基于NSGA-II的ADAS传感器配置优选方法及应用
2022-03-03文健峰杨杰君
周 莉, 文健峰, 杨杰君, 王 全
(1.中车时代电动汽车股份有限公司,湖南 株洲 412007; 2.长沙中车智驭新能源科技有限公司,长沙 410000)
辅助驾驶系统(ADAS)可提升汽车行驶时的安全性,是当前的研究热点。实现辅助驾驶功能的前提是有效感知车辆周围交通环境信息。为满足驾驶场景多样化的需求, 往往通过增配传感器来提高特定功能的感知效果,但这样会造成系统传感器配置冗余和资源浪费。
对汽车多功能ADAS的传感器优选配置,实现高效的系统集成是未来智能汽车的发展方向。本文提出一种ADAS传感器配置优选方法,通过设计传感器优化目标函数及其约束条件,采用带精英策略的非支配排序的遗传算法(NSGA-II)对传感器配置方案进行综合寻优,最后通过PreScan软件对优化配置进行案例分析,验证方法的可行性。
1 传感器配置优选方法
传感器配置的优化需要导入整车信息与传感器信息:整车信息包含整车的长度、宽度信息;传感器信息包括探测距离、视角、距离精度、成本、可靠性(MTTF)信息。
1.1 优化目标函数及其约束条件设计
为优化传感器配置,需要建立传感器优选的评价指标与体系,对其方案优劣性进行量化。本文建立的传感器优化目标函数及约束条件如下:
1) 探测区域覆盖率优化目标函数()。探测覆盖率越高,传感器盲区越小。

(1)
式中:为所配置的个传感器集合,其中每一个元素值代表传感器的编号;为所需要探测的目标区域面积;()是该传感器集合配置探测的有效面积;为第个传感器探测面积;为个传感器探测面积的交叉部分的总和。
第个传感器探测的面积通常通过该传感器的探测距离和视角求得,需要建立传感器探测距离和视角的约束条件,见式(2)。
≥,≥∈1,2…,
(2)
式中:为配置传感器集合后的有效探测距离;为编号处传感器的最小探测距离要求;为配置传感器集合后的有效视角;为编号处传感器的最小视角要求;为车辆配置传感器的编号总数。
2) 探测距离精度优化目标函数(),见式(3)。在满足测量精度要求的前提下,传感器的探测精度越高,ADAS的控制精度越好。
(3)
式中:为所配置传感器集合后的测距精度误差,其约束条件见式(4)。
≤
(4)
式中:为编号传感器的最小探测距离要求的最小精度。
3) 成本优化目标函数()及约束条件见式(5)。在满足性能要求的前提下考虑传感器的购置成本。

(5)
式中:为传感器集合中编号的传感器的购置成本;为传感器配置集合成本的最高限价。
4) 可靠性无优化目标函数,只要满足约束条件即可。采用传感器的平均使用寿命建立其约束条件,见式(6)。
min[MTTF()]≥
(6)
式中: MTTF为传感器集合的平均使用寿命;为系统所要求的最小使用寿命。
1.2 基于NSGA-II的配置方案综合寻优
配置方案综合寻优是根据整车及传感器信息和上述目标函数与约束条件,采用多目标全局寻优算法对传感器参数及其安装位置进行多目标寻优计算,给出优化后的传感器配置方案(含安装位置)。
采用NSGA-II进行求解,以加快搜索过程中的收敛速度,根据排挤机制,对秩相同的个体进行保留,有效地保护最优解的多样性。传感器配置方案的NSGA-II优选步骤如下:
1) 导入传感器优选配置的目标函数与约束函数,种群大小,迭代步骤。
2) 在约束函数中随机产生一个种群大小为的初始化种群,计算种群内每个个体的目标函数值并进行排序,计算其拥挤程度。
3) 通过锦标赛法选择精英个体,通过交叉、变异操作生成一个种群大小同样为的子代种群。
4) 将子代种群和父代种群进行合并,得到一个种群为2的新种群。
5) 对采用拥挤比较算子排序,一次选取排序最优的个体复制到新种群+1中,直到新种群规模为,此时为一次循环,循环代数+1。
6) 判断是否达到最大迭代次数或满足设定条件。若不满足,则重复步骤3)至6),直到满足条件,计算停止并给出综合寻优后的传感器配置方案。
2 案例分析
选择ADAS中常见的自适应巡航与换道辅助功能为应用场景,应用PreScan软件进行仿真验证,考核配置的传感器集合的有效性。
2.1 整车与传感器信息导入
整车信息导入:车辆长度5 m,宽度2.4 m;传感器信息导入:部分传感器的参数信息见表1,其中序号19为激光雷达。
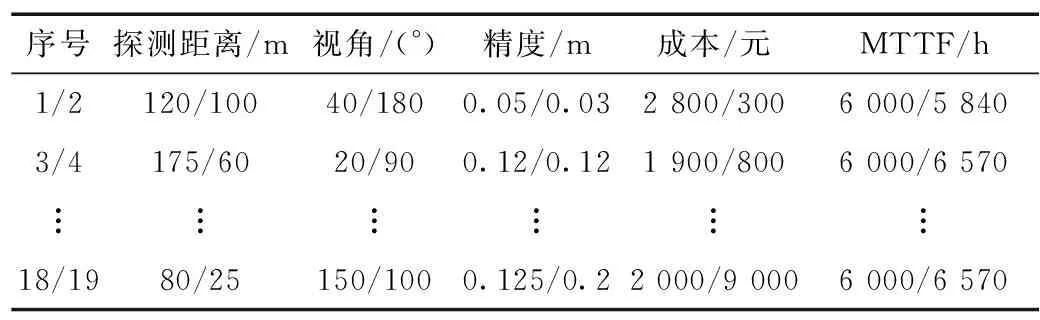
表1 备选传感器参数
2.2 配置方案的综合寻优
NSGA-II综合寻优算法在Windows10操作系统和Matlab2016环境中运行。在NSGA-II算法中迭代次数和种群规模的设置将影响算法的成功率和计算的时间;种群多样性,速度权重上下限也会影响计算时间。通过尝试不同的参数设置,最终优选一组参数进行综合寻优,其中迭代次数设为200,种群规模设为100,种群多样性设置为0.8,速度权重上下限分别设置为0.9和0.2。
通过上述优化目标函数及其约束条件,采用 NSGA-II 综合寻优方法求解出的优选配置方案如图1所示。

图1 优选配置后的传感器配置方案
2.3 场景验证设计
2.3.1 场景搭建
为了验证传感器优选方案的有效性,采用PreScan 虚拟仿真软件,首先创建一个典型的自适应巡航和换道辅助场景(跟随-换道-超车-保持),如图2所示。自车从左边超过1号车再与2号车跟车,场景参数如下:自车初始速度为60 km/h,自车最大加速度4 m/s,1号车速度为40 km/h,2号车速度为120 km/h,3号车速度为50 km/h,4号车速度为80 km/h,车道宽度为3.6 m,驾驶员反应时间0.8 s,安全距离为自车距前车后保险杠2 m。
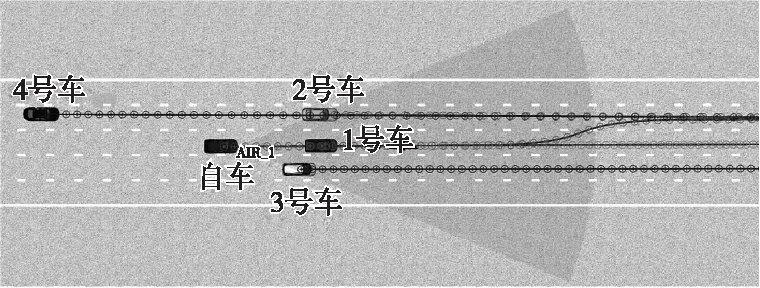
图2 自适应巡航和交通拥堵辅助场景示意
2.3.2 验证结果分析
通过PreScan仿真车辆的跟车巡航-换道超车过程,自车各传感器所探测到的目标距离信息如图3所示。图中传感器编号位置如图1所示。
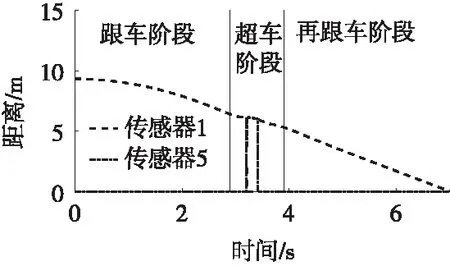
(a) 自车传感器1、5探测到1号车的目标距离
通过仿真分析可以看出,各传感器均能有效探测该传感器正前方和侧方的目标车辆;换道过程中,传感器随着车辆的转向与横摆,探测到的目标在传感器探测范围中的方位发生改变,但探测距离保持了连续性。该结果证明本文所提出的传感器优选配置方案可以有效覆盖自适应巡航和换道辅助功能的跟车、换道场景。
3 结束语
本文针对工程实践中的ADAS传感器配置冗余问题,提出了一种环境感知传感器配置优选方法。但仍有不足之处,未考虑到因实际道路的多样性不设计冗余传感器会造成的失效情况。后续将结合实际道路工况,在样车上对本文提出的ADAS传感器配置优化方法开展更深入的研究。