倾斜摄影测量在港口中的应用及精度分析
2022-03-07亢保军
王 頔,亢保军,王 朝
(中交第一航务工程勘察设计院有限公司,天津300222)
近年来,应用无人机开展的倾斜摄影测量技术越来越多地应用于各行业的勘测工作中,其所生成的实景三维模型在工程建设中得到广泛应用。曹宁等[1]使用八旋翼无人机搭载五镜头相机进行数据采集、建模处理,并使用CASS软件绘制数字线画图,开展平面精度统计,总结该技术的各类使用场景;张凯等[2]提出精准测绘的概念,以精准航线规划为目的自主开发飞控软件,提出环绕、水平“之”字形、贴地式飞行等方法,实现倾斜三维模型自动化侧面数据采集;刘旭[3]分析了倾斜摄影测量的技术原理,并采用大疆M600Pro无人机挂载苍穹KQ-CAM5倾斜摄影相机进行拍摄,并阐述数据采集、数据处理、生成模型、精度统计、生产效益分析等方面的具体工作;覃俊等[4]以古建筑实景三维模型为基础,基于B/S架构,提出一套WebGIS的古建筑保护规划审批辅助决策系统,实现古建筑的综合展示、统计分析及空间分析功能,建立了古建筑数字化档案;李丹[5]将倾斜摄影测量技术应用于铁路工程中,探讨在铁路行业特色的长条形区域作业模式下如何优化像控点布设方案,如何在保障模型精度的前提下减少像片控制点数量,从而降低外业工作量。
倾斜摄影测量技术也逐渐应用于港口行业,但港口中不规则区域如三面临水的条带状区域(防波堤、码头等)由于离岸较远延伸入海,长宽比超过100倍,难以采集合格数据通过空中三角测量进行建模,存在港口中进行三维实景建模的技术难点。笔者采用多旋翼无人机,搭载五镜头倾斜相机,依托港口工程实践,对港口行业应用倾斜摄影测量技术提出更为合理的方案。
1 倾斜摄影测量工作流程
无人机倾斜摄影测量项目一般根据工作地点的不同划分为外业数据采集与内业数据处理2个阶段。其中,外业数据采集包括资料搜集、测区踏勘、技术方案设计、像控点与检核点的布设和采集、飞行作业影像数据采集、数据检查等内容;内业数据处理包括数据整理、导入建模软件、控制点刺点、空中三角测量、模型构建、精度检核及精细化修模等内容(图1)。外业的技术方案设计与内业的空中三角测量工作直接关系到生成的实景三维模型的位置精度及模型的精细程度。

图1 倾斜摄影测量技术流程
2 倾斜摄影测量技术的工程应用
2.1 测区概况
测量区域大体呈东南—西北向条带状延伸,长边约6.5 km,短边平均长度约1.6 km,总面积约8 km2,由东南向西北依次为防波堤、建成区、吹填区、池塘区域,测区三面涉水。
2.2 外业数据采集
前期搜集到当地国家2 000控制点信息,经过RTK平面定位精度检核及高程水准测量精度检核后采用。航拍前,根据测区内地形地貌实际情况及边界走向,考虑无人机航拍效率及工作站处理能力,将整个测区分为27个区块(图2)。综合考虑本次测量区域相关地形地貌情况和现行规范要求,选取地面明显标志点(如斑马线、道路线等易判别标志)和地面绘制标志点相结合的方式间隔约300 m在测区中均匀布设像片控制点,选择GNSS RTK测量方式实地采集各像片控制点的平面坐标以及高程值。

图2 区块划分
每次飞行作业前根据测区地貌及当天的飞行区域寻找地形开阔、无遮挡、车辆较少的位置作为起飞地点,确保飞机状态正常。根据前期设计方案开展数据采集工作,设置无人机沿航线方向飞行,飞行高度120 m,地面分辨率2.1 cm,飞行速度8.5 m/s,航向重叠率80%,旁向重叠率83%。在数据采集过程中须实时监控无人机的飞行参数,包括姿态、飞行高度、风速、剩余电量、照片数量等,保障无人机飞行安全。飞行后下载航拍照片及飞行POS文件,并检查数据是否齐全、完好。
2.3 空中三角测量
将外业采集数据进行整理与重命名,确保照片的唯一标识及与POS数据的一一对应关系。将照片数据、POS及像片控制点导入Smart3D软件,首先使用原始POS数据做刚体变换开展初步空三计算,提取特征点数据,进行同名点匹配,开展迭代平差、畸变矫正从而获取外方位元素。然后根据初步空三成果进行像片控制点刺点工作,所有像片控制点刺点完成后,再次开展平差计算,平差解算完成后查看空三报告,若有平面和高程中误差较大的像控点则调整刺点位置再次进行控制点平差计算,直至空三结果正确并且精度满足规范要求。
2.4 精度检核
通过完成空中三角测量的数据进行模型构建,根据工作站内存情况生成适合大小的瓦片,生成OSGB格式实景三维模型,见图3a)。为检核实景三维模型的精度,在整个工程范围内较为均匀地布设164个检核点,采用GNSS RTK测量方式实地测量各点平面坐标和高程值。将采集得到的检核点整理导入《无人机低空摄影测量辅助处理系统》软件,并导入项目生成的OSGB格式实景三维模型,在实景三维模型中刺出对应检核点位置,最后将在实景三维模型上进行刺点的检核点坐标与实测检核点坐标进行对比,剔除由于车辆或移动设备遮挡难以刺点的检核点。本项目共完成检核点刺点156个,实景三维模型建模精度如下:X方向中误差为±0.035 m,Y方向中误差为±0.040 m,高程误差为±0.031 m,均优于2个像元大小(地面分辨率2.1 cm)。由统计结果可知,构建的实景三维模型平面及高程精度均满足《城市测量规范》中“平坦地区1:500地形图地物点相对于临近控制点的点位中误差不大于±25.0 cm及高程中误差不大于±15.0 cm”的要求。故本项目完成的实景三维成果精度完全满足后续港口平台建设及工程建设等的多重需求,亦可作为后续生成数字正射影像(DOM)、数字地表模型(DSM)的基础数据成果使用,见图3b)、c)。

图3 实景三维模型
2.5 精细化修模
由于项目测区为港区,三面临海,且测区内存在弱纹理地区(吹填区、池塘区)、条带状区域(进港道路、防波堤),故所生成的实景三维模型中存在水面破损、道路拉花、防风网破损、收费站下方扭曲等现象,影响模型完整性及美观度,需要进行精细化修模。对于需要开展精细化修模的实景三维模型,将其导入DP-Modeler修模软件,针对破损防风网、墙体等情况进行单体化建模,针对破损水面进行水面平整和修复,针对道路移动车辆问题进行压平设置后贴图修改,针对漂浮物进行删除。原始三维实景模型与精细化修模后的模型对比效果如图4所示。
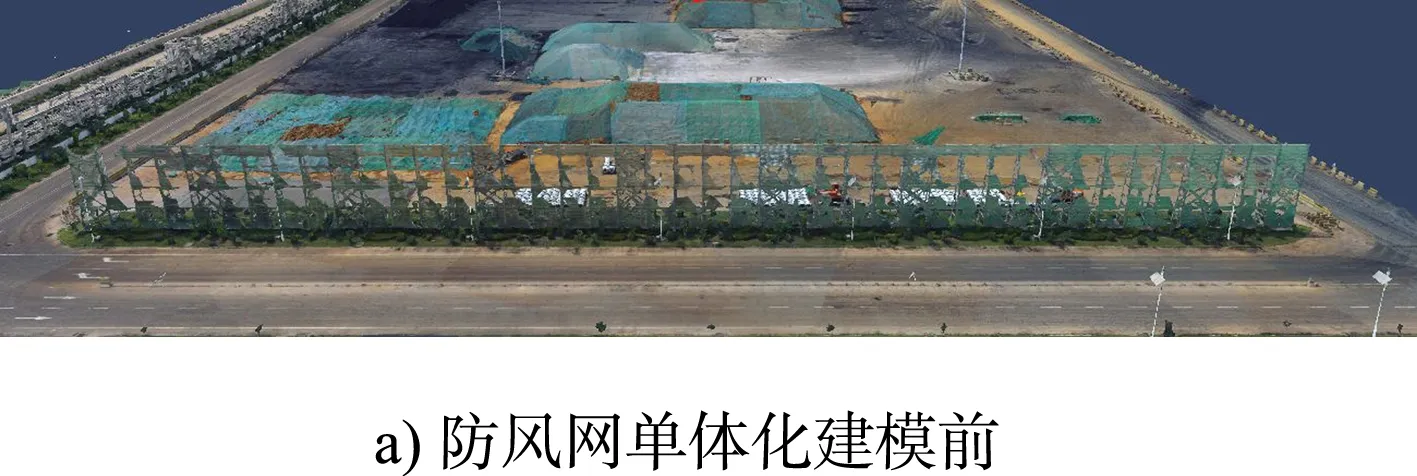
图4 原始三维实景模型与精细化修模后的模型对比
3 结语
1)倾斜摄影测量技术应用于港口中已经趋于成熟,本项目的技术方案可适用于建立港口高精细程度、高位置精度的实景三维模型。
2)技术方案设计部分,对于水体覆盖较多的区域,建议垂直于长边飞行,如不具备条件平行于长边飞行,则建议提高旁向重叠率;针对延伸入海的条带状地形,建议降低飞行高度,减少单张照片的水体覆盖度;形状不规则的测区建议在拐点处成对布设像控点,增加连接点,提高空中三角测量计算精度。
3)空中三角测量部分,在区块划分时,若延伸入海面积较大,建议与相连陆地区块合并处理,提高空中三角测量成功率;针对长宽比超过100的长条形区域,建议分块进行空中三角测量。
4)精细化修模部分,若存在高大建筑或收费站等有遮挡地区,建议使用手机或无人机在地面对于可能存在的遮挡地物进行拍照,以提高后期修模效率及模型精细程度。
5)随着国家对于数字城市、智慧城市以及数字中国的建设和投入逐渐加大,构建三维立体模式下的智慧港口建设势在必行,未来以实景三维模型为基础背景叠加地上、地下各类三维模型(如三维地形模型、三维地质模型、三维管线模型、BIM模型等)以及各类专题数据(如地物属性信息、交通数据、设备数据、船舶停靠按信息等)将依托于三维GIS平台,以可视化、空间分析、精准管理为特点应用在港口的规划、设计、施工、运维等诸多方面的场景中,提供各种类型的数据支持服务。
