基于双象限运行模式的能量回馈装置技术研究
2022-03-03李晓宁
李晓宁
0 引言
达到稳定牵引网压和能量回收的双重效果。 在地铁供电系统中,列车制动时多采用电气制动,而当列车实施电制动时,列车停止从直流牵引网受电,同时列车电动机转为发电机,机械能转变为电能,产生制动力,而产生的再生电能将使牵引网压升高。传统的逆变式能量回馈装置可以通过利用列车再生制动产生的电能逆变为交流电能回馈到交流电网,实现能量的有效吸收和二次利用。本文在此基础上提出一种基于双象限的能量回馈装置,交流侧通过35 kV能馈变压器接入交流电网,直流侧通过直流启动控制柜接入牵引网中。当牵引网电压高于设定阈值时,装置进入能量回馈模式,将列车制动产生的能量回馈到35 kV交流电网;当牵引网电压低于设定阈值时,装置进入牵引供电模式,为列车提供牵引能量,降低牵引网电压大幅度波动。装置双象限运行,实现了能量的双向流动,
1 能量回馈系统原理
能量回馈装置主要由变流器、能馈变压器、滤波器(电抗器)等组成[1],主电路原理如图1所示。
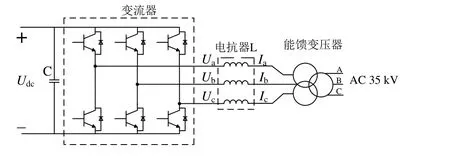
图1 能馈主电路原理
直流牵引网通过直流软启动接入变流器,电能经过电抗器滤波后接入能馈变压器,最后送至电网。其中变流器为装置的核心部分,其原理是根据设定的直流电压阈值,以及检测到的直流网压Udc的实际值,计算需要传输的功率,再根据功率计算变流器需要输出的交流电压Ua、Ub、Uc,继而控制电流Ia、Ib、Ic,实现能量的双向流动[2]。
2 双象限运行的控制原理
能馈装置的单相等效电路如图2所示。
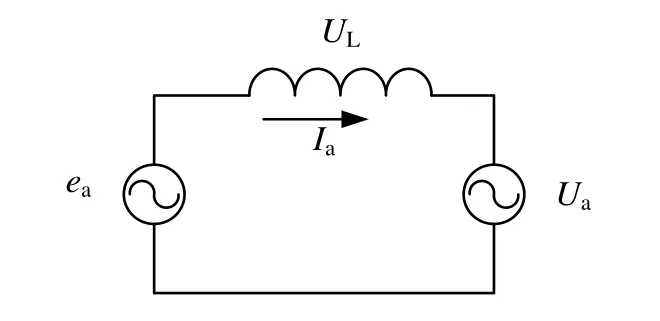
图2 能馈装置单相等效电路
其中,ea为电网电压,Ua为变流器输出电压,UL、Ia分别为负载侧电压、电流。其等效数学模型如下:

为实现控制变流器的传输功率,在网压ea和电感L确定的情况下,通过控制Ua的大小和相位,间接控制电流Ia的大小和相位,实现变流器交流网侧功率因数为1或-1。
图3为能量回馈运行状态向量图。如图3(a)所示,当电压Ua端点在圆弧和轨迹上运动时,Ua与Ia同向,能馈装置处于牵引整流状态,此时电网通过能馈装置输出有功功率和无功功率段为感性无功,段为容性无功)至负载。当运行至B点时,则能馈装置仅从电网吸收有功功率,不吸收无功功率。当运行至C点时,能馈装置仅从电网吸收无功功率,不吸收有功功率。
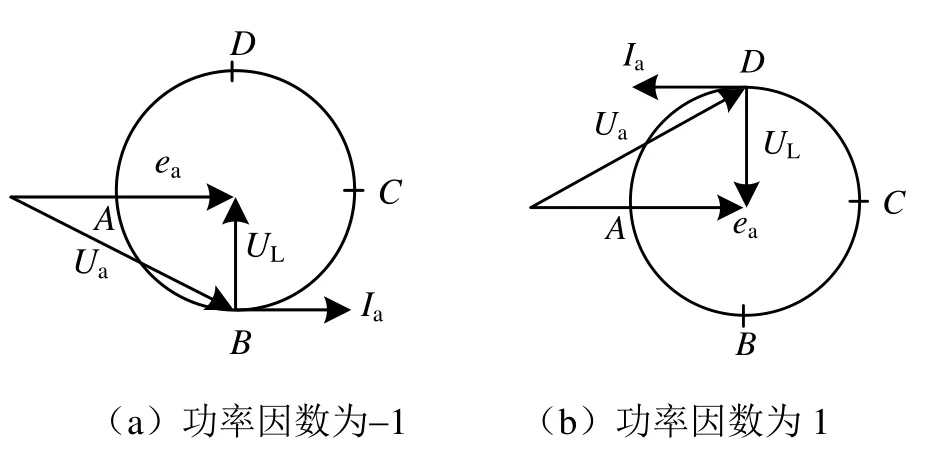
图3 能量回馈运行状态向量图
如图3(b)所示,当电压Ua端点在圆弧和轨迹上运动时,能馈装置处于逆变回馈状态,此时,能馈装置向电网回馈有功功率和无功功率段为容性无功,段为感性无功),直流牵引侧电能通过能馈装置传输至电网。当运行至D点时,能馈装置仅回馈有功功率,不回馈无功功率。运行至A点时,能馈装置仅从直流侧牵引网吸收无功功率,不吸收有功功率。
综上所述,电压矢量Ua工作在B点和D点,就实现了能馈装置的整流和逆变及向电网吸收和回馈电能的功能,达到能量双向流动的效果。因此,要实现变流器的双象限运行,关键在于控制变流器交流侧的电压,研究采用电压外环、电流内环的双闭环控制策略。
3 双闭环控制策略
3.1 dq解耦控制
因交流电网侧的电量均为时变量,导致控制系统的设计较复杂。为便于控制系统设计,采用坐标变换的方法,将三相对称静止坐标系(a,b,c)转换成以电网基波频率同步旋转的两相(d,q)坐标系。经dq坐标变换后,三相(a,b,c)坐标系里的正弦变量转换为两相(d,q)坐标系里的直流变量,简化了控制系统的设计[3]。
如图1所示,将三相桥臂输出端电位分别定义为uA,uB,uC;电网侧的电压分别为uga,ugb,ugc;电路中的电感内阻等效为R;三相桥臂输出电流为ia,ib,ic。经过dq变换后,dq轴的电压分量和电流分量分别为ud,uq和id,iq,电网侧的dq轴电压分量为ugd,ugq。
三相逆变电路在dq坐标系下的数学模型为

由式(2)可以看出,d轴和q轴的电压和电流分量是耦合的。经过dq坐标变换后,考虑到q轴电流iq远小于d轴电流id,电流iq对id的影响可以忽略不计,而d轴耦合到q轴的电压分量为ωLid,不可忽略,因此d轴电流id会影响到q轴电压uq的变化。需要对式(2)进行解耦控制,将式(2)变形可得

如果令

则有

从式(5)中得出,当 du′和 qu′作为id和iq的等效电流控制量时,d轴和q轴的电流实现了解耦控制,等效电流控制量du′和 qu′的输出由PI调节器决定,如式(6)所示:
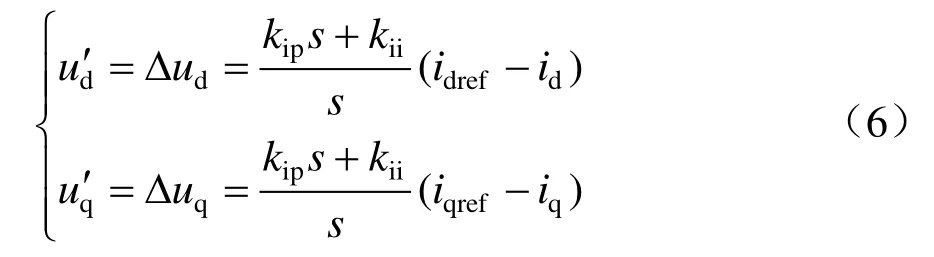
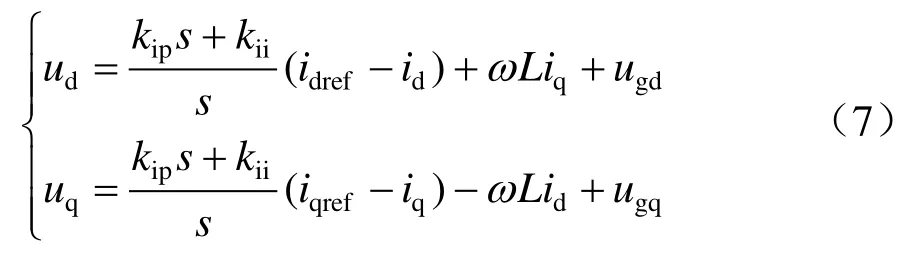
式中:Δud、Δuq分别为d轴和q轴电流调节器的输出;电流控制器采用PI控制,kip为PI控制的比例系数,kii为PI控制的积分系数;idref和iqref为d轴和q轴给定的电流值;s为复频率。因此可以得到电流控制变量ud和uq控制方程:
3.2 电流内环参数设计
图4为电流内环控制框图,其中kpwm为调制波到逆变桥输出电压的传递函数,一般情况下开关频率远大于调制波频率,此时kpwm可近似表示为Vin/2Vtri,其中Vin为直流输入电压,Vtri为三角载波幅值。T1为开关周期,T2为采样周期,L为交流侧滤波电感,R为电感内阻,kif为电流反馈系数。

图4 电流环控制框图
加入电流调节器前,电流环的开环传递函数为

在实际系统中,电网电压ugd的变化对于电流环是一个变化缓慢的扰动,而在电流控制器的控制过程中,可以近似地忽略这种扰动作用,认为电网电压保持不变,从而得到加入电流调节器后电流环开环传递函数:

选定电流环的截止频率。加入调节器的开环传递函数在fc处的相角裕度,令s= j·2πfc,代入式(9),同时根据频域稳定特性,经过计算可以得出kip和kii的值。
3.3 电压外环参数设计
图5为电压外环的控制框图。电压控制器也采用PI控制,kvp为PI控制的比例系数,kvi为PI控制的积分系数,Cin为直流侧电容,kvf为直流电压反馈系数,同时将电流闭环的传递函数Giclosed视作一个整体[4]。
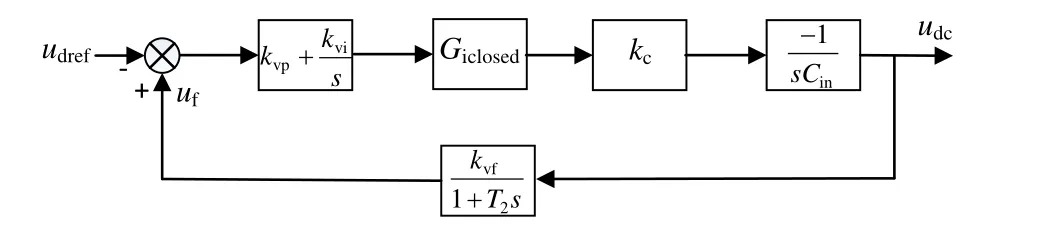
图5 电压外环控制框图
其中,

由此可得电压环校正前的开环传递函数为

电压环的PI参数计算与电流环同理。
电压外环与电流内环形成双闭环控制,其控制框图如图6所示,kc为逆变器输入电流和输出电流峰值的比值,ib为直流输入电流,ud为直流电压。
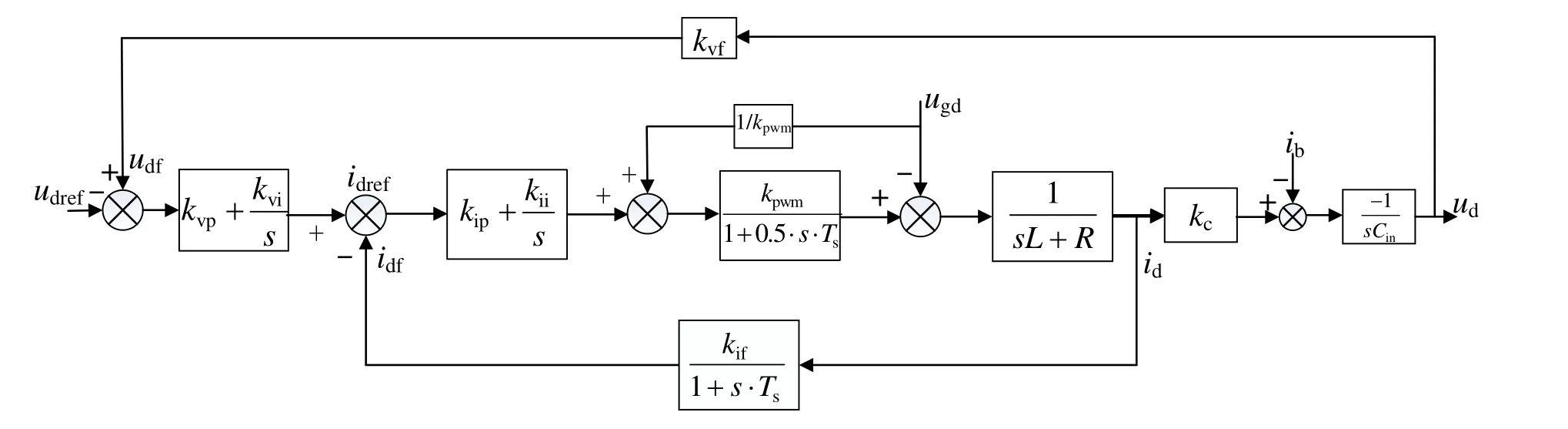
图6 双闭环控制结构框图
4 能馈装置技术方案验证
基于上述设计及其控制策略搭建模型[5],如图7所示。

图7 能馈装置仿真模型
逆变回馈工作模式下,各项性能仿真条件如表1所示。

表1 仿真条件
图8所示为在逆变能馈模式下装置交流侧输出的电流波形。根据波形可以看出,当直流侧电压超过设定阈值后,装置进入逆变能馈模式,待直流电压稳定后,装置闭锁,电流降为0。从图中可以看出,变流器电流输出稳定,且能迅速达到额定电流值,经测量额定电流谐波失真率为2.1%,回馈电能质量较好。

图8 变流器电流输出波形
图9所示为整流牵引模式下装置输出直流电压。从图9(a)可以看出,当电压超过设定值1500 V时,直流电压能够迅速稳定到指定电压值。图9(b)所示为直流纹波电压波形,通过计算分析,直流侧电压纹波系数为0.85%,显示了该装置可输出稳定的直流电压。

图9 直流侧输出电压波形
5 结语
本文所述的基于双象限的能量回馈装置相较于逆变式能馈装置,提供了整流牵引功能,在逆变回收电能的同时,可在牵引网电压降低时向牵引网提供稳定的电能,保证了牵引网的电压稳定。装置采用电压外环和电流内环的双闭环控制策略,降低了回馈时电流谐波含量和牵引时的直流电压纹波系数,装置回馈优质电能的同时保证了牵引供电电压的稳定性。
