环境自适应灰度循迹传感器设计*
2022-03-07陈栩聪梁新农
陈栩聪 ,袁 飞 ,梁新农 ,丁 韩
(1.汕头大学 工学院,广东 汕头 515063;2.广东技术师范大学 自动化学院,广东 广州 510450)
0 引言
机器人是一种具有自主意识的自动化设备,它融合了电力电子技术、运动控制技术、传感器感知技术和计算机技术等[1-2],在现代化生产生活中发挥着重要作用[3-4]。自主移动机器人技术中机器人环境感知技术是一个重要的研究方向[5-6]。要让自主移动机器人能够精准地按照规划的路径行进,必须通过各种传感器对机器人所在空间位置和行进路径进行识别。
目前,自主移动机器人行进路径的循迹传感器有摄像头[7-8]、激光传感器[9-10]、灰度循迹传感器[11-12]等,其中摄像头传感器对处理器运算能力具有较高要求[13-14],激光传感器容易受到各种光源影响[15-16]。传统灰度循迹传感器具有性能稳定和实现原理简单的优点,也存在着环境适应差的问题。该类传感器在使用之前需要通过电位器手动调节基准电压来适应当前环境和场地,并且在机器人自主移动过程中,如果外界环境发生变化,易出现自主移动机器人循线识别错误,偏离预定行进路径的问题[17-18]。
针对传统灰度循迹传感器环境适应性差的问题,本文设计了一种环境自适应灰度循迹传感器,该新型传感器能够根据环境光照情况,通过微处理器自动对基准电压进行最优化调整,提高了灰度循迹传感器对环境变化的适应能力,提高了自主移动机器人循迹稳定性和环境适应性。
1 整体设计方案
本文设计的环境自适应灰度循迹传感器结构图如图1 所示。该传感器在结构上主要由多路光电检测电路、微处理器模块、电压放大电路、电压比较电路四部分组成。

图1 环境自适应灰度循迹传感器总体设计方案图
环境自适应灰度循迹传感器工作原理如下:
(1)多路光电检测电路包含了多路发光二极管和光敏接收管组成的检测单元,检测单元用于检测其所处位置的地面情况信息,产生反馈电压,各检测单元分别将反馈电压输出给微处理器模块和电压比较电路;
(2)微处理器模块接收到各检测单元的反馈电压后先进行A/D 转换和中值滤波,并据各反馈电压计算出当前环境下最优基准电压值,通过D/A 转换输出基准电压;
(3)电压放大模块将微处理器模块输出的基准电压放大到适合电压比较电路基准端的电压范围内,作为多路比较器实时刷新后的基准电压;
(4)电压比较电路中多路的电压比较器将多路光电检测电路中各路反馈电压分别与基准电压进行比较,最终得到输出多位“0”、“1”数字量作为循迹识别结果;
(5)环境自适应灰度循迹传感器在循迹过程中,顺序执行步骤(1)~(4)并不断循环。
2 硬件设计方案
2.1 光电检测电路
本文设计的环境自适应灰度循迹传感器一共有5路光电检测电路,每路由光敏接收管和发光二极管及其外围电路构成。此电路有较宽的工作电压范围,在电源电压波动时仍能正常工作。图2 所示为单路光电检测电路原理图,其余4 路子电路原理图与图2 相同。

图2 单路光电检测电路原理图
2.2 微处理器模块
光电检测电路检测到的多路电压值分别输入到STM32F373C8T6 微处理器中带AD 转换单元的IO 引脚,对各路检测电压信号分别进行中值滤波,得到各路光电检测电路最终检测电压值。对多路检测电压值经融合计算得到当前环境下最优基准电压值,经DAC 转换后输出给电压放大电路。
本文设计的环境自适应灰度循迹传感器是搭载在移动机器人上,高速移动过程中需要较高的采样率。因此,本设计采用STM32F373C8T6 处理器的12 位分辨率的逐次逼近型模数(SAR)转换器。
STM32F373C8T6 处理器中有3 路12 位分辨率的DAC转换通道,输出的电压分辨率最低可以达到0.81 mV,本设计传感器使用了其中1 路DAC 转换通道。
2.3 电压放大电路
电压放大电路主要是将微处理器模块输出的基准电压进行放大处理,输出给比较器组进行循线识别。本电路利用自稳零运算放大器AD8628 及其外围电路组成,可实现精密数据转换。电压放大器电路原理图如图3所示。

图3 电压放大器电路原理图
2.4 电压比较电路
电压比较电路由5 路电压比较器组成,本设计选用LM393 芯片进行电压比较。将光电检测电路中5 路反馈电压分别与电压放大电路输出的基准电压进行比较后,输出0 和1 的数字量比较结果。图4 所示为电压比较器电路中单路电压比较器原理图。

图4 单路比较器原理图
3 软件设计方案
3.1 软件流程
首先对各个模块进行初始化,然后采集光电检测电路的5 路输出电压,经AD 转换后,将所得5 路电压数值进行中值滤波,滤波后的5 路电压值存入数组,经基准电压融合公式计算得到最优基准电压值,最后通过数模转换器输出模拟电压值至电压放大电路输入端,以更新基准电压。软件流程图如图5 所示。
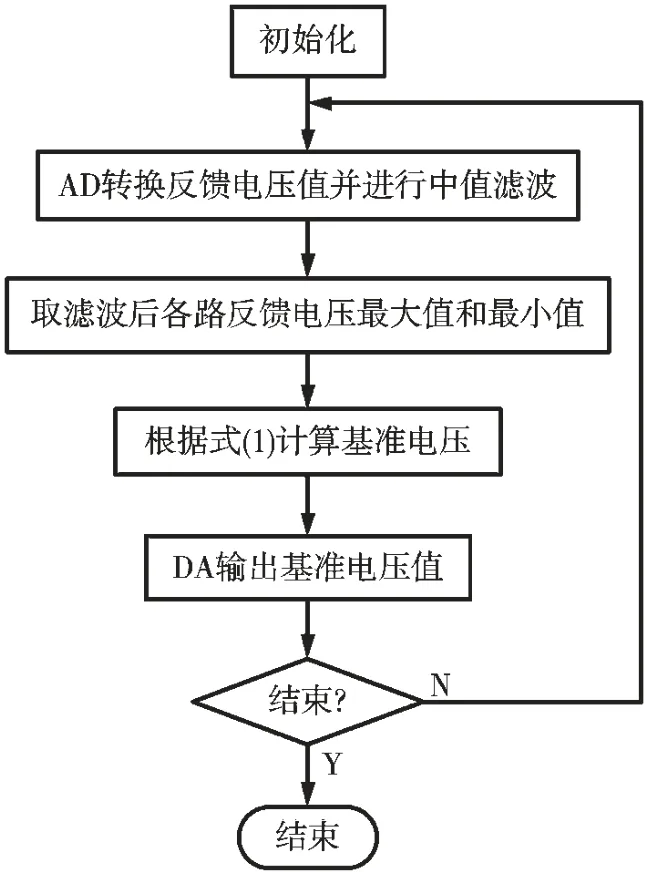
图5 软件流程图
3.2 最优基准电压计算
最优基准电压是根据光电检测电路的反馈电压确定的。即将中值滤波后的电压值存入数组后,取其中的最大值Umax和最小值Umin作算数平均运算得基准电压,计算公式为:

经实验测量可知,基准电压最高不超过4 V,最低不低于2.6 V,所以基准电压的取值区间为[2 600,4 000],故最优基准电压需做限幅处理,其计算公式如式(2):

3.3 中值滤波算法中采样次数N 的确定
对5 路光电检测电路的电压数据进行中值滤波,可减小环境中干扰因素的影响,滤波算法中采样次数N关系到传感器的灵敏度和抗干扰能力,本文通过实验对比,确定了滤波采样次数N=15。
4 传感器性能测试实验
为了对本文设计的环境自适应灰度循迹传感器有效性进行验证,本文从功能性和准确性两方面对其进行测试实验。
测试实验在实验室环境下进行,测试使用主要工具有:照度仪、支架、可调亮度及色温的LED 照明灯、米白色木板地面、浅灰色普通水泥地面。
实验时,传感器水平固定在地面上方,距离地面1.2 cm,照度仪固定在传感器旁边,LED 照明灯利用支架固定在传感器正上方50 cm 处,实验场景如图6 所示。
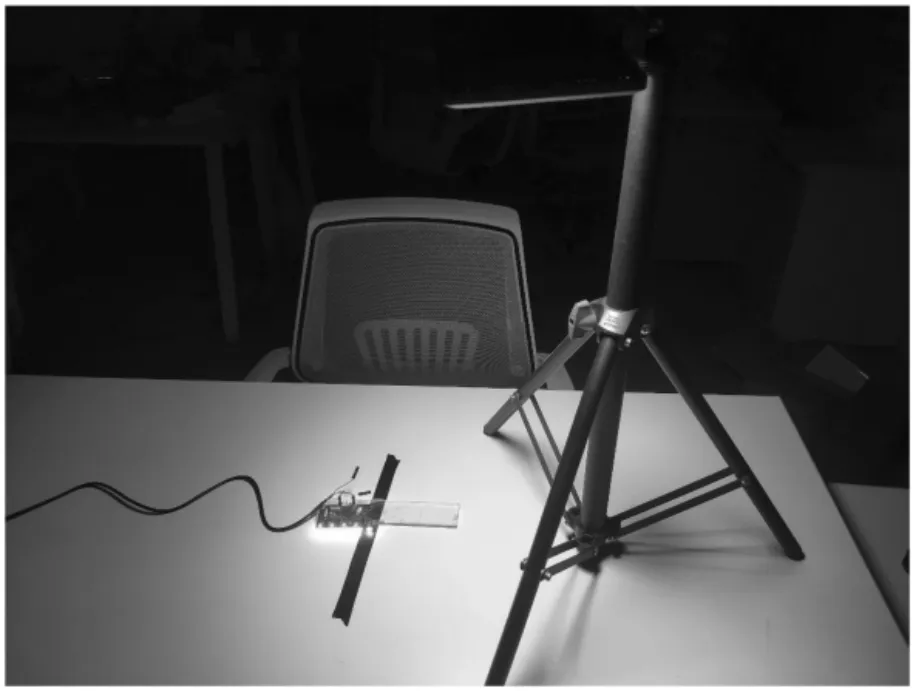
图6 实验场景图
4.1 传感器功能性测试
功能性测试主要目的是测试传感器在多种环境光照变量发生改变时,是否能实现基准电压的自适应调节。此实验选取了3 个光照变量,分别是光照强度、光照色温和地面类型。通过控制变量法,在3 组实验中分别改变某一变量,观察传感器的输出信号以及基准电压情况。
4.1.1 改变光照强度
此实验条件为:米白色木板地面、光照色温4 640 K。变量为光照强度,结合实际,室内光照强度在1 500 Lux以内,室外1 500 Lux 以上,因此实验选取光照强度区间为400 Lux~3 000 Lux,间隔400 Lux 为一组。
实验时,调整LED 照明灯强度以模拟传感器环境的光照强度变化,通过万用表测量电压比较电路的基准电压Uref和比较器输出端数字量,实验结果如表1 所示。
由表1 可知,随着光照强度的增加,基准电压Uref明显增大,且传感器对循迹线识别准确。

表1 改变光强时实验数据表
4.1.2 改变光照色温
此实验条件为:米白色木板地面、亮度500 Lux。变量为环境光的色温,结合实际,选取光照色温区间为3 440 K~5 120 K,间隔为240 K 为一组。
实验时,调整LED 照明灯色温以模拟传感器环境的光照色温变化,通过万用表测量电压比较电路的基准电压Uref和比较器输出端数字量,实验结果如表2 所示。由表2 可知,基准电压Uref基本不随色温的变化而变化,且传感器对循迹线识别准确。

表2 改变光照色温时实验数据表
4.1.3 改变地面情况
此实验条件为:光照亮度500 Lux、光照色温4 400 K,变量为地面的颜色和材质。
实验时,分别在两种地面进行测试,通过万用表测量电压比较电路的基准电压Uref和比较器输出端数字量,实验结果如表3 所示。由表3 可知,水泥地面下测得的基准电压Uref比木地板情况下测得的Uref小,主要是由于水泥地面对光线有漫反射。

表3 改变地面类型时实验数据表
通过3 组实验数据可知,本文设计的传感器的基准电压Uref可随光照强度、色温和地面材质的变化而变化,使传感器的循迹结果准确。
4.2 传感器准确性实验
准确性测试目的是测试环境自适应灰度循迹传感器在环境变量发生改变时,输出的基准电压Uref是否与理论基准电压值一致。实验条件为:米白色木板地面、光照色温4 640 K,实验数据如表4 所示。

表4 系统准确性实验中测得各项数据
由表4 数据可知,在光照强度发生变化时,环境自适应灰度循迹传感器输出的基准电压Uref与当前光照强度下理论基准电压基本一致,偏差小于0.03%。表明设计的传感器在外界环境发生变化时,能够输出最优基准电压值,保证循线识别准确性。
5 结论
传统光电类传感器的智能化改造是智能制造发展过程中衍生出来的一个新研究方向,传统光电类传感器和处理器芯片以及算法相互结合的方式能够有效地提高光电类传感器的各项性能,更好地适应实际应用中不断提高的要求。基于该发展趋势,本文提出了一种环境自适应灰度循迹传感器的设计和实现方案,该新型传感器能够提高灰度传感器的稳定性,提高识别结果的准确性。此外,传统灰度传感器也可设计成模拟量输出加上其他识别算法的方案,识别结果的精度更高。