饱和度,进而提升细节特征的直观性,为后续的图像修复打下良好的基础。
为提高在低照度环境下隐藏特征的修复效果,需要引入一个重要暗区增强步骤,该操作可以模拟设计一个符合暗适应环境的非线性特征映射函数[10]表示为f(x),并且x∈V。由于该线性映射函数对低照度区域的亮度增强较大,因此容易出现色彩失真[11]现象,这时就需要采用亮度增幅较小的非线性特征映射函数来进行隐藏特征的修复。为了确保算法效果本文分别采用了3种函数来进行,具体表达式为
y=1-(x-1)2,x∈[0,1]
(6)
y=xa/3+1/3,a∈[0,1],x∈[0,1]
(7)
(8)
公式中,a表示自适应的特征调整参数;x、y分别为函数的参数值,其基于3种函数下的暗适应隐藏特征变化情况如图3所示。

图3 暗适应的特征参数变化
从图3中可以看出,式(8)的隐藏特征变化曲线对比式(9)和式(10)的变化曲线具有更好的特征细节增强效果,但由于式(8)的函数关系没有进行参数调整,导致其无法适应低照度的图像环境亮度。综合对比下,基于式(9)的非线性隐藏特征的映射函数是最符合暗适应过程的,没有因过度增强而出现失真情况,整体性能保持效果较好,为进一步提高该函数的特征细节增强效果,将其进行一定局部调整表达公式如下
y=-ax2+(a+1)x,a∈[0,1],x∈[0,1]
(9)
基于此非线性隐藏特征映射函数表达式,给出自适应的特征调整参数a随暗适应函数的变化曲线,如下图4所示。

图4 暗适应的特征参数变化
从图4中可以看出,相比之下基于暗适应的函数变化曲线有着明显优势,其对图像暗区的亮度增强速率不会过快且对于像素特征的拉伸区域不会过大,这样就不会出现过度压缩的状况。当参数a逐渐增长时,暗区内的照度增长能力就会越来越强。
将经过拉伸后的参数Vstr式(1)代入到映射函数式(5)中,就可得到基于二者关系下的暗适应函数VD为
(10)
基于此公式,可直接决定根据自适应参数a决定的函数VD的幅值增强强度。借此,可给出自适应参数的计算公式为
a=1-mean(Vstr)
(11)
式中,mean(Vstr)表示特征分量的平均数值,其数值变化的大小可以对图像的光照情况实现有效尺度衡量[12]。
4 特征信息的交替优化融合
建立一个跟随隐藏特征灰度值变化而增加的抛物线函数,基于此函数计算特征值的衰减程度进而得出交替融合参数k的取值,表达公式为
VD=k×a+(1-k)
(12)
其中,k表示融合参数,图5为基于隐藏特征的交替优化交替融合函数。

图5 交替融合增强函数
可以看出,与函数直线y=x对比,此融合曲线的增强效果较好,在像素值较低的区域内也并没有出现降低的情况,并且对高像素值有一定的抑制效果,更加符合肉眼观看的视觉需求。
5 实验分析
5.1 实验环境
为验证基于本文方法对图像隐藏特征修复的正确性和有效性,将采用Imagenet数据库作为本次实验的图像采集数据集,该数据库内包含大概2万多个图像类别,并且这些图像都有对应的类别标识,帮助查找和分类。文档记录详细、应用方便是目前各类技术应用领域中的首选,对于多种图像的定位、检测以及研究分析都有着重要的作用。
为保证实验数据的真实性和可对比性,在全部的图像样本中选取了不同背景情况、不同的动态特征以及不同光照条件下的真实图像,实现有效对比,确保结果的准确性和合理性。
5.2 低照度图像修复效果对比分析
图6为基于三种不同方法下的低照度图像修复效果,通过对比分析得出具体的实验结果。

图6 不同方法图像修复对比结果
从图6中可以看出,文献[1]算法处理后的图像整体色彩亮度较高,但部分区域出现了异常失帧现象,导致图像中出现了大量噪声像素点影响整体饱和度、使图像变得模糊不清。文献[2]算法处理后的图像也出现了同样的问题,并且对图像低照度的调整效果也整体较差,图像的整体色彩饱和度与原始相比,照度提升效果并不明显,整体处理水平欠佳。造成视觉效果不佳的主要原因就是,没有充分考虑到原始图像像素点的动态变化特征,没有选定正确的光照参数来对其进行照度增强,从而导致图像光照不均匀且噪声明显,致使整体色彩表现不清晰。
相比之下,本文算法修复后的图像与原始图像相比,整体色彩及照度都得到了明显的提升,没有出现任何的噪声、光晕、色彩失真或偏移的现象,整体色调保持在一个稳定的位置,在保证照度变动范围的同时还能在最大限度还原原始图像的细节,增强视觉效果,达到这种低照度图像修复的效果。这主要是因为本文分析了低照度图像的隐藏特征信息,对其进行一定的尺度分解,这样不仅可以提升图像在饱和度、对比度以及细节信息等多个方面的照度增强效果,还可对不同的图像根据对应的结构及细节信息划分不同的尺度,在最大程度提高隐藏特征的修复效果,也就同样提高了图像修复的效果。
5.3 综合性能对比分析
给出以下几种评价指标,对实验效果进行具体分析:
1)平均亮度。
(13)
其中,i为常数且i=0,1,2…,La(i)表示R、G、B三种图像通道的平均亮度,可根据正常情况下的最佳数值127.5进行数值归一化处理,此数值越高表示图像的亮度越高,修复效果越好。
2)SSIM(Structural Similarity结构相似性)。是衡量不同图像相似度的重要指标,设两幅图像为x和y,计算公式为
(14)
式中,μx表示图像x的平均值;μy则为图像y的平均值。相似性数值的取值范围为-1~1,此数值越趋近于1,就表明图像x与图像y的特征相似度数值越为接近。
3)信息熵
(15)
信息熵数值主要通过同色调图像的分布函数计算可得。一般情况下,图像的信息熵数值都是在成像前就已经固定,并且信息熵的产生是因为图像中出现了噪声数据的影响,因此图像中的噪声越多,说明其对应色彩图像的信息熵数值就越高,图像的清晰度也就越差,修复效果欠佳。
从表1中可以看出,基于文献[1]方法的平均亮度数值是最高的,但是与原图特征细节的相似度数值是最低的且信息熵数值是最高的,这时说明该方法虽然对图像亮度的调整效果较好,但是由于过于注重图像低照度问题,反而忽略了图像自身的异常数据问题,导致图像的原始特征丢失、噪声数据增多致使图像出现模糊不清晰的现象。

表1 不同算法指标对比分析
本文方法则是综合了所有已发生的现象,在进行隐藏特征修复时,对所有可能出现的问题都提前做好准备确保不会出现色彩失真、噪声及色彩偏移等现象。在不破坏图像原始结构的同时,还能确保所有数据都保持在恒定的位置,提高色彩分辨率以及饱和度,实现有效的隐藏特征修复方法。
6 结论
本文在保持原始图像自身特征属性数据不变的情况下,提出了一种基于交替优化的低照度图像隐藏特征修复算法,主要工作为利用暗适应函数查找并修复隐藏特征,进而提高图像亮度。仿真结果证明,本文方法不仅对图像隐藏特征具有较好的修复效果,而且还不会破坏原始图像的数据特征,也不会出现色彩失真或偏移以及噪声现象,整体修复效果优异。
