城市低空物流无人机航迹规划模型研究
2022-03-02张洪海张连东刘皞钟罡
张洪海,张连东,刘皞,钟罡
(南京航空航天大学,民航学院,南京211106)
0 引言
随着物流行业智能化需求的提升,使用无人机进行城市“最后一公里”配送成为行业发展趋势。在城市环境下,需预先为无人机规划出安全、经济、公众接受度高的航迹,以保证配送任务的完成。
目前,针对城市物流配送的无人机航迹规划技术研究较少。对于密集障碍物环境,文献[1]提出基于快速扩展随机树的固定翼无人机航迹规划方法,实现对静态障碍物的规避。文献[2]提出基于DOP图(Dilution of Precision Maps)的多无人机航迹规划方法,可满足多机楼宇间飞行的导航精度要求。文献[3]考虑城市风场环境,其航迹设计准则能够较好适应风场干扰。针对无人机物流运输航迹规划,文献[4]提出静态和动态航迹规划方法,对偏远地区配送航迹规划有指导意义。文献[5]将栅格危险度作为子目标函数,得到飞行平稳、安全度高的物流配送航迹。文献[6]引入危险度因子表征环境风险,提高了航迹的安全性。综上可知,当前研究多考虑无人机受到的环境威胁,例如,满足避障要求[1,4],增强导航性能[2],适应风场环境[3]等;或将航迹风险简化为栅格危险度考虑[5-6],未考虑无人机对周围环境,尤其对地面人群的影响。
针对以上问题,本文建立基于风险的城市空域环境模型,构建多目标物流无人机航迹规划模型,设计改进A*算法求解,得到高安全、低噪声、低成本的运输航迹。
1 问题建模
1.1 问题描述
设某城市区域建有一无人机物流配送中心,现需完成点对点配送任务。配送中心和目标配送点的位置已知,采用一台充电旋翼式物流无人机配送,需为其规划预先飞行航迹,以满足配送要求。
1.2 城市空域环境建模
1.2.1 空域环境表征
以O为原点建立空间直角坐标系,将城市空域等分成u×v×w个3 维栅格。设栅格划分精度为r,其中,可飞区代表可扩展栅格,禁飞和障碍物区代表无法扩展栅格。设栅格中心点为pabc,a、b、c表示栅格中心点在x轴、y轴和z轴方向上的序号,a=1,2,…,v,b=1,2,…,u,c=1,2,…,w。pabc的坐标为,其中,x=a×r,y=b×r,z=c×r。物流无人机可由两相邻可飞栅格的中心点平行栅格的边、面对角线或沿体对角线飞行,航迹节点扩展如图1所示。

图1 航迹节点扩展Fig.1 Illustration of track nodes extension
1.2.2 空域风险评估
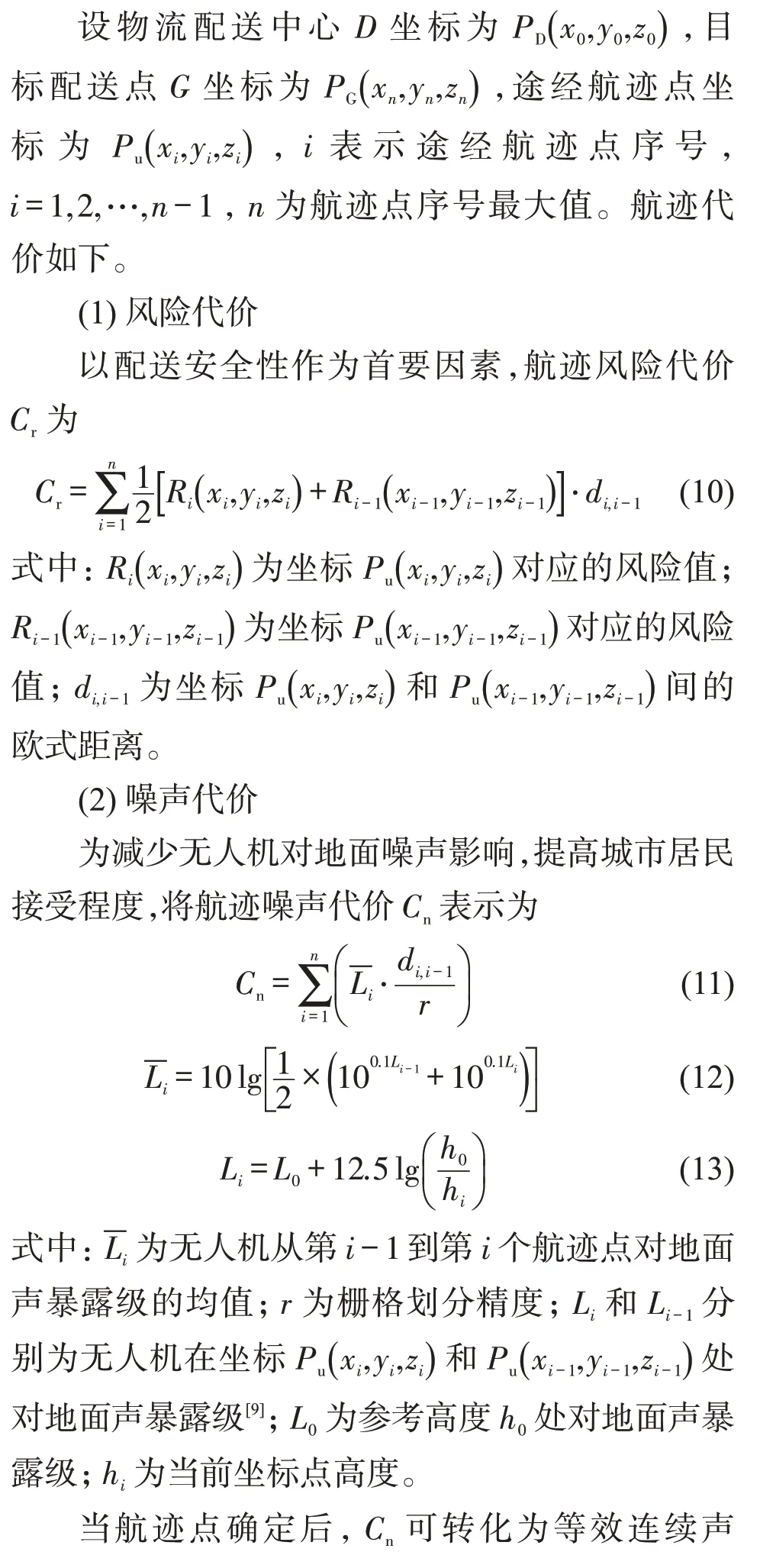
以物流无人机失控坠落造成地面人员死亡率作为运行风险的衡量指标,考虑以下因素计算无人机在空域中的风险值。
(1)地面人口数量

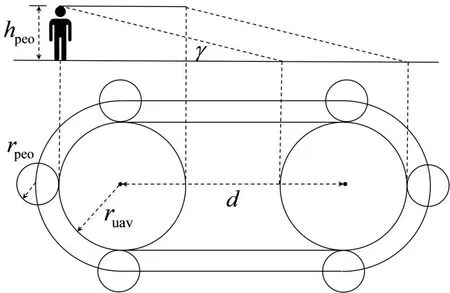
图2 坠落区域Fig.2 Illustration of casualty area for UAV falling
(2)地物遮蔽情况
城市中建筑、植被等对于缓解物流无人机坠落风险具有积极作用,可用遮蔽因子Ps表示,其取值如表1所示。

表1 遮蔽因子取值[7]Table 1 Value of Sheltering factor
(3)人员伤亡程度

1.2.3 空域环境生成

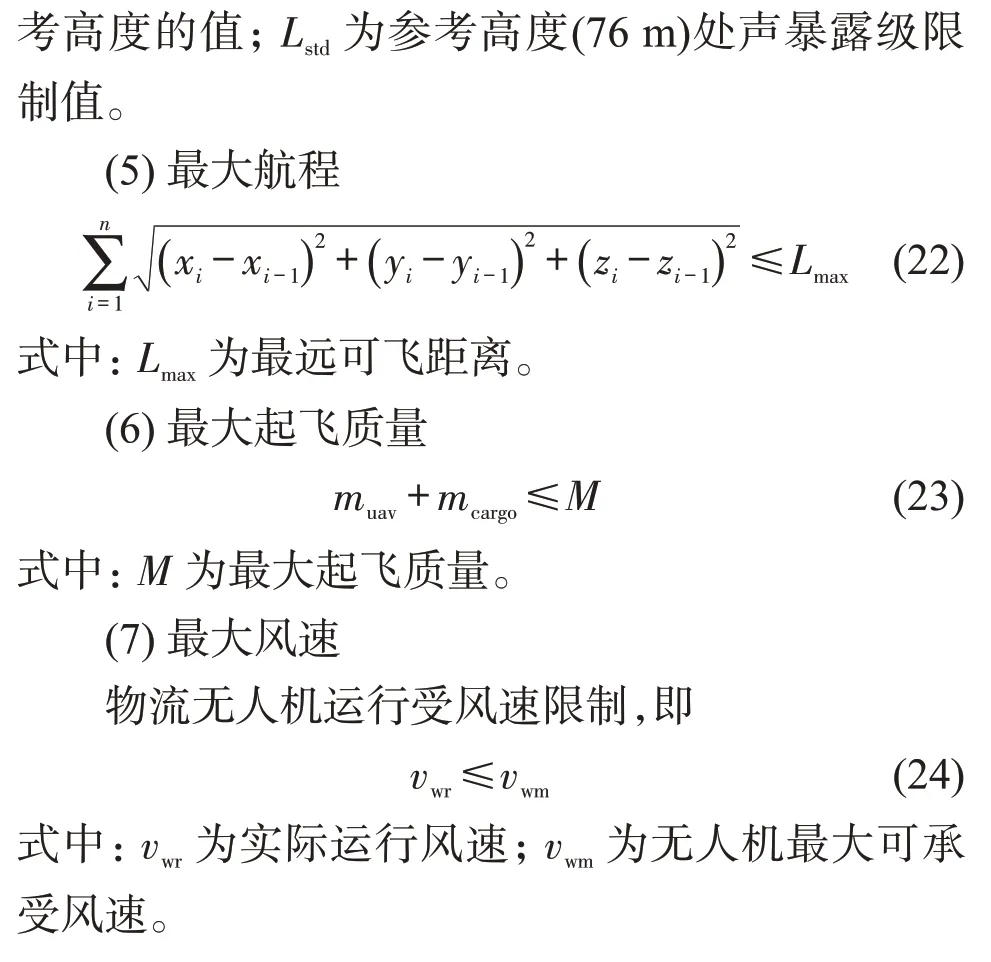
1.3 航迹规划模型
1.3.1 目标函数

1.3.2 约束条件
2 算法设计
2.1 A*算法原理
2.2 改进A*算法
2.2.1 估价函数设计


2.2.2 安全保护区
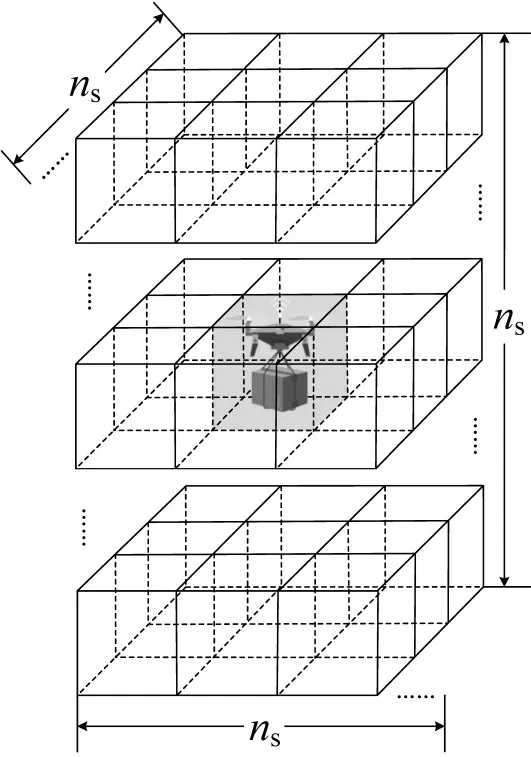
图3 安全保护区Fig.3 Illustration of safety protection area

2.2.3 动态步长调整

2.3 航迹平滑

2.4 算法流程
改进A*算法流程图如图4所示。
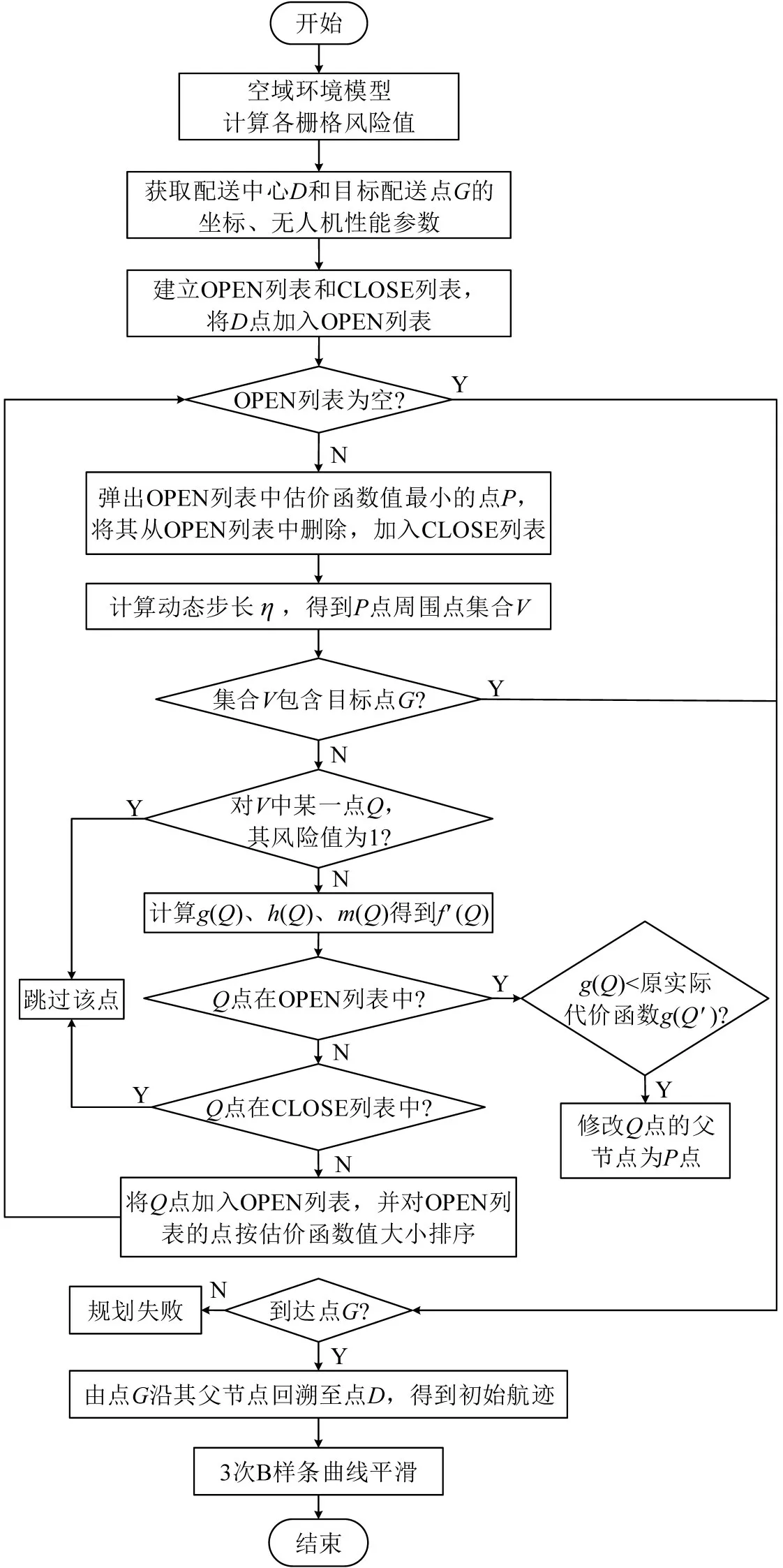
图4 算法流程Fig.4 Flow of proposed algorithm
3 仿真分析
3.1 参数设置
选取墨尔本地理高程数据进行仿真,设禁飞区坐标范围为{(885,510),(1045,455),(1075,555),(925,615)},高度0~300 m。地面人口密度与建筑高度成正比,范围取15×10-3~ 35×10-3人·m-2。遮蔽因子ps在建筑高度大于15 m 处取0.75,低于15 m 处取0.5。无人机主要参数参考大疆经纬200 设置,空域环境模型和航迹规划模型参数如表2和表3所示。
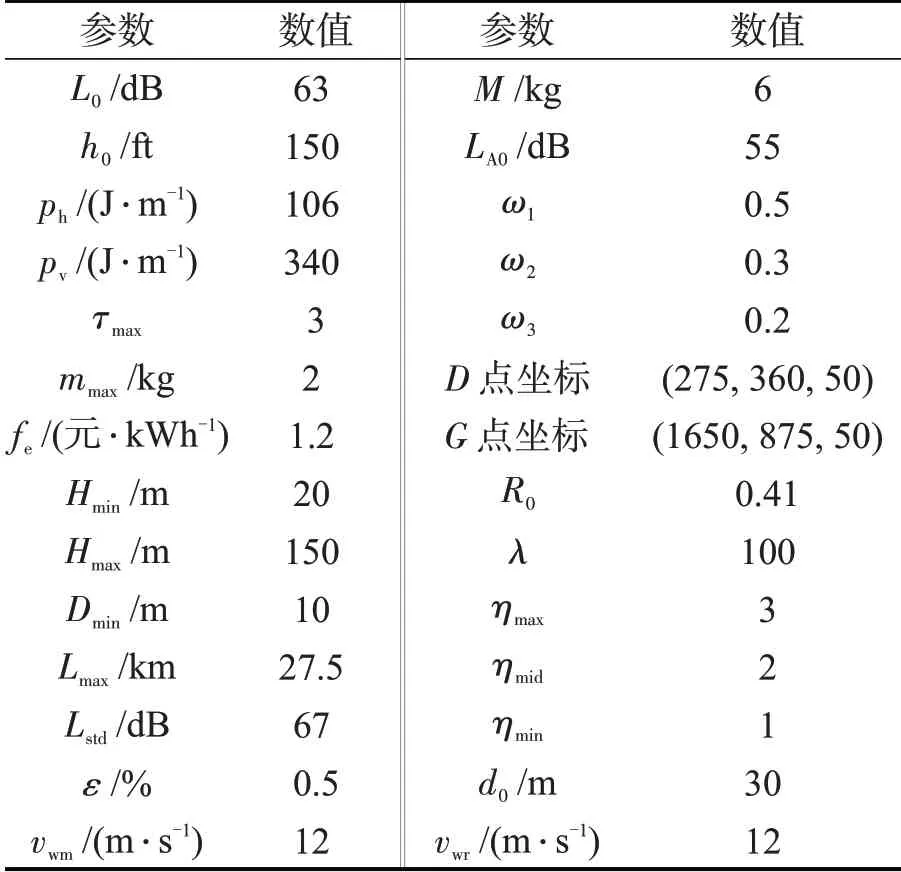
表3 航迹规划模型参数[6]Table 3 Parameters setting in track planning model and algorithm
3.2 仿真结果分析
3.2.1 空域环境模型验证
根据式(9)和表2 参数生成的运行风险如图5所示。

表2 空域环境模型参数[7]Table 2 Parameters setting in airspace model
风险值越高表示无人机运行风险越大,障碍物和禁飞区的风险值取1。由图5 可知,随着高度的增加物流无人机整体运行风险值逐渐增高。高度50 m 时,城市空域割裂,可飞区域风险值低于0.3,表明此高度飞行对地面运行风险相对较低;高度150 m时,空域变得开阔,但整体运行风险值增大,处于0.3~0.7之间;高度300 m时,空域连结成片,除禁飞区外,整体运行风险处于0.5以上,部分人口密集区超过0.7,表明此高度飞行对地面产生的风险相对较高。
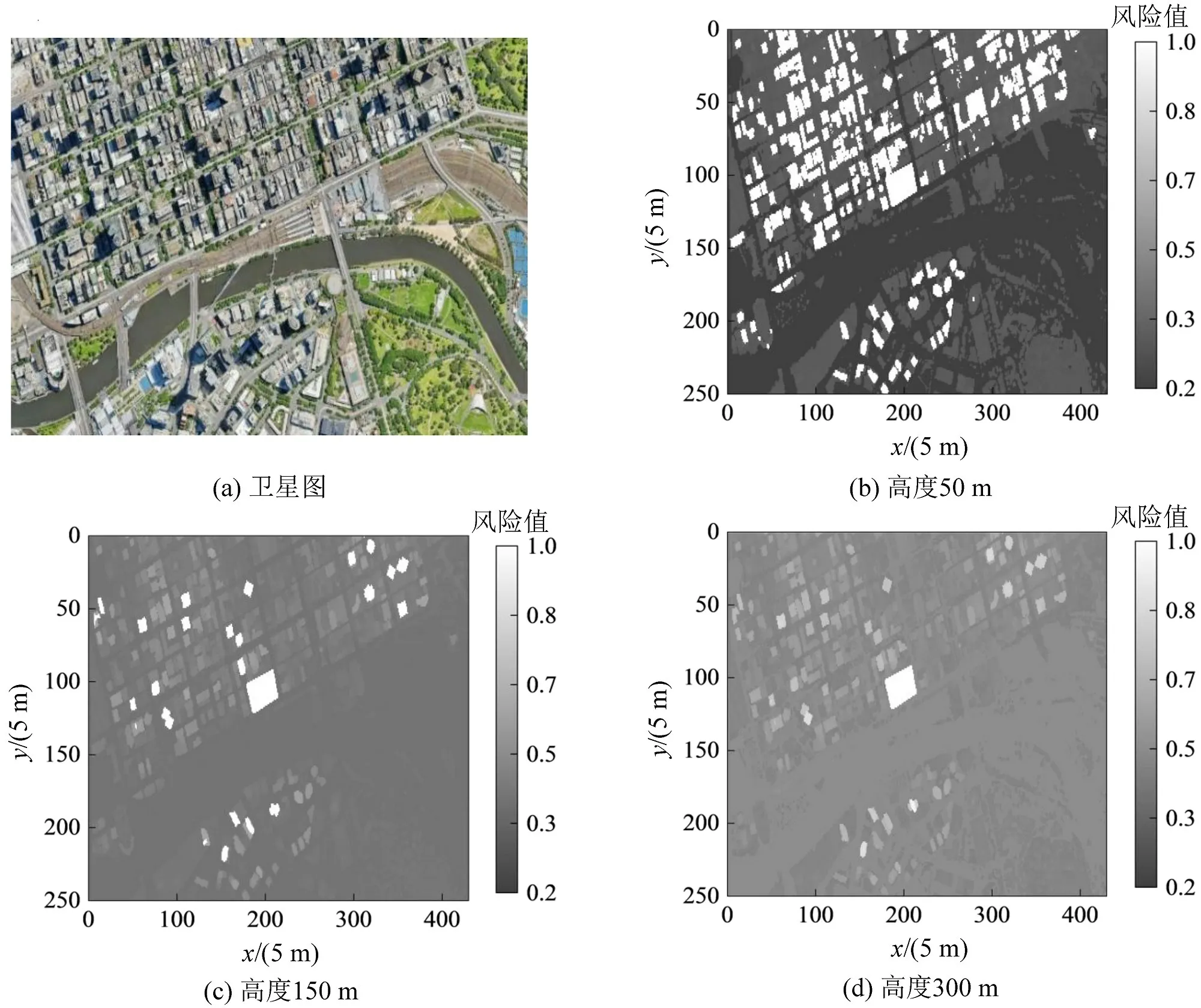
图5 不同高度物流无人机运行风险图Fig.5 Operational risk diagram of logistics UAV at different heights
3.2.2 算法分析与对比
采用改进A*算法、传统A*算法和文献[5]算法进行航迹规划,结果如图6、表4和表5所示。
由图6 中可知,改进A*算法航迹绕行少、更为平滑;由表4和表5可知,其风险代价、噪声代价、运输成本代价相较传统A*算法分别下降3.88%、0.45%和5.60%,相较文献[5]算法分别下降3.56%、3.12%和10.06%,表明估价函数能够引导算法搜索得到较优航迹点。
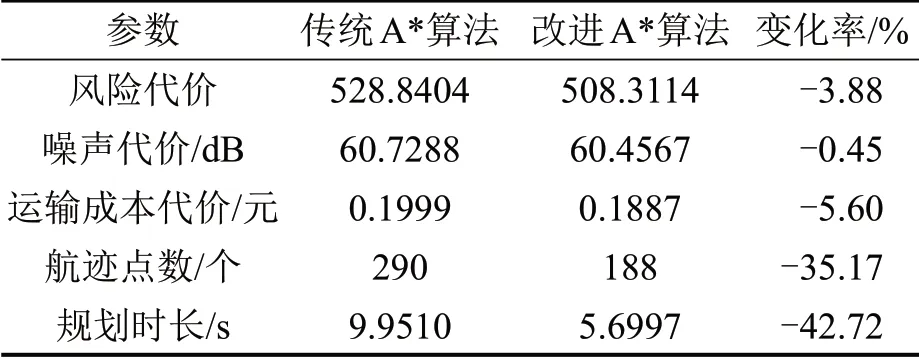
表4 传统A*算法和改进A*算法航迹规划结果对比Table 4 Comparison of track planning results between traditional A*algorithm and improved A*algorithm

表5 文献[5]算法和改进A*算法航迹规划结果对比Table 5 Comparison of track planning results between algorithm in reference[5]and improved A*algorithm

图6 不同算法航迹规划结果Fig.6 Results of different algorithms for track planning
相较传统A*算法,本文算法在航迹点数和规划时长上优势明显,分别减少35.17%和42.72%。这是由于采用动态步长,在障碍物稀疏时可减少不必要航迹点,更利于飞行。此外,大步长有利于快速接近目标配送点,提高运算速度。相较文献[5]算法,本文算法进一步降低风险代价,表明基于风险的城市低空空域环境,能够更加准确地量化物流无人机运行风险,提升配送安全性。同时,通过增加噪声代价,降低了航迹噪声水平,减少对社区居民影响。
3.2.3 模型参数设置分析
(1)代价权重系数
设置不同代价权重系数组合分析求解结果。各子目标代价权重以0.1 为步长从0.1~0.8 依次变化,各权重组合下的综合代价Co为

式中:coq为第o个代价权重组合下第q个子目标函数的归一化值;ωoq为第o个代价权重组合下第q个子目标函数的权重值。计算结果如图7所示,其中点越小表示综合代价值越小。

图7 不同权重组合计算结果Fig.7 Different weight combination calculation results
取综合代价最小点,绘制其至3个坐标轴的垂线,可知对应的权重组合为风险代价权重ω1=0.6,噪声代价权重ω2=0.1,运输成本代价权重ω3=0.3,取其为最优权重组合。
(2)安全间隔
在最优权重组合下,最小安全间隔Dmin由5~30 m以每5 m变化,实验结果如图8所示。
由图8(a)可知,随着安全间隔增加,运输成本和风险代价总体呈增加趋势,而噪声代价减小。这是因为安全间隔增大,导致无人机需从建筑物上方飞越,提高了运行风险,且爬升高度耗电量大,增加了运输成本,则对地噪声因此减少。根据式(37)计算不同安全间隔下的综合代价值,由图8(b)可知,在本文规划环境和权重设定下,参考大疆经纬200无人机参数,当最小安全间隔Dmin取15 m时,综合代价最小为0.301。

图8 不同安全间隔影响Fig.8 Influence of different safety separations
4 结论
本文通过建立基于风险的城市低空空域环境,以风险、噪声和运输成本代价最小为目标函数,考虑安全间隔、运行风险、运行噪声等约束,构建符合城市配送实际的物流无人机航迹规划模型。提出改进A*算法进行求解,仿真实验表明,本文算法规划时间短、航迹质量优,可生成高安全、低噪声、低成本的航迹。在本文规划环境下,参考大疆经纬200 无人机参数,当各子目标代价权重分别为0.6、0.1 和0.3,安全间隔取15 m 时,规划航迹综合代价最优。