基于无人机的船舶尾气监测系统设计
2022-03-04冀青鹏李晓波
冀青鹏,李晓波,李 珂
(1.中国船舶集团有限公司第七一一研究所,上海 201108;2.船舶与海洋工程动力系统国家工程实验室,上海 201108)
1 引言
随着全球贸易的蓬勃发展,水路运输成为货运的重要组成部分,而运营船舶的数量急剧增多导致海洋大气污染日益严重,据相关统计海洋污染中的50%是由于水路运输造成的,船舶航行过程中产生的尾气污染,成为航运密集水域空气污染的主要来源[1],2019年1月1日起,《船舶大气污染物排放控制区实施方案》将排放控制区范围扩大到全国沿海及长江和西江干线,要求进入控制区的海船应使用硫含量不大于0.5%的燃油,2020年1月1日起,要求全球水域航行的海船都应使用硫含量不大于0.5%的燃油[2]。随着排放法规的日益严苛,海事部门对船舶大气污染物排放的监测监管压力也随之增大,目前海事局执法人员所使用的监控手段是直接登轮抽油化验,该种方法大大降低了执法人员的执法效率,提高了人工成本。以上海市为例,检测率不到0.5%。为了提高监控效率,目前有相关基于无人机的船舶气态污染物监测系统用来监测船舶气态污染物,但是系统使用GPRS方式传输数据,在港口码头等无信号区域无法实现信号的传输。
徐舜吉等[3]采用无人机搭载气态污染物监测吊舱监测船舶气态污染物的排放并将数据使用GPRS上传至远程服务器,远程服务器运行分析算法计算船舶监测船舶的燃油含硫量,从而判断船舶排放是否超标,该种方式使用GPRS数据流量作为数据传输方式,在有运营商信号的区域能较好的完成监测任务,但是在没有运营商信号区域无法上传数据到远程服务器,这对监测有一定影响。
史华杰等[4]采用无人机监测船舶排放,使用GPRS数据流量作为数据传输的通道,同样该种通讯方式在电信运营商信号覆盖良好的地区可以较好地传输数据,但是在港口近海区等地方不能正常传输数据,同时系统通过燃油燃烧实验判定燃油含硫量,该种方式需要多样本标定模型,才能准确获得船舶燃油含硫量。
LoRa技术是LPWAN通信技术中的一种,是美国Semtech公司采用和推广的一种基于扩频技术的超远距离无线传输方案[5],LoRa无线技术作为物联网“最后1 km”的接入方案,在企业物联网专网建设方面更具有优势,无线网关在城市覆盖距离可达2~5 km,农村等空旷地带可达到15 km,主要部署在居民楼小区楼顶等地方,穿透力强且电磁辐射低,选址灵活,可远距离覆盖地下室,弱强电井等地方[6],在空旷的码头等地区具有应用优势。
目前还没有针对港口等特殊环境中监测船舶气态污染物系统的总体设计,导致监测船舶气态污染物成本高、效率低、精度差,因此,本文结合电子技术、电化学传感器、气态污染物扩散特性设计了基于无人机的船舶气态污染物排放监测系统,该系统具有更全面的传感器包括气态污染物浓度传感器,气象参数传感器,定位传感器,更加灵活的监测方式,大大提高了船舶气态污染物监测的效率和精度,同时也降低了监测的成本。
2 系统设计
监测系统由传感器及气体处理系统、控制系统、通信系统无人机系统组成,监测船舶气态污染物时,系统热机程序完成且通信链路稳定后通过无人机搭载监测系统飞行至目标船舶排烟后方,无人机按照监测路径飞行监测,使用计算系统中的控制软件,打开空气泵,使用控制软件监测目标船舶的污染物排放,查看污染物浓度曲线,确定污染物的峰值与平均值,计算出目标船舶的燃油含硫量,如果燃油含硫量超标,可以将浓度数据以及根据监测系统传回的GPS定位信息和第三方船舶AIS数据库获取目标船舶的船舶AIS数据进行保存(图1)。
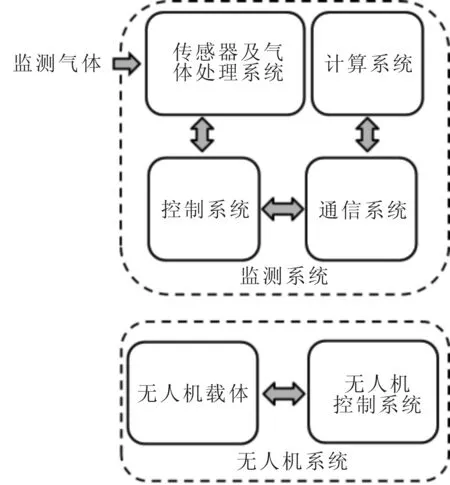
图1 系统结构原理
2.1 气体处理系统
气体处理系统为传感器的监测提供稳定良好的气体供应和监测环境,主要对待检测气体进行过滤,提供密闭的监测气体室。使用真空泵对密闭气体室中的待监测气体进行强制对流,以达到良好的监测实时性,由于无人机承重有限,气体室采用3D打印完成如图2所示,在保证紧凑性的同时最大限度减轻重量。
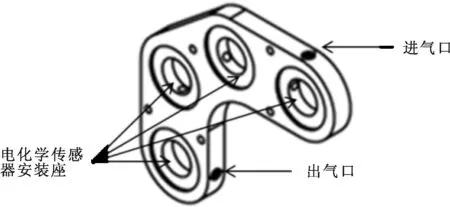
图2 气体室
2.2 传感器系统
传感器系统配备了NO、CO2、SO2、NO2四种气体浓度传感器、温湿度传感器、大气压传感器以及定位传感器,且根据无人机的特殊使用环境,NO、SO2、NO2气体浓度监测传感器采用英国Alphasense公司的B4系列高精度电化学传感器,CO2传感器使用Alphasense公司的NDIR传感器,两种气体浓度传感器都具有功耗低,稳定性高,结构尺寸小,灵敏度高,响应时间快的特点,适合无人机搭载监测。温湿度传感器采用SENSIRION公司的SHT3X-DIS系列传感器,大气压力传感器采用BOSCH的BMP280传感器。定位传感器使用UBLOX公司的NEO-6M模组。
2.3 控制系统
控制系统采用STM32F7系列芯片,搭载FreeRTOS实时操作系统,主要用于监测系统的运行流程控制,包括传感器信号的放大与转换,数据的存储,数据的发送控制指令的接收,传感器的标定等。控制系统以1 Hz的频率读取电化学传感器以及气压气温等传感器的值并通过标定程序将传感器值转换成实际量程值,然后通过MODBUS-RTU发送至无线LoRa通信模块,无线LoRa模块将数据发送至另一端的接收模块中。
电化学传感器较灵敏,传感器原始电流较微弱,系统使用低噪声放大电路对传感器信号进行放大,避免因其他信号的干扰导致传感器的不稳定。
控制系统与远程计算系统之间的通信作为监测系统较重要的一环,其中控制系统将气体浓度传感器的监测值通过LoRa无线模块发送到远程计算系统,同时接收远程计算系统发送的指令,监测系统使用了标准的MODBUS-RTU作为信息传送的协议,在控制系统和计算系统之间完成了数据的传递。
2.4 计算系统
2.4.1 燃油含硫量的计算
燃油含硫量可以根据硫碳元素平衡的原理来计算,假设燃油中的硫碳元素完全燃烧,且全部转换为SO2和CO2,则燃油含硫量可以使用式(1)来表示[7]。
(1)
式(1)中,FSC:燃油含硫量,单位%;CSO2,peak:SO2峰值;CSO2,mean:SO2背景值;CCO2,peak:CO2峰值;CCO2,mean:CO2背景值。
2.4.2 烟羽扩散仿真
船舶排放的气态污染物经过空气中的扩散,污染物浓度会逐渐降低,污染物浓度逐渐降低稀释的过程通常可以使用高斯扩散模型进行模拟[8],高斯模型适用的前提条件,污染物浓度在y、z轴向上的分布符合高斯分布(正态分布);在全部空间中风速是均匀的、稳定的;源强是连续均匀的;在扩散过程中污染物的质量是守恒的。
(2)
式(2)中,ρ(x,y,z)空间中某一点的浓度,单位为g/m3;Q:源强,单位为g/s;ū:平均风速,单位为m/s;σy:距远点x烟流中污染物在y向分布的标准差,单位为m;σz:距远点x烟流中污染物在z向分布的标准差,单位为m。
而实际上对于远洋船来说,船舶烟囱距离海平平面一般具有10 m左右的距离,因此需要考虑排放源的高度。
(3)
使用烟羽扩散高斯模型对源排为1000×10-9的排放进行模拟计算,结果如下,由图3可知在沿着风向污染物浓度逐渐降低,在距离源排200 m以内污染物浓度在50×10-9以上完全可以使用电化学传感器器进行测量污染物浓度。
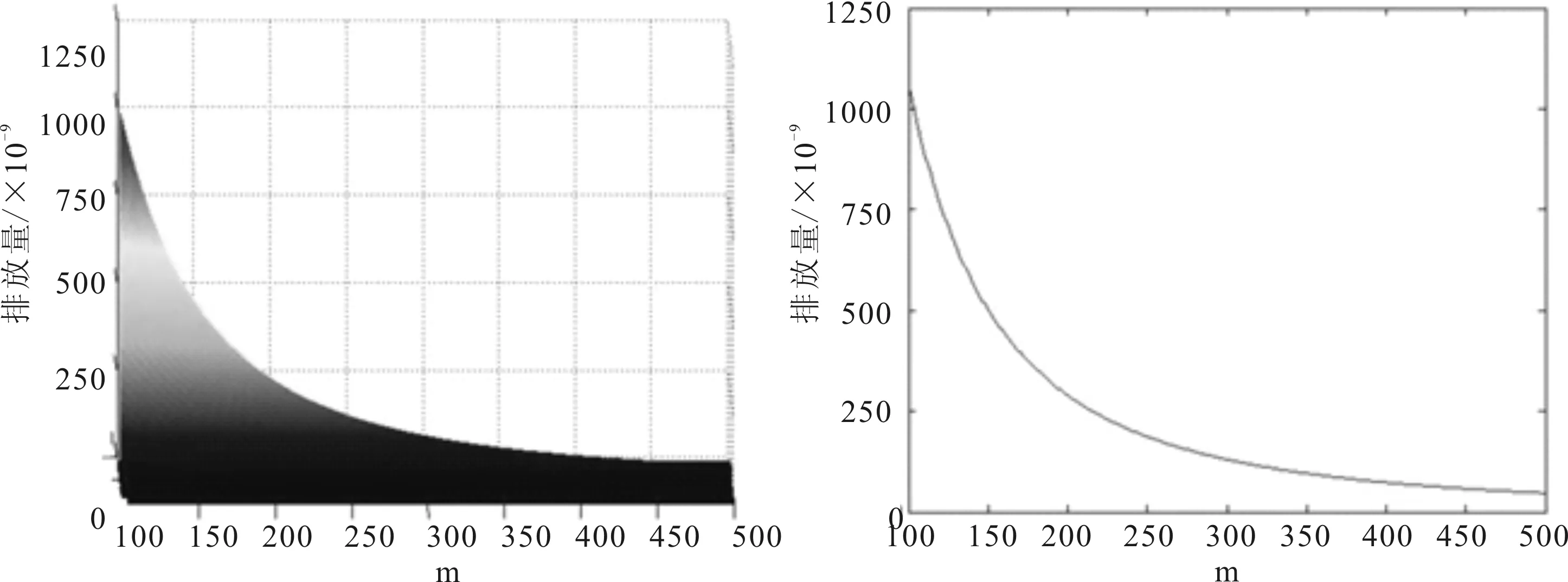
图3 高斯扩散仿真结果
2.4.3 监测系统
以VisualStudio2013为开发环境,以C#语言开发了监测系统的上位机软件,软件界面如图4所示,该软件具备监测系统的数据监测、历史曲线绘制、历史数据保存、燃油含硫量的计算、AIS数据加载等功能。系统使用式(1)的燃油含硫量计算方式计算当前被测船舶的燃油含硫量,并以监测系统返回的GPS信号通过第三方AIS数据平台获取监测系统当前所在地的船舶AIS信息,最后将排放信息、船舶AIS信息都存储到本地计算机上的数据库中,数据库使用MySql数据库,保证数据可靠保存。
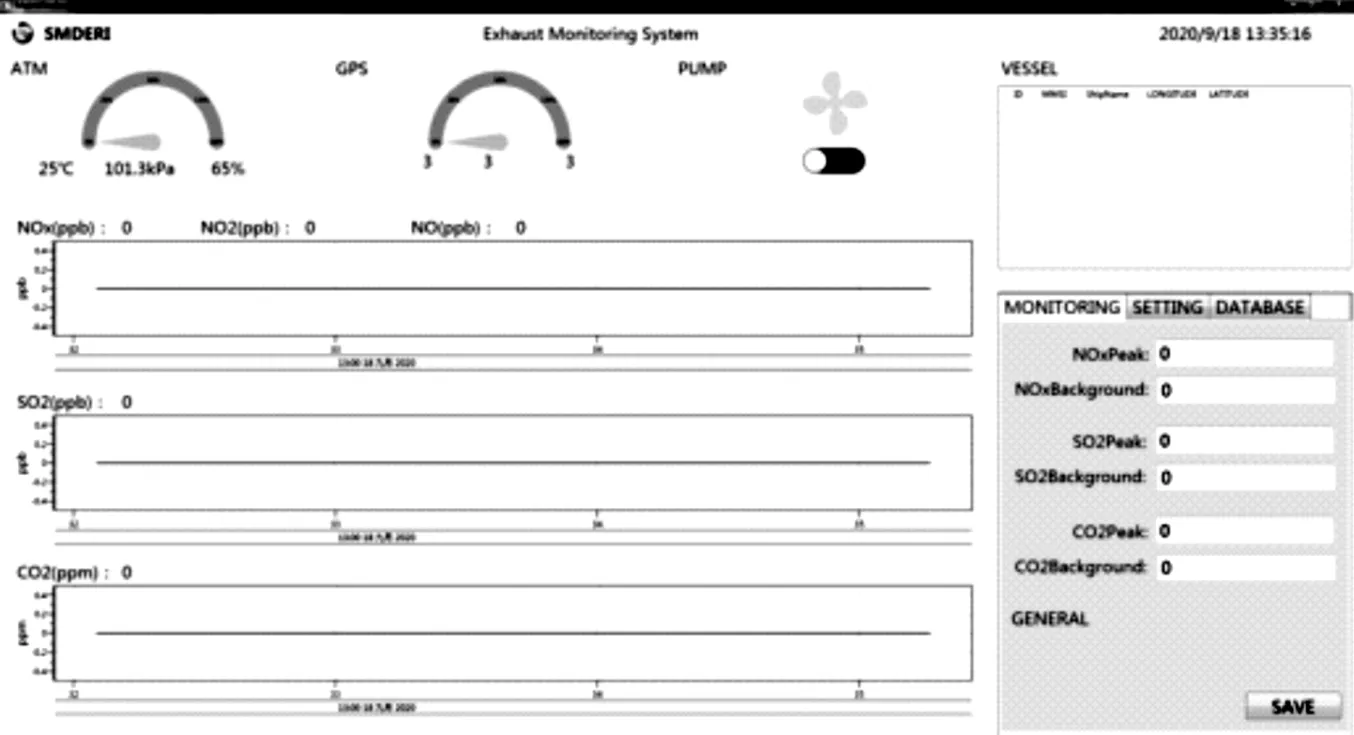
图4 监测软件界面
3 验证分析
3.1 实验验证
对集成后的系统使用标准气进行试验,准备好测试用标气,连接好气体管路,实验参数设置如表1所示,使用计算系统中的监测软件发送开启空气泵的指令,待传感器的值稳定后进行实验验证,验证实验分为使用高浓度和低浓度两种情况进行测试,测试结果如图5、图6所示。
表1 实验设置
3.1.1 高浓度测试
采用标气浓度从500×10-9以100×10-9为步长逐渐降低到100×10-9,记录传感器的ADC值如图5所示。

图5 高浓度测试结果
当SO2标气浓度从500×10-9每隔100×10-9逐渐降低100×10-9时,传感器的信号通过数模转换电路后其ADC值在(500~100)×10-9之间是大约以50为步长减小,当NO2标气浓度从500×10-9每隔100×10-9逐渐降低100×10-9,传感器的信号通过数模转换电路后其ADC值在(500~100)×10-9之间是大约以32为步长减小,当NO标气从500×10-9每隔100×10-9逐渐降低100×10-9,传感器的信号通过数模转换电路后其ADC值在(500~100)×10-9之间是大约以40为步长减小,由图5可知在高浓度时候气体传感器的线性较好,而且使用一次线性拟合也具有较大的斜率,因此有较高的监测精度。
3.1.2 低浓度测试
SO2传感器在SO2标气从100×10-9降低到10×10-9时其传感器的ADC值随着浓度降低而降低,在低浓度区(浓度小于100×10-9)时,由图6可知传感器的ADC值具有较小的斜率,而且使用一次线性标定会有一定的误差,使用多点标定即可较准确的监测SO2的浓度。NO2标气从100×10-9到10×10-9之间是亦随着浓度降低而降低,但是ADC值没有明显的差别,在低浓度区(浓度小于100×10-9)时,传感器的ADC值具有较小的斜率,在100~50×10-9范围内使用多点标定即可即可较准确的监测NO2的浓度。NO标气从100×10-9到10×10-9之间是也随着浓度降低而降低,在低浓度区传感器的ADC的值相比高浓度区具有较小的斜率,所以在监测低浓度的气体时会有较大的误差。
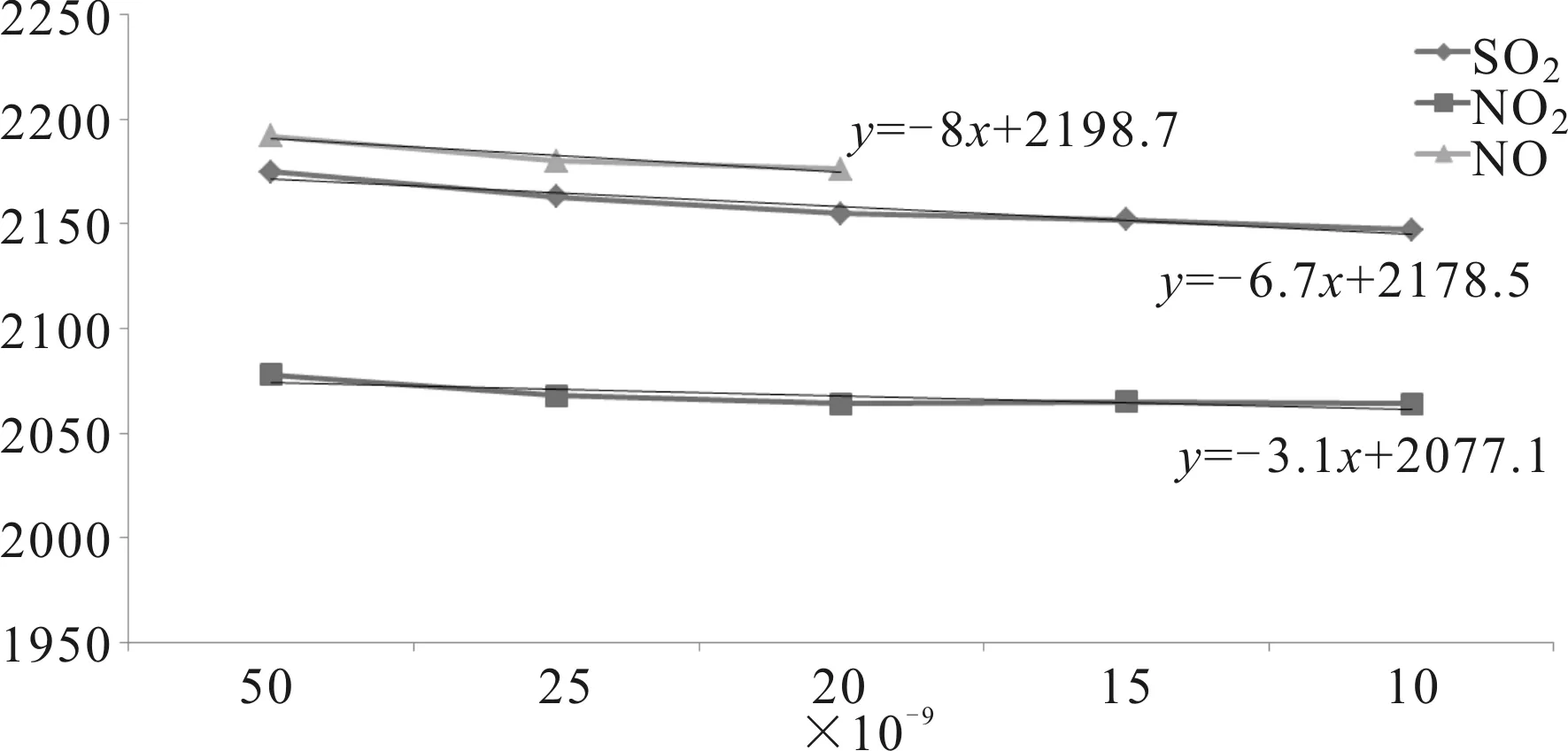
图6 低浓度测试结果
由于高浓度区域和低浓度区域的线性有较大差别,因此直接使用500×10-9至10×10-9之间使用一次线性拟合会造成较大的误差,分段拟合能达到较高的精度,即在500×10-9至100×10-9之间为一个拟合区间,100×10-9至10×10-9之间为另一个拟合区间,在高低浓度区间内使用多段拟合能提高测量船舶气态污染物浓度的精度。
3.2 实船验证
为验证无人机船舶气态污染物监测系统的数据传输性能,以每天10艘船舶进行了监测测试,共监测10 d,测试结果如图7所示,监测系统能有效传回传感器的数据并且根据气态污染物的浓度计算出燃油含硫量。

图7 实船监测结果
由图7测试结果可知,使用LoRa数据回传方式在无电信运营商信号区域能较好的回传数据,且回传成功率为80%,而成功率达不到100%的原因为监测距离太远以及海水吸收无线信号等。
4 结论
以电化学传感器为主的船舶气态污染物排放监测系统通过无人机搭载监测系统近距离监测目标船只,大大提高了检测效率,而且靠近船舶处由于船舶排放浓度高电化学传感器具有较好的分辨率,通过实验测试传感器在高浓度范围内具有较好的线性度,但是从100×10-9到10×10-9范围中线性度较差,因此在全量程范围内使用多段拟合能提高监测精度,此外在LoRa信号范围内能较好地回传监测数据可以进行船舶气态污染物排放的监测。
