绳驱超冗余机械臂减磨设计与实验研究
2022-03-01周青华
杨 强,周青华
(四川大学 空天科学与工程学院,四川 成都 610065)
0 引言
随着航天技术的发展,以空间机械臂为载体的在轨服务等技术成为了航天领域研究热点之一[1,2]。然而传统的刚体机械臂由于体积大、灵活度低、工作空间小,难以满足日益复杂的空间环境作业任务需求[2]。绳驱超冗余机械臂是指具有狭长外形、自支撑能力并具有大量自由度的一类依靠绳索传动的机械臂。与传统刚体机械臂相比,绳驱超冗余机械臂具有狭长灵活、工作空间大等特点[3],因而逐渐成为未来复杂航天任务需求的重要潜在工具[4]。
绳驱超冗余机械臂根据其结构特征可以分为两种类型:连续型脊柱和刚性连杆脊柱[5]。Kim 等[6]首次提到了具有连续型脊柱的绳驱超冗余机械臂,将它定义为一种关节数量接近无穷且连杆长度趋于零的机械臂。Yeshmukhametov 等[7]提出了一种具有被动预紧机构的绳驱机械臂,避免了由于绳索张力变化致使机械臂运动失稳的问题。同连续型脊柱类机械臂不同,具有刚性连杆脊柱的绳驱超冗余机械臂使用一定的刚性连杆和运动关节相互串联以实现近似的连续性[8]。英国OC Robotics 公司成功地将该种类型机械臂应用于核反应堆的检查和原位修复[9]。Liu 等[10]提出了一种绳索主动驱动-被动联动分段的机械臂,其主要由10 个刚性连杆和运动关节构成,在保证机械臂骨干曲线曲率连续的情况下,提升了绳驱机械臂的刚度和负载能力。但是在实际工程应用中,无论哪一种类型的绳驱机械臂都面临一个共性问题,即绳索在驱动传动过程中和穿线孔的摩擦导致传动效率低,并进一步影响机械臂运动精度[11]。
针对目前绳驱超冗余机械臂在运动过程中的绳索传动摩擦问题,提出一种具有低摩擦特性的绳驱超冗余机械臂新型结构。通过机械臂驱动基座和关节的设计优化,降低绳索和穿线孔间的摩擦力,提高机械臂的运动精度和传动效率。并且搭建实验平台进行绳驱超冗余机械臂绳索传动摩擦磨损实验研究,分析绳索在传动过程中摩擦磨损规律。进一步搭建机械臂样机进行整机实验验证分析,验证优化设计的合理性。
1 绳驱超冗余机械臂结构设计
1.1 整体设计
绳驱超冗余机械臂整体结构主要由关节执行机构和基座驱动机构两部分组成,如图1 所示。机械臂驱动绳索从基座箱体内部穿出,依次通过执行机构关节穿线孔并固定。以滚珠丝杆为核心的传动模块通过对绳索的拉扯和释放完成关节弯曲等动作,从而实现机械臂在空间中的操控。

图1 绳驱超冗余机械臂结构
执行机构可以看作由6 个运动关节通过中空连杆依次串联组成的拥有12 个自由度的机械臂,主要包括中空连杆、布线圆盘和运动关节,其中每个运动关节具有俯仰和偏转2 个正交自由度。驱动绳索由于其柔性特征只能传递拉力,因此单个运动关节至少需要3 根绳索才能实现在三维空间的任意方向运动,并且3 根绳索间呈120°均布穿过关节一端布线圆盘,固定于下一关节相邻布线圆盘。
驱动机构主要由电机、驱动器和传动模块组成。驱动绳索的拉扯和释放通过传动模块实现,各驱动绳索与对应传动模块上滑块固连。为了检测驱动绳索驱动力,每个传动模块上布置有拉力传感器。同时拉力传感器还可以检测机械臂在初始位置时绳索的初始张力,由此调整控制程序中电机的旋转位移,以优化绳索初始张力对机械臂运动精度的影响。
1.2 绳索传动减磨优化设计
绳索在传动过程中摩擦磨损主要集中在两个区域:绳索和机械臂关节布线圆盘穿线孔之间接触区以及绳索和机械臂基座穿线孔之间接触区。对于第一类区域,提出在关节布线圆盘穿线孔处布置直线轴承,如图2(a)所示。直线轴承改变了绳索和布线圆盘穿线孔间摩擦方式,由原来的滑动摩擦变为滚动摩擦,因此预期可极大降低摩擦力。对于绳索和机械臂基座穿线孔间的摩擦区域,提出在驱动基座上布置滑轮组对绳索穿离基座时进行导向,并平行引导至关节的布线圆盘处,如图2(b)所示。改进后的结构由于滑轮组导向作用使得绳索是平行穿离基座的,一方面可以降低绳索和滑块间倾覆力矩从而提高丝杆运动稳定性,另一方面可以降低绳索和基座间摩擦力。

图2 机械臂减磨设计结构
2 绳驱超冗余机械臂摩擦磨损实验研究
2.1 绳索传动摩擦磨损试验机
绳索传动摩擦磨损试验机主要由往复运动试验平台和加载模块两部分组成,如图3 所示。其中加载模块(借助布鲁克UMT TriboLab 多功能摩擦磨损试验机)主要功能是提供竖直加载力和测量切向力,往复运动实验平台是根据实验要求自主设计搭建的绳索往复运动机构。
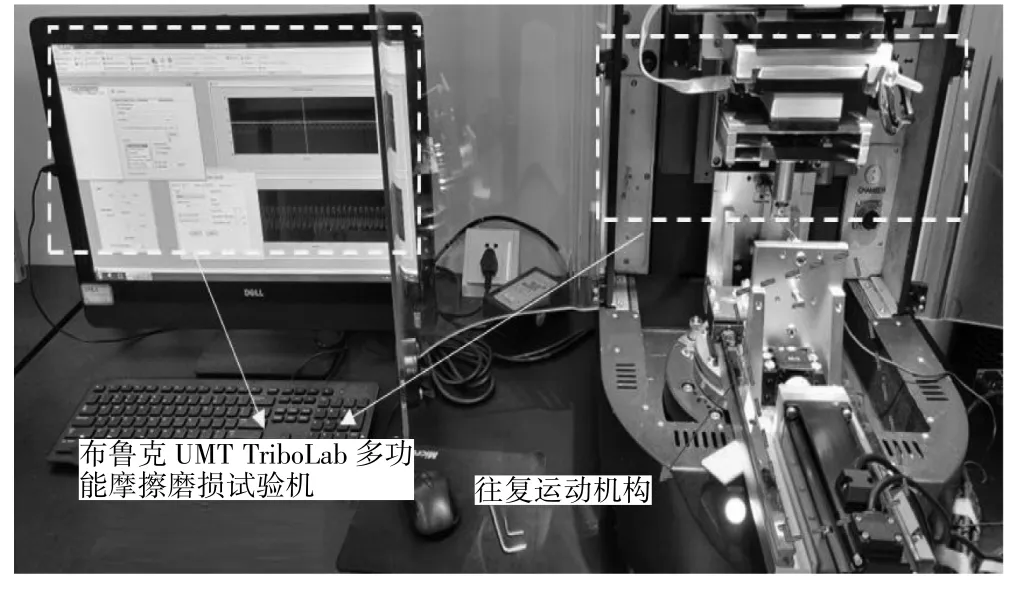
图3 绳索传动摩擦磨损试验机
2.2 绳索传动摩擦磨损试验方法
实验中绳索往复运动机构在多功能摩擦磨损试验机中的安装布局如图4 所示。首先在往复运动机构上固定安装好钢丝绳,然后通过UMT TriboLab 多功能摩擦磨损试验机加载模块进行法向加载,利用其自带二维力传感器测试钢丝绳与对摩副往复摩擦过程中的法向加载力与切向力,并计算出相应摩擦系数。

图4 往复运动试验平台
2.3 绳索传动摩擦磨损试验结果分析
机械臂驱动绳索选用304 材质钢丝绳,利用绳驱超冗余机械臂进行绳索张力测试。经测试,在末端2 kg 负载作用下,绳索传动初始拉力为100 N 时,机械臂的负载和刚度处于较为理想状态。首先开展滑轮和钢丝绳之间摩擦磨损实验,验证绳索和基座穿线孔间结构优化的合理性。钢丝绳张力控制在100 N,通过UMT TriboLab 多功能摩擦磨损试验机控制加载模块压入不同角度(选取了10°和15°)模拟钢丝绳(直径2 mm)实际服役过程中发生弯曲的状态。往复运动试验机构线速度V=8 mm/s,单向运动位移20 mm,实验往复次数1200 次。
测试得到的滑轮和钢丝绳在不同压入角作用下的摩擦系数变化如图5 所示。与优化前钢丝绳与基座线孔直接接触摩擦相比,由于结构上的优化,将绳-孔间偏向滑动接触变为直线平行滚动接触,摩擦系数得到极大的改善。稳定摩擦系数由优化前的0.4592 分别降至0.09(10°压入角)、0.06(15°压入角)。
钢丝绳表面磨损后的轮廓如图6 所示。结构优化前的设计,钢丝绳磨损较为显著,表面有明显磨平现象。采用滑轮与钢丝绳的滚动摩擦优化设计后,不论在10°还是15°压入角作用下,相较未磨损前表面磨损都比较小,大致只有优化前结构磨损量的一半左右。

图6 滑轮减磨结构下钢丝绳磨损量
同样针对绳索和布线圆盘穿线孔结构优化方案,开展直线轴承和钢丝绳之间摩擦磨损实验。测得的直线轴承和钢丝绳在不同压入角下的摩擦系数变化如图7 所示。与滑轮方案类似,由于结构上的优化,将滑动接触方式变为滚动接触,摩擦系数相比于优化前的结构同样得到极大改善(远小于0.4557),稳定摩擦系数分别降至为0.08(10°压入角)、0.09(15°压入角)。进一步可以得到钢丝绳表面磨损轮廓曲线(图8),同样证实绳索和布线圆盘穿线孔结构优化方案可以起到明显的减摩效果。
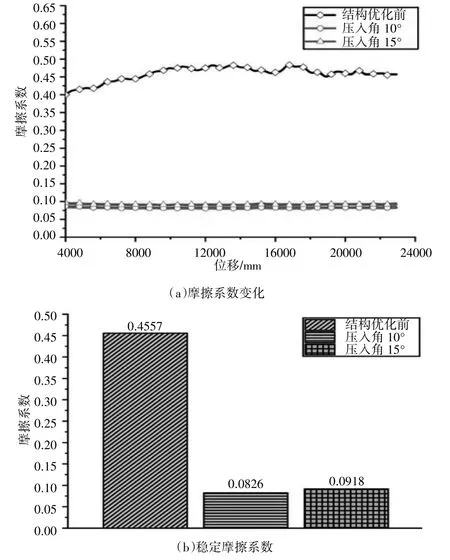
图7 轴承和钢丝绳间摩擦系数

图8 轴承结构减磨下钢丝绳摩损量
综合钢丝绳与滑轮及直线轴承两种情况的摩擦磨损实验可以看出,通过结构优化,在驱动端实现钢丝绳直线滚动出线,在执行端关节上实现滚动接触,可以有效降低绳索传动摩擦系数和磨损量,由此可提升绳索传动效率及服役寿命。
3 绳驱超冗余机械臂样机实验
基于前文结构优化设计,设计研制出具有低摩擦特性的绳驱超冗余机械臂实验样机,主要可以划分为执行机构、驱动机构和控制器三个模块。如图9 所示,利用样机开展了多关节重复运动实验,实验过程中,机械臂多关节协同运动性好,执行端弯曲特性良好。经500 次重复运动,各关节钢丝绳运行正常,且表面无明显磨损,如图10 所示。实验结果表明机械臂系统关节运动能力正常,同时再次证实了所提减磨优化设计的合理性。

图10 绳驱超冗余机械臂样机实验各关节磨损表面形貌
4 结语
设计的一种6 关节12 自由度绳驱超冗余机械臂,提出的机械臂结构优化设计以降低绳索传动过程中摩擦力进而提高机械臂整体性能。设计了机械臂绳索传动摩擦磨损试验机,实验证实结构优化后绳索传动摩擦系数和磨损量得到显著改善。研制出具有低摩擦特性的绳驱超冗余机械臂样机,开展了多关节重复运动实验。实验过程中机械臂系统关节运动能力正常,进一步验证了所提减磨优化设计的合理性。
