海上漂浮式风机动态响应敏感性参数分析
2022-03-06董晔弘
李 辉,张 凯,董晔弘
(中国船舶集团海装风电股份有限公司研究院,北京 100097)
随着海上风电开发的推进,风电场将由近海走向远海,但水深的增加对风机基础提出了更高的要求。如果深远海依然采用固定式风机,整个风电场的成本将随着水深的增加急剧上升,这使得深海风电场建设在经济上变得不可行,而将风电机组安装在漂浮式平台上则可以很好地解决这一问题。
全球已经有Hywind Scotland与WindFloat Atlantic项目完成了漂浮式风电场建设,并有多种型式海上浮式风电研究项目在研发和测试中,证明了漂浮式风机技术可行性[1-2]。近年来不少学者对漂浮式风机涉及的关键技术展开了诸多研究[3-4],但在设计参数对漂浮式风机动态响应影响规律上少有分析。漂浮式风机承受载荷复杂,设计参数很多,相同的设计方案在不同的设计参数下动态响应差别很大,这将影响整个装备的安全性与经济性,因此研究漂浮式风机对哪些设计参数变化比较敏感十分具有意义。
本文以中国海装6.2 MW漂浮式风机参数,针对风浪流载荷单独作用、风浪夹角、仿真时间和种子数量以及极端空转偏航误差角几个参数进行了敏感性分析,研究各参数对整体动态响应的影响程度,从而为漂浮式风机设计提供参考。
1 分析方法
漂浮式风机同时遭受风浪流载荷,气动载荷与水动载荷非线性耦合十分明显,加上控制系统,整个结构动力特性十分复杂,因此必须进行一体化仿真分析结果才相对准确。而影响漂浮式风机动态响应的参数很多,选择哪些参数进行敏感性分析十分关键。
1.1 一体化仿真方法
Deeplines Wind软件中气动载荷计算为AeroDeep模块,其核心计算原理为叶素动量理论[5]。但为保证非定常湍流风作用下载荷计算精确性同时,需增加叶尖损失修正、动态尾流与失速修正以及塔影效应修正。由于浮式风电平台属于大尺度构件,频域水动力分析需采用三维辐射/绕射方法。由于势流理论没有考虑粘性,所以粘性部分通过调用单独的Morison模型进行。
系泊系统动力学模型是准确预报漂浮式风机动态响应的关键。目前,系泊模型的求解包括静力和动力求解,其中静力求解一般采用准静态方法,动力求解包括集中质量法和细长杆等方法,Deeplines Wind软件采用的方法为集中质量法。塔架风载荷和平台风载荷的计算相对简单,主要采用经验公式方法进行计算,但要考虑风速剖面和海流剖面。
通过上述各部分求解,即可以得到初始状态的风浪流载荷,然后在Deeplines Wind中进行时域耦合计算。在时域计算中需嵌入风电机组控制系统,基本控制策略为额定风速以下,保持桨距角不变,调整叶轮转速和转矩,使机组达到最大发电功率;达到额定风速以上时,调整桨距角,使机组发电功率保持在额定功率附近。时域分析中漂浮式风机运动方程[6]可以描述为:

(1)
式中:M为结构物广义质量矩阵;m为结构物的附加质量矩阵;K(t-τ)为系统的延迟函数;C为系统的静水恢复力矩阵;F(t)为作用于结构物的广义力矩阵。
Deeplines Wind一体化仿真分析流程如图1所示,由于同时考虑气动载荷、水动载荷、系泊载荷与控制系统的耦合,软件计算时间较长。
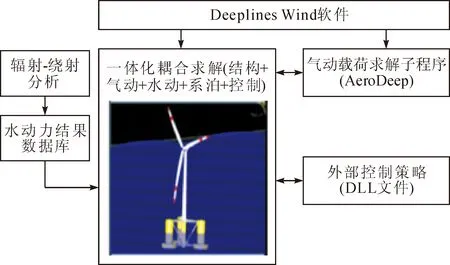
图1 一体化仿真分析流程
1.2 敏感性分析方法
对于已经确定总体设计方案的漂浮式风机,机组参数、基础与系泊参数将不会轻易变化,而最容易变化的参数就是环境条件和分析参数。
漂浮式风机属于海洋工程结构和风电机组的组合结构,按照规范要求,传统海洋工程结构物时域分析为3 h,随机种子数量一般为3个,而风电机组载荷时域计算常规时间为10 min,随机种子数量为6个[7]。二者差别较大,不同的仿真时间和种子数将会对仿真结果产生较大影响。在极端空转工况,由于风机脱网,偏航系统会出现断电不能实时对风的状态,此时机组风载荷将会变大。规范建议在仿真中设置不同的偏航误差角度,而不同的误差角对整体响应的影响会有不同。
漂浮式风机同时遭受风浪流载荷,不同机组状态和工况时,风浪流单独作用对整体产生的影响会有所不同,分析不同工况载荷的主要贡献,将会对整个风机的安全和设计优化具有重要意义。实际风浪并不一定总是同向,不同的风浪夹角时,漂浮式风机动态响应将会有所不同,按照规范的建议和设计经验,风浪夹角一般取0-90deg。因此本文选择不同仿真时间和种子数、风浪流单独作用、风浪夹角以及极端偏航误差角四个参数进行敏感性分析。
漂浮式风机动态响应分析结果很多,本文根据结果的重要性和代表性,选择了整体六自由度运动响应、锚链有效张力、塔底载荷、轮毂载荷以及机舱加速度进行敏感性分析。漂浮式风机一体化仿真分析的工况非常多,动态响应结果与机组发电状态、初始受力状态以及环境条件组合方式等直接相关,本文根据漂浮式风机自身的特点和规范建议的典型状态[8],挑选了代表性工况进行敏感性参数分析。综上所述,本文进行漂浮式风机动态响应敏感性参数分析的流程如图2所示。
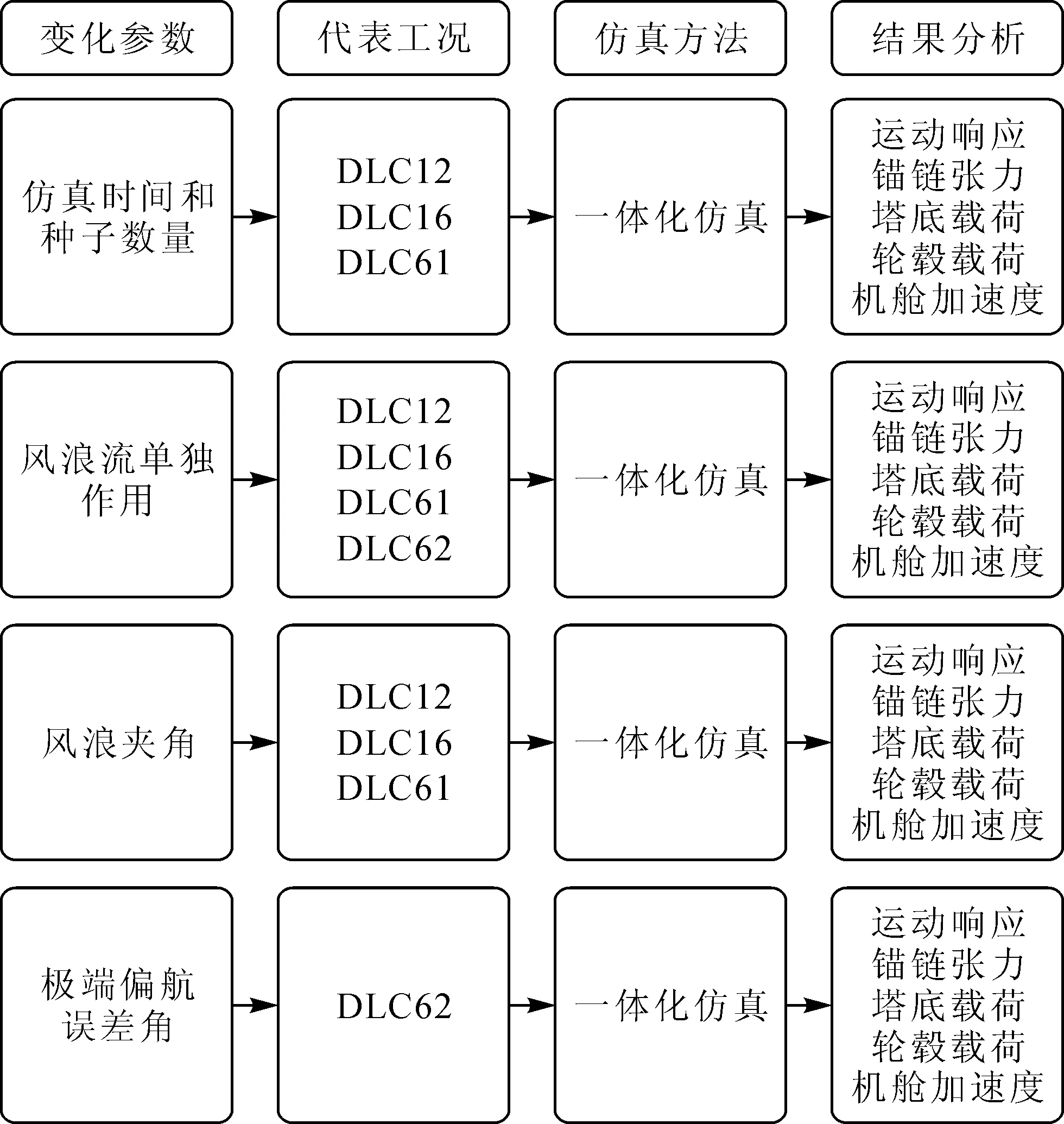
图2 敏感性分析流程
2 算例参数
本文基于海装漂浮式风机项目参数,建立整个漂浮式风机一体化仿真模型,下面分别给出各部分基本参数[9]。
2.1 机组参数
本漂浮式风电机组主要参数见表1。
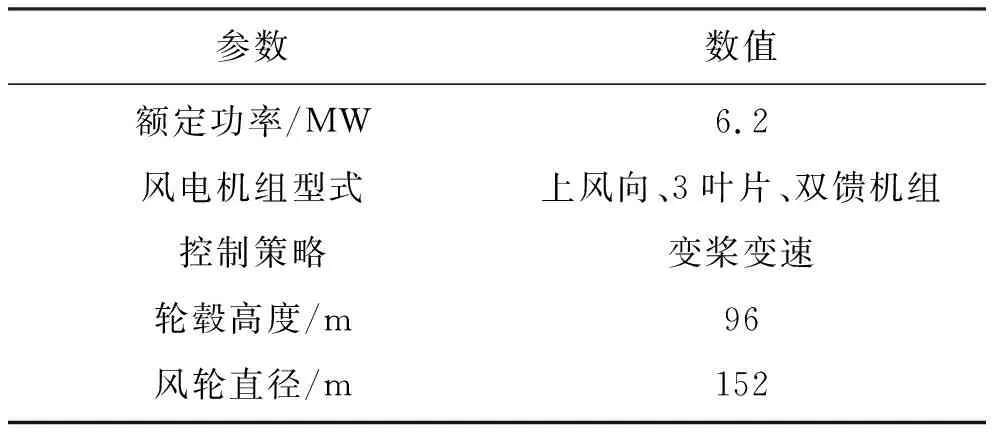
表1 风电机组主要参数
2.2 平台参数
本漂浮式风机平台主要参数见表2。

表2 半潜型漂浮式平台主要参数
2.3 系泊参数
根据项目总体方案,本漂浮式风机系泊系统为悬链线式,主要参数见表3,锚链布置如图3所示。
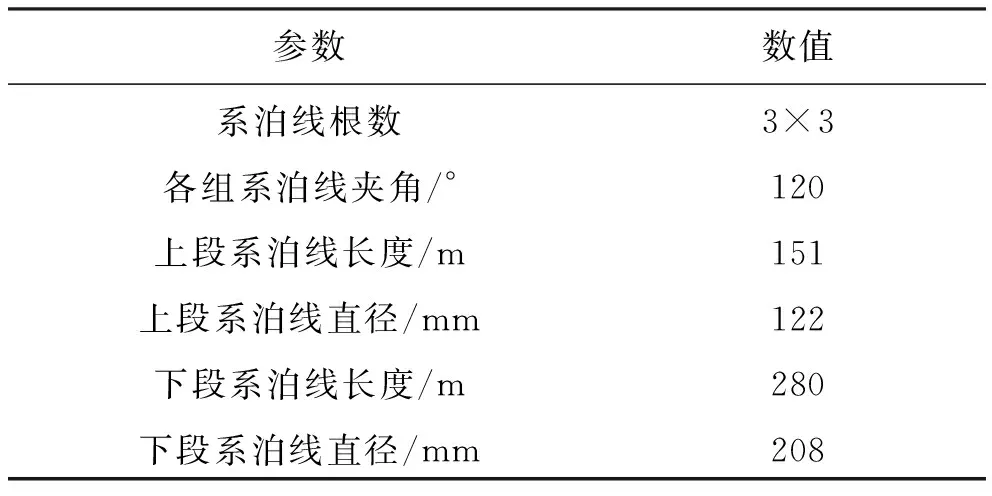
表3 系泊系统参数

图3 锚链布置
2.4 工况参数
根据设计参数,本文选择的代表性工况参数见表4,基于上述参数建立的一体化仿真模型如图4所示。
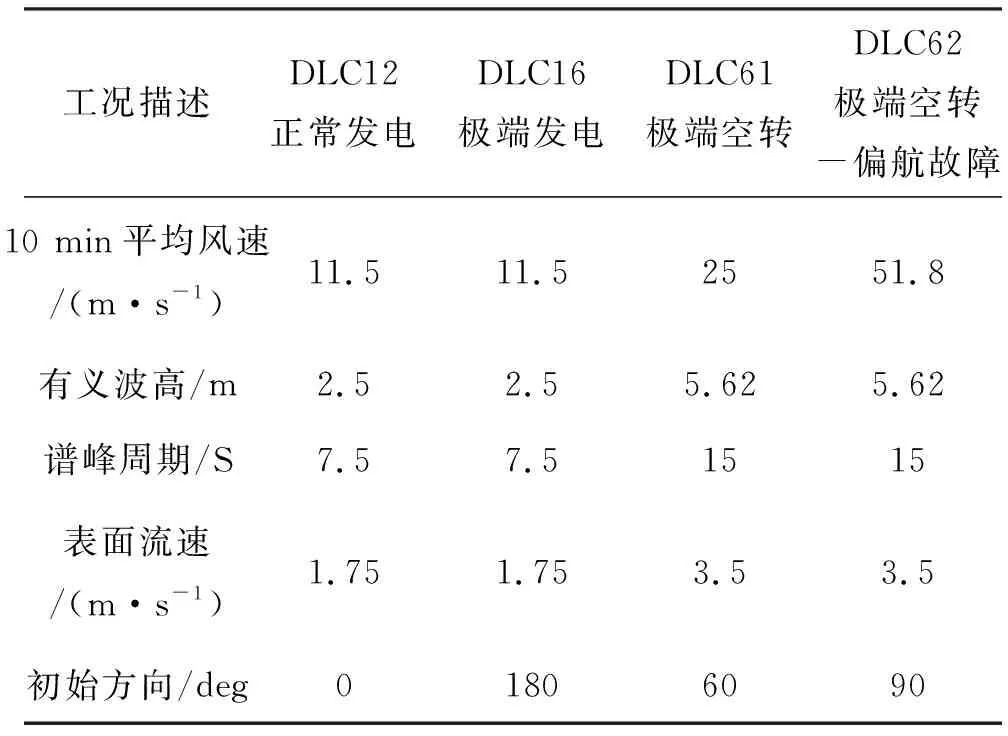
表4 敏感性分析工况参数
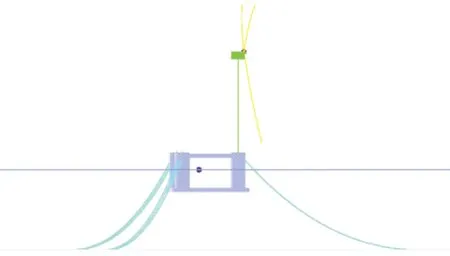
图4 一体化仿真模型
3 敏感性参数分析
根据目标海域环境条件和总体设计方案,分析不同仿真时间和种子数量、风浪流载荷单独作用、风浪夹角、极端偏航误差角对漂浮式风机动态响应的影响,有利于判别整个装备的危险状态、寻找设计优化的方向以及载荷变化的规律。
3.1 仿真时间和种子数
根据以往设计经验和规范推荐,一体化仿真总时间分别选择10 min、1 h和3 h,根据各工况仿真时间换算出来10 min仿真种子数量分别为1/6/12/18,1 h仿真种子数量分别为1/3/6,3 h仿真种子数量分别为1/2。后处理中选择可以反应各部分动态响应的计算结果来研究变化规律,主要包括平台6自由度运动、锚链张力、塔底载荷、轮毂载荷以及机舱加速度,具体计算结果如表5所示。
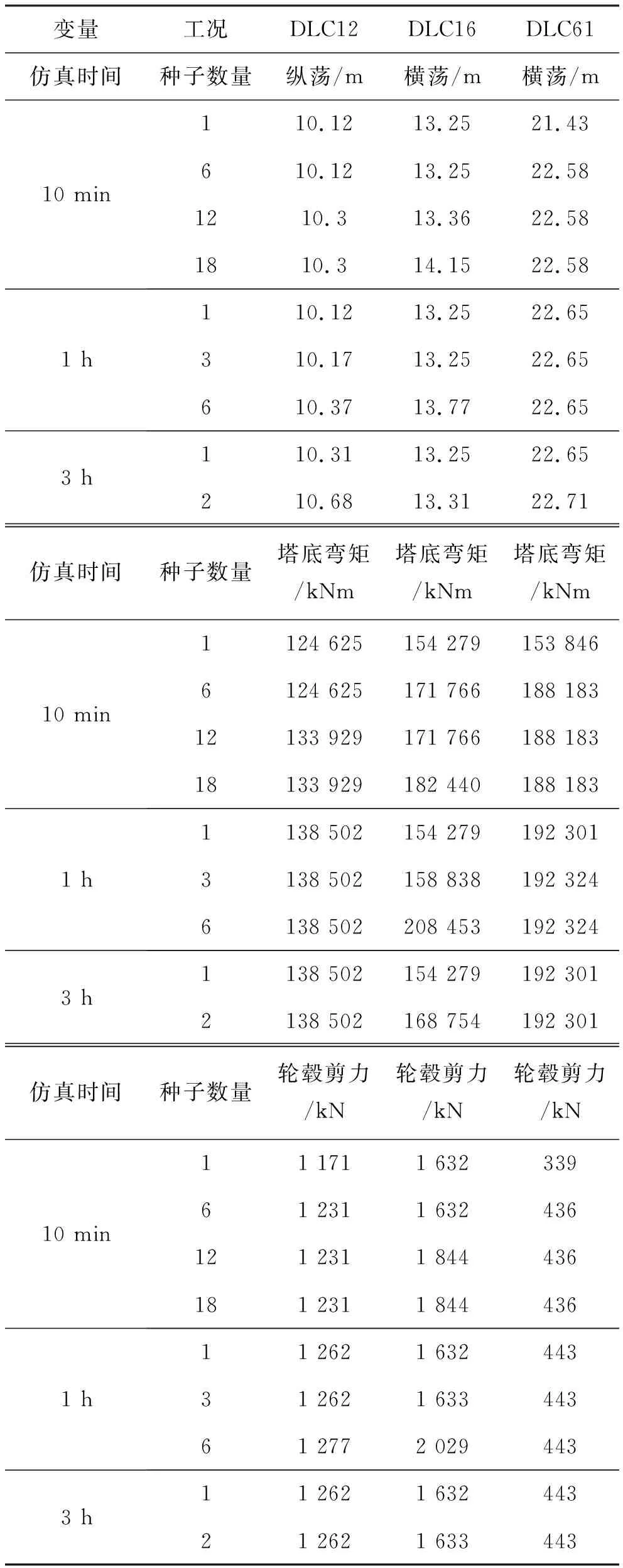
表5 不同仿真时间和种子数量计算结果
根据计算结果,分别以1 h仿真时间结果和6个种子数量结果为参考基准值进行相对误差分析,最大相对误差值分布分别如图5和图6所示。可以看出,发电工况仿真时间主要影响机组载荷结果,最大相对误差接近20%,其中1 h和3 h载荷结果更为接近。空转工况由于风机顺桨,浪流载荷变大,整体动态响应受仿真时间影响明显增大,其中1 h和3 h仿真结果相差不大,因此漂浮式风机采用1 h的仿真时间可以满足基本设计要求。而10 min仿真时间采用不同种子数量的影响最大,最大误差超过30%,整体动态响应结果当种子数量达到12个时结果相对准确。1 h仿真时间,种子数量达到3个时结果相对准确,3 h仿真时间单个种子结果可以包络10 min和1 h多种子数量的结果。
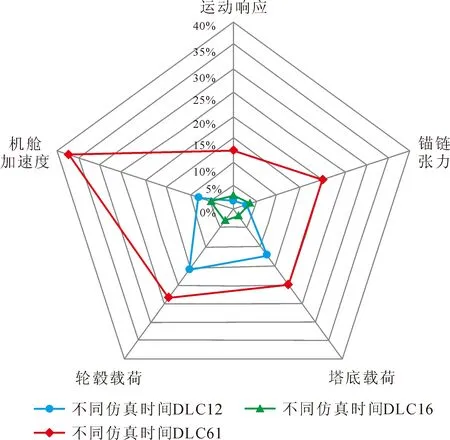
图5 不同仿真时间最大相对误差分布
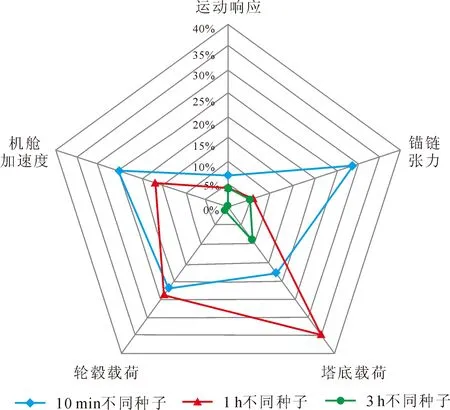
图6 不同种子数最大相对误差分布
综合来看,漂浮式风机受仿真时间和种子数影响比较明显,极端发电工况和极端空转工况环境条件恶劣,采用1 h仿真时间和3个种子数量会比较可靠。而正常发电工况,单工况可以采用10 min仿真时间,但种子数量至少要12个,仿真结果会相对可靠。
3.2 风浪流载荷单独作用
为了评估风浪流载荷对整个风电装备作用效果,分别使用单纯风、单纯浪、单纯流以及风浪流工况进行一体化仿真分析,代表计算结果如图7、图8所示。
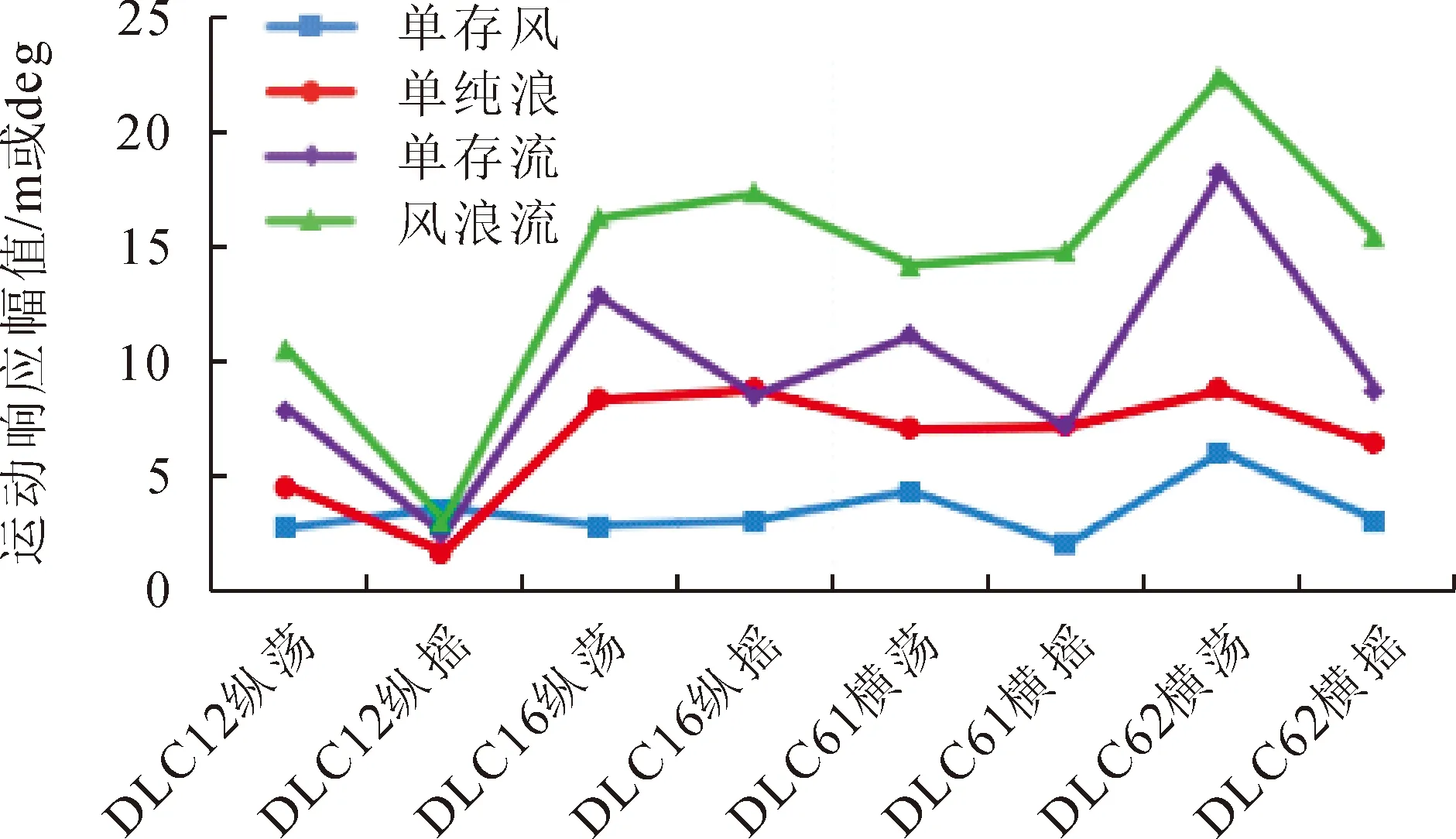
图7 运动响应分析结果
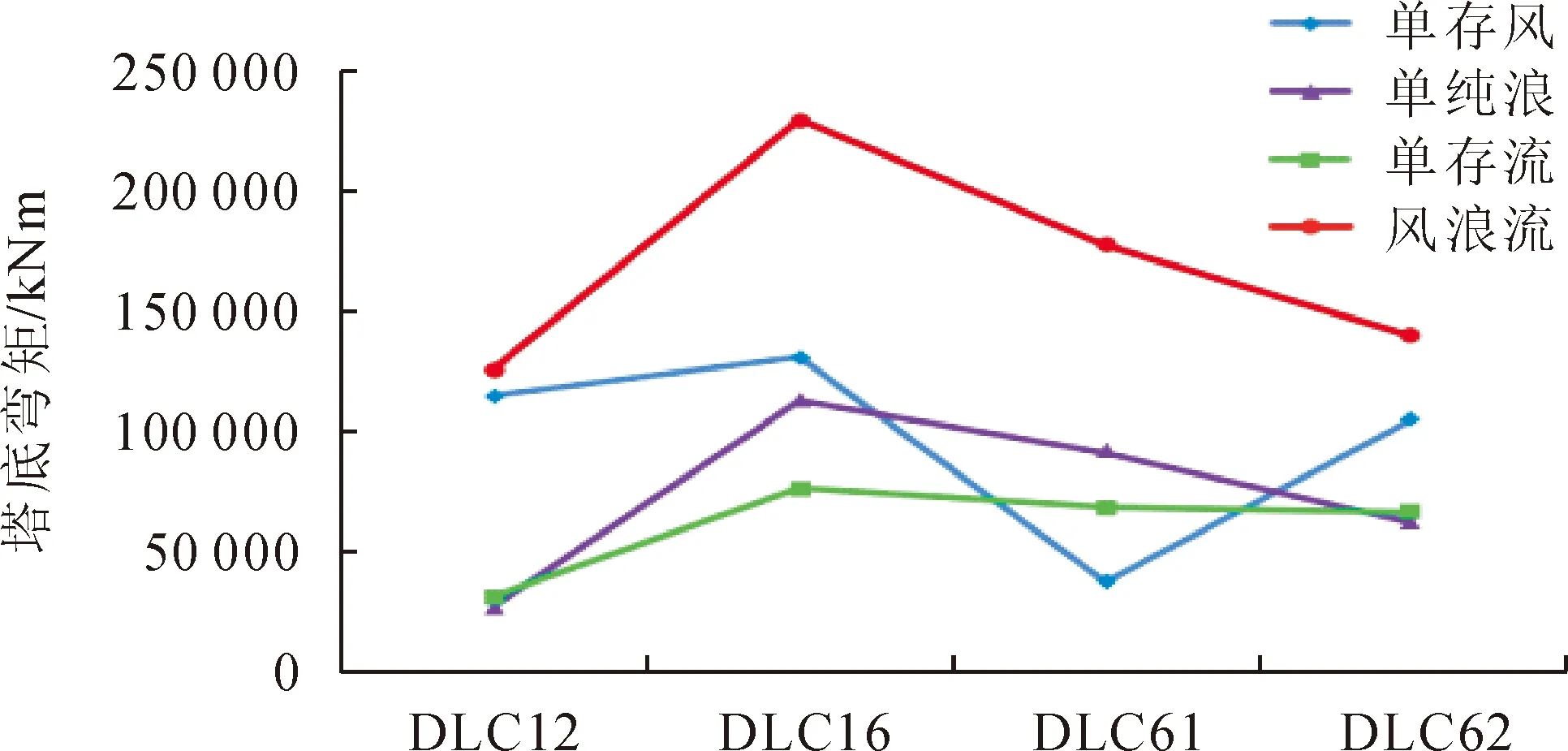
图8 塔底载荷分析结果
根据计算结果,以风浪流组合工况为参考基准值进行相对误差分析,最大相对误差值分布如图9所示。可以看出运动响应和锚链张力受风载荷的影响较小,主要以浪流作用为主,最大偏差接近90%,波浪主要影响幅值,海流影响均值。发电工况塔底载荷和机舱加速度主要以风载荷为主,浪流载荷响应次之。极端空转工况塔底载荷和机舱加速度同时受风浪流载荷影响,最大相对误差接近80%。无论是发电工况还是极端空转工况,轮毂载荷都是以风载荷作用为主,波浪和海流对轮毂载荷影响不大。
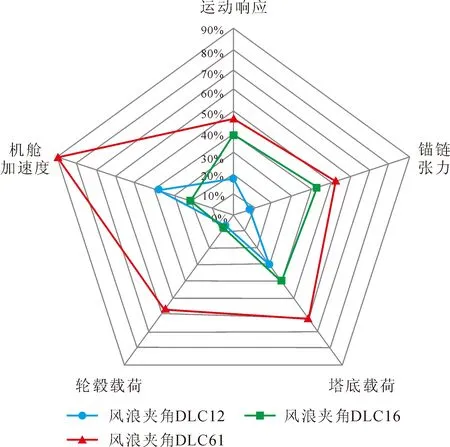
图9 风浪流组合工况最大相对误差分布
3.3 风浪夹角
为了分析不同的风浪夹角对整体动态响应影响,选择风浪夹角分别为0/15/30/60/90 deg进行仿真分析,代表计算结果如图10、图11所示。
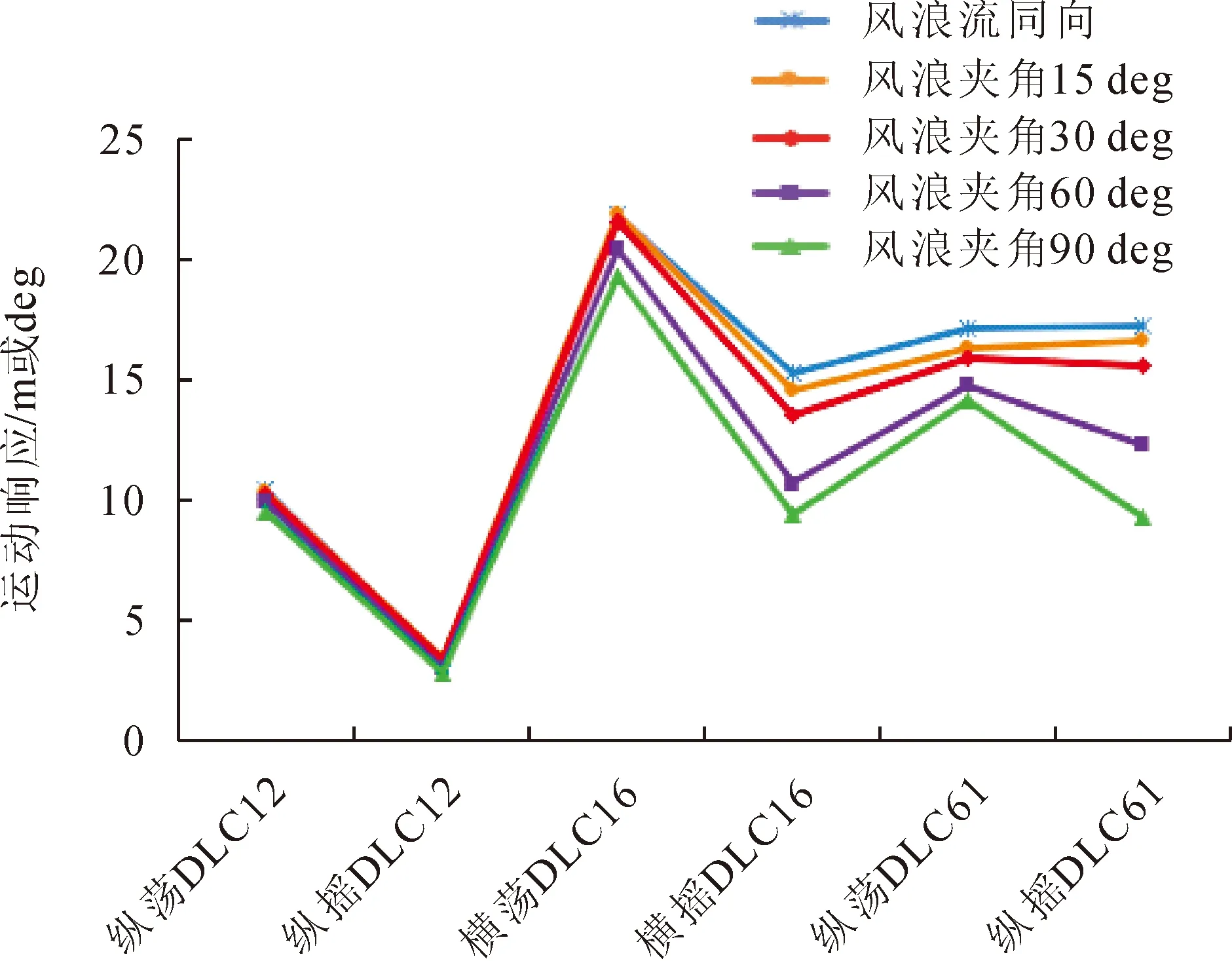
图10 运动响应分析结果
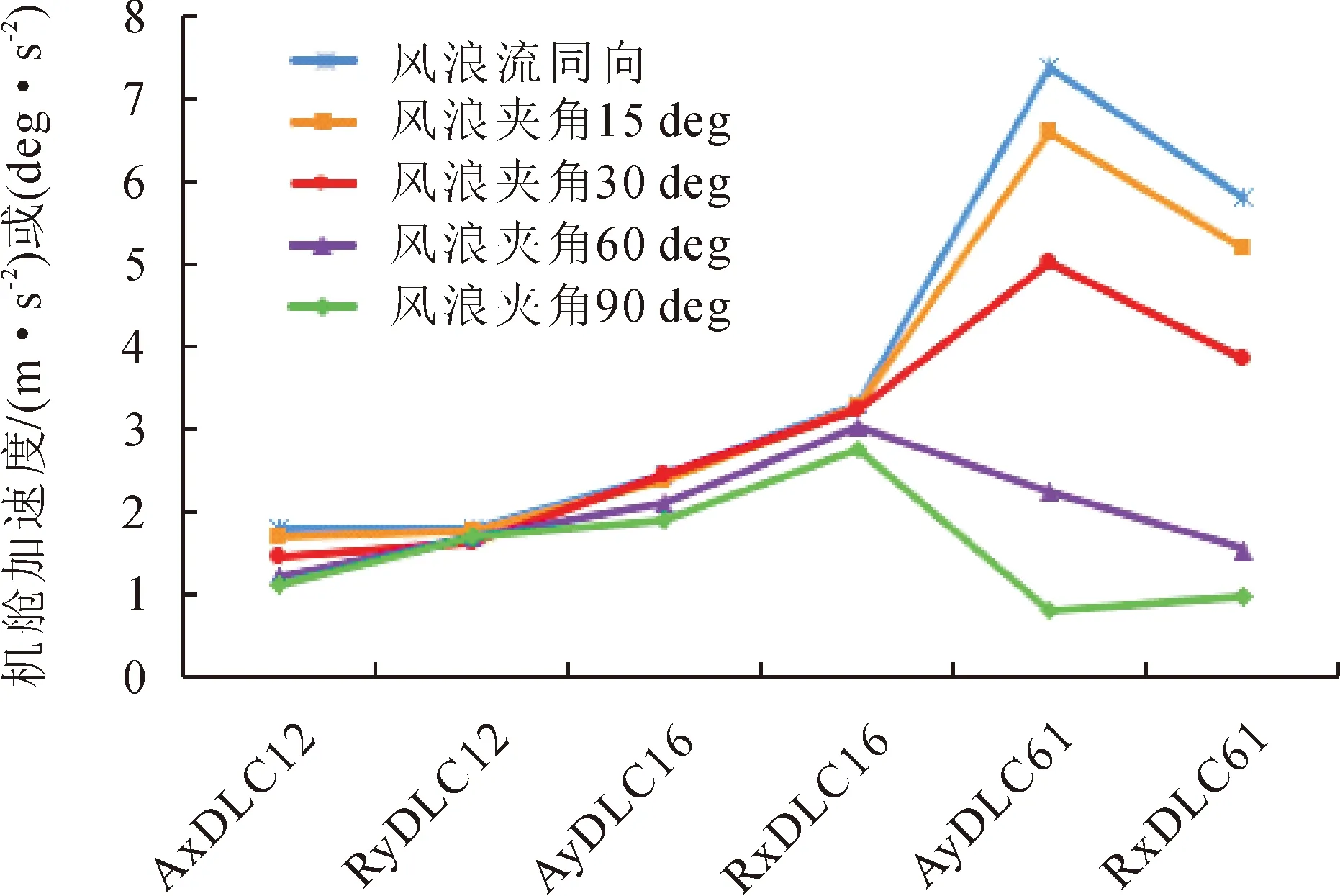
图11 机舱加速度分析结果
根据计算结果,以风浪流同向为参考基准值进行相对误差分析,最大相对误差值分布如图12所示。可以看出发电工况风浪夹角对机组极值载荷影响不大,但对运动响应和锚链张力影响较大,最大误差可以达到40%。空转工况风浪夹角对整个装备动态响应均有较大影响,最大机组载荷可以达到90%。随着风浪夹角增大,极值载荷有所减小,说明风浪有夹角时产生的载荷有所抵消。但不管是发电工况还是空转工况,风浪流同向时漂浮式风机动态响应最大。
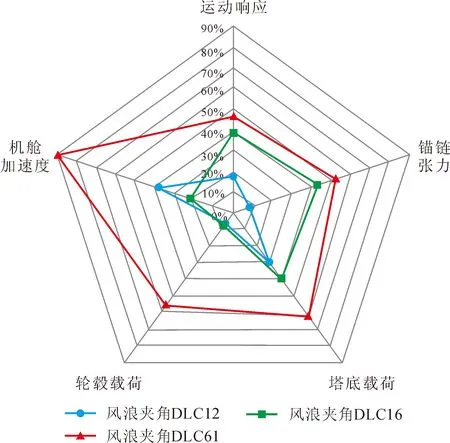
图12 风浪流同向最大相对误差分布
3.4 极端偏航误差角
极端空转状态,偏航系统断电时会产生较大偏航误差角,从而影响整个漂浮式风机受力状态。根据以往经验和规范要求,选择代表性0/90/180/270 deg误差角进行一体化仿真分析,主要结果如图13、图14所示。
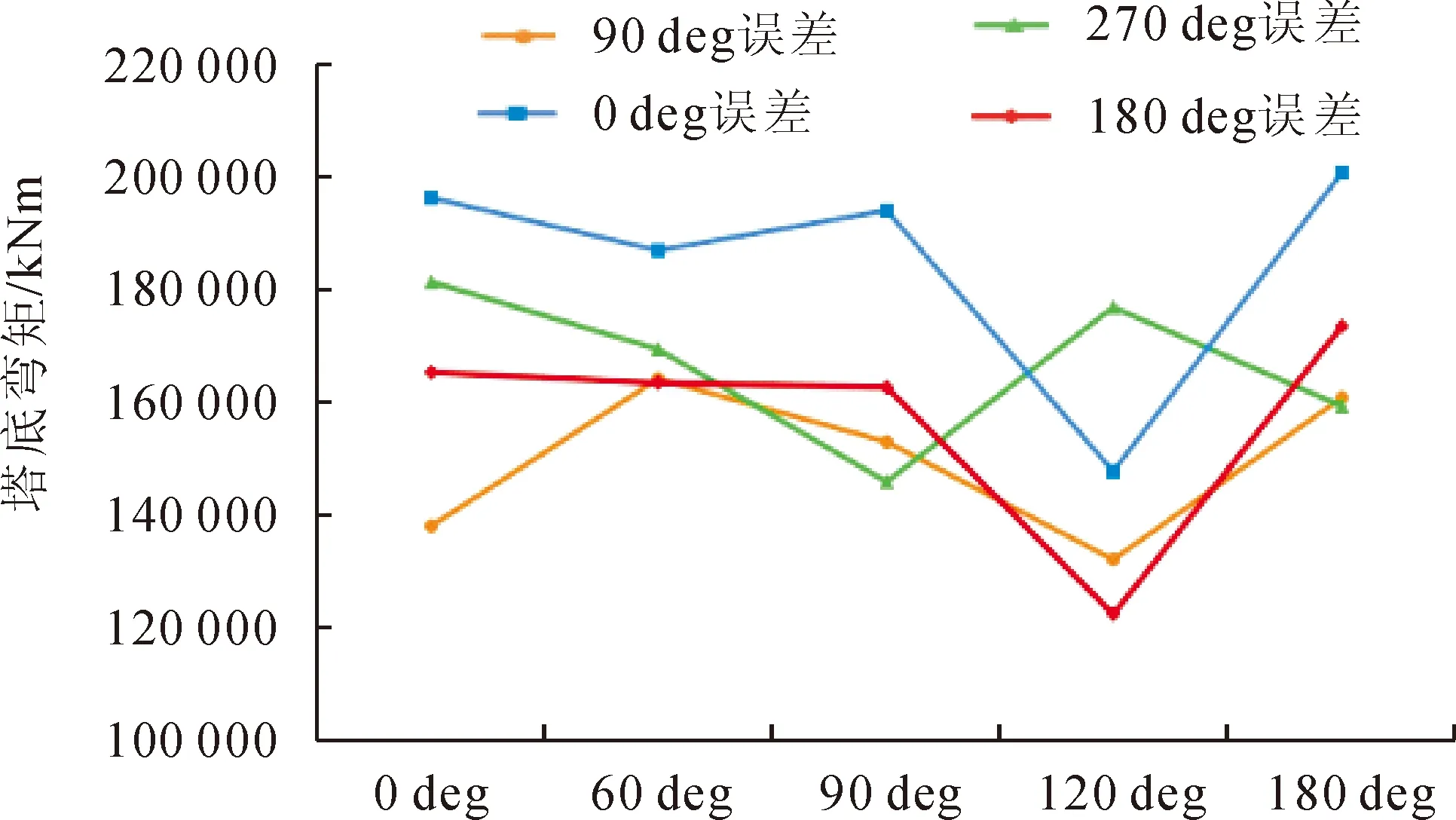
图13 塔底载荷分析结果
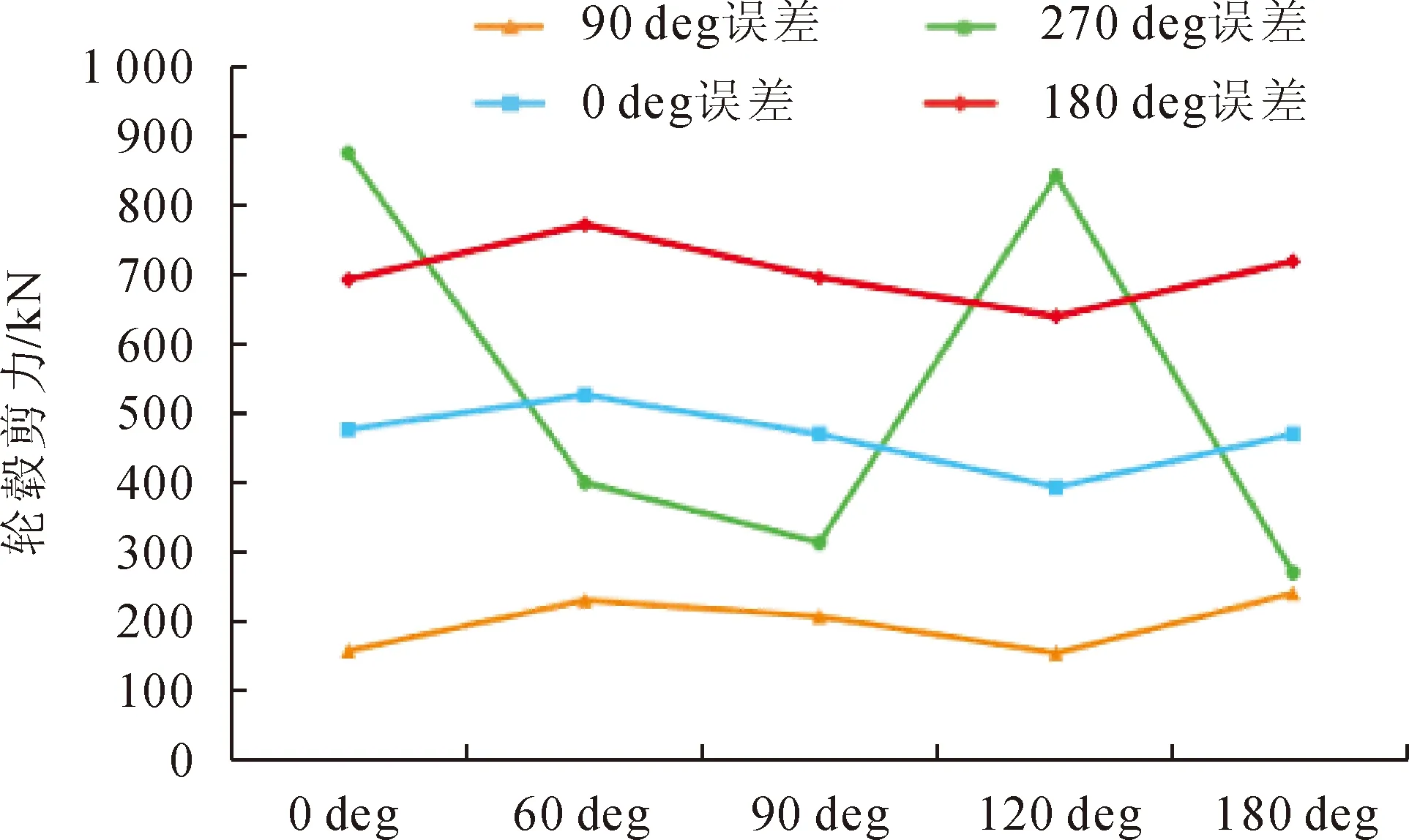
图14 轮毂载荷分析结果
根据计算结果,以0 deg误差角结果为参考基准值进行相对误差分析,最大相对误差值分布如图15所示。可以看出,极端偏航角误差对整体运动响应和锚链最大张力的影响较小,误差值都在10%以内。但随着偏航误差角的变化,塔底载荷、机舱加速度和轮毂载荷变化较多,尤其是90 deg和270 deg偏航误差角,载荷最大相对误差达到200%,说明偏航角误差对机组载荷影响很大,因此在极端空转工况保证机组能实时对风是必要的。
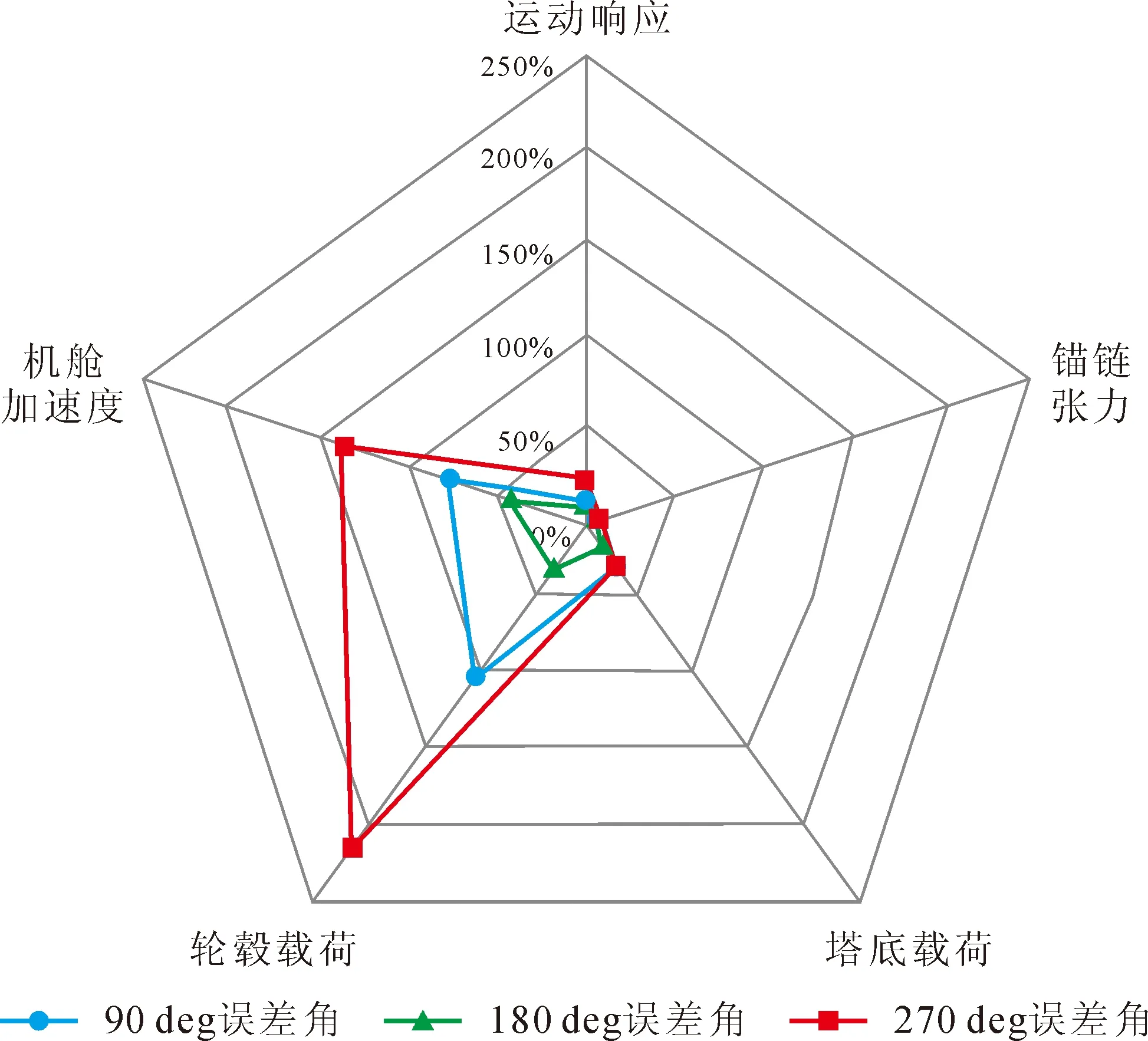
图15 最大相对误差分布
4 结 语
本文针对不同仿真时间和种子数量、风浪流载荷单独作用、风浪夹角以及极端偏航误差角几个变量进行了敏感性参数分析,得到以下结论:
1)仿真时间和种子数量对漂浮式风机动态响应影响较大,正常发电工况可以使用10 min仿真,但种子数要至少12个;极端发电和极端空转工况,环境条件恶劣,采用1h仿真和3个种子数结果会更准确。表明漂浮式风机非线性耦合更强,需要结合整个装备方案选择合理的仿真时间和种子数量,才能保证仿真结果的准确性。
2)运动响应和锚链张力幅值主要受浪流作用,发电工况塔底载荷和机舱加速度主要以风载荷为主,极端空转工况塔底载荷和机舱加速度同时受风浪流载荷影响。因此在已知环境条件时,可根据风浪流作用效果,对基础性能进行比较。
3)发电工况风浪夹角主要影响运动响应和锚链张力,最大相对误差可以达到40%。空转工况风浪夹角对整个装备动态响应均有较大影响,随着风浪夹角增大,极值载荷有所减小,说明风浪有夹角时产生的载荷有所抵消。因此根据已知环境条件分布,合理布置浮式风机位置,结合控制策略,对降低整体响应,提高使用寿命十分有用。
4)极端偏航误差角对平台运动和锚链张力影响不大,但对机组载荷影响明显,尤其是90°和270°误差角,因此漂浮式风机须配置备用柴油发电机给偏航系统供电,以保证在风机脱网时机组仍能实时对风。
本文计算结果只是针对海装6.2 MW机组和半潜型漂浮式风电平台以及悬链线式系泊的计算结果,但对其它浮式风电项目设计具有一定的参考意义。当采用不同的机组型式、平台类型和系泊系统时,在批量仿真之前建议进行敏感性参数分析,这对仿真工况定义、风电装备安全性评估、方案选型和优化十分必要。
