一种光伏智能导盲头盔
2022-03-12林星妍王雨乐薛皓闻徐壮华丁春雷
林星妍 王雨乐 薛皓闻 谢 宇 徐壮华 丁春雷
(南通理工学院电气与能源工程学院,江苏 南通 226001)
0 引言
目前,常规导盲手段有2 种(导盲犬、导盲器材)。由于导盲犬培育周期长、价格昂贵且市场需求量大,因此供不应求。导盲杖是大多数盲人正在使用的导盲器材,导盲杖始终无法像导盲犬一样灵活、可靠。智能导盲杖将在一定程度上弥补传统导盲杖的缺陷,但是都普遍存在成本高、稳定性差以及操作不便的缺点。因此,成本低、体积小且探测范围较广的导盲产品必然是当下的主要发展趋势。该设计秉持简单、可靠的原则,结合新技术设计符合盲人生活习惯的智能穿戴类产品,采用图像识别技术来满足体积小、探测范围广的需求。
1 工作原理
1.1 电源模块
负载可由蓄电池和柔性太阳能电池供电,柔性太阳能电池采用Miasole 柔性铜铟镓硒太阳能电池作为使用时的主要电力来源,光电转化效率为17%(最高可达23%)。该太阳能电池轻薄,可以减少使用者的负担,当质量相同时,铟镓硒太阳能电池的发电量是硅板的 4 倍,可以降低蓄电池的使用量。柔性太阳能电池在给蓄电池充电时遵守轮流充电的原则,电源模块示意图如图1 所示。

图1 电源模块示意图
1.2 图像识别模块
该设计采用树莓派2 代B 型开发板为该模块的核心,树莓派2 代B 型开发装有完整的Linux 操作系统作为底层,串口丰富可运行部分复杂程序[1]。通过OpenCV 处理库中提出的有关功能实现实时采集图像数据的目标,以采用HaarTraining 算法训练得出的分类器和Canny 算法的边缘检测作为进行图像识别的主要功能。据调查,盲人群众的出行主要依靠个人出行、陪伴以及交通工具,而红绿灯、盲道是盲人群众最无法提前预知和把握的领域,并且,我国的红绿灯和盲道是较固定的,也便于拍摄和识别。因此,在识别方面主要针对盲道和红绿灯,为盲人的出行提供更可靠的保障。
1.2.1 摄像头
cvCaptureFormCam 相机采集图像,并且摄像头位于人体额头位置,有更广阔的视野,可以更好地分析周围的红绿灯、盲道。通过函数开启定时器:将一个固定的时钟传递给槽函数,然后将它放在缓存上并通过cvGrabFramea 读取数据,最后在qt(跨平台的C++图形用户界面应用程序框架)上显示,并转换为QPixmap 类型。
1.2.2 图像的预处理环节
1.1.5 遵守临床试验的双盲原则 研究者分成4组,第1组筛选和分配受试者;第2组施行治疗;第3组观察和搜集指标数据;第4组统计数据并且撰写文章;试验对象的分组对受试者严格保密;4组研究者的各自操作互相保密。
针对红绿灯这种距离可能较远的实物,主要使用缩放的调节功能(采集的图像的宽度为x和高度为y,生成的新的宽度和高度分别为X和Y),如公式(1)、公式(2)所示。
式中:f为缩放因子。
如果缩放函数Zoom()的值小于1,就代表缩小;如果其值大于1,就代表放大。可以将已缩放的画面直接显示到新创建的缩放画面的窗口上。
1.2.3 鉴别环节
首先,读取训练图片,创建PVA 子空间,将数据分析到子空隙,再训练结论并存储结论,以实现图片鉴别的功能。其次,OpenCV 使用本身自带的HaarTraining 分类器将图像训练分类,再用Canny 算法进行边缘检测,以完成对采集图象进行边缘检查的任务,再把数据分析结论存储在cvRect 中。最后,在鉴定实物时,还必须与数据库里的目标样品进行比较,就可以确定实物图片所属类别,判断是否存在安全隐患。各技术的设计使用细节和流程如下。
Canny 算法边缘检测的流程如下:1)利用cvtColor 对图片进行灰度化处理。2)对图片进行高斯滤波,这样计算图象梯度幅值的元素值越高,显示在该点的梯度值就越大。3)通过Soble 计算梯度值和方向,寻找像素点局部的最大值。4)非极大阈值的抑制。5)双阈值的选取,由于总可能有中间阈值点以上的点是高极阈值边界点的一种延伸,因此使用双阈值进行检测并进行边缘连接。6)进行边缘检测[2]。
利用自带的HaarTraining 程序训练一个分类器,具体分为以下6 个步骤:1)收集训练样本,将样本分为正样本和负样本,再将正样本尺寸归一,该文将标准定为100 pt×80 pt。2)生成正样本描述文件。3)利用createsamples程序将正样本转换为vec文件。4)创建负样本。5)利用OpenCV下的HaarTraining算法程序进行样本训练。6)生成XML 文件(分类器),加载XML 文件并调用相应的函数进行下一步分类和检测。
图像识别模块示意图如图2 所示。
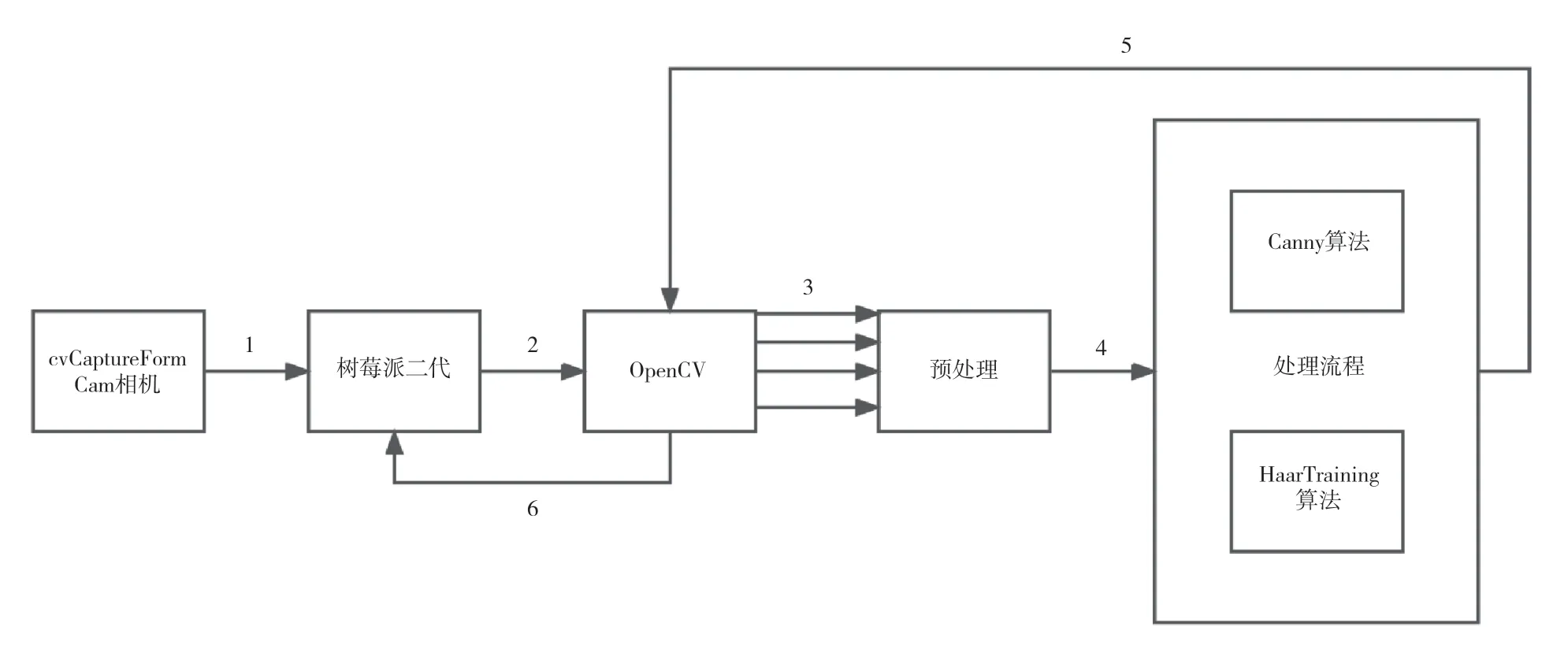
图2 图像识别模块示意图
1.3 导航模块
该文采用中科微电子的AT6558芯片和ATMEGA328 单片机[3]。中科微电子AT6558接收卫星C/A码并通过 ATMEGA328单片机对接收的位置信息进行解码,以提取有效数据,ATMEGA328 单片机的PD0 与PD1 接口分别与ATGM336H-5N31GPS 芯片的TXD 和PXD 连接,再通过PD3 以短信的形式发送至手机,最终将提取出的经纬度显示出来。AT6558 通过ATMEGA328 单片机对接收的位置信息进行解码和提取。
1.4 语音模块
在语音模块中使用2 种类型的芯片,分别为科大讯飞的AIUI 评估板和北京宇音的SYN6288 芯片模块。其中,AIUI 评估板为头盔提供与使用者日常生活进行交互的功能,例如天气询问、导航播报等。而SYN6288 芯片则是通过传感器来确认前方是否存在障碍物,从而播报提前设置好的语音警示词,以提醒使用者。
1.4.1 科大讯飞评估板
该评测板拥有超强的语言交互能力,支持自界定提醒词和各种自然声调的发音,可以自己从开发网站生成自界定提醒词文档,并利用面板上的USB 端口,使用ADB 指令将提醒词文档传送至评测板并重启,以运行自界定提醒词。评估板上庞大的资料云端库以及极高的识别率让头盔具有“能听会讲”的能力。
在云端辨识出语义后,AIUI 评估板的串口就会提供有关对话具体内容的Json 格式数据信息,透过分析Json 格式的数据信息就可以了解使用者的意愿。同时,AIUI 云端开发系统支持自定义的对话功能,由于其具有超强的自定义能力,因此可以在语音播报、日常对话问询等各种情景下进行个性化互动。
1.4.2 SYN6288语音播报芯片
SYN6288 语音播报芯片通过软件将需要的声音转换为16 进制并加入代码中。该模块可以播报中、英文,它与单片机通过串口通信进行连接,串口发送包括声音内容的GB2312 编码,模块播放声音。
SYN6288 所构成的硬件电路主要有数字采集电路、数据处理电路以及声音合成用的电路[4]。信息收集系统主要使用超声波检测和图象识别,超音波检测系统由最先进的KS103 测距模块所构成。KS103 的高温补偿模块的检测精度更高,采用温度校正的测距命令,在近距离内最大准确度为1 mm;探测盲点小至1 cm,最大量程达到8 m,基本无盲点。并通过ⅡC 端口与服务器进行通信,自动应答服务器的Ⅱc 控制指令。图像识别则是通过摄像头来捕捉红绿灯和盲道的图像,它们分别具备不同类型的提醒声音。
ATMEGA328 单片机负责数据处理工作,其将收集到的信息分别传给SYN6288 模块以及评估板控制程序,该芯片采用32 引脚4 列封装(MLF)的形式(单片机和SYN6288模块的接线为PD2~RX)。
语言合成的传送系统,一般由SYN6288 系统和扬声器构成。其中,SYN6288 负责管理从文字到语言的转化(TTS),而扬声器则负责管理发出声音指令。SYN6288 采用异步式串口(UART)的通信方法,可以接受待合成的文字数据,从而完成从文字到话音的切换任务,也可以采用PWM 输出方式(或增加外接输出功率)控制音箱,从而完成输入、输出话音的任务,并能通过直接读取BUSY管脚的电平来得到晶片当前的工作状态。同时,该晶片还支持GB2312 等规格的文字,支持标点符号、汉字和数字处理,能准确标识代表数字、时间和日期的字符,并具有强大的多声字处理能力。
1.4.3 TTS 语言合成基本原理
文本转换语音(Text To Speech,TTS)技能是人机智能交流发展的必然趋势,利用MCU 和PC 机控制语言芯片发音就可以实现在各种场景下的文本信息播报功能。
TTS 的变换程序主要是将语言序列转换为音韵序列,再让计算机通过音韵程序产生语言波形。该处理方法包括语言学处理和韵律处理,而目前进行这种处理比较好的方法是将基于规则的波形拼接技术与参数语言生成技术结合。语音模块示意图如图3 所示。

图3 语音模块示意图
2 测试过程
该文所设计的GPS 集成方案测试通过显示屏让模块运行结果可视化,连接图如图2 所示。太阳能板的供电还需要一个稳压控制器。太阳能电池板是利用光伏效应将太阳能转化为电能的一个集电部件,稳压控制器保护整个电路的稳定。通过稳压控制器给ATMEGA328 单片机供电,按照需求连接完成。最后通过显示屏显示测试数据,如图4、图5 所示。

图4 GPS 连接图

图5 测试数据
ATMEGAP 单片机编程代码如下。
实地测试GPS集成方案与经纬定位App结果误差在预计定位精度内(属于可接受范围内)。
3 创新点
该文所设计的产品具有以下创新点:1)认识障碍物。中国传统的导盲杖利用拐杖与障碍物间的摩擦帮助盲人认识障碍物。该方式不仅识别距离较近,而且只能感应盲人面前的障碍物,不能感应两侧的障碍物。但是该设计在树莓派的基础上利用 OpenCV 图像处理算法库,通过采集、处理以及提取图像可以更有效、更清晰地识别障碍物。2)导航方面。目前,市场上最常见的导盲设备在精准度、价位和稳定性等方面存在缺陷。因为引导盲人行动的工具存在局限性,所以大部分盲人的行动区域都非常狭小,仅限制在自己所熟悉的行动区域内,该文所设计的自带GPS 导航的导盲头盔不仅能满足盲人拓展自己行动区域的需要,而且GPS 定位还可以帮助亲朋好友锁定盲人的位置。3)语音交互。盲人根据自己的需求用声音呼应人工智能,在满足需求的同时,还能保障盲人在外的安全。4)节约能源。与传统导盲仪相比,该设计秉持“绿色环保”的理念,将磁性充电和太阳能板相结合,可以实现充、放电交互并进的功能,从而达到节约资源的目的。
4 结语
该文从盲人生活出行的必要要求的角度出发,利用现有技术满足盲人出行需求。首先,通过理论层次收集足够的信息支撑,并提出概念性的设计。其次,通过阅读相关文献对各模块进行代码编译和运行尝试。最后,在为盲人安全出行提供一种选择同时,也利用智能设备满足了盲人出行的个性化需求。该文设计的头盔还存在缺陷,一方面是行人运动方向的不确定性和随机性及语音系统预警的时间差能否满足盲人做出规避障碍物的动作,另一方面是柔性太阳能电池工作产生的热量能否有效降低盲人佩戴头盔的不适感。