基于透镜阵列的三维姿态角度测量
2022-03-08杜明鑫闫钰锋才存良白素平
杜明鑫,闫钰锋,张 燃,才存良,于 信,白素平,于 洋
(长春理工大学 光电工程学院,吉林 长春 130022)
1 引 言
在航空航天领域,受重力、太阳辐射、机械振动等因素的影响,在航天器飞行过程中,有效载荷与基准点之间的连接臂会发生轻微变形[1-4]。有效载荷相对于基准面会发生小角度的偏转,从而影响有效载荷的工作性能[5]。如果能够实时、准确地测量偏转角度,就可以通过软件补偿减少甚至消除影响,这要求测量系统具有体积小、功耗低、精度高的特点。另外,在进行深空激光通信时,需要保持两个通信终端的准确对准和跟踪,这是光通信链路成功建立和维护的关键。因此,体积小、功耗低、精度高的角度测量系统将在航天、航空和国防技术领域有广泛的应用前景。
目前,微小角度检测方法主要基于光学角度测量理论,如自准直法[6-8]、光栅法[9-10]、菲涅尔双棱镜法[11]、激光干涉法[12]、图像处理[13-15]等。
自准直法可以利用反射图像点的位置来实现角度测量,其测量精度由光学元件之间的距离决定。Konyakhin等通过补偿算法消除了渐晕误差的影响,提高了自准直仪的测量精度[16]。该方法可满足二维角度的测量,但却不能满足三维角度的同时测量。
作为激光自准直仪的接收装置,衍射光栅也可以用来测量角度。但是,由于入射光束与自准直仪单元轴线之间的夹角是一个未知参数,所以带衍射光栅的激光自准直仪只能用于测量相对角度。在该方法[17]中,采用飞秒激光器[18]和衍射光栅作为测量光源和反射器,利用反射器发出的光与飞秒光束的一阶衍射光束可以准确识别一维角位移。
菲涅尔双棱镜可用于制作复式干涉仪,在双束干涉条纹背景下,可获得4束干涉图案,然后通过改变双棱镜相对于剪切方向的相对轴向位置,实现角度测量或校准[19],具有灵敏度高和精度高的优点。但菲涅尔棱镜法的测量系统比较复杂,体积较大、环境适应性相对较差,并且一般只能测量俯仰或方位的相对角度,并不能实现三维角度的同时测量。
对于一些超小的旋转角度,吴玉敏提出了一种基于角谱算法和全息过程中最小二乘相位展开的方法[20]来计算三维形状。这种方法稳定且有效。因此,根据曲面形状与旋转角度的关系,可以计算出实时旋转角度。
以上测量方法并没有很好地实现三维姿态角的同时测量,且在众多工程应用领域中,角度测量尚有一些关键技术需要不断深入研究,如实时测量、高精度、小型化等,而光学方法是解决角度测量问题的有效途径之一。
本文提出了一种基于透镜阵列的微小三维姿态角测量光学系统,该系统主要由激光源、透镜阵列和CCD组成。利用这种方法,可以同时得到俯仰、偏摆、滚转3个角度。测量时,准直光束系统作为发射端;金字塔形排列的4个阵列透镜放置在CCD前,构成接收端。光束透过透镜阵列后,会在CCD上形成光斑阵列,对此数字图像进行处理,通过水平和垂直方向的光斑位置变化,可以得到发射端相对于接收端的俯仰角和偏摆角;通过点阵在CCD上的旋转可以得到发射端和接收端的滚转角;最后可以获取三维空间的位置角。本文提出的测量系统体积小,测量数据间可相互校准,测量数据可靠且可以实现三维角度的同时测量。
2 测量应用及方案
如图1(a)所示,应用场景为轴对中的偏差检测,角度测量装置发射单元安装在右端连接主动轴的电机上,接收单元安装在左端与从动轴相连的减速器上。通过测量发射端发出的激光准直光束相对于接收端所在的CCD接收面之间的入射角度,并进行基准转换即可获得减速器相对于电机的俯仰、偏摆和滚转3个角度。
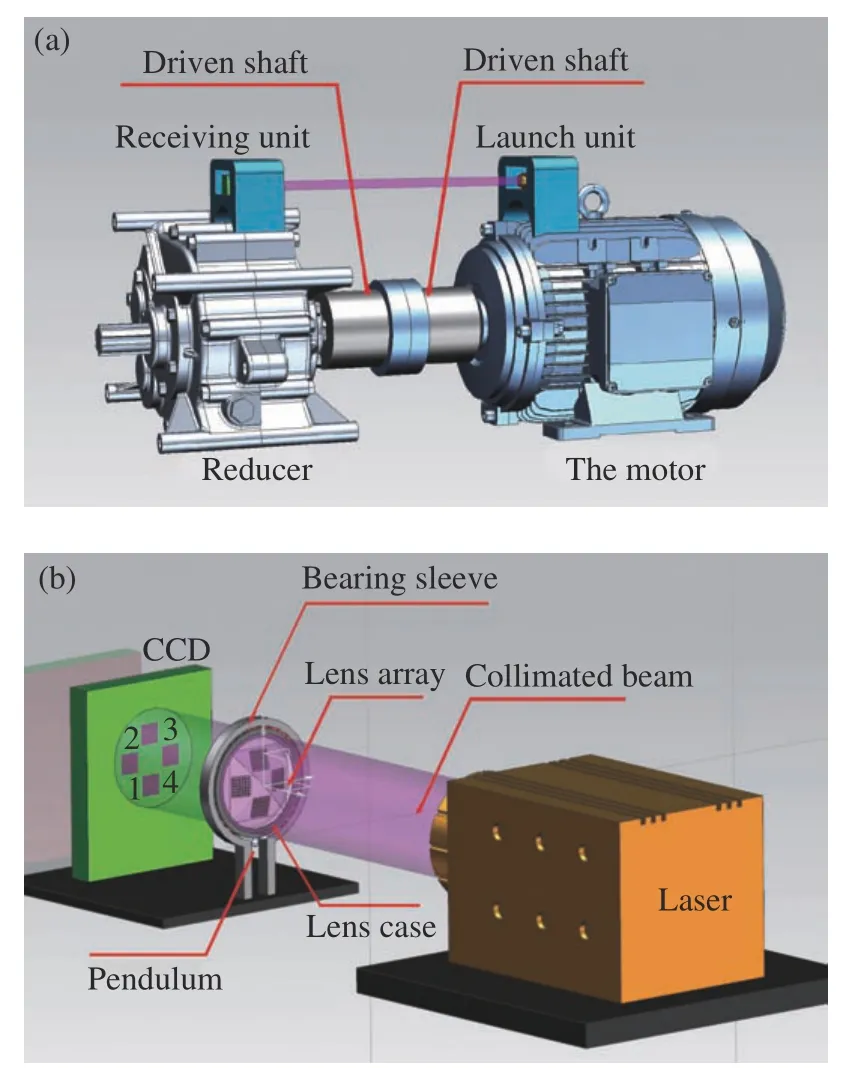
图1 系统结构示意图。(a)应用系统结构示意图;(b)系统原理结构示意图Fig. 1 Schematic diagram of the proposed system.(a)Structure diagram of application system; (b)structure diagram of system principle
图1 (b),从细节上表达了角度测量装置的原理,呈金字塔状排列的4组阵列透镜构成的光学元件作为CCD的入射光学系统,阵列透镜组安放在可绕过金字塔尖且垂直于CCD接收面的轴线旋转,并设计摆锤结构,在重力作用下,始终使阵列透镜竖直轴线保持铅锤状态。当接收端相对于发射端产生水平和垂直方向的角度倾斜即俯仰和偏摆变化时,CCD上接收的光斑会发生相对应的位置变化及光斑间距变化。如发生相对滚转时,CCD靶面绕准直光束光轴发生滚转,而阵列透镜依然保持铅锤状态,此时,准直光束透过阵列透镜在CCD上形成的光斑会发生整体的旋转偏移(如图3所示)。分析光斑位置变化,建立光斑位置变化与入射角度变化的数学模型,可作为透镜阵列测量三维姿态角的理论模型。
该测量方法与传统的测量方法相比多引入了两个系统参数,分别是透镜阵列的焦平面与CCD接收面之间的倾斜角和子透镜间的距离,由此产生的数据冗余可提高测量系统的可靠性。该测量系统可广泛应用于角度测量领域。
如图1(b)所示,标号为1~4的4个透镜阵列用于测量三维空间角度信息,在水平方向和垂直方向上呈对称分布。其中1号和3号透镜阵列分布在水平方向上,其他透镜阵列分布在垂直方向上。4个透镜阵列与CCD接收面之间的角度均相同,焦平面与CCD表面的角度也相同。水平方向的透镜阵列1和3用于测量X方向的光分量,垂直方向的透镜阵列2和4用于测量Y方向的光分量。
3 测量原理与参数分析
3.1 俯仰角和偏摆角
将阵列透镜倾斜放置使得透镜阵列中的各透镜单元与垂直于光电接收器件接收面的平面之间的角度都相同,取其中两个透镜单元与光电接收器件构成的模型研究光线入射角度测量原理即可构建数学模型,多组透镜依据该数学模型联合解算,可寻求最优解以提高精度。由于倾斜角在X和Y方向上建立的数学模型相似,所以只对Y方向和绕Z轴的数学模型建立过程进行分段描述。
如图2所示,当入射光束只向Y轴方向倾斜(绕X轴旋转)时,两个透镜阵列的中心分别用O1和O2表示,CCD接收面的法线分别用O1A1和O2A2表示。

图2 入射光的示意图。(a)向上的入射光线,(b)向下的入射光线Fig. 2 Schematic diagram of the incident light. (a) Upward incident light; (b) downward incident light
β是被测光束的倾斜角,即入射光束的光轴与CCD接收面的法线之间的夹角。C1和C2分别表示CCD上的光斑中心点的位置。FB1表示透镜阵列的焦平面,且O2F垂直于FB1,F是垂足。对于图2所示的其他参数,f是透镜阵列的焦距,l是阵列中透镜之间的距离,α是透镜阵列与CCD的相对角,h是相邻的光斑中心点之间的距离

根据图2(a)所示的几何关系,可以计算出被测光束的入射角β,那么光束在Y方向的入射角βy可以表示为

图2(b)为下行情况下的示意图。O2D1和O1C1交于点E1,入射光的角度βy为

同理,入射光束在X方向倾斜角 βx也可以用式(4)来计算

3.2 滚转角
滚转角是绕Z轴的倾斜角,它是光束与CCD基面之间的角度。理想情况下,当倾角为零时,CCD接收到的光斑阵列示意图如图3(a)所示,同一列或同一行光斑阵列的中心坐标相同,光斑中心的位置可视为参考位置。
如图3(b)所示,当出现扭转角时,阵列斑点的坐标将发生移动。因此,可以根据点阵中心点的偏移来计算扭转角。那么扭转角可以表示为
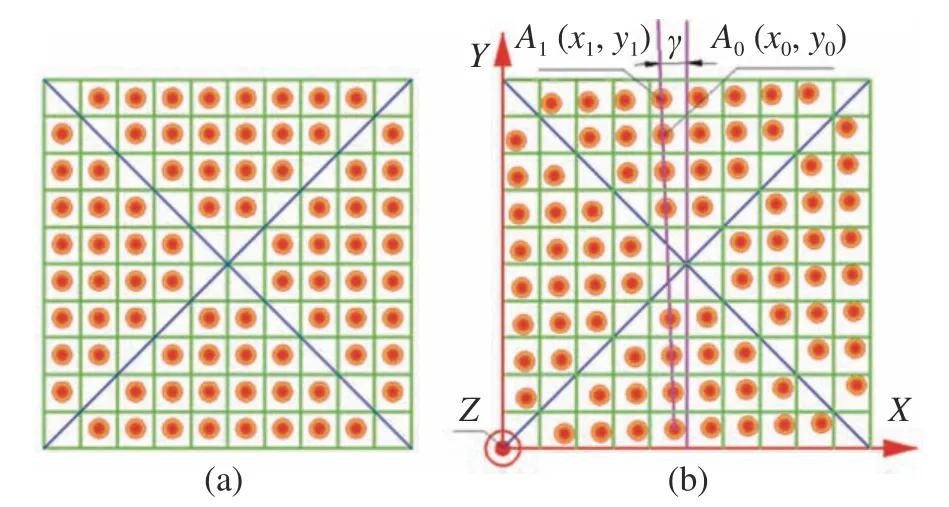
图3 扭转角示意图。(a)扭转角为0时的斑点示意图;(b)扭转角为γ 时的斑点示意图Fig. 3 Schematic diagram for the torsion angle. (a) The spots′ schematic diagram when the torsion angle is 0; (b) the spots′ schematic diagram when the torsion angle is γ

其中,(x0,y0) 和 (x1,y1) 分别为A0点和A1点的质心坐标。
这样通过改变多组阵列斑点的坐标,就可以得到扭转角的多组数据。为了减少随机误差,引入了扭转角的平均值,通过计算多组阵列斑点,也可以计算出制造和装配时造成的系统误差。
3.3 透镜阵列参数分析
为了获得更多近似六边形孔径透镜的模型数据,在制作阵列透镜的过程中,在同一基板上使用了多个间距的阵列元件,阵列在3.5mm×3.5mm范围内以不同的间距排列,如图4所示。相邻两个透镜元件之间的距离分别为1.25 mm、1 mm、0.875 mm和0.5 mm。可以发现,相邻两个透镜单元之间的距离越小,获得的信息就越多,越有利于提高实验精度。综合考虑后,透镜阵列的距离选用0.5 mm。透镜材料的折射率为1.49。每个透镜单元的焦距为6 mm,曲率半径为2.94 mm[21-25]。

图4 透镜阵列的实物图和模拟图。(a)透镜阵列实物图;(b)透镜阵列尺寸图;(c)透镜阵列俯视图;(d)透镜阵列侧视图Fig. 4 Physical picture and simulation charts of the lens array. (a) Physical picture of the lens array; (b) size of the lens array;(c) top view of the lens array; (d) side view of the lens array
为了保证CCD获得的光斑图像可以进行数字图像处理,而不受衍射环对测量结果的影响,光斑不能相互重叠。光源经透镜单元衍射成像,一阶衍射角为

其中,D为透镜的单位孔径,λ为光源的波长。本文中,D=0.5 mm,He-Ne激光器的波长为632.8 nm,所以一阶衍射角为:

CCD上一阶衍射环的直径为:

其中,阵列透镜到CCD的最大距离是b,由此可以得到

对于数字成像来说,CCD上相邻两个点之间的距离约为0.5mm,而一阶衍射环的直径远小于相邻点之间的距离。因此,衍射对测量结果的影响可以忽略不计。
此外,还可以通过控制CCD与阵列透镜之间的距离、相对角度、透镜的焦距、阵列间距等参数,保证光斑与CCD重叠。
由于阵列透镜与CCD 接收面的相对角度α属于安装参数,透镜阵列与CCD发生相对倾斜后使部分光斑离焦而产生像差,为保证成像质量,阵列透镜与CCD 接收面的相对角度 α设计为30°,可以通过高精度标校仪器对其值进行标定,再通过相关冗余实验数据进行数据拟合,得出最佳α补偿值以提升测量数据可靠性,此时的离焦距离范围控制在−0.18~0.18 mm内,不会对质心计算产生影响[26],无光斑重叠现象,为形成优质的光斑图像提供保障。
3.4 多点图像中心点的处理方法
在对光斑图像进行预处理后,可以通过瞬时光斑质心检测法确定光斑质心的准确位置[27]。第一子光圈光斑质心的计算公式为
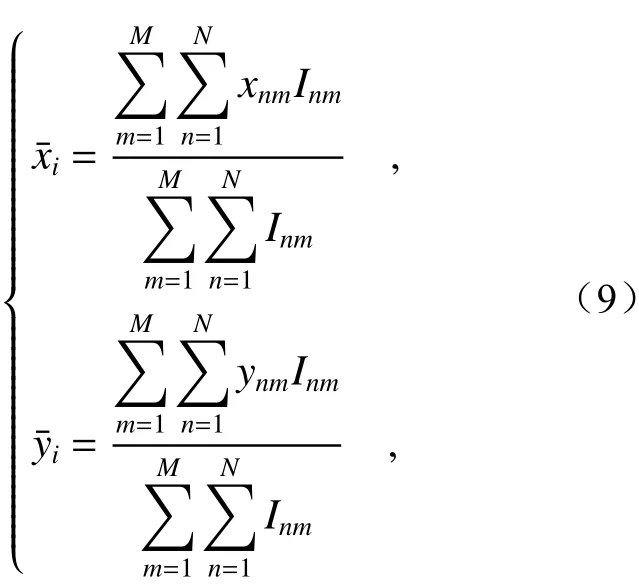

通过对相邻光斑距离数据的处理,可以计算出光斑距离的平均值和光斑间距测量值的残余误差。
通过残余误差观察法可以观察到正、负残余误差的数量。如果正、负误差的数量几乎相等,且误差的分布明显是随机的,可以肯定这组测量数据不存在系统误差。那么,通过贝塞尔函数可以得到相邻光斑之间距离的标准差。
根据 3σ 标准,如果|vi|>3σ,则认为测量值中含有应消除的粗大误差。对点间距值进行循环处理,直到粗大误差完全消除。剩余的值是没有粗大误差的最佳点间距测量值。
3.5 阵列透镜与 CCD 接收面的相对角度的标定与补偿
由式(1)可知,在光线入射角度 β 未知、光斑间距h已知的情况下,通过h一个变量不能计算出 α 的值,所以,可采用多组数据共同计算出 α,并对其进行补偿。
依次给式(1)中的未知量 β 一个微小的增量Δβ,并将初始的未知量 β 用 β0表示,h随着增量Δβ 的变化而改变,可以得到n个方程:
其中,l是 已知量,α 和β0为 未知的定量,h随着增量Δβ改 变。所以,可将 Δβ看 作自变量(用x表示),h看作因变量(用y表示)。式(14)可改写为:
即:

式(16)分别经过点(x1,y1),(x2,y2)···(xn,yn),α 和 β0是未知参数。通过曲线拟合的方法,求出参数 α 和 β0的 值,并得出最佳α 补偿值,此时的 α值置信度更高,可以有效地减少入射光源对其准直度的影响并减少温度变化等外界因素对测量结果产生的影响,从而提升了测量数据的可靠性。
4 实验结果与分析
4.1 实验平台
通过对比实验验证本文测量方法的有效性。如图5所示,实验装置主要由两部分组成。第一部分是基于自准直仪的三维角度测量系统,它由自准直仪1、自准直仪2和自准直仪光线接收反射装置组成。自准直光线接收反射装置安装在三维调节台上。两个自准直器的光轴相互垂直。自准直仪1测量绕X轴和Y轴的旋转角度。自准直仪2测量绕Z轴的旋转角度;实验系统中按正交排列的自准直仪有两个,它们的测量精度均优于0.1″。第二部分是基于阵列透镜的三维角度测量系统。它主要由光源、锥形排列的微透镜阵列和CCD相机组成。实验中,CCD的分辨率为2 048 pixel×2 048 pixel。

图5 实验装置图Fig. 5 Experimental set-up
锥形排列的微透镜阵列与自准直仪的反射镜均固定在三维调节台上。通过调整三维调整台,分别产生X、Y、Z轴方向的角度增量。此时,对本文提出的方法与双自准直仪方法的测量结果进行对比。
4.2 α 值的补偿
通过运动控制器控制转台顺时针转动一个角度,在自准直仪上读出角度增量 Δ β 的准确数值,同时截取光斑图,通过图像处理可以得到x方向的相邻光斑间距h,如此循环,累计采集23组数据,可以得到角度增量 Δ β(1≤i≤23) 以及相对应的 23组相邻光斑间距值hi。
要想进行阵列透镜与C CD接收面的相对角度α的标定与补偿,需要先对相邻光斑间距hi值进行数据处理,以第7组为例,图6为第7组光斑示意图,计算得到相邻光斑间距的平均值为=0.70605mm,并计算得到各相邻光斑间距hi值的残余误差vi,根据判断残余误差计算正确。

图6 第7组光斑图Fig. 6 The seventh group of light spots
由于图像中共有80个光斑数据,将残余误差带入式(13),可得到相邻光斑间距的标准偏差为:

根据莱伊达准则剔除粗大误差数据,该组相邻光斑间距最佳值为h=0.7057mm。
同理,再将其余的22组数据依次作上述处理。
对这 23 组数据进行数据拟合,为完成式(16)的非线性复杂模型的估算求解,采用最小二乘法进行拟合,并找出最优解,图7为相邻光斑间距数据拟合图。
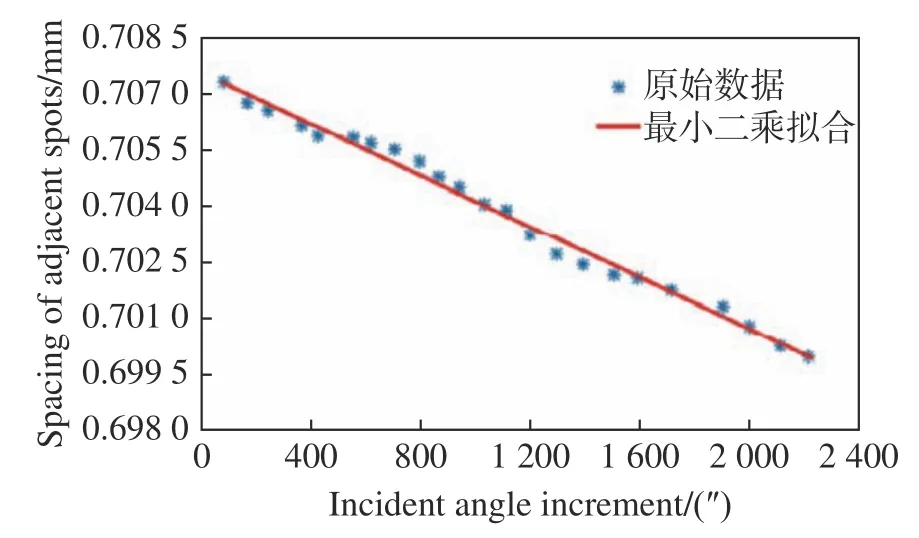
图7 相邻光斑拟合曲线Fig. 7 Fitting of adjacent spots
阵列透镜与光电接收器件的相对角度 α的偏差属于系统误差,通过 α的角度标定进行系统误差补偿。即通过有相对真值特性的入射角度增量,得到 α值的补偿信息,用一次函数进行最小二乘拟合,得到最佳调整补偿,相邻光斑间距h与光线入射角度 β 的关系为:

4.3 实验结果分析
在对 α进行标定补偿后,实验演示了入射光线在X、Y、Z方向旋转的角度差与相邻阵列光斑之间的距离变化。
当入射光束仅有Y方向上的倾斜角时,对应角度光斑图像如图8所示,此时在竖直方向上的光斑间距会随倾斜角度的改变而呈现一定的变化规律。

图8 不同βy值时的光斑阵列图像。(a) βy = 250″;(b) βy =500″Fig. 8 Spot array images with different βy when βx = 0;(a) βy = 250″;(b) βy = 500″
对多组倾角进行测量可以得到从透镜2和4获得的阵列点之间的平均距离以及倾斜角βy值,如图9所示,其中的hx或hy的距离分别由所有行或列的相邻光斑距离的平均值得到。
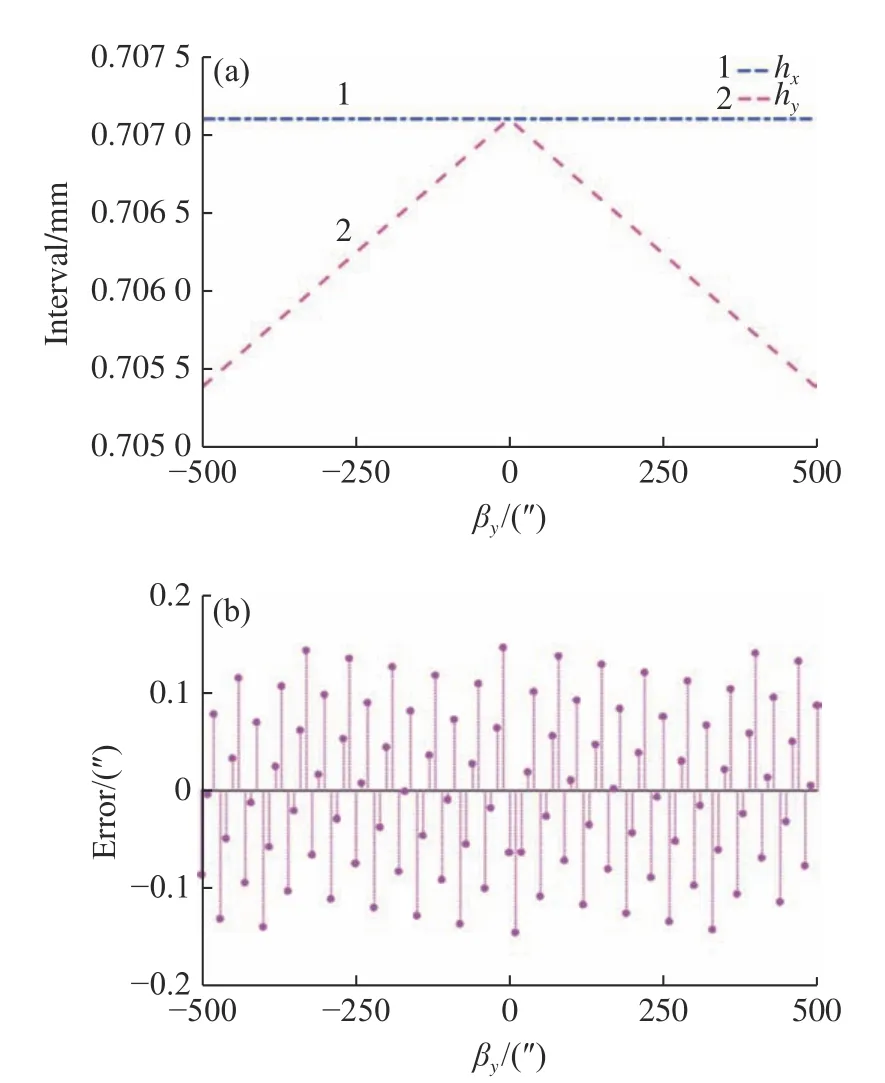
图9 Y方向的测量结果。(a) 质心间距随 βy 变化的曲线;(b) 与自准直仪相比的误差曲线Fig. 9 Measurement results in the Y direction. (a) Centroid spacing changing with βy; (b) error curves in comparison with autocollimators
从图9(a)可以发现,X方向上相邻阵列光斑之间的距离保持在预期水平,而Y方向上相邻阵列光斑之间的距离则随着与平衡点的角度βy差值的增大而趋于减小,βy=0为相邻阵列光斑距离的最大处。图9(b)显示了自准直仪与系统之间的误差,RMS为0.085″。
同样,当入射光束仅在X方向上有倾斜时,角度光斑图像如图10所示,此时在水平方向上的光斑间距会随倾斜角度的改变而呈一定的变化规律。
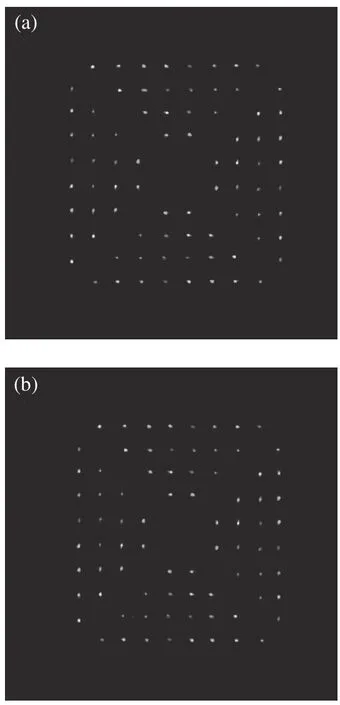
图10 βx值不同时的光斑阵列图像。(a) βx = 250″;(b) βx =500″Fig. 10 Spot array image with different βx. when βy = 0.(a) βx = 250″; (b) βx = 500″
从透镜1和透镜3获得的阵列点之间的平均距离以及倾斜角βx的值,如图11所示。
阵列点在Y方向上的距离hy保持不变,而在X方向上的距离hx随着偏离平衡位置 βx=0的角度增强而趋于减小。
与基于自准直仪的测量系统相比,其误差曲线如图11(b)所示,其中RMS为0.094″。由于测量结构的对称性,当入射光束的角度或方向倾斜时,也会出现类似现象,如图11所示。

图11 X方向的测量结果。(a) 中心点间距随 βx 变化的曲线;(b) 与自准直仪相比较的误差曲线Fig. 11 Measurement results in the X direction. (a)Centroid spacing changing with βx; (b) error curves in comparison with autocollimators
图12(彩图见期刊电子版)为质点 Δx、Δy与扭转角 γ的变化关系。如果X方向上斑点质心Δx的变化为正值,则光束顺时针旋转,否则逆时针旋转。在Y方向上斑点质心的变化 Δy随着扭转角的幅度增加而增大。因此,当顺时针旋转时,测量结果为负,反之则为正。此外,特征点的轨迹近似于圆。
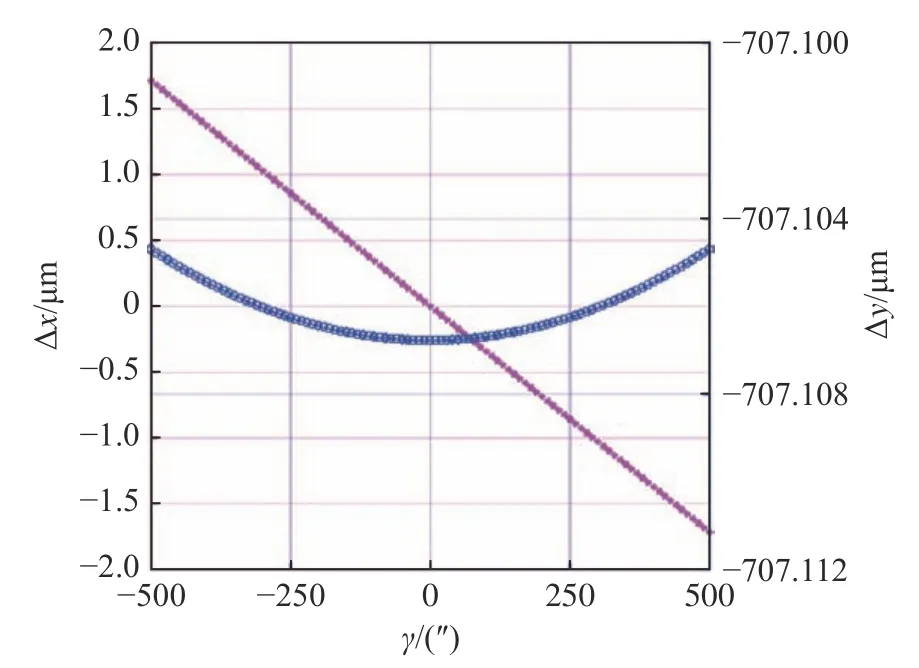
图12 中心点随Z方向倾角变化曲线Fig. 12 Curve of centroid varying with inclination angle in the Z direction
选取透镜阵列1~4形成的光斑中的几组特征点,计算入射光束向Z轴方向倾斜时质心(Δx,Δy)的变化,由式(5)可得到平均扭转角γ。阵列点在X、Y方向的距离不变,与自准直仪相比,测量误差曲线如图13所示(彩图见期刊电子版),其中扭转角γ 的RMS为0.092″。

图13 自动准直仪的对比度误差和X和Y方向的光斑间距Fig. 13 Contrast error compared with the results measured with autocollimator and spot spacing in X and Y directions
5 结 论
针对三维空间微小角度测量的问题,提出了一种基于四棱锥透镜阵列的三维空间微小角度测量方法。建立了阵列光斑与三维位置角的解析关系。通过相关的实验,充分验证了所提出的测量三维角度的数学模型。所提出的系统可以实现对空间三维角的精确测量,并具有体积小、便携的优点。
该方法与自准直仪之间的误差均方根值小于0.1',说明这两种方法的测量精度相当。
如果所提出的系统能在一些实际测量场合中使用,可考虑的挑战性问题如下:在实际应用中,由于环境因素的影响,发射光源的性能会发生轻微变化。由于光束质量下降,阵列光斑的光束发散和质量中心会发生变化,从而导致角度的测量误差。因此,为了保证发射光源的稳定性,必须进行温度补偿和非热性设计。否则,可能会产生不准确的实验结果。