长大隧道光环境下驾驶人信息感知表征方法研究现状和进展
2022-03-10何世永周渊涛杜国平
何世永,周渊涛,梁 波,杜国平
(1.重庆交通大学 省部共建山区桥梁及隧道工程国家重点实验室, 重庆 400074;2.重庆交通大学土木工程学院,重庆 400074;3.重庆高新区开发投资集团有限公司,重庆 401329)
0 引言
截至2018年,我国已成为世界上隧道规模最大、数量最多、发展速度最快的国家[1]。钱七虎院士在2020年中国隧道与地下工程大会上指出:“地下空间的开发、利用是人类社会和经济实现可持续发展、建设资源节约型和环境友好型社会的重要途径”。当前,我国隧道发展主要体现在以下3个方面:1)在我国中西部山岭地区,目前大量新建和规划建设的山区高速公路桥隧比在70%~80%以上,常常以连续隧道群,超长、特长隧道的形式出现;2)伴随着城市化进程的不断推进,我国大城市和高密度城市群的发展亟需建造大量地下快速通道;3)我国水域面积辽阔,内陆水域面积达17.47×104km2(长江、黄河、珠江等七大水系),辽东湾、渤海湾等海湾水域面积超过0.5×104km2,大量水下隧道亟需修建[2]。大规模、多类型的隧道由“建造”转“运营”,势必进一步凸显隧道运营安全、舒适和高能耗之间的矛盾。
隧道因具有特殊的半封闭管状结构特点,自然光无法直接照射入洞内,目前国内外规范[3-5]主要采用亮度分段过渡的照明方式保障其运营交通安全。此背景下,隧道洞外自然光环境、洞内人工电气照明环境等共同构成公路隧道运营光环境。当驾驶人驾车经过隧道光环境时,剧烈的明暗亮度过渡易导致视觉适应不及时,亮度均匀性较差又会引起感知度下降[4],线路隧道比、隧道长度等的增加又会加大上述问题对驾驶人的影响,进而导致驾驶人视觉功效降低、视觉负荷增加以及视错觉现象,引起驾驶疲劳或视认错误,进而诱发重、特大交通事故,严重影响隧道运营安全、节能和舒适。
赤瑞特拉的信息获取试验表明,视觉感知占人类信息感知的83%[6];交通事故致因大样本调查显示,视觉作为人因(human factors)主导因素占事故致因比例高达92.6%[7]。因此,实现隧道运营安全、舒适、节能的关键在于为驾驶人提供有效、充分的视觉交通信息,而评价隧道光环境信息是否合理的关键在于光环境信息能否促进驾驶人驾车顺利通过公路隧道。由此可见,隧道动态光环境下驾驶人视觉信息感知表征是隧道光环境设置要考虑的核心科学问题,也是人-车-隧道光环境一体化设计的关键问题之一。目前,国内外学者围绕“隧道动态光环境信息感知表征方法”已开展了大量研究,在指导隧道光环境设计施工中起到重要的作用。但随着我国隧道数量、类型等的增多,高隧道比、长时间的隧道光环境条件势必引发更多驾驶人信息感知问题。
基于此,本文拟在《公路隧道光环境信息感知及试验研究》[6]的基础上,基于公路隧道光环境视觉感知信息组成,系统梳理国内外驾驶人信息感知表征方法研究进展,并结合我国隧道及地下空间建设和发展趋势,进一步提出隧道光环境信息感知表征方法研究建议。
1 交通隧道光环境下驾驶人信息感知表征方法研究现状
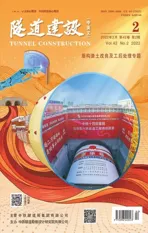
交通隧道光环境下驾驶人信息感知表征方法指:当驾驶人以一定车速驾车经过隧道,处于隧道光环境下时,一种用于表征驾驶人通过视觉获得隧道光环境提供的交通环境信息质量的方法。当前对驾驶人视觉在交通隧道光环境下信息表征的研究大致是从驾驶人视觉辨识能力、视觉功效、视觉负荷和视错觉4个方面展开。其中,视觉辨识能力以驾驶人主观视亮度和目标察觉阈值为基础参数,用以表征驾驶人的信息感知;视觉功效着重于分析驾驶人对障碍物的躲避能力,以小目标反应时间和目标丢失率作为表征驾驶人信息感知的基础参数(视觉功效法中的小目标由20世纪的英国学者Weston引入到交通照明领域,他提出通过测试不同照度下试验人员对不同尺寸和对比度下的视觉目标的反应速度和精度,由此被测试的视觉目标被称为小目标);视觉负荷则着重于驾驶人的心理、生理参数,用以反映驾驶人在行车过程中出现的视觉疲劳和心理紧张等状态;视错觉的研究对象为驾驶人在隧道光环境下出现的速度错觉、线性错觉、距离错觉等感知错觉。从视觉响应类别、定义、表征方式和评价指标4个方面来看,驾驶人视觉信息感知表征方法研究框架如图1所示。
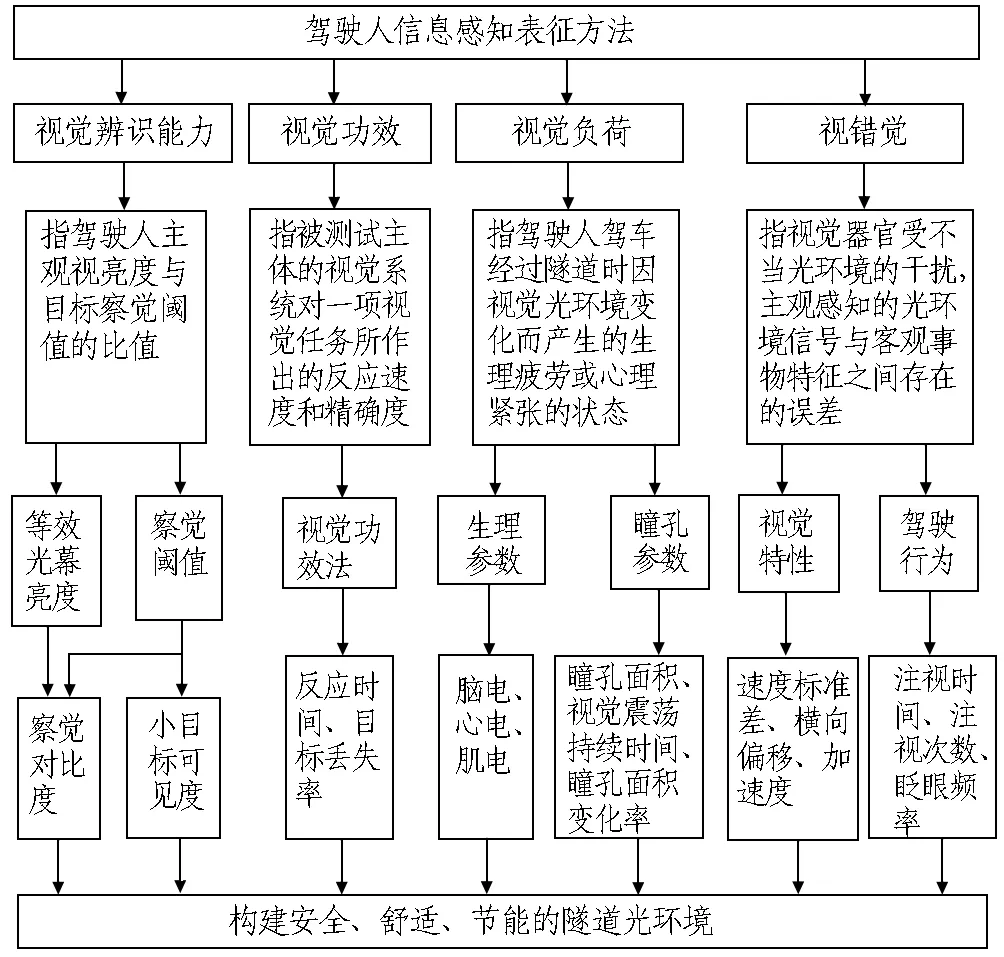
图1 驾驶人视觉信息感知表征方法研究框架图
视觉辨识能力对应人眼在不同光环境条件下的主观视亮度与目标察觉阈值的比值;视觉功效对应驾驶人的小目标反应时间与小目标丢失率;视觉负荷对应驾驶人的心电、脑电、瞳孔参数等指标;视错觉对应驾驶人在驾驶过程中的速度标准差、加速度等驾驶行为指标以及注视持续时间、注视次数等视觉特性指标。从以上评价指标的角度看,当前的驾驶人信息感知表征方法是从人因工程的角度,利用驾驶人的各类心理、生理参数对交通隧道光环境信息质量进行评价。而在具体研究中,则是对隧道光环境进行解构,采用控制变量的方法,分项研究亮度、颜色(相对色温、光谱分布函数)、轮廓形状、空间大小等对驾驶人心理、生理指标的影响[6]。因此,当前学界对于交通隧道下驾驶人信息感知的研究,可以理解为对隧道光环境物理量(环境亮度、颜色、轮廓形状等)与隧道光环境下驾驶人生物量(驾驶人视觉功效、察觉阈值、心理参数、生理参数等)两者之间相关关系的研究。
1.1 隧道光环境下驾驶人视觉辨识能力研究现状
20世纪50年代开始,由于荷兰学者Schreuder[8]和日本学者Narisada等[9]在驾驶人适应点与洞口距离值,即驾驶人究竟在隧道洞口什么位置开始注视或适应洞内环境的“适应距离”或“注视距离”值的选取上存在分歧[10],导致所推荐的入口段亮度值存在较大差异。
为解决驾驶人接近—进入隧道过程中“适应距离”和“注视距离”值选取的国际性难题,20世纪80年代,加拿大学者Adrian[11-13]提出了公路隧道洞口1倍停车视距处等效光幕亮度的计算方法,即驾驶员的视亮度由视野2°范围的中央窝亮度和视野2°范围以外的等效杂散光亮度共同构成,驾驶员视野范围内多个眩光源叠加产生的亮度总和构成等效光幕亮度。2004年,国际照明协会[4]从车内驾驶人视野情况出发,综合考虑空气中光的散射以及汽车挡风玻璃的影响,推荐察觉对比度法描述隧道洞口段视野亮度动态感知特征。隧道入口段察觉对比度计算示意见图2,其计算公式如下:
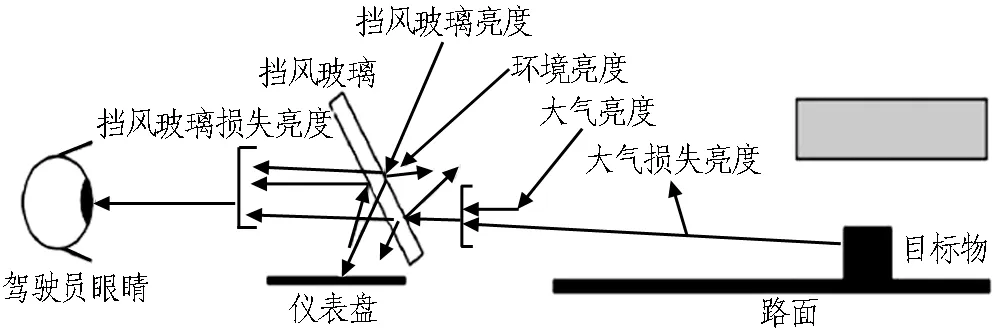
图2 隧道入口段察觉对比度计算示意图
式中:Lth为入口段亮度设计值;τws为汽车挡风玻璃的光透射率;La为大气亮度值;Lws为大气的光幕亮度;Lseq为隧道洞外的等效光幕亮度;τa为大气的光透射率;Cm为路面上被测试目标物的最小察觉亮度对比度;ρ为漫反射目标物的光反射比;qc为测点处路面亮度与目标物中心点垂直面照度的比值,qc=L/Ev(L为中心点亮度,Ev为垂直面照度)。
分析察觉对比度计算公式可以发现,其对视觉目标物如何被察觉的理解,借鉴了德国生理学家E.H.韦伯提出的韦伯定律[14],即感觉的差别阈限随原刺激量的变化而变化,且表现为一定的规律性,即刺激的增量ΔI和原刺激值I的比值是一个常数K。对应于等效光幕亮度、察觉对比度和视觉辨识能力为:等效光幕亮度对应原刺激值I,察觉对比度中目标亮度相对于等效光幕亮度的增量对应ΔI,常数K则对应驾驶人辨识能力。即入口段亮度的设计值必须使目标物在人眼中的主观视亮度与目标察觉阈值的比值大于0.28(CIE推荐的最低察觉对比度值),以保证人眼能够及时对目标物进行辨识,满足行车的安全性需求。
2011年,北美照明工程协会[5]提出驾驶人主观评价法(safety rating numbers)作为辅助评价方法。胡英奎等[15]基于等效光幕亮度理论,提出采用数值积分的方法确定各圆环边界对应视角的优化方法。Weng等[16]结合室内试验,对察觉对比度法中的对比显示系数qc进行了分析和优化。Mehri等[17]基于等效光幕亮度的察觉对比度法,对隧道入口段、过渡段、中间段和出口段的等效光幕亮度进行实测,结果表明:察觉对比度法在隧道洞内的测量应用具有一定的局限性。梁波等[18]在研究优化逆光照明条件下的隧道照明灯具布灯参数时,引入中央视觉和周边视觉的小目标可见度(small target visibility),以更准确地评价隧道照明质量。
综上,当前国内外研究对驾驶人视觉辨识能力的考察,其优点在于充分考虑了环境因素(挡风玻璃与大气散射)和人眼视野范围对驾驶人主观视亮度的影响,使得在研究中对亮度这一物理量的考察更为精确;但其缺点在于这种方法在研究过程中忽略了相对色温、相对光谱分布、光源显色性等物理量指标对驾驶人的影响,以及包括亮度在内的上述物理量指标在行车过程中动态变化对驾驶人产生的影响。根据胡治国等[19]、金海等[20]的相关研究表明,相对光谱分布、相对色温和光源显色性等指标的变化都会影响人体的主观视亮度,进而会影响人体对目标物的辨识能力。因此,未来可以考虑对人眼主观视亮度的计算方法进行修正,进一步考虑相对色温、相对光谱分布和光源显色性等光环境物理量指标对其的影响,并研究上述物理量动态变化过程中的驾驶人辨识能力变化特征。
1.2 隧道光环境下驾驶人视觉功效研究现状
视觉功效理论起源于20世纪30年代,由英国学者Weston[21-22]引入到交通安全领域; 发展至20世纪60年代,荷兰学者Schreuder[8]结合公路隧道不同区段的照明特点,创建了模拟公路隧道视觉环境的室内视觉模型,以一定阈值条件下75%视标察觉率为指标进行评价。视觉功效(visual performance)指被测试主体的视觉系统对一项视觉任务所做出的反应速度和精确度[23],与驾驶人的感知—反应—制动生效过程一致[10],驾驶人停车过程及反应时间示意如图3所示。伴随着中间视觉光度学的研究[24],因视觉功效理论考虑了视觉感光锥杆细胞同时存在并共同作用的亚相加性问题以及视觉颜色通道和非颜色通道的拮抗问题[25],“视觉功效”理论在表征视觉真实感知方面被广泛使用。2012年,Rea[26]在论证交通条件下照明对驾驶员视觉功效的影响时指出,驾驶人视觉功效与交通安全息息相关。
图3 驾驶人停车过程及反应时间示意图[27]
在隧道照明方面,崔璐璐等[28]采用基于反应时间的视觉功效理论,研究不同光源光色特性如相对色温、光谱能量分布等对驾驶员视觉功效的影响。何世永等[29]基于视觉功效研究不同隧道光环境下,如隧道侧壁分别采用水泥砂浆、瓷砖和蓄能反光涂料时,隧道光环境对驾驶人视觉反应时间的影响。Liang等[30]在2车道静态室内仿真模型中,研究了中间段低亮度环境下环境相对色温对驾驶人视觉功效的影响;刘英婴等[31]在类似的试验中得出相似的结论,但是试验结果表明色温并不是唯一相关因素,由于“光生物效应”的影响,色温相似而光谱能量分布不同的光源对照明效果影响不同,选择高色温且黄绿光成分较多的光源可以提高人眼灵敏度并显著提升驾驶人视觉功效。
在隧道入口段暗适应方面,黄彦[32]基于隧道内部复杂照明环境行车时司乘人员视觉特点进行室内模型试验,结合隧道内部视觉适应的主要影响因素建立视觉功效、司乘人员瞳孔尺寸以及照明环境的关系模型,对目前国际中以 CIE 标准暗适应曲线的设计方法进行修正。He等[33-34]结合自主研发的隧道光环境动态仿真平台,对驾驶人以80 km/h驾车经过南向隧道时的光环境亮度变化和驾驶任务进行模拟,以公路隧道光环境亮度梯度降低条件下的光谱能量分布对驾驶人视觉功效响应机制为对象进行研究,通过样本试验指出,在动态暗适应条件下驾驶人视觉光谱灵敏度曲线提前向短波方向移动,由此导致驾驶人的视野亮度动态感知状态发生改变,进而对驾驶人视觉辨识度产生影响。杜峰等[35]利用视觉功效试验获得了驾驶人在隧道洞外亮度不断变化且隧道入口段色温和亮度不同条件下的反应时间,并对不同色温下的折减系数进行修正。
在隧道出口段明适应方面,董丽丽等[36]以市面上常见的LED灯具作为研究对象,分析出口段亮度与照明灯具色温对驾驶人视觉功效的影响,研究结果表明:隧道出口段亮度越大,驾驶人明适应过程中瞳孔面积变化越平缓,能有效提升驾驶人的视觉功效;同时,由于感光色素的光化学反应,在相同的亮度水平条件下,采用较高色温的照明灯具能够显著提升驾驶人的视觉功效,降低驾驶人在出口段的明适应持续时间。傅顺[37]基于驾驶人的生理特征,以瞳孔震荡持续时间表征驾驶人在出口段行车过程中的明适应持续时间,研究表明:在隧道出口段设置限速区段,将车速控制在70 km/h以下时,可以有效减少明适应持续时间、提升驾驶人的视觉功效与行车安全性。肖尧等[38]基于视觉功效理论研究公路隧道出口段“白洞”现象的改善措施,研究结果表明:在隧道出口段侧壁采用渐变图层设计方案,能够有效缓解出口段的亮度过渡,提升驾驶人的视觉功效、降低驾驶人的视觉负荷。
综上,视觉功效主要用于考察不同光环境下驾驶人对小目标的识别能力和丢失率,表明驾驶人在隧道光环境下识别障碍物、完成刹车制动的综合表现能力。但是,随着研究的不断深入,采用视觉功效法对隧道光环境进行研究也暴露出以下2点问题:1)由于视觉功效法的使用依赖于不同对比度、视标偏心角的小目标产生,而试验场景局限于室内试验,这就导致在研究中忽略了复杂的现场因素对驾驶人视觉功效的影响和动态行驶过程中驾驶人视觉特征和心理特征对视觉功效的影响;2)分析过往研究的重点发现,研究人员在研究过程中往往忽略了长时间行驶后驾驶人视觉疲劳累积对驾驶人视觉功效的影响。上述2点问题也导致了研究结论与实际应用的结果会存在出入。针对第1点问题,可以考虑将虚拟现实技术(VR)引入到室内试验中,对隧道光环境进行深度模拟,使得试验的结果更为准确,目前国内已有高校将虚拟现实技术引入到心理学试验研究中[39];针对第2点问题,在未来的室内试验中可以考虑让试验人员进行重复试验,以分析疲劳累积对驾驶人视觉功效的影响。
1.3 隧道光环境下驾驶人视觉负荷研究现状
当驾驶人驾车经过隧道时,随着隧道光环境的变化,驾驶人的眼动参数如注视、扫视、眨眼、瞳孔直径变化等,生理参数如脑电(EEG)、心电(ECG)、肌电(EMG)等均会发生相应的变化。随着驾驶人眼动追踪技术和生理参数监测技术的快速发展,结合驾驶人眼动、生理参数表征其视觉负荷,研究驾驶疲劳是当前隧道光环境下驾驶响应的研究热点之一。驾驶人眼动-生理实车试验如图4所示。

图4 驾驶人眼动-生理实车试验
目前,基于眼动参数表征隧道光环境下驾驶人视觉负荷的研究主要包括:1995年,Verwey[40]研究发现驾驶人在接近隧道过程中的瞳孔变化,并指出可通过视觉负荷评估改善隧道入口行车安全;2007年,杜志刚等[41]以高速公路隧道进出口驾驶人的瞳孔变化为研究对象,选取换算视觉震荡持续时间作为驾驶人视觉舒适度评价指标,用于评价隧道进出口驾驶人视觉负荷程度和行车安全;2008年,杜志刚等[42]以瞳孔面积最大瞬态速度值为视觉负荷评价指标,研究高速公路隧道进出口驾驶人视觉障碍与驾驶视觉舒适性和视觉负荷的相关关系;2016年,阎莹等[43]以隧道群路段驾驶人瞳孔变化为研究对象,分析了隧道群环境光照度、隧道纵深与驾驶人瞳孔面积的相关关系;胡江碧等[44](2014年)、胡英奎等[45](2016年)采用瞳孔面积变化率作为评价隧道入口段照明条件的安全舒适性指标,建立驾驶人在隧道入口段瞳孔面积变化率、亮度折减系数及运行速度的逻辑回归模型;2017年,He等[46]基于驾驶人注视点区域、注视时长、注视次数、瞳孔直径和瞳孔直径变化速率等参数描述驾驶人在不同隧道侧壁光环境下的驾驶响应特征;2020年,焦方通等[47]选取瞳孔最大瞬态面积速度值作为评价驾驶人视觉疲劳的指标,研究表明,由于城市水下隧道的照明条件更优,驾驶人在城市水下隧道行驶过程中的明、暗适应时间相较于普通隧道更短,行车过程更舒适;2020年,赵晓华等[48]基于驾驶模拟试验测试,将微观驾驶行为和眼动数据结合,对长大隧道光环境下突起路标的作用效果进行评估。
对驾驶人的生理参数如脑电、心电、肌电的研究主要包括:2011年,丁光明[49]以特长隧道、长隧道和短隧道环境下驾驶人生理指标如心率、呼吸率的变化特征为研究对象,研究了高速公路隧道环境对驾驶人生理及心理的影响;2020年,吴玲[50]、朱彤等[51]以特长隧道环境中心理负荷变化特性为研究对象,利用实车试验实时采集的心电信号,基于心率和心率变异性指标构建了基于因子分析的心理负荷计算模型。
目前,在研究隧道光环境下驾驶人视觉负荷时多与视觉疲劳、驾驶疲劳相关联。1996年,Stern等[52]采用模拟试验的方式,研究眨眼等视觉特性与视觉疲劳之间的相关性,研究表明眨眼频率和眨眼持续时间与驾驶人视觉疲劳有较好的相关性;1997年,Eriksson等[53]在相关研究中表明,采用眼睑闭合时间也可以对驾驶人视觉疲劳进行表征;2009年,Reimer[54]研究了视觉环境和视觉任务之间的关系,研究表明瞳孔大小、眨眼率、注视停留时间等指标可以有效评价驾驶人的视觉疲劳;2020年,李鑫等[55]以自然驾驶条件下驾驶人生物信号脉搏波为数据源,建立了基于脉搏波特征的驾驶疲劳检测模型;同年,闵建亮等[56]基于驾驶仿真模拟试验,以26名清醒和疲劳驾驶人的前额脑电信号为研究对象,提出了基于前额脑电信号多尺度小波对数能量熵的驾驶疲劳检测方法。
综上,隧道光环境下驾驶人的视觉负荷与隧道光环境的物理量息息相关,但是目前仍然缺乏对多个生物量指标进行多源融合的可行性研究。国内外的研究者部分选取驾驶人的瞳孔参数作为反映驾驶人视觉负荷的指标,也有部分研究者选取心电、皮电、脑电等生理指标作为反映驾驶人视觉负荷的指标。上述各类生物量指标均为反映同一目标客体(视觉负荷)的不同表达方式,但是考虑到隧道光环境自身的复杂性,以及人体对环境刺激的响应是身体多器官的协同响应,在研究中选取单一的生物量参数作为评价驾驶人视觉负荷的指标,会导致研究结论存在一定的片面性。
视觉疲劳是一种非常复杂的生理和心理现象,目前世界上对视觉疲劳并没有形成共同的定义与严格的认识。为了研究的便利性,在隧道光环境信息感知研究领域内,常选用眼动参数与生理参数对驾驶人的视觉负荷进行表征,但是各类指标对驾驶人视觉负荷的表征却存在不同的侧重点。眼动参数中的瞳孔直径、瞳孔面积侧重于反映隧道光环境亮度指标的变化对驾驶人视觉负荷产生的影响,而注视持续时间、扫视特性等参数则通过表征驾驶人获取光环境信息的难易程度来反映驾驶人的视觉负荷;心电指标目前常选用心率及心率变异系数等参数,通过表征驾驶人的心理紧张程度来反映驾驶人的视觉负荷;皮电指标是通过表征驾驶人在驾驶过程中累积的肌肉疲劳来反映驾驶人的视觉负荷;脑电指标是通过测定驾驶人的α、β、δ、θ等不同频带的脑电波表征驾驶人的清醒程度来反映驾驶人的视觉负荷[57]。由于不同视觉负荷评价指标的侧重点不同,不同的指标间有时并不存在正相关性,以隧道出口段的明适应为例,丁光明[49]在研究中发现,在长隧道及特长隧道出口段,驾驶人注视时间逐渐降低而心率增量出现明显上升趋势。根据过往的研究,注视时间降低表明驾驶人的视觉负荷降低,而心率增量升高则表明驾驶人的视觉负荷升高[58-59]。
实时荧光定量RT-PCR法检测结果见图3,模型组、阳性药物组、杆努尽烟高、低剂量组大鼠TLR4 mRNA含量与正常对照组相比均显著升高(P<0.05),其中杆努尽烟高剂量组较接近正常对照组。阳性药物对照组、杆努尽烟高、低剂量组大鼠TLR4 mRNA含量与模型组相比均显著下降(P<0.05)。
因此,在未来隧道光环境下,驾驶人视觉负荷的研究中应考虑到不同视觉负荷指标间的差异性,选取多种视觉负荷评价指标并对其进行综合分析,由此可提升驾驶人视觉疲劳表征的可靠性。
1.4 考虑视错觉的隧道光环境信息感知表征方法的研究现状
视错觉指的是人眼视觉系统在观察物体时,基于知觉经验或不当参照物等形成的与客观事实不一致的特定感知,它能从独特的角度显示出视觉系统的认知功能和机制[60]。视错觉产生机制研究主要包括侧抑制神经网络说、眼动理论和三色色觉学说等,但是当前仍然没有一种理论能够解释所有的视错觉现象。
Ahmed等[61]从神经学的角度对运动错觉进行解释,表明人体对运动现象的认知处于V5神经元处,并向高级视觉皮层进行传送,不同的视觉信息传递到V5区时激活对真实运动响应的神经元,从而使人体产生运动的感受。Bucchi等[62]从心理学的角度对处于交通环境下的驾驶人视错觉产生进行解释,表明知觉是大脑通过感官获取信息的过程,但由于知觉恒常性的存在,大脑能够依据经验对感受到的信息进行修正,而视错觉的产生则是由于驾驶环境中存在不当的参照系信息,使人脑产生了错误的修正,进而引发人体对光环境信息的错误感知。
目前,公路隧道环境下视错觉主要是速度错觉和线形感知错觉。2016年,Wan等[63]研究了不同颜色组合与时间频率的侧墙标记线对驾驶人的视错觉缓解作用,通过定义主观同等速度(SESS)对不同类型的标记线进行评价,研究表明采用红白组合、时间频率为4~8 Hz时可以使驾驶人产生适当的速度高估从而降低行驶速率,保证驾驶的安全性。2017年,杜志刚等[64]指出由于公路隧道特殊的半空间管状结构特点,隧道洞外亮度高、视野开阔、景观及交通设施丰富,为典型的强视觉参考系;隧道洞内,尤其是中间段亮度低、参照物少和景观单一,属于弱视觉参考系,当驾驶人以一定车速快速通过公路隧道洞口时,会发生强弱参考系的快速转变;当驾驶人在洞内弱参考系下行驶时,易产生视错觉现象。
综上,当前国内外学者对于隧道光环境下视错觉的研究主要是从隧道光环境构筑物的角度,通过增加隧道光环境中的视觉参考系并设计隧道光环境中各种视觉参考系的边缘率和流光率,来缓解驾驶人在行车过程中的视错觉现象(见图5)。但是,国内学者刘兵等[65]指出人眼的视觉停留特点也是诱发驾驶人视错觉现象出现的原因之一,并采用结构方程模型(SEM)对隧道光环境下驾驶人的视错觉产生机制进行了进一步的解释。目前,学界对于隧道光环境下驾驶人视错觉产生机制的认识仍处于发展阶段,后续研究仍应进一步加深。同时在道路工程领域,俄罗斯学者Rakcheeva[66]指出,在线形复杂的道路交通状况下,道路宽度的不同会诱发驾驶人产生Poggendorff视错觉,考虑到城市地下立交也具有线形复杂的特点,在后续研究中也应重视除视觉参考系外的其他隧道光环境影响因素对驾驶人视错觉的影响。

图5 RPMs的视觉参考作用[48]
2 隧道光环境下驾驶人信息感知表征方法研究进展
隧道光环境下驾驶人视觉辨识能力是一种静态定量的信息感知表达方式,驾驶人视觉功效是考虑识别速度的动态信息感知表达方式,视觉负荷是驾驶人实际驾车通过隧道时一种侧面的动态信息感知表达方式,视错觉是存在于隧道光环境信息感知过程的一种现象。
目前,隧道光环境特征主要采用亮度(均匀度)、光色(如光谱能量分布、色温)、视觉诱导、频闪、眩光等物理量指标描述。但是,上述几类信息感知表征方法的研究现状表明,驾驶人在驾车经过公路隧道时对光环境物理量指标的真实感知呈现复杂的非线性关系。基于驾驶人驾车经过公路隧道时生理指标(如眼动、脑电、心电、肌电等)变化规律可推断,不同隧道光环境下驾驶人生理状态发生变化,即由光环境物理指标引起生物量的变化,从而影响驾驶人对隧道光环境的真实感知效果。
基于此,目前隧道光环境信息感知表征方法研究最新进展主要体现在以下2个方面。
2.1 基于驾驶人视认行为的隧道光环境信息感知表达方法研究
2012年,由国际照明协会主办的第二届“照明质量与能源效率”大会在我国杭州召开,芬兰学者Puolakka等[67]在大会上指出,从驾驶人注视点出发定义视野感知区域有助于揭示动态交通光环境下驾驶人最真实的视野感知、适应过程。2018年,美国学者Navvab等[68]在IEEE环境与电气工程峰会上指出,从驾驶人注视点出发来表征驾驶人在交通照明条件下视觉的适应亮度,是一种从驾驶员视角开展智能照明研究的新方法。
驾驶人驾车经过公路隧道过程中,主要通过注视特征获取光环境信息;同时,通过注视点传递至视网膜的光环境信息,势必会引起视觉感知、适应和视觉注意[69]。因此,结合动态光环境下驾驶人视觉注视点分布规律,研究驾驶人视野亮度的感知和适应状态成为当前的研究热点。
结合驾驶人注视点分布特征,Cengiz[70]选取白天、夜间(夜间照明、夜间无照明)不同道路光环境条件开展实车试验,记录驾驶人注视点分布和路面亮度分布情况,并结合注视点分布概率计算分析1°、5°、10°、15°、20°视野范围的亮度分布,指出随着视野范围值增大、平均亮度降低,驾驶人夜间行车注视区域分布受道路照明和车灯照明共同影响。2016年,Uchida等[71]结合场景亮度法分布、观察者的眼球运动、周围亮度效应和测量面积4个因素建立视野坐标并进行计算,表明驾驶人注视点区域的平均亮度与视野感知亮度非常接近,但区域范围大小有待深入研究。Winter等[72-73]利用眼动参数和现场亮度分布测量,对城市道路和郊区道路的静态亮度场景和动态亮度场景的注视点亮度进行对比,指出动态场景注视点亮度高于静态场景注视点对应的亮度;采用驾驶人前方10°视角范围的平均亮度和采用路面平均亮度将会导致对驾驶人真实感知亮度值的过高估计和过低估计,动态视野亮度的确定应综合考虑视野亮度影响区域和驾驶人的感知状态。
综上,基于驾驶人注视点分布规律的视野动态亮度感知机制定量表征方法将有效修正当前国内外规范中关于Lseq和L20的测算误差,同时使隧道驾驶人的主观视亮度测定更加精确,有助于构建更加安全、节能的隧道光环境。
2.2 考虑 “光生物效应”的隧道光环境信息感知表达方法研究
驾驶人对光环境的感知除了视觉感知之外,人体还会通过非视觉通道对光环境产生非视觉响应,其中包括光环境会影响人体内部计时机制、人体昼夜节律系统、情绪变化等,这些响应被称为人体的“光生物效应”[74]。
2002年,Berson等[75]在前人研究的基础上指出,人眼视觉系统感光细胞除了视杆细胞和视锥细胞以外还有视网膜神经节感光细胞(ipRCGs),该细胞占据神经节细胞的1%~5%,主要通过将光信息传入视交叉上核并进一步传至下丘脑的松果体中影响人的内分泌、昼夜节律、瞳孔大小等,被科学杂志誉为10年来最重要的发现之一[76]。影响“光生物效应”的因素主要有光谱、光强、照射方向、暴露时间和暴露历史等[77-78]。目前,照明“光生物效应”的研究主要集中在室内照明方面。但一方面,由于我国隧道如超长山岭隧道、越江隧道、城市下穿道等的修建,驾驶人在隧道光环境下需完成一定的驾驶任务,会导致“光生物效应”的影响凸显;另一方面,随着我国驾驶人样本多样化发展,尤其是老龄化严重导致的老年驾驶人群增多,由照明光生物效应引起的问题也会日益严重。
因此,在隧道光环境信息感知相关研究中考虑“光生物效应”对驾驶人的影响,有助于更全面、深入、完整地厘清驾驶人对隧道光环境信息感知的全过程,从而实现隧道驾驶人行车舒适度的提升。
3 结论与展望
隧道光环境下驾驶人信息感知受物理量和生物量共同影响,同时对驾驶人信息感知的不断深入认识可以助力于“智慧照明”的发展与复杂运营条件下光环境构筑物的设计。结合本文的研究,主要结论如下:
1)隧道光环境下驾驶人感知到的信息,在主动认知架构下主要由实际感知的物理量决定,并受生物量影响。参考前文指出,驾驶人在交通隧道光环境下的视觉信息感知(目标物辨识、速度感知、距离感知等)主要由亮度、环境相对色温、环境光谱分布等物理量决定,同时人体的光生物效应以及视觉恒常性等视觉生理特性会影响驾驶人的生物量,进而影响驾驶人的信息感知。但是,目前的相关研究往往仅将研究对象局限于物理量对驾驶人信息感知的影响。基于此,在未来的交通隧道光环境下驾驶人信息感知相关研究中,应综合考虑光环境的物理量以及驾驶人的生物量对驾驶人视觉信息感知的影响,以期更全面地反映驾驶人对视觉信息感知的全过程。
2)隧道光环境信息变化,影响物理量和生物量在不断变化。驾驶人在隧道行驶过程中,由于光环境信息的不断变化,物理量(亮度、环境相对色温、环境光谱分布等)和生物量(瞳孔面积、心率变异系数、脉搏波等)也在不断变化中。但是目前的相关研究中,都仅分析特定静态光环境下物理量和生物量的特性,而忽略了两者的动态变化过程以及变化过程中的关联性。因此,在未来的交通隧道光环境下驾驶人信息感知相关研究中,尤其是特长隧道条件下的信息感知研究,应注重分析物理量以及生物量的动态变化特性,以及生物量受物理量影响的变化规律。
3)当前应用于隧道照明条件下的“智慧照明”多是基于洞外亮度、车流量、洞口朝向等基础参数,结合照明智能控制技术对洞内照明灯具的输出功率进行设置,使得隧道光环境物理量参数(亮度)更符合于规范要求。但是从驾驶人信息感知的角度看,驾驶人主观视亮度并不完全取决于光环境亮度值,同时也受注视点、瞳孔面积等生物量的影响。因此,在未来发展中也应尝试将驾驶人的各类生物量纳入到“智慧照明”的考虑范围内,从驾驶人信息感知的角度构建更为节能、舒适的隧道光环境。
4)驾驶人信息感知在复杂运营条件下隧道光环境中的应用,如在隧道群、地下立交、城市水下隧道和超特长隧道光环境中的应用。
①驾驶人在隧道群环境中行驶时,最突出的问题是剧烈、频繁的亮度过渡导致的驾驶人视觉负荷急剧增加。前文中指出亮度过渡曲线、隧道纵深等光环境物理量因素与驾驶人的视觉负荷息息相关。尽管目前学界对于量化的相关关系尚无明确认识,但是在未来随着对驾驶人视觉负荷认识的不断加深,业内对视觉负荷评价指标作出统一认识,可以将隧道出入口的各类光环境物理量指标(洞门类型、减光构筑物设计参数等)纳入研究范围之内,得出缓解隧道群环境下驾驶人视觉负荷的针对性方案。
②地下立交是目前领域内研究的重点,多存在于城市中。参考上文视错觉中的研究,驾驶人在地下封闭环境中会出现速度错觉、线形错觉、距离错觉等视错觉现象,地下立交线形复杂的同时伴随大量的车流,存在较大的安全隐患。在未来随着隧道环境下驾驶人视错觉研究的不断深入,可以通过优化RPMs、侧墙诱导线、反光环等视觉诱导设施的设计参数,提升光环境物理量设置的合理性,完善驾驶人的信息感知。
③城市水下隧道区别于一般隧道的特点在于其出入口常伴随坡度较大的上下坡,且由于复杂的行车环境,较易出现追尾等安全事故。上文汇总的驾驶人信息感知表征方法中的视觉功效法主要用于综合评价驾驶人发现障碍物并完成制动的综合表现能力,因此将视觉功效法应用于城市水下隧道出入口段的驾驶人信息感知表征具有较强的适用性。以驾驶人视觉功效作为评价依据,研究城市水下隧道各类光环境物理量的设置参数,将有助于提升驾驶人行车安全性。
④超特长隧道光环境的突出问题在于驾驶人长时间、长距离行驶在幽闭、低亮度的隧道环境中视觉负荷较大。区别于普通隧道驾驶人视觉负荷的研究,超特长隧道驾驶人的视觉负荷需要考虑行驶时间累加对其生物量的影响。因此,在后续研究中更应从动态表征的角度分析时间效应对驾驶人生物量的影响以及在物理量动态变化过程中驾驶人生物量对其的响应规律,为后续光环境构筑物的设计、光环境物理量的优化提供依据。