偏航与变桨工况对风力机尾流特性影响研究
2022-03-02吴昊潘孝兴赵红民赵海钟郑康乐赵振宙
吴昊,潘孝兴, 赵红民,赵海钟,郑康乐,赵振宙
(1.中国华能集团有限公司河南分公司,郑州 450018;2.河海大学能源与电气学院,南京 21100;3.南通河海大学海洋与近海工程研究院,江苏 南通 226000;4.合肥同智机电控制技术有限公司,合肥 230000)
大自然中风向和风速是不断变化的,多台风力机组运行过程中,上游风力机产生的尾流不可避免会对下游风力机造成不利影响。增加各风力机之间的距离是最简单直接地避免风力机尾流干扰的方式,但在有限的风场内无限制增加间距显然不可行,这不但会增加并网成本,还会浪费土地资源。因此,要使多组风力机组提高运行效率进而提升整个风场的发电量,首先要对风力机变桨与偏航两种状态下的尾流特征进行探究。
偏航系统的主要功能是使风轮可以随风向的变化自动对准风向,实现风轮保护、自动对风以及自动解揽等功能。变桨是指风力机轮毂上的叶片借助控制技术和动力系统改变桨距角的大小来实现,控制风轮捕获的气动转矩和气动功率。王渊博等人[1-3]采用大涡模拟方法,基于致动线模型,利用OpenFOAM比较了9种风力机偏航控制,并结合流场参数分析了不同尾迹控制策略影响下游风力机的流动机理。MARIAN Draper等人[4]采用LES/ALM结合的方法对三台实验风力机进行分别转速控制以及偏航控制的数值计算,得出的结果能够较好的吻合实验数据。段鑫泽等人[5]将致动线模型与CFD方法相结合,利用大涡模拟方法研究了当上游风力机处于不同偏航角度时,两风力机之间的复杂尾流干扰效应,对比分析了偏航角度改变时,上下游风力机气动功率的输出特性,尾流速度变化以及风力机的尾流涡结构等。段鑫泽[6]采用致动线模型耦合大涡模拟方法,对上游风力机进行桨距角控制,对两台风力机的尾流抑制策略进行详细的数值模拟。研究结果表明:在风机运行过程中,存在一个最佳桨距角,能够使风力机的发电效率最大。
为进一步对风力机尾流特性进行研究,本文采用NREL5 MW风力机致动线模型并耦合大涡模拟方法对不同运行条件下风力机进行模拟计算,主要包括偏航两种角度(以+z为轴顺时针旋转10°和15°)、两种变桨角度(增大桨距角12°和减小桨距角8°)。
1 数值模拟方法
1.1 大涡模拟
1.1.1 大涡模拟控制方程
大涡模拟(Large eddy simulation)是在空间上对紊流脉动的平均,通过某种特殊的滤波函数将小尺度涡和大尺度涡分开。LES的基本思路是对全尺度涡的瞬时运动进行模拟,使用滤波函数将小尺度的涡过滤掉,并考虑小涡运动对大涡运动的影响,通过求解瞬时N-S方法来计算大尺度涡。
在有限体积法离散过程中,算法本身具有滤波功能,其滤波函数的表达式为:
(1)
式(1)中,F(x,x')为滤波函数;x为大尺度涡被过滤后的二维坐标;x'为在流动区域中的坐标;V为控制体积的大小。
(2)


(3)
经滤波函数处理后得到的不可压缩牛顿流体N-S方程为:
(4)
(5)
1.1.2 SM模型(SMAGORINSKY-Lilly model)
SGS模型由学者SMAGORINSKY最早提出[7],这是SM的雏形,与目前市面上的流体仿真软件使用的Smagorinsky-Lilly模型十分相似。其主要思想是将应变张量和应力张量相关联,如公式(6)所示:
(6)

(7)
湍流粘度计算公式如(8)所示:
(8)
(9)
式(9)中,CK为固定值1.5,此时计算得出的CS值为0.17。实际应用过程中发现CS值应更小,需按公式(9)来调整CS值的大小:
CS=CS0(1-ey+/A+)
(10)
式(10)中,CS0取默认值0.1;A+为常数,取25;y+为壁面网格的形心到壁面的最小距离。
1.2 致动线模型
致动线模型是将实体风轮叶片简化成致动线,在致动线上布置若干计算点,运用叶素动量理论对计算点处的气动参数进行迭代计算。能捕捉到风力机叶片的叶尖涡、叶根涡及风力机尾流中的涡螺旋现象是ALM的最大特点,每个计算点处叶素产生的气动力为:

(11)
式(11)中,vref为当地相对风速;c为弦长;ρ为当地空气密度;Cl、Cd为翼型升阻力系数;el、ed为升力和阻力方向上的单位向量。
为防止数值振荡,需要光顺函数将体积力光滑分布到周围的网格上,采用Gaussian光顺函数,其表达式:

(12)
体积力可以表示为:
fi=(fe×ηε(d))ei
(13)
式(12)~(13)中,fi为N-S方程中的源项;fe为体积力;d为fi与fe之间的距离;ei为升阻力方向的单位向量;ε为光顺函数长度尺度因子;从式中可以发现ε越大,体积力分布越平滑,体积力影响范围越大。
2 风力机模型及网格参数
2.1 风力机模型
本文以NREL5 MW风力机作为研究对象,NREL 5 MW风力机主要参数见表1。

表1 NREL 5 MW风力机主要参数
2.2 计算域与网格划分
计算域大小及边界设置如图1所示,整个计算域长、宽、高分别为13D、3D、3D(D为风轮直径),轮毂中心径向平面距离速度入口为2D,叶片中心坐标为(102,189,90)。为了节约计算时间,设置轴向方向为30 m,径向和竖直方向均设为180 m的长方体加密网格。叶片展向均分为28段,故每个叶素段长度为2.25 m,高斯分布参数设为1.6倍网格加密区尺寸,同时对风力机进行叶尖、叶根损失修正。
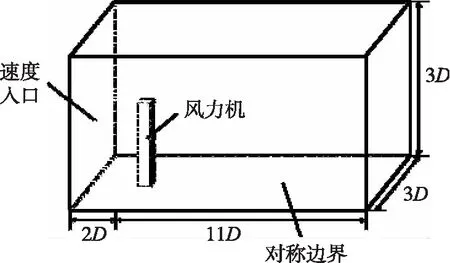
图1 计算域大小及边界设置
2.3 边界条件及湍流模型
模拟计算中,设置高斯分布参数ε为1.6,DX为3.6 m,边界条件设置方面,速度进口设定的x轴方向恒定入流速度(偏航时,U0=11.4 m/s;变桨时,U0=15 m/s);出口边界设置成压力出口;上下、左右边界均设置成对称边界。算法选择方面,选用大涡模拟中的SM模型亚格子尺度模型,模型的参数CS取0.1(默认值);选用大涡模拟PISO算法;且在单个时间步内,叶尖旋转距离必须小于加密区网格单元尺寸DX:即ωrdt≤DX,本小节中由实验风力机参数计算得到时间步长dt≤0.032 1 s,故选择时间步长为0.032 s。定义气体为不可压缩流体,采用二阶迎风格式来离散控制方程。
3 模拟结果及分析
3.1 修正模型验证
表2为实验测量与模拟计算的功率系数和推力系数的对比,从表2中可以看出,修正模型的结果与试验值较为接近,特别是推力系数。这是因为由于修正模型考虑了风力机的叶尖损失和叶根损失,使得载荷系数降低明显,从而计算出的推力值低于未修正模型。
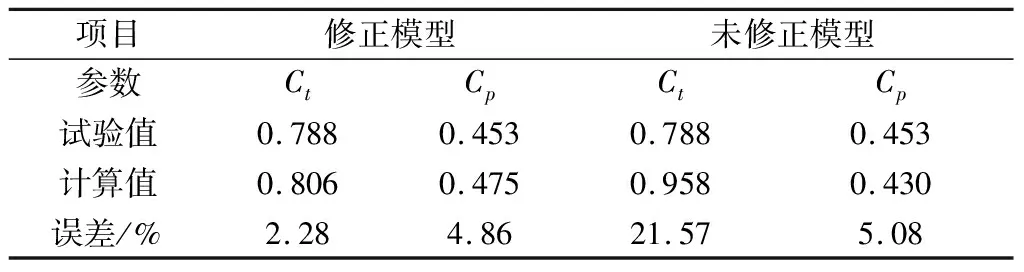
表2 实验测量与模拟计算的功率系数和推力系数的对比
为了进一步验证修正后模型的准确性和可行性,选取了距离旋转叶片下游2D位置处径向风速分布情况,并与试验数据进行对比,其结果如图2所示。从图2中可知,修正模型与试验值更加吻合。在尾流区2D处,未修正模型的计算结果与试验值相差不大,但修正模型既具有良好的模拟精度,还能较好模拟风力机尾流的风速衰减情况。

图2 尾流区2D位置处风轮中心径向速度分布图
3.2 偏航工况结果及分析
图3和图4分别为风力机处于偏航10°、偏航15°两种工况时,输出功率及推力随时间的变化曲线。从图中可以发现,偏航10°时,风力机的稳定输出功率约为4.81 MW,相对与额定功率5 MW来说,降幅达到3.8%;稳定时的轴向推力约为948 kN,偏航15°时,风力机的稳定输出功率约为4.68 MW,降幅达到6.4%;稳定时的轴向推力约为700 kN。由此可以看出,随着偏航角度的逐渐增大,风力机的输出功率和轴向推力都随之减小,并且偏航角度越大,其降低的幅度也越大。
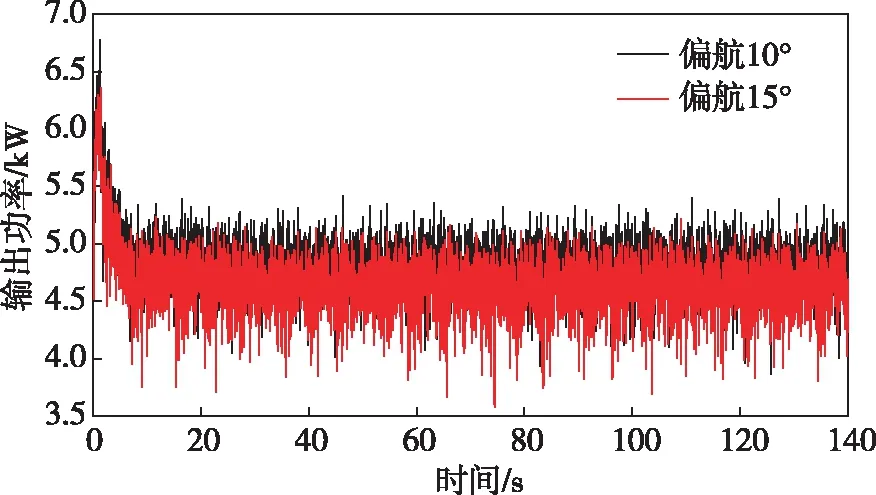
图3 输出功率随时间变化曲线

图4 推力随时间变化曲线
风力机偏航导致尾流严重亏损,这种亏损现象会对后方风力机造成严重的影响。图5为风力机处于未偏航、偏航10°和偏航15°三种工况时,经过轮毂中心高度处(z=90 m)处xoy平面速度云图。由图可知,未偏航工况下风轮对入流风的阻碍作用明显大于偏航工况。因此,风力机处于偏航状态时,可明显减弱对风阻碍,且随着偏航角度的增大,风力机尾流的速度亏损越严重,速度亏损的距离也越远。

图5 不同偏航角度轮毂中心xoy平面速度云图
图6为下游不同位置处的速度轮廓线,从图6中可以发现,未偏航时,尾流速度变化较快,相对于偏航工况,恢复至入流风速时,所需的轴向距离较长,速度恢复速率较快。偏航角度越大,在相同位置处尾流的恢复速度越快,尾随涡和脱落涡彼此之间相互影响,导致尾流的掺混程度提高,且这种现象在近尾流区表现的越明显。随着尾流向下游延伸,不同偏航角度对尾流速度恢复的影响逐渐减小。

图6 下游不同位置处的速度轮廓线
3.3 变桨工况结果及分析
图7为两种桨距角对风力机输出功率随时间的变化。从图7可以发现,通过改变攻角的大小,可以有效控制风力机的功率输出。当桨距角增大12°时,攻角减小12°,此时叶片翼型的升阻力系数随攻角的减小而下降,使大风速下风力机输出功率减小到额定输出功率5 MW以下,由图可知此时功率在4.52 MW附近。当桨距角减小8°时,攻角增大8°,此时风力机处于严重失速状态,升力系数减小,阻力系数增加,导致风力机输出功率下降至额定功率5 MW以下,由图可知此时功率在4.75 MW附近。受地表影响,风力机叶片在旋转过程中叶片攻角会连续变化,因翼型攻角较小时,升力系数随攻角线性变化,攻角增大时失速严重,升力系数变化较为缓慢,故桨距角增大12°和减小攻角8°相比,攻角变化幅度大体相同,但输出功率波动情况差异较大。综上所述,减小桨距角8°和增大桨距角12°两种工况在一定程度上可以有效的降低风力机的风能捕获,从而得到稳定的功率输出。
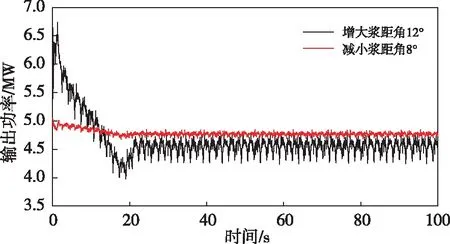
图7 两种桨距角对风力机输出功率随时间变化图
图8为不同桨距角下z=90 m处速度和涡量云图。由图8可知,未变桨工况下,风力机处于超额定风速运行时,会出现明显的涡脱落现象,涡量分布不规律,该状态下对风轮的破坏极大;当增大桨距角12°时,攻角减小12°,攻角较小,尾流向下游发展平缓,没有出现复杂的涡结构脱落现象,速度变化较小。当减小桨距角8°时,攻角增大8°,此时叶片失速严重,会有明显的分离涡产生,风力机产生的涡结构更加复杂,对尾流影响严重。

图8 不同桨距角下z=90 m处速度和涡量云图
4 结语
(1)风力机处于偏航状态时,可明显减弱对风阻碍,且随着偏航角度的增大,风力机尾流的速度亏损越严重,速度亏损的距离也越远。偏航角度越大,在相同位置处尾流的恢复速度越快,尾随涡和脱落涡彼此之间相互影响,导致尾流的掺混程度提高,且这种现象在近尾流区表现的更明显。
(2)改变桨距角在一定程度上可以有效的降低风力机的风能捕获,从而得到稳定的功率输出。且增大桨距角12°时,攻角减小12°,攻角较小,尾流向下游发展平缓,没有出现复杂的涡结构脱落现象,速度变化较小;减小桨距角8°时,攻角增大8°,此时叶片失速严重,会有明显的分离涡产生,风力机产生的涡结构更加复杂,对尾流影响严重。
