一种结合稀疏重建和匹配滤波的距离模糊抑制方法
2022-03-05黄丽佳仇晓兰张问一胡玉新初庆伟
齐 萌 黄丽佳* 仇晓兰 张问一 胡玉新 初庆伟
①(中国科学院空天信息创新研究院 北京 100094)
②(中国科学院空间信息处理与应用系统技术重点实验室 北京 100190)
③(中国科学院大学电子电气与通信工程学院 北京 100049)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)系统天线剖面形状一般类似于sinc函数。虽然SAR系统接收窗口是按照天线主瓣方向设置的,实际接收到的信号中不仅包含天线主瓣内的信号,也不可避免会包含来自天线旁瓣的信号。当旁瓣照射区域的回波延迟与主瓣照射区域的回波延迟相差N个脉冲重复间隔时,来自之前第N次或者之后第N次脉冲的旁瓣回波会与当前脉冲的主瓣回波同时到达天线,从而获得的主瓣图像上会叠加旁瓣模糊像的影响。在机载情况下,斜距较小,距离第一模糊区和主像区域角度间隔非常大,距离模糊通常不显著。在星载情况下,斜距较大,距离第一模糊区和主像区域角度间隔很小,距离模糊成为影响图像质量的因素之一[1]。
解决距离模糊问题主要有两类方法。第一类从雷达系统设计角度减少距离模糊能量的接收,如仰角零间距技术[2]、方位角编码技术[3]、正负调频技术[4]等。除了正负调频技术外,其他技术尚未被已发射的星载SAR系统采用。另一类从信号处理角度对已经进入接收窗口的距离模糊信号进行分离和抑制,包括基于正负调频技术的距离模糊抑制算法[5,6]、基于稀疏正则化的距离模糊抑制算法[7]。
采用正负调频技术,雷达交替发射正调频信号和负调频信号,来自第一模糊区的回波信号与来自主瓣区域的回波信号具有相反的调频斜率,因此主像聚焦过程会引起模糊区散焦,从而实现距离模糊抑制。温雪娇等人[5]针对正负调频技术提出了一种新的距离模糊抑制方法,通过近似构造模糊区匹配滤波器获得距离第一模糊区聚焦和主像散焦的叠加图像,通过恒虚警检测(Constant False Alarm Rate,CFAR)得到模糊区强散射点再通过逆匹配滤波器得到模糊区回波信号的估计值,从而实现模糊区和主瓣回波信号的分离。该方法依赖正负调频体制,难以拓展到固定调频率体制,否则模糊区成像时主像也会部分聚焦,CFAR检测难以对二者进行分离。此外,该方法采用近似距离多普勒(Range Doppler,RD)算法进行模糊区成像,模糊区聚焦不完全,影响了CFAR对模糊区的检测能力。
采用压缩感知(Compressive Sensing,CS)技术[8],建立以正则化算法为代表的稀疏重建算法,可以替代经典的SAR匹配滤波成像技术,获取SAR成像结果。稀疏重建算法可以显著降低采样率要求,并且具有降低旁瓣、抑制模糊等诸多性能优势[9]。文献[10]提出了面向稀疏重建图像质量提升的方位采样参数优化方法。文献[11]建立了包含模糊像参数的观测矩阵,将稀疏重建应用于距离模糊抑制。文献[12]和文献[13]利用大量实际星载SAR数据验证了稀疏重建算法的性能和特点,稀疏重建算法具有很好的距离模糊抑制和噪声抑制能力。基于l1正则化的稀疏重建通常是对观测场景的有偏估计,虽然能够获取更高分辨率图像,但对弱目标会造成一定程度的辐射失真,无法像经典匹配滤波算法一样保持图像的统计特性和细节信息[14]。稀疏重建作为一种非线性算法,其计算量远远大于经典匹配滤波算法,并且随着场景尺寸的增加而急剧增加。实际应用中,通常需要采用各种策略对稀疏重建算法进行加速[15]。
本文提出了一种结合稀疏重建和匹配滤波的距离模糊抑制方法。该方法利用稀疏重建提高了距离模糊估计和抑制的有效性,利用匹配滤波提高了成像处理效率和弱目标的细节保持能力。相对于直接利用稀疏重建算法同时获取主像和模糊像,本文方法只需要对部分距离模糊能量较强的区域进行稀疏重建,并且只需要采用很低的稀疏度对少数强目标点进行稀疏重建,计算量大幅降低。相对于利用匹配滤波算法估计和抑制距离模糊像,本文方法显著拓展了距离模糊抑制适用性、提高了距离模糊抑制的精确性。
本文第2节回顾了稀疏重建方法。第3节推导了距离模糊稀疏重建模型,给出了结合稀疏重建和匹配滤波的算法流程。第4节开展了点目标和面目标的距离模糊抑制仿真实验。第5节对全文进行了总结。
2 基于稀疏重建的SAR信号处理
SAR稀疏重建是通过观测矩阵,将地面观测场景后向散射系数映射为SAR系统接收信号,观测矩阵与雷达系统参数和成像几何密切相关。
一维观测矩阵可写为
其中,φm,n表示第n个目标处、第m个离散采样点的回波信号。
SAR系统接收信号可以表示为[14]

其中,y是回波信号离散采样后组成的观测列向量;x是观测场景后向散射系数空间离散化后组成的列向量;Nnoise为回波中的加性噪声。
对于一般SAR观测场景,x不是稀疏的,但如果其在某一个变换域Ψ是稀疏的,x=Ψα,α具有稀疏性。则式(2)可以写为

其中,Ψ为稀疏变换基(大小为N×N)。α为x在稀疏变换基上的系数,也是x的稀疏表示(大小为N ×1) 。通过设计合理的Θ矩阵满足有限等距性质(Restricted Isometry Property,RIP),其大小为M ×N(M ≪N)。此时,α到观测量y的映射是唯一的。
SAR场景包含多样性复杂特征,很难找到一个通用的稀疏表示方法[16]。稀疏字典表示、结构化稀疏表示等方法被应用于ISAR稀疏重建[17],在此基础上基于点线面的混合稀疏表示也被应用于SAR稀疏重建[18,19]。
实际星载SAR图像中,距离模糊一般出现在海面、沙漠、草原等分布式弱目标区域,对主像产生影响的模糊信号主要来自模糊区强点/类点目标,因此本文稀疏重建的前提是满足场景稀疏条件。
SAR稀疏重建的观测矩阵一般可以满足精确重建(RIP条件)的前提[20],信号的重建就可以通过式(4)实现:

其中,Θ∈RM×N也称作恢复矩阵,‖·‖0为l0范数,表示α中非零元素的个数。
重建x也就是求解α的最小l0范数。求解α中非零元素个数的最小值K,也就是保留了尽量少的K个重要分量近似精确地重建x。匹配追踪算法(Matching Pursuit,MP)是最小l0范数求解的一种经典算法[21]。
前人工作证明[22],可以将求解l0范数转换为求解l1范数:

其中,‖·‖1为l1范数。通过求解最小l1范数的凸优化问题可以简化计算过程。基追踪算法(Basis Pursuit,BP)是求解最小l1范数的凸优化问题的一种经典算法,每次迭代都是从矩阵Θ中寻找最优的列向量。
3 基于模糊区稀疏重建的距离模糊抑制
3.1 距离模糊区计算
星载SAR系统采用脉冲工作体制,天线主瓣和旁瓣在地面上的实际照射区域远大于测绘带宽。接收机在接收主瓣回波信号的同时,也会接收到前序和后续脉冲的旁瓣回波信号,从而形成距离模糊图像,对观测区域的主像造成干扰。
利用X波段、HH极化、亚米级分辨率图像,基于成像处理和辐射校正后的SLC数据,表1统计了山区、海面(含岛屿和船只)、港口、城区4类典型场景后向散射系数(σ0)变化范围,包括最大值和平均值范围、最大值和最小值范围。可见,不同地物后向散射系数差异可以达到几十分贝。距离发射和接收双程方向图合成后,第一旁瓣峰值相对于主瓣峰值相差—20 dB,第二旁瓣峰值相对于主瓣峰值差异可以达到—40 dB甚至更大,距离模糊抑制一般主要考虑第一模糊区。
表1 典型场景后向散射系数变化范围Tab.1 Variation range of backscattering coefficients in typical scenes
基于模糊区稀疏重建的距离模糊抑制算法首先需要计算距离模糊区:(1)根据雷达接收窗口计算成像区域内每一个像素点的中心斜距Rc|i,j,i表示距离像素点、j表示方位像素点;(2)根据卫星平台三轴位置、三轴姿态、天线波束指向计算每一个像素点的多普勒中心频率fdc|i,j以及天线增益Aml|i,j;(3)根据斜距 (Rc|i,j+c/2)/PRF、多普勒中心频率fdc|i,j构造距离多普勒方程和地球模型方程,可以定位对像素点i,j形成干扰的远距端模糊区目标点,计算其在天线方向图中的距离视角和方位斜视角,进而计算其天线增益表示光速、PRF(Pulse Repetition Frequency)表示脉冲重复频率;(4)根据斜距 (Rc|i,j -c/2)/PRF、多普勒中心频率fdc|i,j构造距离多普勒方程和地球模型方程,可以定位对像素点i,j形成干扰的近距端模糊区目标点,计算其在天线方向图中的距离视角和方位斜视角,进而计算其天线增益;(5)逐个像素点计算与Aml|i,j之差,按照一定模糊能量门限对距离模糊区像素点进行筛选(一般可以按照是否属于第一旁瓣进行筛选),进一步减小待重建的距离模糊区范围。
3.2 距离模糊信号估计
稀疏重建算法具有欠采样成像处理能力。在满采样情况下,可以对主瓣和旁瓣观测区构造统一的观测矩阵,从而实现主像和模糊像的重建与分离,进而实现距离模糊抑制的目的[12]。然而,稀疏重建算法的复杂度和观测矩阵的规模呈平方关系,算法计算量和耗时随着观测场景尺寸的增加而大幅增加。星载SAR测绘带宽和分辨率等成像性能越来越高,观测矩阵的规模变得十分巨大,稀疏重建算法很难支持星载SAR地面系统实际应用。
经典匹配滤波算法可以针对距离模糊区设置匹配滤波器参数并获得模糊区图像,此时主像信号以散焦形式与模糊区图像叠加在一起,通过CFAR检测可以近似实现模糊区强目标信号分离[5]。经典匹配滤波对正负调频体制适应性较好,由于主像和模糊像调频率符号相反,模糊像聚焦而主像严重散焦。对于固定调频体制,主像信号距离向完全聚焦、方位部分聚焦,主像强目标能量给CFAR检测带来困难,难以对主像和模糊像进行有效分离。
本文综合稀疏重建算法的精确性和匹配滤波算法的高效性,提出了一种结合稀疏重建和匹配滤波的距离模糊抑制方法。本方法首先利用匹配滤波完成距离压缩和距离徙动校正,然后对每一个距离门内的方位信号利用稀疏重建获取模糊区强点目标图像及其模糊信号,在去除模糊信号后再利用匹配滤波算法获取主像图像。相对于匹配滤波算法去除距离模糊,在图像稀疏假设条件下,本方法可以有效分离主像和模糊像,提升距离模糊抑制能力。
回波信号由主像回波信号和模糊区回波信号共同构成,如式(6):

其中,SMI表 示主像回波信号,SBI表示模糊区回波信号,Nnoise表 示噪声信号,SE表示总的回波信号。
对于米级分辨率星载SAR,主像及其模糊像的距离徙动差异一般小于0.5倍分辨率:X波段SAR卫星(如TerraSAR-X),分辨率不超过1 m;C波段SAR卫星(如高分三号),分辨率不超过1.8 m。对于高分辨率和大斜视条件下会有跨距离门情况出现,需要在二维回波进行构造矩阵,本文方法不适用。经过距离压缩、距离徙动校正后,主像及其模糊像可以表示为方位一维信号,多普勒域表达式如式(7):
其中,fη表 示方位频率轴,Rc和fdc分别表示成像中心时刻(参考零时刻)的斜距和多普勒中心频率,λ表示雷达波长,σ表示目标后向散射截面积,Wa(·) 表示多普勒域幅频包络,Vr表示等效速度。
主像区域内,同一个距离门内的目标点形成的目标向量XMI表示如下:

其中,XMI由N个目标点组成,σn,MI表示XMI中第n个目标点的后向散射截面积。
目标向量XMI在近距端和远距端第一距离模糊区内,对应于目标向量XBI=-1和XBI=+1,简写为XBI-和XBI+,表示如下:

式(9)和式(10)中,XBI-和XBI+由N个目标点组成,σn,BI-和σn,BI+分 别表示XBI-和XBI+中 第n个目标点的后向散射截面积。
针对主像区目标向量XMI构造观测矩阵ΦMI,表达式与式(1)一致,根据式(7)给出观测矩阵中元素φm,n,MI:
其中,fη|m表示方位频率轴的第m个采样点,m=1,2,...,M;ηc|n表 示目标向量XMI中第n个目标的波束中心照射时刻,n=1,2,...,N。
针对模糊区目标向量XBI-和XBI+分别构造观测矩阵ΦBI-和ΦBI+,表达式与式(1)一致,观测矩阵中元素φm,n,BI-和φm,n,BI+分别为
因此,式(6)包含主像区和模糊区的回波信号可进一步表示为

进一步将式(14)转化为

其中,Φ表示由主像区观测矩阵和模糊区观测矩阵共同组成的观测矩阵,X表示由主像区目标点和模糊区目标点组成的目标向量。
对于式(15)所示模型,主像区目标点和模糊区目标点二者具有空间稀疏性分布时,通过求解X的最小l0范 数,得到X的 估计值:

其中,‖‖0和‖‖2分别表示取向量的0范数和2范数,ε ≥0是由加性噪声强度决定的参量。
如已获取图像产品,模糊像主要出现在主像强度比较弱的区域(如海面场景等分布式弱目标区域),并且模糊像具有空间稀疏性分布时,上述模糊像稀疏重建过程可以进一步简化。重建时不再寻找主像区观测矩阵ΦMI的稀疏解,只需要寻找模糊区观测矩阵ΦBI的稀疏解,此时式(15)可近似表示为

其中,ΦBI表 示总的模糊区观测矩阵,XBI表示总的模糊区目标向量,主像回波信号等效为噪声,对模糊像重建造成一定影响。
对于式(19)所示模型,同样求解XBI的 最小l0范数,得到XBI的 估计值:

利用正交匹配追踪算法(Orthogonal Matching Pursuit,OMP)对最小l0范数进行求解。OMP算法是从观测矩阵中选择一个与信号最匹配的原子(也就是某列),构建一个稀疏逼近,并求出信号残差,然后继续选择与信号残差最匹配的原子。反复迭代,每一次迭代过程中对所挑选的全部原子先要执行 Schmidt正交化操作,来确保每一次循环结果都是最优解,信号可以由这些原子的线性和再加上最后的残差值来表示。
模糊区稀疏重建时,与模糊区观测矩阵ΦBI对应的模糊像聚焦、主像散焦。因此,模糊区稀疏重建优先选择K个最集中的稀疏解,而不是散焦解,从而将模糊像从回波信号中重建出来。
模糊像重建估计结果为

基于稀疏重建得到模糊像回波信号SBI的估计结果为

将模糊像回波信号从获取到的总的回波信号减去,得到主像回波信号SMI的 估计结果为

3.3 距离模糊抑制计算量分析
直接求解式(18)可以得到主像和模糊像的稀疏重建结果,通过压缩感知理论进行距离模糊抑制的有效性已经得到了验证[12,13]。主像和模糊像稀疏重建时,计算量非常巨大:观测矩阵扩大3倍、待计算目标向量覆盖整个主像区域、稀疏度设置需考虑主像内弱目标。本文提出的方法观测矩阵扩大2倍、仅需要对部分模糊区进行重建、稀疏度设置仅需考虑模糊像内强目标。
下面对两种方法的计算量进行对比分析。为了便于描述,重新定义回波信号中距离和方位采样点数为Nr和Na;观测场景中距离和方位点数为Np和Nq;迭代步数为I。匹配滤波算法计算复杂度表示为CMF=O(NaNrlog(NaNr))。稀疏重建算法计算复杂度表示为 C L1=O(INaNrNpNq)。本文提出的稀疏重建和匹配滤波相结合的算法,计算复杂度表示为 CLMF=O(INaNrNpNq/P),其中P为重建场景占总场景比例,P值的选择是由卫星参数、雷达参数决定的,不是一个固定的数值。对于经典的sinc形状的距离天线方向图剖面,第一旁瓣的宽度大概为主瓣宽度的一半,此时P取值为2。进一步考虑回波接收窗和第一旁瓣回波延迟的对应关系,P取值至少大于2。可见,稀疏重建算法在场景尺度较大、信号尺度较大时,计算量非常大。本文算法通过距离模糊区模糊度计算和筛选、在主像能量较弱时仅重建模糊像等方式,大幅缩小了待重建场景范围,从而降低了计算量。
4 实验仿真
下面利用点目标和实际场景仿真实验,验证本文算法的有效性。表2给出点目标仿真参数。
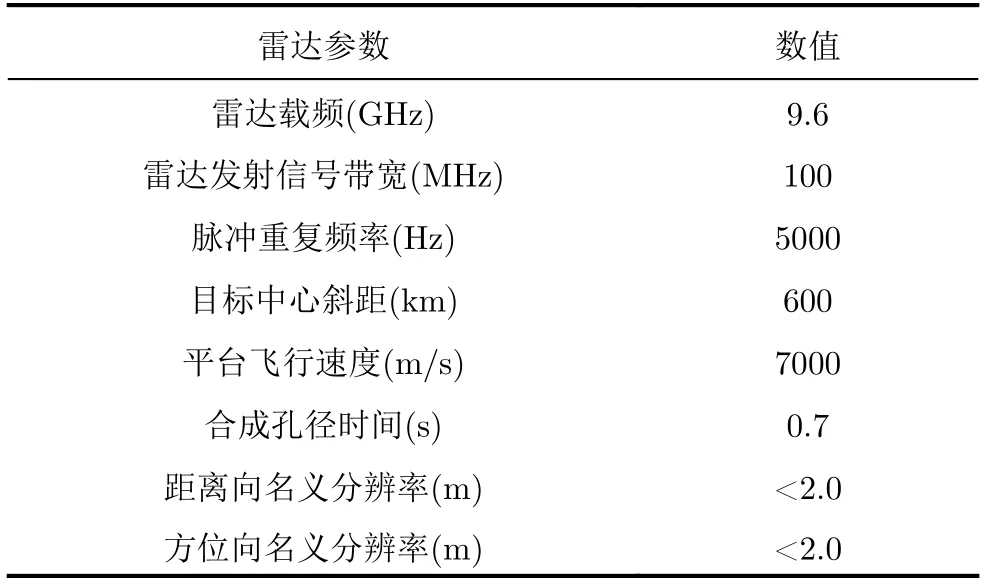
表2 雷达仿真参数Tab.2 Radar simulation parameters
按照点目标模型进行仿真,验证本文方法的距离模糊抑制性能。设置模糊点目标和主像点目标,二者之间的距离-多普勒关系按照3.1节设置,仿真均从SAR二维回波开始仿真。第1种情况,模糊点目标和主像点目标能量比为1:1(模糊点能量/主像点能量0 dB),本文的能量比指的是地物后向散射截面积受到天线方向图调制后的比值,图1给出匹配滤波算法得到的成像结果(匹配滤波算法选用RD算法),图2给出本文方法得到的成像结果(稀疏重建算法选用OMP算法,重建精度较低、运算效率较高)。第2种情况,模糊点目标和主像点目标能量比为100:1(模糊点能量/主像点能量20 dB),图3给出匹配滤波算法得到的成像结果,图4给出本文方法得到的成像结果。
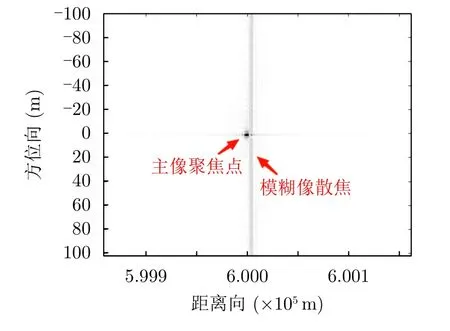
图1 能量比1:1,匹配滤波的主像结果Fig.1 Energy ratio 1:1,primary image results of matching filtering
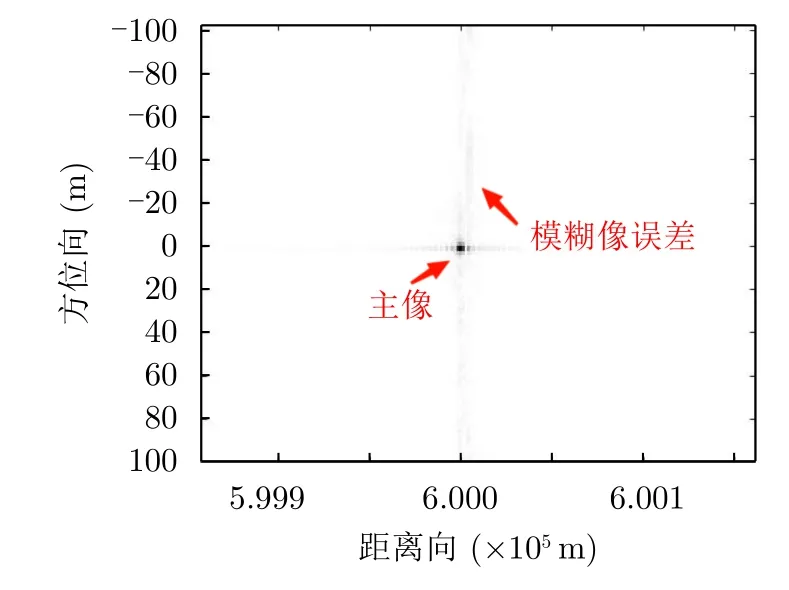
图2 能量比1:1,本文方法的主像结果Fig.2 Energy ratio 1:1,primary image results of the proposed method
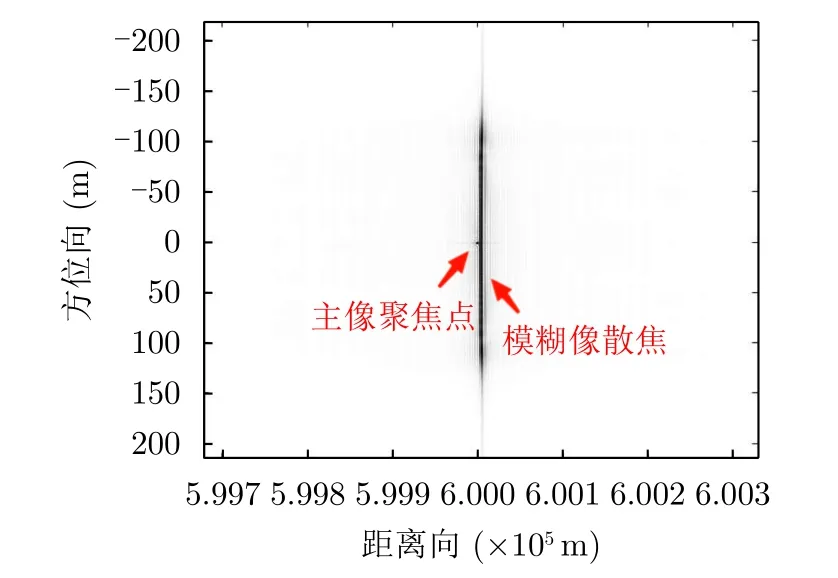
图3 能量比100:1,匹配滤波的主像结果Fig.3 Energy ratio 100:1,primary image results of matching filtering
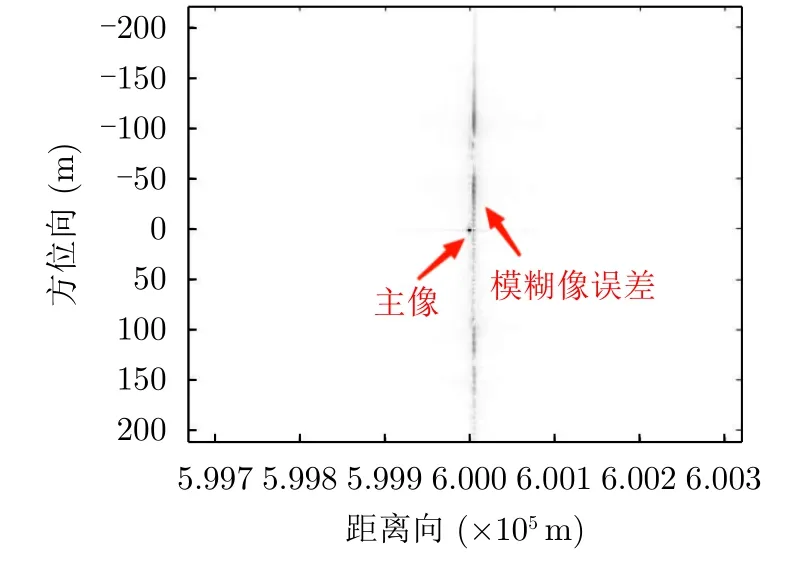
图4 能量比100:1,本文方法的主像结果Fig.4 Energy ratio 100:1,primary image results of the proposed method
表3统计了成像后模糊像和主像能量和之比以及峰值能量之比。可见,匹配滤波算法模糊目标虽然存在散焦,但模糊能量仍然很强,对主像造成的影响目视明显。本文算法有效抑制了模糊能量,在模糊点和主像点能量1:1时,相对于匹配滤波算法进一步抑制了11.9 dB;在模糊点和主像点能量100:1时,相对于匹配滤波算法进一步抑制了11.5 dB。
此外,表3中序号5和6分别给出加入噪声后本文方法对距离模糊抑制的有效性。在模糊点和主像点能量1:1时,回波仿真中加入高斯白噪声,信噪比为—30 dB。本文方法相比于匹配滤波算法对距离模糊进一步抑制了10.7 dB,验证了其在噪声条件下的适用性。
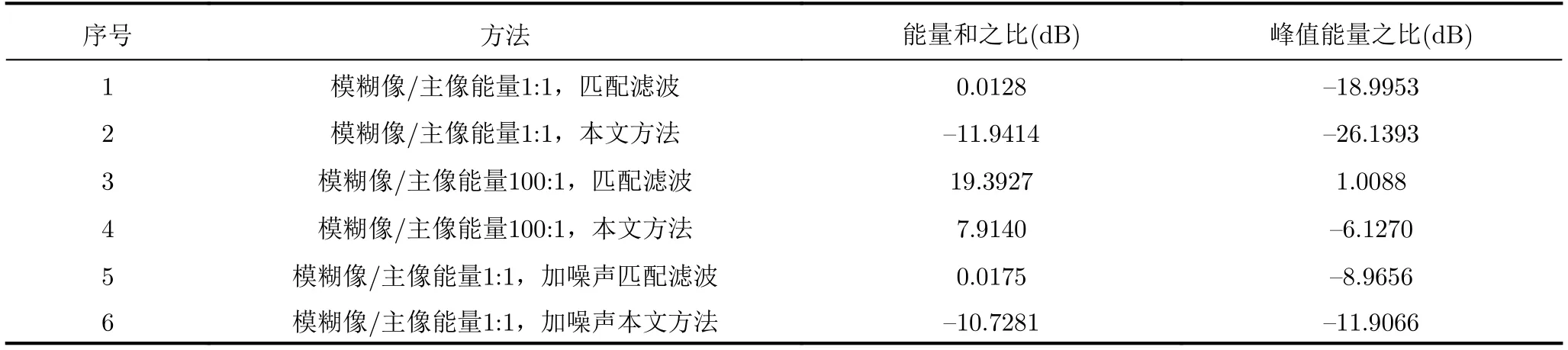
表3 距离模糊抑制前后,模糊像和主像能量比Tab.3 Energy ratio before and after distance fuzzy suppression
按照点目标模型进行仿真,验证主像与模糊像距离徙动差异对距离模糊抑制效果的影响,如图5所示。模糊点目标和主像点目标能量比为1:1,横坐标为合成孔径时间内最大距离徙动差异,纵坐标为本文方法对模糊像/主像能量和之比的改善量。在距离徙动差异小于0.1个分辨单元时,本文方法对距离模糊的抑制可以达到约15 dB;距离徙动差异从0.2个分辨单元扩大到0.7个分辨单元,本文方法对距离模糊的抑制从约10 dB下降到约8 dB。可见,在主像和模糊像距离徙动差异小于0.5个分辨单元时,本文方法仍具有较好的距离模糊抑制能力,随着分辨率的提升和斜视角的增大,距离徙动差异进一步扩大,不再建议使用本文方法。
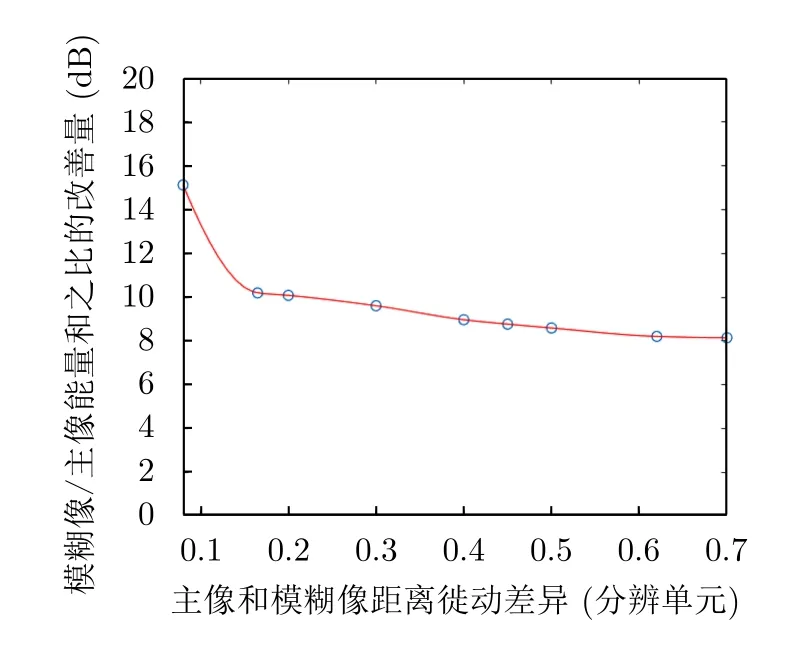
图5 距离徙动差异对距离模糊抑制效果的影响Fig.5 The effect of range migration difference on range ambiguity suppression
按照点目标模型进行仿真,验证本文方法对主像区弱目标能量保持性能。主像区域从近到远设置3个点目标、模糊区设置1个点目标,模糊区点目标与主像中间点目标的距离-多普勒关系按照3.1节设置。主像3个点目标与模糊点目标能量比为25:25:1:25,即主像第3个点目标为弱目标。图6给出匹配滤波算法得到的成像结果,图7给出直接对主像和模糊像进行稀疏重建的结果,图8给出本文方法得到的成像结果。
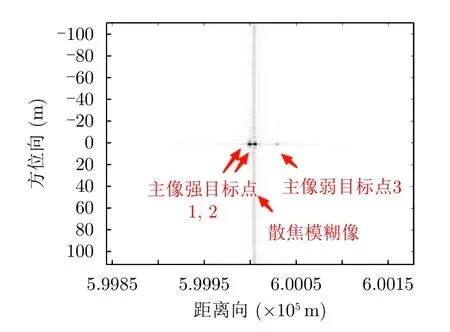
图6 主像区弱目标,匹配滤波的主像结果Fig.6 Weak target in the main image area,primary image results of matching filtering
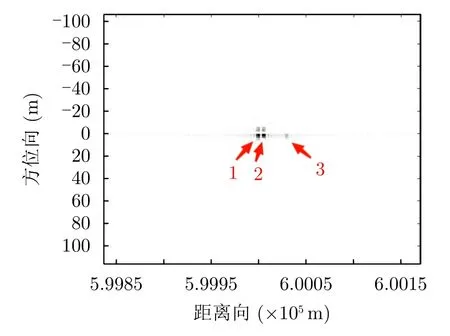
图7 主像区弱目标,经典稀疏重建的主像结果Fig.7 Weak target in the main image area,primary image results of sparse reconstruction
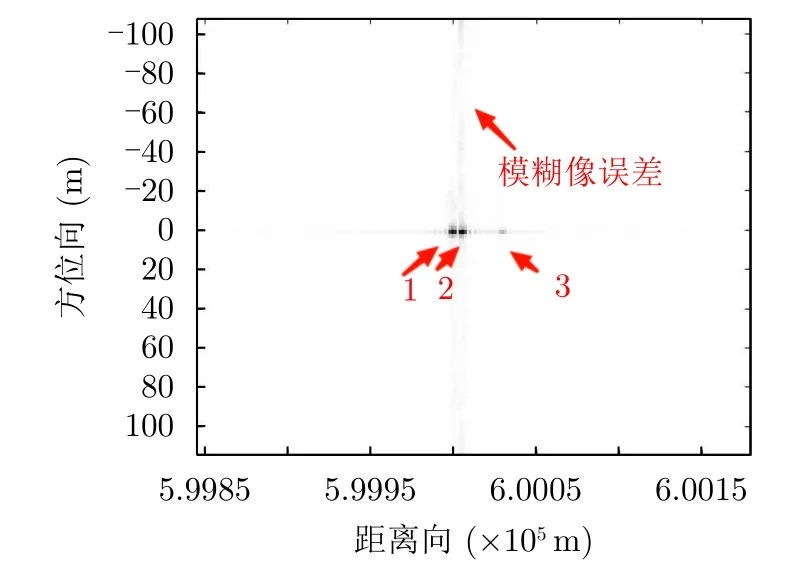
图8 主像区弱目标,本文方法的主像结果Fig.8 Weak target in the main image area,primary image results of the proposed method
表4统计了成像前后弱目标能量变化。可见,采用OMP这一类计算效率较高但精度较低的稀疏重建算法,在距离模糊抑制的同时会对主像区域的弱目标能量产生一定的抑制,造成图像相对辐射失真(27%)和细节损失。本文方法对模糊区目标进行稀疏重建,对主像回波信号影响较小,因此后续采用匹配滤波算法可以较好地保留主像弱目标能量(失真不超过2%)。
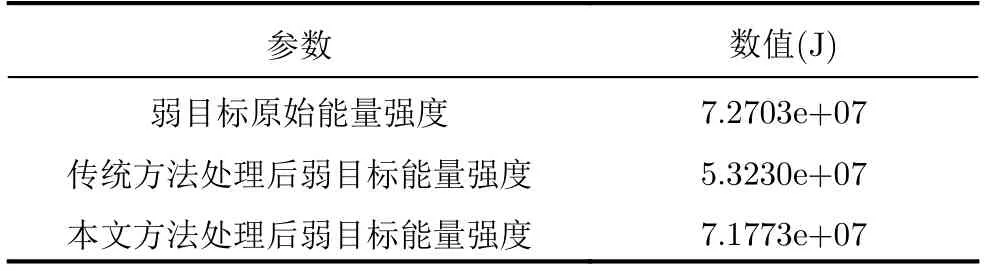
表4 成像前后弱目标能量对比Tab.4 Comparison of weak target energy before and after imaging
按照主像面目标、模糊区点目标模型进行仿真,验证本文方法的距离模糊抑制能力。模糊区点目标与主像面目标边缘处的距离-多普勒关系按照3.1节设置。面目标总能量与点目标能量之比为1:1(模糊点能量/主像能量0 dB)。图9给出匹配滤波算法得到的成像结果,图10给出本文方法得到的成像结果。
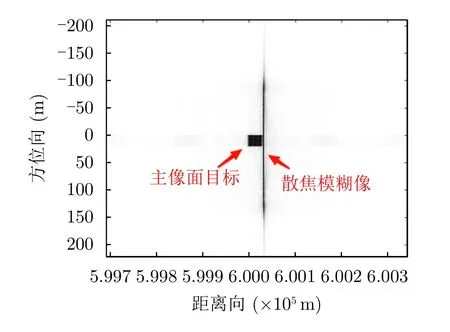
图9 主像区面目标,匹配滤波的主像结果Fig.9 Surface target in the main image area,primary image results of matching filtering
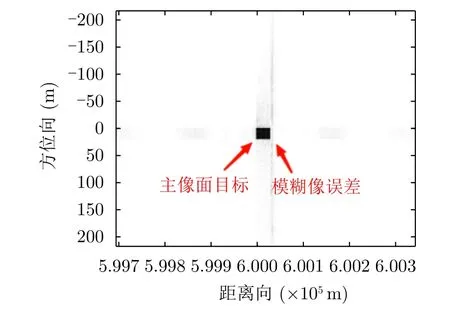
图10 主像区面目标,本文方法的主像结果Fig.10 Surface target in the main image area,primary image results of the proposed method
表5统计了成像后模糊像和主像总能量之比。可见,采用匹配滤波算法,模糊像能量与主像能量相当,对主像造成的影响目视明显。采用本文算法可以有效抑制模糊能量,相对于匹配滤波算法,模糊能量进一步抑制了14.9 dB。
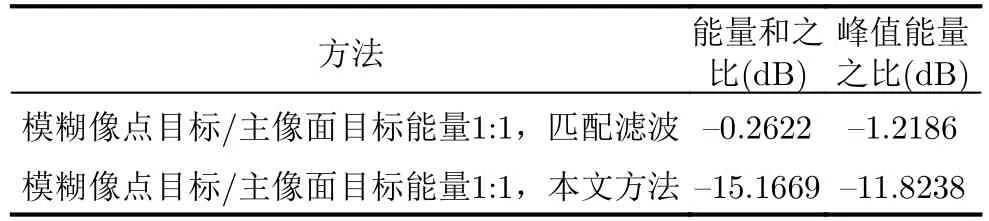
表5 距离模糊抑制前后,模糊像和主像总能量比Tab.5 Total energy ratio of fuzzy image and main image before and after fuzzy suppression
从高分三号卫星实际图像场景中截取区域1、区域2、区域3进行距离模糊抑制仿真,如图11所示,区域1为建筑区、区域2为海面、区域3为船舶目标。
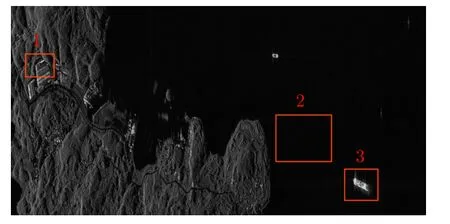
图11 实际图像场景Fig.11 Real image scene
以船舶区域3作为主像、建筑区域1作为模糊像,分析本文方法的距离模糊抑制能力。图12展示了匹配滤波方法得到的成像结果。图13展示了本文方法得到的成像结果。可见,本文方法对具有空间稀疏性的实际场景能较好地实现距离模糊抑制。
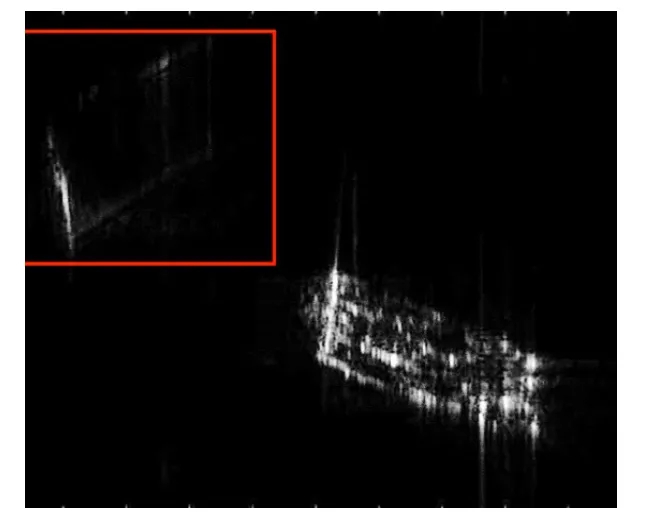
图12 区域3主像、区域1模糊像,匹配滤波的主像结果Fig.12 Primary image results of matching filtering,where region 3 is the main image,region 1 is the fuzzy image
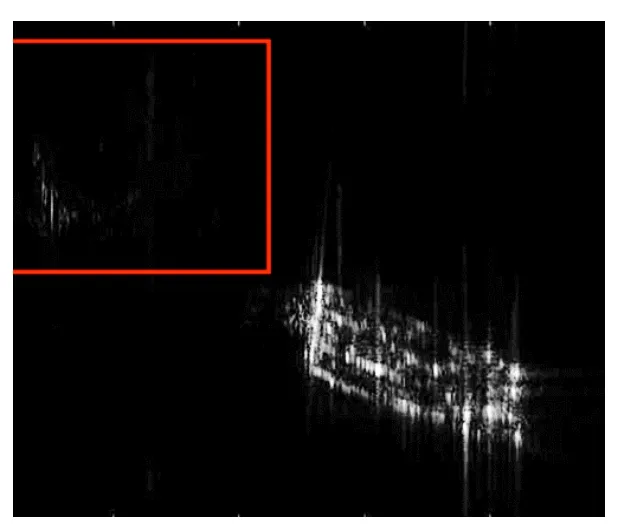
图13 区域3主像、区域1模糊像,本文方法的主像结果Fig.13 Primary image results of the proposed method,where region 3 is the main image,region 1 is the fuzzy image
针对同一数据(固定调频率),基于距离模糊区构建匹配滤波器并获得模糊区聚焦、主像散焦的图像,如图14所示。图15展示了主像(蓝色线)与模糊像(红色线)按照幅度大小排序后得到的幅度曲线。可见,虽然主像散焦,但其幅度仍然比模糊像强,利用CFAR检测强点难以将主像与模糊像区分开。
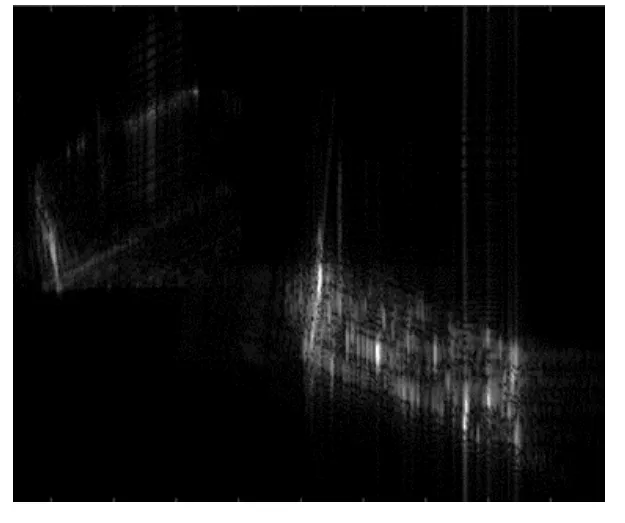
图14 区域3主像、区域1模糊像,针对模糊区匹配滤波的成像结果Fig.14 Fuzzy area image results of matching filtering,where region 3 is the main image,region 1 is the fuzzy image
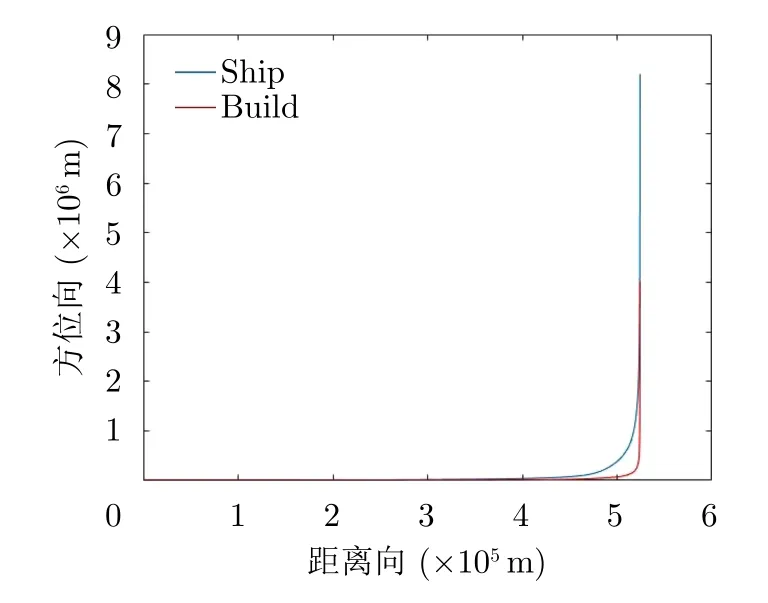
图15 按照幅度大小排序后的主像(蓝色线)与模糊像(红色线)幅度曲线Fig.15 Amplitude curves of main image (blue line) and fuzzy image (red line),sorted according to amplitude
以船舶区域3作为主像、建筑区域1作为模糊像,对比式(22)和式(18)的距离模糊像重建结果。由于船舶能量较强,式(22)仅重建模糊像时,会同时重建出部分主像,导致距离模糊抑制过程中同时损失了部分主像信号,造成主像辐射失真和细节损失,如图16所示。式(18)同时重建主像和模糊像时,则可以更好地保持主像细节,如图17所示。可见,对于主像存在强目标的情况,不能基于简化的式(22)仅重建模糊像,需要基于式(18)进行精确的重建。
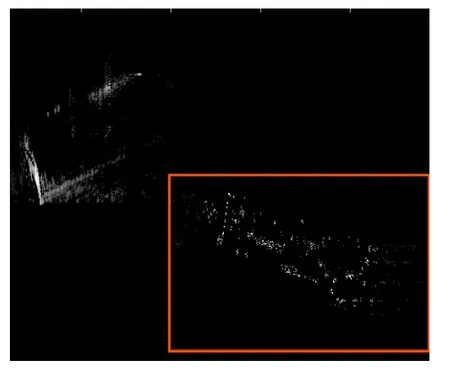
图16 区域3主像、区域1模糊像,式(22)模糊像重建结果Fig.16 Fuzzy reconstruction results using Eq.(22),where region 3 is the main image,region 1 is the fuzzy image
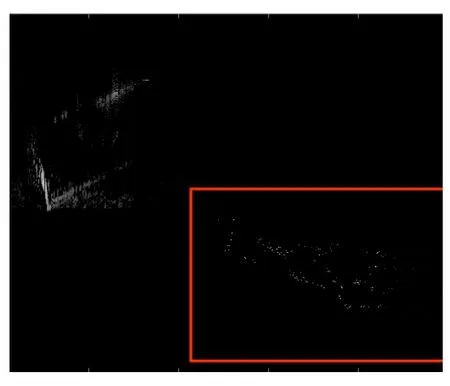
图17 区域3主像、区域1模糊像,式(18)模糊像重建结果Fig.17 Fuzzy reconstruction results using Eq.(18),where region 3 is the main image,region 1 is the fuzzy image
以海面区域2作为主像、建筑区域1作为模糊像,由于海面能量较弱,式(22)仅重建模糊像和式(18)同时重建主像和模糊像的结果基本相当。图18、图19和图20分别给出匹配滤波方法得到的成像结果、式(22)的模糊抑制和成像结果以及式(18)的模糊抑制和成像结果。可见,在主像能量较弱时,本文方法可以仅重建模糊像就得到较好的距离模糊抑制,进一步减小稀疏重建计算量。
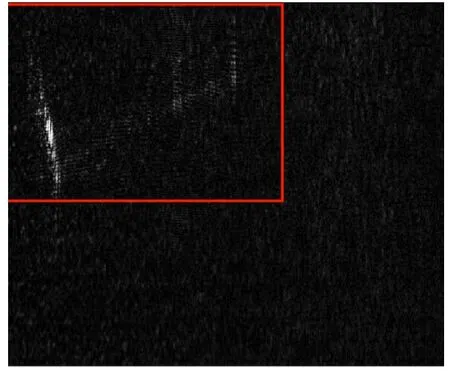
图18 区域2主像、区域1模糊像,匹配滤波的主像结果Fig.18 Primary image results of matching filtering,where region 2 is the main image,region 1 is the fuzzy image
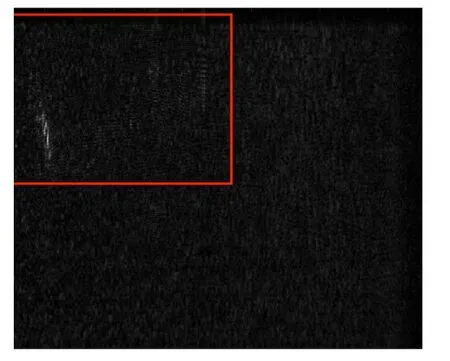
图19 区域2主像、区域1模糊像,式(22)模糊抑制和主像结果Fig.19 Fuzzy reconstruction results using Eq.(22),where region 2 is the main image,region 1 is the fuzzy image
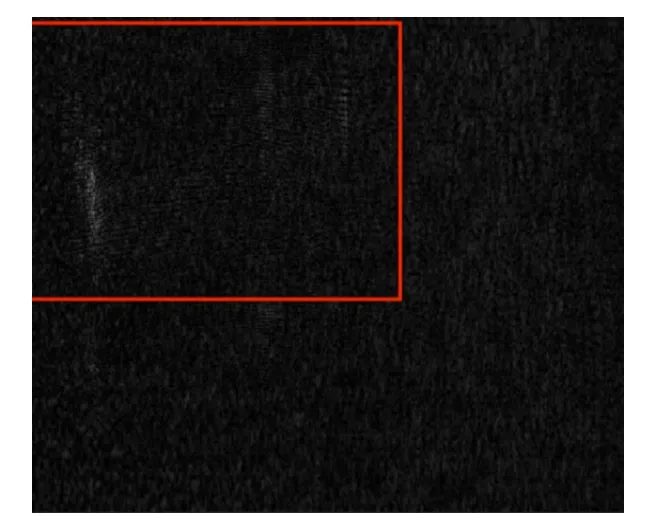
图20 区域2主像、区域1模糊像,式(18)模糊抑制和主像结果Fig.20 Fuzzy reconstruction results using Eq.(18),where region 2 is the main image,region 1 is the fuzzy image
5 总结
本文提出了一种结合稀疏重建算法和经典匹配滤波算法的距离模糊抑制方法,利用匹配滤波算法进行距离压缩和徙动校正后,通过构造每一个距离门内信号的模糊区观测矩阵和目标向量,得到模糊区图像和信号的估计值,实现模糊区信号和主像信号的分离,进而利用匹配滤波算法获取距离模糊抑制后的主像图像。相对于经典匹配滤波算法,本文方法不依赖正负调频信号体制,并且对模糊区信号和主像信号的区分效果更好,距离模糊抑制性能更高。本文方法利用了稀疏重建算法,因此需要场景具有空间稀疏分布条件。相对于经典稀疏重建算法,本文方法只需要对部分距离模糊能量较强的区域进行稀疏重建,并且只需要采用很低的稀疏度对少数强目标点进行稀疏重建,计算量大幅降低。对于高分辨率和大斜视条件下,主像和模糊像距离徙动差异超过半个分辨率单元时,本文方法不建议使用。本文方法在模糊像稀疏重建、模糊抑制、匹配滤波过程中引起的主像失真相对经典稀疏重建方法更小,对弱目标和细节信息保持精度更高。点目标、面目标和基于实际图像数据的仿真实验验证了本文方法的有效性和适用性。
