有人/无人机协同森林灭火作战体系结构设计*
2022-03-14陈子健
覃 睿,陈子健,闫 玲
(中国民航大学 交通科学与工程学院,天津 300300)
在传统森林航空消防体系中,有人机(manned aerial vehicle, MAV)通常负责执行日常巡护、火场侦查、空中灭火等多项作战任务。但由于目前存在飞机机源总量不足、机型单一、空中直接灭火能力不足等问题,飞行员在执行任务时往往要承担较大的安全风险和工作负荷。而无人机(unmanned aerial vehicle, UAV)具有成本低、费效比高、生存能力强、机动性能好、环境生存能力强等诸多优势,可辅助或代替有人机在复杂严峻的火场环境下执行多项灭火任务,这不仅可以减少有人机执行任务的风险,还可以一定程度上降低任务成本,因而备受森林消防队伍青睐[1]。
现阶段,关于MAV与UAV协同的研究主要集中在军事作战领域,其重点研究方向主要包括:系统架构设计[2-4]、协同路径规划[5-7]、协同编队控制[8-10]、协同作战能力评估[11-13]、协同作战决策[14]等。针对MAV/UAV协同作战体系结构的相关研究较少,将其应用于森林消防领域的研究更是几乎空白。随着UAV在森林消防领域的广泛应用,UAV如何与MAV相互补充、相互配合形成整体灭火力量将成为拟解决的关键问题[15]。
然而,MAV/UAV协同森林灭火作战体系结构复杂,指挥节点繁多。还涉及到飞行管制、气象条件、通信情况和火场态势等诸多影响因素。并随着体系内多种UAV智能化、自主化的发展,其智能因素与MAV驾驶员的人因因素也应被重点考虑。为了提高MAV/UAV协同森林灭火作战体系结构的互操作性以及减少或避免多重指挥、单一指挥或无序指挥的现象发生,亟需一种统一框架下的体系结构描述方法。
鉴于美国国防部架构框架(Department of Defense architecture framework, DoDAF)在复杂组织架构开发方面具有很强的规范性和指导性,本文从顶层设计理念出发,基于DoDAF作战视点设计了一种MAV/UAV协同森林灭火作战体系结构,全面描述了MAV/UAV协同森林灭火作战指挥控制关系,深入剖析了该体系的运行机制。另外,为满足多种机型联合灭火的需求,在MAV/UAV协同森林灭火作战体系结构设计过程中还重点考虑了UAV控制权转移、灭火策略与战术选择等对消防模式的影响。以期推进新型灭火力量融入传统的森林灭火指挥作战体系,有助于提升多机协同联合灭火作战能力,更好地应对森林火灾中瞬息变化的火场态势。
1 基于DoDAF的体系结构设计
1.1 DoDAF概述
DoDAF2.02版本是在自动化指挥系统(C4ISR)框架的基础上,借鉴了英国国防部体系结构框架(MoDAF)、北约体系结构框架(NoDAF)和开放团体体系结构框架(TOGAF)中的优秀成果,经历了DoDAF1.0版、DoDAF1.5版不断地继承、完善和发展形成的。可以为集成体系结构的开发提供重要指南和标准,旨在提升能力之间和被集成的体系结构之间的互操作性,实现有序的信息共享,提高关键决策的能力[16]。DoDAF2.02版以数据为中心,可遴选8个视点(图1)。从不同层次、对象、因素对研究对象体系结构进行了分析,可对复杂系统的体系结构进行规范化的描述。尽管模型众多但并不强制性使用,开发者可根据任务需求及自身目的,结合“适用”原则,裁剪选择合适的视图。

图1 DoDAF 2.02体系结构视点
其中作战视点是其他视点产品的基础,它以任务或作战过程等为基础,集中反映实施作战所需的任务、活动、作战要素以及资源流交换,详细描述信息交换的种类和性质等,其基本构成和简要概述如图2所示[17]。

图2 作战视点构成及概述
为进一步描述和构建MAV/UAV协同森林灭火作战体系结构框架,明确MAV/UAV协同森林灭火作战使命和作战任务,描述灭火作战过程与各作战节点之间的连通性。本文将从作战视点角度,对MAV/UAV协同森林灭火作战体系进行可视化建模分析,构建的作战视点模型在下一节会详细介绍。
1.2 设计流程
结合MAV/UAV协同森林灭火的特定作战任务背景,按照DoDAF作战视点对该体系结构的分析逻辑顺序,设计流程如下:
(1)界定MAV/UAV协同森林灭火顶层作战概念。基于MAV/UAV协同森林灭火作战使命,分析MAV/UAV协同森林灭火作战概念与功能需求,以图形和文本描述直观描绘顶层作战设想,展现协同灭火作战目的和架构,分析体系结构和外部系统之间的相互作用。
(2)厘清MAV/UAV协同森林灭火作战体系各作战节点之间的组织指挥关系。梳理MAV/UAV协同森林灭火作战体系的功能关系、组织关系,确定各个作战节点之间的指挥层级,明确隶属关系。
(3)探究MAV/UAV协同森林灭火作战体系中各节点的链接关系与信息交互情况,建立作战资源流表述模型。详细描述灭火作战任务中的资源交换以及各作战节点间信息的流动情况。
(4)剖析MAV/UAV协同森林灭火作战过程。考虑不同作战阶段和节点间功能的差异,采用作战活动模型描述MAV/UAV协同森林灭火作战活动的先后顺序和相互关系,建立作战状态转换模型反映节点内部状态的转换关系。建立作战事件跟踪模型表示节点间因果顺序关系对外界触发的响应。
2 MAV/UAV协同森林灭火作战体系结构模型
本文以某地高山林区发生森林火灾为例,受地形地貌、森林面积及林内复杂环境等多方面因素限制,仅考虑采用MAV与UAV协同执行森林灭火作战任务。通过对任务执行过程中MAV/UAV的动态行为和体系结构特征进行分析,建立如下模型。
2.1 顶层作战概念图
森林火灾场景下MAV/UAV协同参与灭火作战任务流程是:林火发生后,总指挥调度中心向MAV与UAV地面控制站下达灭火任务,UAV地面控制站控制小型UAV编队搭载光电吊舱等探测设备前出火场开展侦查,并控制重型UAV编队装载灭火弹飞至火场附近某聚集点汇集待命。小型UAV编队在抵达火场后,获取森林火灾现场实时图像,第一时间上报火场地理坐标、过火面积、火场蔓延趋势等火场态势信息,同时对火头、火翼、火尾保持监测。UAV地面控制站将处理后的火场信息发送给MAV,MAV根据信息决定出动架次,寻找水源并吊桶取水,随后赶往火场附近聚集点处接收重型UAV编队控制权形成混合编队前往火场进行灭火,同时接收小型UAV编队控制权继续跟踪监视火势并于灭火完成后进行灭火效果评估。
通过对灭火作战任务流程的分析,在MAV/UAV协同森林灭火作战体系当中会涉及到总指挥调度中心、MAV、UAV地面控制站、小型UAV编队、重型UAV编队及导航、通信卫星等多个作战节点,由此可以建立顶层作战概念图(OV-1)(图3)。
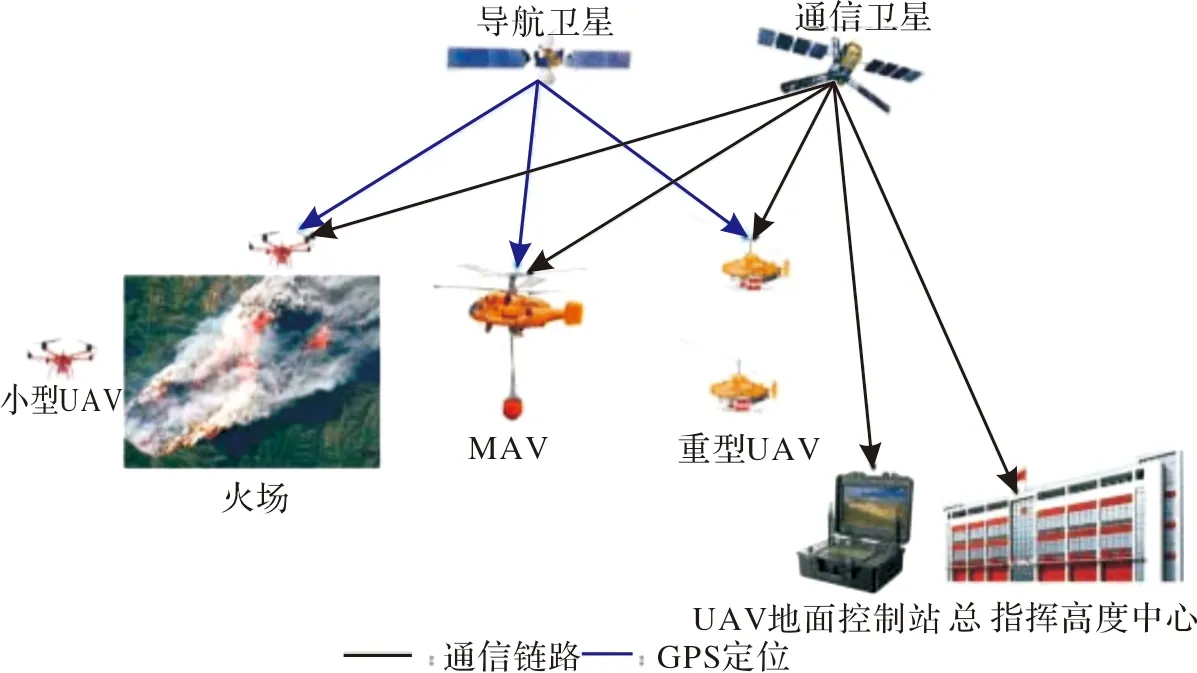
图3 顶层作战概念图
2.2 组织关系图
在灭火作战过程中,各作战节点通过资源整合和协同组网,构建出森林火警监测系统、联动指挥控制系统、应急通信系统、情报支援系统,并主要以协同关系和指挥控制关系连接在一起[18]。如图4所示为MAV/UAV协同森林灭火作战体系的组织关系图。
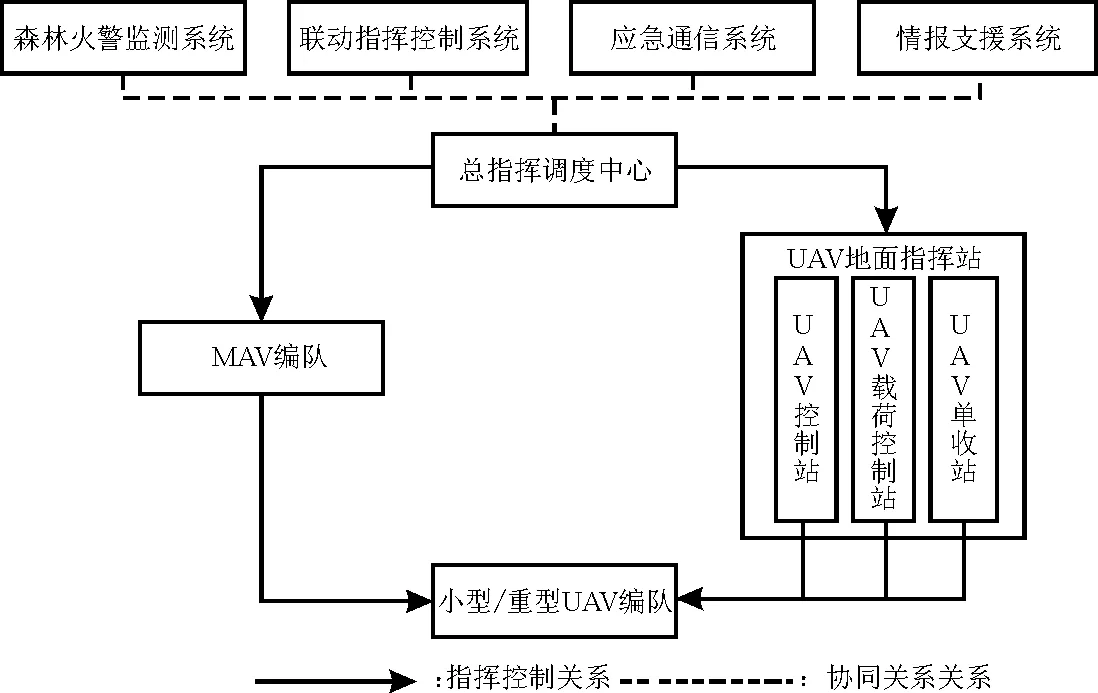
图4 组织关系图
2.3 作战资源流表述模型
MAV/UAV协同森林灭火作战体系各节点之间用需求线连接,图5清晰展示了系统之间资源交换的需求和资源的流向[19]。
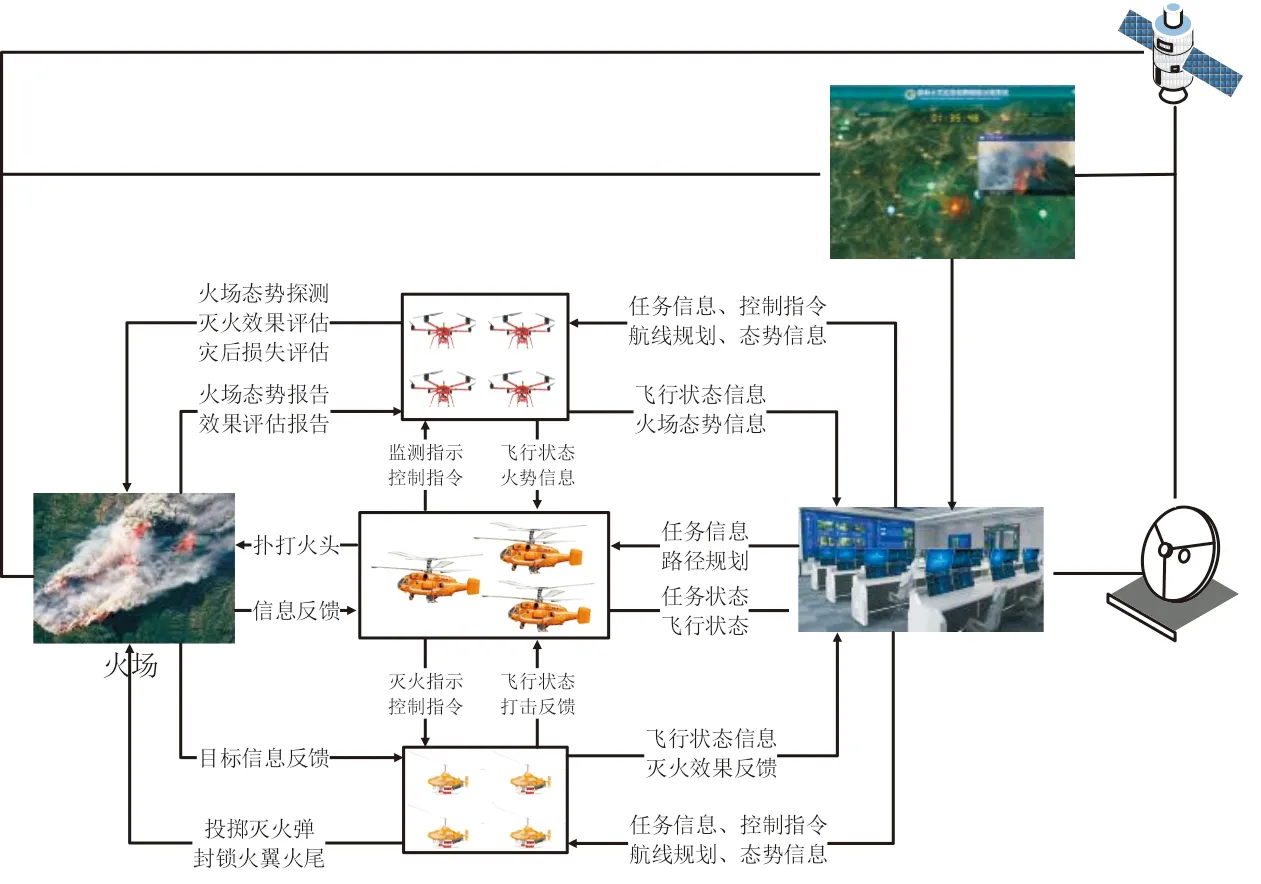
图5 作战资源流表述模型
2.4 作战活动模型
根据MAV/UAV协同森林灭火作战资源结构和能力的需求,本文采用分层思想,基于观察-判断-决策-行动(OODA)环创建了作战活动模型[20],将MAV/UAV协同森林灭火作战活动逐层分解为消防战备状态调整、火场态势感知、林火蔓延威胁评估、灭火作战计划制定、混合编队空中灭火、灭火效果评估等六个作战活动,进一步研究各种活动之间输入、输出信息流的相互关系。活动分解情况如图6所示。
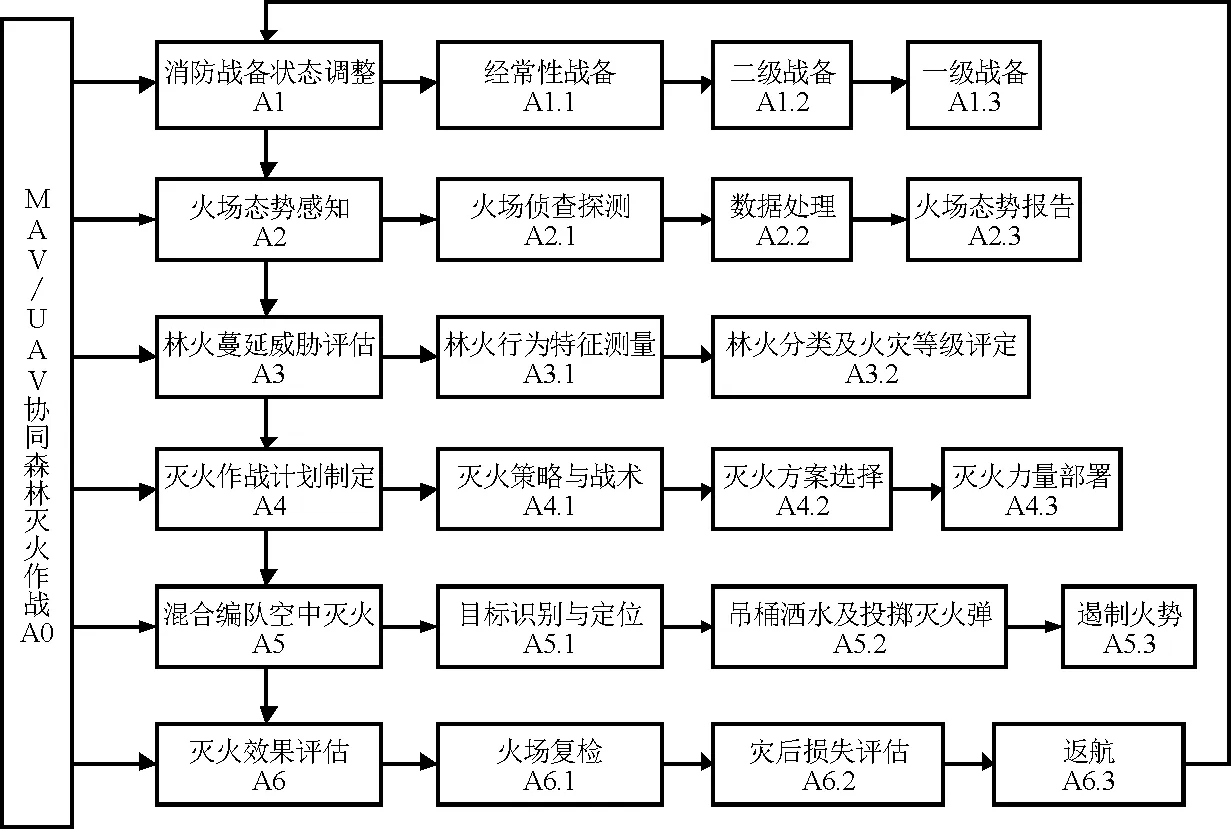
图6 作战活动模型
2.5 作战事件跟踪模型
为了厘清MAV/UAV协同森林灭火作战任务中的各节点做出的动作以及先后顺序,本文建立了作战事件跟踪模型,如图7所示。其中主要作战节点包括:总指挥调度中心、UAV地面控制站、MAV编队、小型UAV编队、重型UAV编队和火场。

图7 作战事件跟踪模型
2.6 作战状态转换模型
面对作战过程中的不同事件,各作战节点会改变自身的状态做出响应。本文以进入消防战备状态后MAV、小型UAV及重型UAV作战状态转换为例,通过绘制作战节点的状态图来建立作战状态转换模型如图8所示。
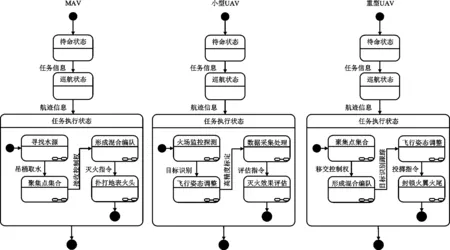
图8 作战状态转换模型
3 体系结构模型验证
为验证本文所构建的体系结构模型是否具有合理的逻辑关系与行为关系,考虑到体系结构模型验证工具IBM Rational Rhapsody可基于统一建模语言(Unified Modeling Language,UML)建立可执行模型并测试仿真。故将设计好的作战状态转换模型(OV-6b)、作战事件跟踪模型(OV-6c)导入Rhapsody平台,通过比较模型验证结果与预期作战流程的一致程度即可判断模型设计是否合理。
本文模型执行验证结果如图9所示,主要反映了在MAV/UAV协同森林灭火作战过程中总指挥控制中心、UAV地面控制站、MAV编队、小型UAV编队和重型UAV编队之间的动态行为和响应顺序。将图9的模型执行验证结果与图7的作战事件跟踪模型(OV-6c)进行进一步比较,可以看出:

图9 模型执行验证结果
(1)在任务规划阶段,图7中总指挥控制中心首先创建任务、规划任务,并向UAV地面控制站及MAV发布灭火作战任务,MAV编队开始巡航;UAV地面控制站向小型、重型UAV编队发送航线规划信息,引导小型、重型UAV编队进入巡航状态。图9中总指挥控制中心执行创建任务,随后向UAV地面控制站及MAV发布灭火作战任务,MAV编队起飞进入巡航状态;UAV地面控制站在接到任务之后向小型、重型UAV编队发送不同的航线规划信息,进入各自任务巡航状态。由此可见,在该阶段二者流程一致。
(2)在火场探测阶段,图7中,MAV编队进入寻找水源状态并完成吊桶取水,前往聚集点待命;小型UAV编队前出火场探测,将火场情况反馈给UAV地面控制站, UAV地面控制站综合林火行为、强度等信息进行态势分析并反馈给MAV编队。图9中,MAV编队进入寻水状态,完成取水后前往聚集点集合待命;小型UAV编队前往火场进行持续探测,不断调整飞行状态以采集高精度火场数据,并将火场情况传递给UAV地面控制站,待其分析后获得下一步指令;重型UAV编队在此阶段巡航至聚集点与MAV编队集合待命。由此可见,在该阶段二者流程一致。
(3)在编队构成阶段,图7中,MAV编队收到火场态势信息反馈后开始启动灭火计划,接收重型UAV编队控制权形成混合编队,接收小型UAV编队控制权令其继续跟踪监视火势。图9中,MAV编队向小型、重型UAV编队发送灭火任务启动指令,重型UAV编队移交控制权与MAV编队形成混合灭火编队并等待下一步任务指令,MAV编队控制小型UAV编队继续保持对火场情况的监视探测。由此可见,在该阶段二者流程一致。
(4)在编队灭火阶段,图7中,MAV编队执行火头扑灭任务,向重型UAV编队发出指令,分配目标区域;重型UAV编队执行火翼、火尾的封锁任务。图9中,MAV编队向重型UAV编队提供目标分配信息并发出任务指令,重型UAV编队负责火翼、火尾的封锁,MAV编队负责火头的扑打,共同减缓火势蔓延。由此可见,在该阶段二者流程一致。
(5)在效果评估阶段,图7中,MAV编队向小型UAV编队发出评估指令,小型UAV编队前出火场进行火场复检与评估,并将评估结果传递给MAV编队。MAV编队将评估结果进一步整理形成任务报文上交给总指挥调度中心,联合灭火作战任务结束。图9中,灭火任务完成后,MAV编队向小型UAV编队发出评估指令,小型UAV编队采集火场情况并对灭火效果进行评估,之后将评估结果传递给MAV编队,经MAV编队确认无异常后形成任务报文传至总指挥调度中心并结束灭火。由此可见,在该阶段二者流程一致。
综上所述,该模型执行验证结果与预期作战流程保持一致,因此MAV/UAV协同森林灭火作战体系结构设计合理。
4 结论
本文基于美国国防部体系结构框架,在分析MAV/UAV协同森林灭火作战流程的基础上,从作战视点角度构建了MAV/UAV协同森林灭火作战体系结构模型。该模型全面描述了MAV/UAV协同森林灭火作战的顶层概念,明确了MAV/UAV协同森林灭火作战系统节点的组成,厘清了作战活动之间输入、输出信息流的相互关系和信息动态的时序逻辑。这对实现人与灭火装备器材的最佳结合,实现高效联合灭火作战具有指导意义,可为森林灭火组织指挥与控制提供技术支撑。最后,基于模型验证工具IBM Rational Rhapsody验证了体系结构模型的逻辑关系和行为关系的正确性。
