桁架式虹吸吸泥机走偏问题分析及解决措施
2022-03-10吕季轩
吕季轩
(西安市自来水有限公司,陕西西安 710038)
0 引言
自来水厂平流沉淀池常采用桁架式虹吸吸泥机作为排泥设备,这种吸泥机具有操作方便、排泥比较可靠、便于实现自动化等优点,近几年来广泛用于平流沉淀池的排泥。但在生产实践中存在一些问题,其中,由于桁架跨距较大,行走长度长,在导轨面上会出现车轮走偏问题,车轮的走偏会导致啃轨及脱轨等严重后果,因此有必要对虹吸式吸泥机车轮走偏问题进行探讨。
1 桁架式虹吸吸泥机走偏概况
本文以双边驱动式吸泥机为研究对象,双边驱动式吸泥机驱动轮分别由独立的驱动装置驱动,包括电机和减速机等,两侧驱动装置均以相同的机件组成,并且要求同步运行。虹吸式吸泥机车轮踏面采用圆柱形双轮缘铸钢车轮,由4 点支撑行走大梁横跨在平流式沉淀池上,池两边均铺设钢轨,从沉淀池的一端运行到另一端,边行走边吸泥,出现吸泥机走偏或者啃轨现象的主要原因有以下5 点:
(1)电机及减速机故障,导致两侧车轮转速不同步。
(2)吸泥机池下结构件与池底、池壁或集水槽等构筑物发生碰撞摩擦。
(3)水下有杂物或两侧配水不均。
(4)行走轮安装误差及磨损严重。(5)轨道安装误差超标或者池体变形导致轨道变形超标。
分析上述5 点原因,引起车轮走偏的原因可以概括为两类,一类是由于电机或者减速器不同步,或者外力分布不均匀,引起两侧车轮行走速度不同而导致车轮的走偏,这种情况可以看作是运动误差引起的车轮走偏,前三点归为此类;另一类是由于行走车轮安装误差、导轨变形、导轨的制造装配误差等原因引起的车轮走偏,这种情况可以看作是几何误差引起的车轮走偏,后两点可以归为此类。对于吸泥机的运动误差,往往先测量电机和减速机转速,再停机后人为调整车轮的行走偏差[1]。对于吸泥机的几何误差,往往是测量跨度偏差、轨距偏差、对角线偏差和车辆轮径后,人为对轨道或吸泥机偏斜角度进行调整[2],这些方法均耗时费力。本文针对电机转速不同步产生的运动误差及车轮、轨道装配误差引起的几何误差,提出了改进的校正方法。
2 运动误差分析及校正
运动误差是指按照某一事先设定的运动学关系进行相对运动部件间的相对运动误差。在吸泥机运行过程中,电机及传动机构等不同步最终导致吸泥机运动不到位产生运动误差。对于两侧电机及传动机构转速差引起的偏转,可以在车轮行走方向前方内测,布置高精度压力传感器,由于传感器位置比轮沿靠内,如图1 所示,当车轮有偏移趋势后,压力传感器首先接触轨道,采集到压力信号后,通过PLC 进行变频调速,抵消两侧速度差,实现车轮走偏的校正。当左侧压力传感器检测到压力信号后,左侧驱动电机停止运行,右侧行走轮继续前进;当左侧压力传感器无压力信号时,停止右侧的驱动电机。为了保证纠偏的可靠性,变频器应具有稳定、可靠、功能性强、响应时间快、同步精度高等特点,因此应选用高精度变频器。
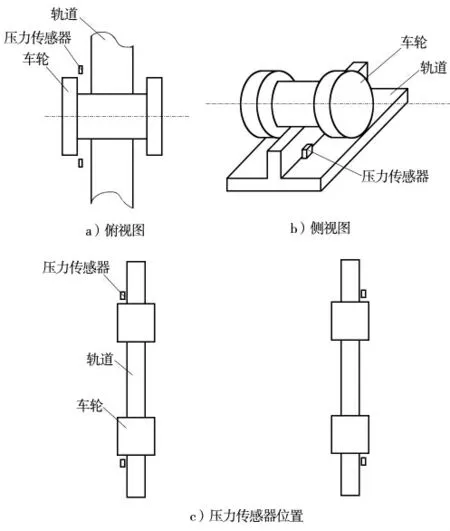
图1 压力传感器布置示意
3 几何误差分析及校正
几何误差是吸泥机轮轨本身的制造和装配不完善产生的误差,包括直线轴和旋转轴的误差,将吸泥机看作一刚体,刚体在空间直线运动中,存在6 个自由度,通过坐标变换原理可得到其误差数学模型。
假设导轨方向为X 轴向,在水平面内,与X 轴向垂直的即Y 轴向,竖直面内与X、Y 轴向均垂直的为Z 轴向。吸泥机沿轨道行走,即沿X 轴行走,其在X 轴的偏移,用符号δx(x)。由于导轨系统制造、安装的不完善,车轮在X 向运动时,其实际运动轨迹可能偏离直线,它包括在Y 方向的偏移δy(x)和Z 方向的偏移δz(x),下角标表示误差运动的方向。同样,由于导轨的不完善,会使车轮在沿导轨的直线运动过程中,产生绕三根轴回转的转角误差δx(x),δy(x),δz(x)。ε 表示转角误差,下标x、y、z 分别表示转轴的方向,括号内的x 表示车轮沿X 方向运动。如图2 所示。
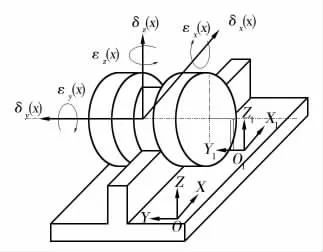
图2 车轮的几何误差
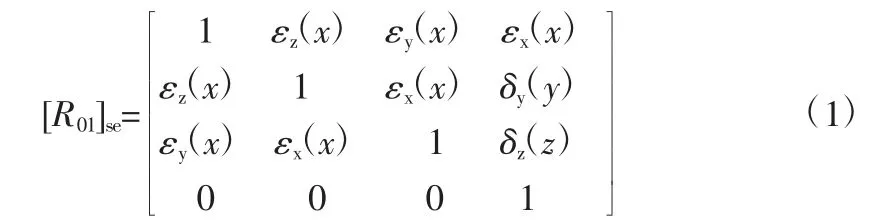
在轨道基座上建立原始坐标系O-XYZ,在吸泥机车轮上建立O1-X1Y1Z1,吸泥机启动前,设两个坐标系是重合的,吸泥机朝X 轴向运动。吸泥机位移误差特征变换矩阵为:
吸泥机沿X 轴运动距离X1后,应到达点(X1,1,1),但由于几何误差的存在,其运动的终点是(x1′、y1′、z1′),其位移变换矩阵为:
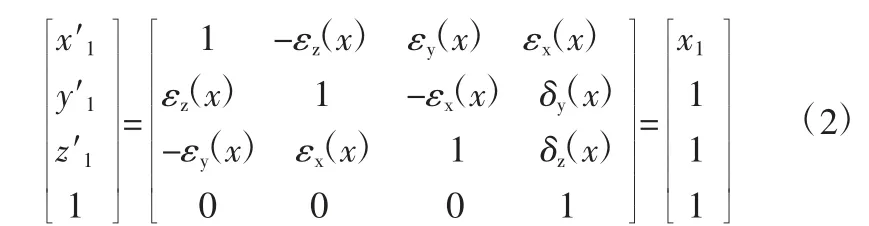
将式(2)展开,可得:

式(3)~式(5)表示在几何误差作用下车轮的实际坐标。由于车轮走偏主要是Y 向偏移,最终吸泥机行走过程中的几何误差可表述为线性方程:

通过式(6)可以计算出车轮在Y 方向的偏移量。
运用传感器采集到车轮行走数据,通过误差项公式,借助PLC 控制模块插补计算和校正执行机构进行误差补偿,实现吸泥机走偏校正,检测周期设定为每经过2 min 自动检测一次,通过补偿,保证车轮沿轨道行走的轴向偏角保持在很小的范围内,实现对吸泥机走偏的校正,从而减少事故发生的概率。
4 结语
通过分析可知,吸泥机走偏和啃轨的原因是由运动误差或者几何误差造成,为了避免啃轨产生严重的后果,分析产生运动误差和几何误差的原因,建立了相应的几何误差数学模型,通过PLC、高精度变频器调整电机转速和插补计算后进行误差补偿的方法对吸泥机进行纠偏,相对于人为纠偏,该方法大大提高了吸泥机纠偏效率。
