基于SIM900A的智能抗台风窗户保护装置的设计
2022-03-11张乾丰何一民袁文波李清清杨时钰王良
张乾丰,何一民,袁文波,李清清,杨时钰,王良
基于SIM900A的智能抗台风窗户保护装置的设计
张乾丰,何一民*,袁文波,李清清,杨时钰,王良
(湖南文理学院 机械工程学院,湖南 常德 415000)
针对玻璃窗户易被台风卷起物破坏的情况,设计了基于SIM900A的智能抗台风窗户保护装置。装置分为机械执行机构和控制系统两部分,执行机构采用翼展式的设计,其主体部分由同步带传动机构和齿轮-连杆组合机构组成;控制系统除控制装置运动外还具有通过SIM900A模块向用户反馈信息的功能。运用三维软件对装置的机械结构进行了设计,并对主要零部件进行了有限元分析校核,同时完成了控制系统的设计,最后通过加工组装的试验样机开展了模拟试验,验证了装置机械结构和控制系统的可行性。
抗台风;窗户保护;SIM900A;信息反馈
2018年台风“温格比”造成数十万间房屋倒塌、一千多万人受灾,直接经济损失369.1亿元[1]。每年台风造成低矮房屋的损失占总损失的一半以上,而低矮房屋的损毁通常是从表面围护体系的窗户开始的[2]。吴凤波等[3]提出了低矮房屋围护结构风致易损性分析方法,揭示了迎风墙构件在强风中往往面临着较高破坏风险。为了实现透光功能,窗户都是由玻璃构成的,当台风达到一定级数时,玻璃窗经常会因为房屋内外压差而被吹裂,或者被台风卷起的杂物击穿,造成屋内财产的损失。
为了应对台风的侵袭,在国内外,人们采取的措施普遍是贴胶条或是在窗户外面钉木板。这些传统的临时加固的方式结构强度低或是安装拆除工作繁琐。除此之外,国内有相关设计者设计了机械的加固方式。例如,王家发等[4]设计了一种可以折叠的窗户加固机械装置,台风来临前展开装置,通过鞋履固定在窗户相对的两墙面上,以此来支撑着玻璃;谢继文等[5]以铝合金结构和STM32单片机控制为基础设计了一种装置,实现在台风来临时及时自动地保护窗户,避免台风卷起的杂物击碎玻璃。
1 装置的整体方案设计
基于SIM900A的智能抗台风窗户保护装置由机械执行机构和控制系统组成。根据窗户抵抗台风的要求,装置通过三角架安装固定在外侧窗沿的顶端,如图1所示。

1.墙体;2.装置;3.窗户。
装置配有风力传感器和雨量传感器,用来检测外界环境变量。未工作时翼板折叠收于窗沿顶端,可起到雨棚作用并节省空间;台风来临时,当传感器检测到外界环境变量达到设定数值时会向控制器发送动作信号,控制器控制电机开始工作,电机产生的动力依次通过同步带、转轴传递到齿轮-连杆组合机构。组合机构使第一块翼板顺时针旋转90°,同时第二块翼板逆时针旋转90°,当翼板触碰到装置下行的行程开关时,电机停止工作。此时装置的翼板覆盖在窗户上面,实现对窗户保护。翼板工作完成后,控制器会控制SIM900A模块向用户反馈装置已关闭的信息,如此可避免用户不在家或没有及时关闭窗户时窗户玻璃被台风卷起的异物砸碎,实现窗户的智能抗台风保护。当台风过境后,用户可通过手动按键使装置还原。
2 机械执行机构设计
智能抗台风窗户保护装置的机械执行机构采用了翼展式的设计,如图2所示。
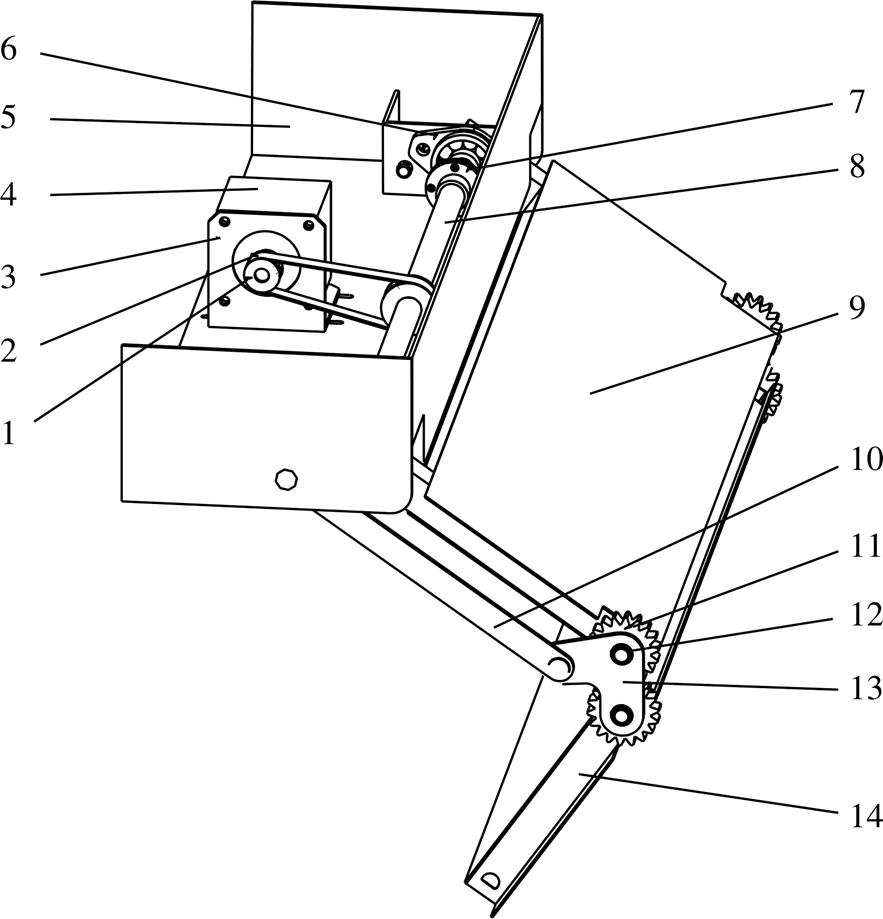
1.同步带轮;2.同步带;3.电机座;4.电机;5.外壳;6.菱形带座轴承;7.法兰联轴器;8.转轴;9.翼板1;10.连杆;11.直齿圆柱齿轮;12.卡簧;13.链板;14.翼板2。
2.1 传动机构设计
同步带传动机构和齿轮-连杆组合机构是本装置的两个主要机构。
2.1.1 同步带传动机构
同步带可以实现远距离传动,同时具有传动平稳、噪声低、无需润滑的优点,且具有缓冲、减振的作用[6]。
2.1.2 齿轮-连杆组合机构
为同时满足在工作时可以覆盖窗户表面形成坚固的表面围护体系、在非工作状态时能收缩折叠不影响室内采光的要求,本装置采用了齿轮-连杆组合机构。其中的连杆机构采用的是平行四杆机构,如图3所示。齿轮-连杆组合机构的自由度为:

式中:为构件,=4;P为低副,P=5;P为高副,P=1。
计算得:=1
原动件是通过转轴驱动的翼板1,即齿轮-连杆组合机构具有确定的运动规律。有研究表明,当四杆机构的传动角min为40°~50°时,机构传力性能好[7]。为避免装置在运行过程中平行四杆机构出现位置不确定问题[8],将四杆机构工作时的动作起始位置和动作终止位置设计为如图4所示,其中将机架与连架杆在动作起始位置时的夹角的补角设计为12°。
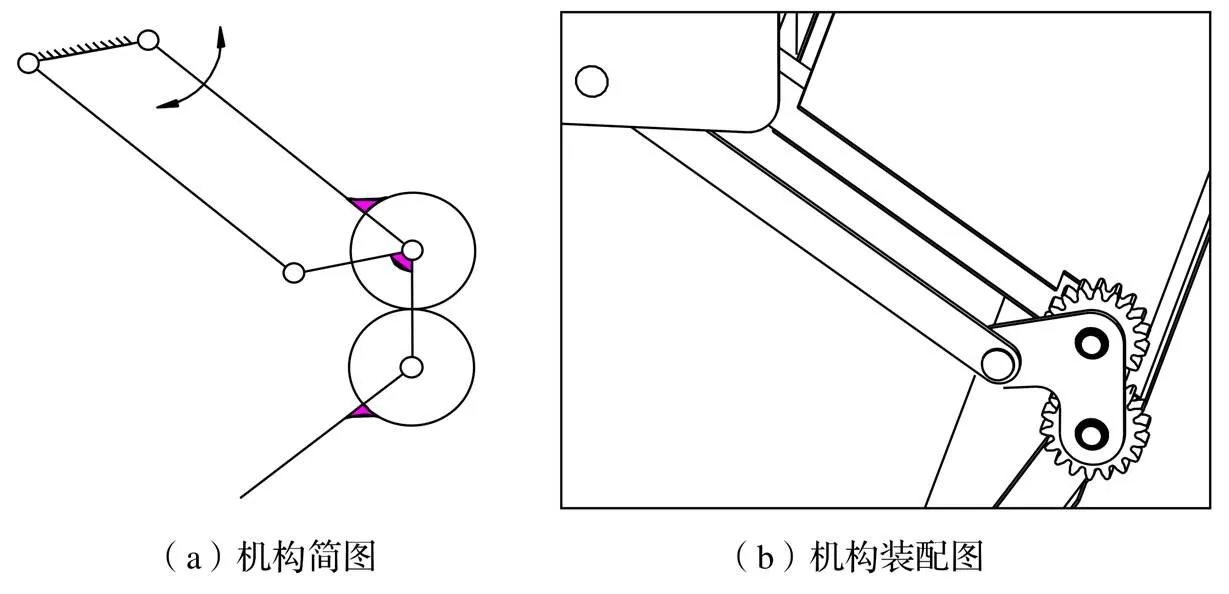
图3 齿轮-连杆组合机构
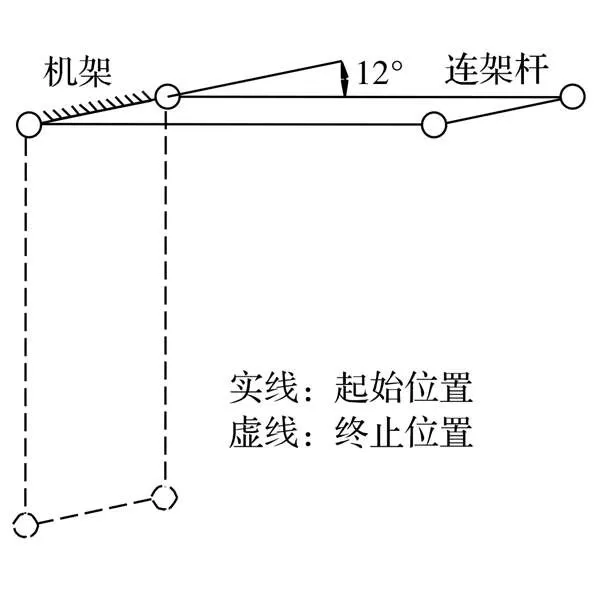
图4 四杆机构的起始终止位置
2.2 零件设计
2.2.1 翼板
翼板在装置中是保护窗户不受台风破坏的重要部件,按照装置要抵御12级风力的要求,需对翼板进行有限元分析,以此来验证翼板的强度。为减轻装置的整体质量,翼板的组成零件均使用铝合金。
根据伯努利公式,有:


对翼板进行有限元分析。由于翼板是组合件,在对其进行前处理时需对翼板的各个构件间添加面对面接触的设置,使其成为一个刚性整体。翼板的固定约束位置与载荷施加位置如图5所示,仿真后的应力云图结果如图6所示。
图5 翼板施加约束与载荷后的效果图

图6 应力云图
从应力云图结果可知,在0.36 kN/m2的风压下,翼板所受到的最大应力为11.705 MPa,这个结果小于抗拉强度[σ]=150 MPa[9],满足设计要求。
2.2.2 转轴
为分析翼板对转轴的作用力,对处于相互折叠状态的两块翼板进行整体受力分析,并求解两块翼板对转轴的总力矩,如图7(a)所示。点为翼板与转轴的连接处,翼板1与翼板2的质量1=3=0.65 kg,其质心距转轴的水平距离=92.5 mm,即为翼板宽度的一半;翼板1的一端与翼板2的一端上各有两个齿轮(图中虚线表示),其质量2=4=0.25 kg,其质心距转轴的水平距离=185 mm,即翼板的宽度。
各重力为:
1=3=1×(4)
2=4=2×(5)
取9.8 m/s2,计算得:1=3=6.37 N;2=4=2.45 N。
对翼板1单独进行受力分析,如图7(b)所示。忽略的间距,翼板2与处齿轮对翼板1的点产生了力矩1和力4,大小方向与4相等。

图7 机构整体受力图
即有:
1=3×(-) (6)
=1×+(2+4)×+1(7)
计算得:1=0.589 N·m;=2.085 N·m。
此时对理想状态下的转轴进行受力分析,如图8所示,转轴被、处的轴承支撑着,转轴受到来自翼板的力1、2和扭矩,扭矩即是电机驱动装置所需的最小扭矩。
其中:
=(8)

计算得:1=2=8.82 N。

计算得:=1.4465 N·m。
按照弯扭合成强度校核[10]为:


式中:σ为轴的计算应力,MPa;为轴的抗弯截面系数,mm3;0为轴的直径,mm。
计算得:σ=9.419 MPa≤[-1],强度合格,相关变量值如表1所示[10]。
表1 转轴的相关参数
另外,由于转轴上需开键槽,键槽对轴的强度将产生影响,所以需对零件结构的受力变形进行仿真分析,结果如图9所示,可知,带键槽的转轴的最大应力为11.327 MPa≤[-1],强度合格。

图9 带键槽的转轴应力云图
2.2.3 链板
链板是连接翼板1和翼板2的重要零件,机构在起始位置时链板的受力如图10所示。

θ=12°;G1'为翼板2和翼板2上齿轮的总重,G1'=8.82 N;F3为链板受到连杆的力,F3=8.26 N。
为了减轻链板的质量,将IC边设计成弧形,并对链板的受力变形进行有限元分析。链板采用的材料是铝合金,许用应力为370 MPa,其应力云图如图11所示。从云图仿真结果来看,链板的最大应力不足1 MPa,其受力情况在许用范围内,满足使用要求。

图11 链板应力云图
2.2.4 齿轮
按照齿轮-连杆组合机构的设计,需对齿轮传动机构部分进行强度校核。
因齿轮传递的扭矩不大且其结构也不大,故齿轮材料选择45号钢,为增强齿轮的力学性能,采用调质处理,使齿轮表面硬度超过217 HBW。齿轮精度为6级,屈服极限σ=360 MPa。
另外,因翼板1和翼板2没有要求变速转动,所以齿轮的传动比选为1:1。为尽可能地减小翼板之间的间隙,根据翼板的厚度设定齿轮的中心距a=36 mm,齿轮模数选为=2,则有齿轮的分度圆直径1=2=a=36 mm。齿轮的参数如表2所示。

表2 齿轮参数
齿轮传动的失效形式有轮齿折断、齿面点蚀等多种,在现有的计算理论下可对齿轮进行齿根弯曲疲劳强度计算和齿面接触疲劳强度计算。由于装置的工作时间短,可不考虑齿面点蚀的情况,所以只对齿轮进行齿根弯曲疲劳强度计算。
通过查阅机械设计手册[10]得直尺圆柱齿轮的弯曲疲劳强度条件为:







齿轮的许用应力为:

所以该齿轮的齿根弯曲疲劳强度符合要求。
对齿轮进行有限元分析,在去除齿轮中如倒圆角等对齿轮有限元分析影响较小的结构后,对右边齿轮的轮毂部分添加点-面的1D连接并对节点施加固定约束限制齿轮的全部六个自由度,对左边齿轮的轮毂部分施加“销住约束”释放旋转自由度。对两个齿轮的啮合处施加面对面接触并设置静摩擦系数为0.3,如图12所示。最终得出的齿轮有限元分析结果如图13所示,可知,用计算机仿真的齿轮最大应力为78.9 MPa,小于齿轮的屈服极限,强度合格。
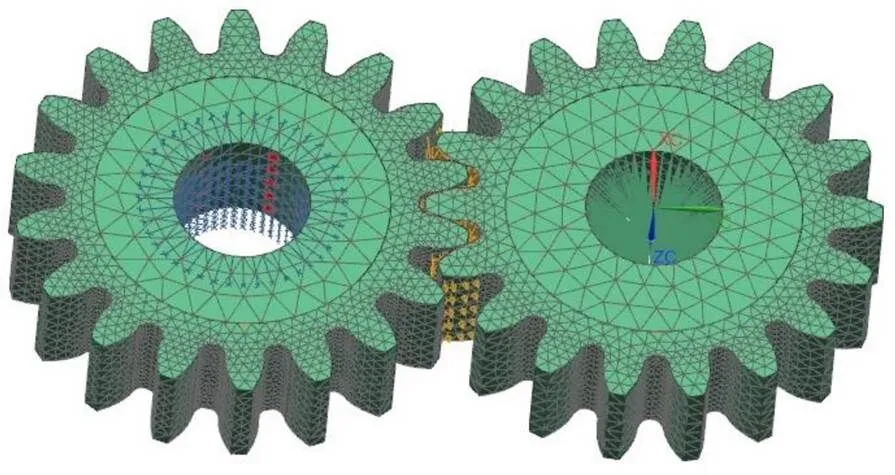
图12 齿轮施加约束与载荷等后的效果图
采用以材料力学为基础的传统理论公式计算的齿根弯曲疲劳强度和采用计算机辅助分析的以弹性力学为基础的有限元法[11],这两种方法得出的疲劳强度结果不同,且差距较大。分析认为理论计算存在一定的局限性,载荷的施加部位、接触方式的设置会对仿真分析结果造成一定的误差。相较于理论计算,有限元仿真更加满足实际的工况[12]。

图13 齿轮应力云图
2.2.5 同步带与同步带轮
通过查阅机械设计手册[10]等相关书籍,设定小同步带轮的转速2=5 r/min,选用5M圆弧齿同步带轮,同步带传动的传动比12=1.7,=2.085 N·m。
则有:

P=K×(21)
式中:为传递的功率,kW;P为设计功率,kW;K为载荷修正系数,取值为1.0。
计算得:P==1.09 kW
由于外壳空间限制,同步带传动输出端的同步带轮的半径不能超过23 mm,取大同步带轮齿数2=25,则小同步带轮齿数1=2/12≈15,节距P=5 mm。
大同步带轮的节径为:

计算得:2=40 mm
其半径小于23 mm,符合要求。
另,小同步带轮节径1=23.9 mm。
初设中心距为78 mm,同步带的理论节线的长度为:
计算得:=256.33 mm。
查阅机械设计手册[10]得:=255 mm
则同步带齿数z=/P=51。
综上,同步带的型号选择带宽为15 mm的HTD255-5M。
3 控制系统设计
基于SIM900A的智能抗台风窗户保护装置控制系统的组成、控制流程如图14、图15所示。

图14 控制系统的组成
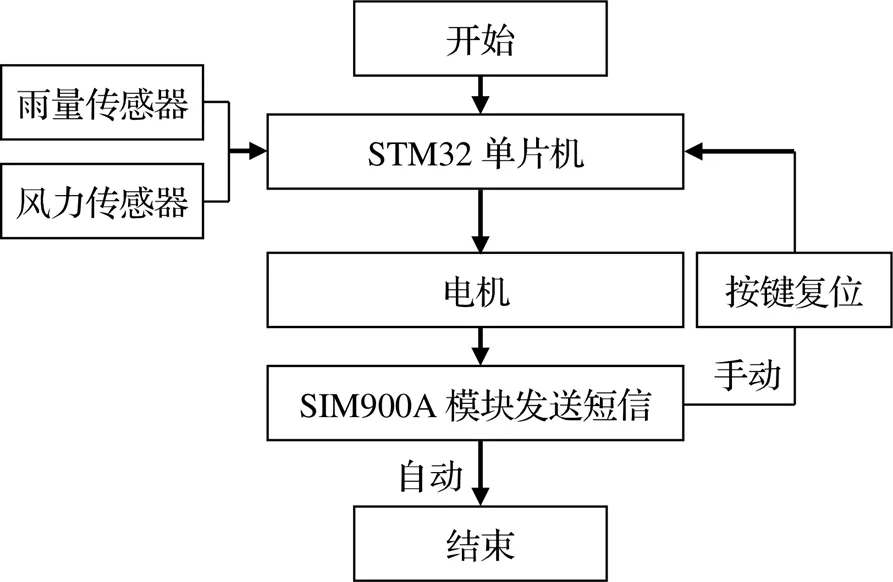
图15 控制系统的控制流程
当台风来临时,风力传感器和雨量传感器产生动作信号传递给STM32单片机。处理接收到的信号后,单片机控制减速步进电机,使得智能抗台风窗户保护装置关闭。当装置关闭后,STM32单片机通过SIM900A模块向用户反馈信息,装置的自动控制流程结束。当台风离境后或是在日常生活中,用户可以通过手动按键的方式使装置折叠收缩或是展开工作。
3.1 微处理器
控制器内的微处理器采用STM32F03单片机。单片机具有灵活、成本低、易于产品化、抗干扰能力强的特点,可构成各种智能式控制设备[13]。STM32采用Cortex-M3内核,其主频高达72 W,具有功耗低、运算速度快、外设丰富等优点。用户可通过配置库函数的方式来配置寄存器,进而配置芯片,驱动STM32的串口。
3.2 SIM卡通信模块
SIM卡是含有微处理器的智能卡,由8位CPU、RAM、ROM、EEPROM及串行通信单元五个部分组成,它采用新式单片机及存储器管理结构,处理功能大大增强。其智能特性的逻辑结构是树型结构,全部特性参数信息都是用数据字段方式表达。
SIM900A模块是与SIM卡通信的桥梁,SIM900A模块上电后,会先检测SIM卡的有效性,模块正常工作后会将各种监控信息发送出去,用户也可利用手机发送信息,通过SIM900A模块传递到控制器,控制器读取指令输出的信息后实现对装置的控制。
3.3 传感器
智能抗台风窗户保护装置上配有风力传感器和雨量传感器来检测外界环境变量,两个传感器相互配合。当传感器测得的环境变量达到设定值时,装置自动开始运行,翼板翻转90°至与窗户平行的位置;翼板运动的起点和终点位置都装有行程开关,当装置运行到两个极限位置时行程开关会使装置停止运行。通过两种传感器和行程开关,实现装置的自动控制。
4 试验
基于SIM900A的智能抗台风窗户保护装置的实物模型如图16所示。试验是以台风天气时风中的杂物可能撞击窗玻璃的情况为背景,通过用鼓风机吹动风力传感器并向雨量传感器滴水的方式营造台风天气的情况,使风力传感器和雨量传感器产生动作信号启动装置。装置启动后,两块相互折叠的翼板,如图16(a)所示,在电机的驱动下通过齿轮-连杆组合机构旋转90°后,基本完全展开覆于窗户上,如图16(b)所示,整个过程用时约2 s。装置停止工作后约30 s内,手机收到SIM900A模块发来的预定信息“The window is closed”。至此,装置所有自动控制的动作均已完成。当“台风”过境后,装置可以通过手动按钮控制重新收缩折叠。装置的机械结构和控制系统均达到了设计目标。

图16 装置实物模型
5 结语
为了实现在台风来临时及时保护窗户的目的,避免台风卷起杂物击碎玻璃造成人身伤害和财产损失,本文开展了基于SIM900A的智能抗台风窗户保护装置的机械结构设计和其相关的控制系统设计,并设计、制作、调试了智能抗台风窗户保护装置的样机,开展模拟试验以验证相关系统的可行性。基于SIM900A的智能抗台风窗户保护装置具有以下特点:
(1)采用翼展式的设计,可折叠,占用空间少,结构简单;
(2)装置在不使用时可充当雨棚,提高利用率;
(3)装置可根据外部环境实现自动控制,基于SIM900A模块的反馈系统在装置启动完成后能给用户发送信息反馈装置的状态。
[1]宋连春. 中国气象灾害年鉴(2019)[M]. 北京:气象出版社,2019.
[2]杨绚,张立生,杨琨,等. 台风大风低矮房屋易损性及智能网格预报的应用[J]. 气象,2020,46(3):429-440.
[3]吴凤波,冀骁文,黄国庆,等. 基于简化渐进破坏的低矮房屋围护结构风致易损性分析[J]. 建筑结构学报,2021,42(5):32-39.
[4]王家发,曾仕英,石顶峰,等. 一种可折叠的窗户加固机械装置[P]. 安徽:CN212479022U,2021-02-05.
[5]谢继文,李国林,高冯贤,等. 抗台风窗户保护机械装置[J]. 河南科技,2020(2):65-67.
[6]郑红. 同步带传动特点与同步轮设计制造的控制[J]. 内燃机与配件,2018(9):121-123.
[7]吕凯英,廖宇兰,益爱丽,等. 木薯收获机挖掘铲挖深控制系统设计[J]. 农机化研究,2018,40(2):100-105.
[8]潘存云. 机械原理[M]. 长沙:中南大学出版社,2012.
[9]沈春根. UG NX 11. 0有限元分析基础实战[M]. 北京:机械工业出版社,2018.
[10]闻邦椿. 机械设计手册[M]. 北京:机械工业出版社,2010.
[11]李阳,张庆. 弧齿锥齿轮行星减速器关键零件校核及有限元分析[J]. 机械制造与自动化,2020,49(5):80-83.
[12]陈保家,代绍雄,殷长帅,等. 大模数齿轮齿条起升机构模拟试验台动力学研究[J]. 现代制造工程,2021(5):6-13.
[13]李建莉. 温度控制直流电动机转速系统的设计与仿真[J]. 科技与创新,2016(14):87,90.
Design of Intelligent Anti-Typhoon Window Protection Device Based on SIM900A
ZHANG Qianfeng,HE Yimin,YUAN Wenbo,LI Qingqing,YANG Shiyu,WANG Liang
( College of Mechanical Engineering, Hunan University of Arts and Science, Changde 415000, China )
Aiming at the situation that the glass window is easily damaged by typhoon, an intelligent anti-typhoon window protection device based on SIM900A is developed. The device is divided into two parts: mechanical actuator and control system. The actuator adopts wingspan design whose main part is composed of synchronous belt drive mechanism and gear-linkage combination mechanism. In addition to control device movement, the control system has the function of feedback information to the users through the SIM900A module. This paper designed the mechanical structure of the device using three-dimensional software, checked the main components, completed the design of the control system, and finally conducted simulation tests through the processing and assembled test prototype to verify the feasibility of the mechanical structure and control system.
anti-typhoon;window protection;SIM900A;feedback
TU382
A
10.3969/j.issn.1006-0316.2022.02.011
1006-0316 (2022) 02-0073-08
2021-05-06
湖南文理学院2019年大学生创新创业研究项目(ZD19001);湖南省大学生创新创业训练项目(s202010549012)
张乾丰(1999-),男,湖南湘潭人,主要研究方向为机械设计制造及其自动化,E-mail:1602419171@qq.com。*通讯作者:何一民(1999-),男,重庆人,主要研究方向为机械电子工程,E-mail:3348255633@qq.com。