爬树修枝机器人稳定性分析
2022-02-28崔正民
【摘要】近年来为了推动我国林业可持续发展的工作,速生林变为主要培育对象。速生林的修剪维护工作也成为林业工作的重要项目之一,人工修剪速生林存在着危险性高、成本高等缺点,本文设计一种以麦克纳姆轮作为驱动轮可以在树上爬升并且具有周向旋转实现避障的爬树修枝机器人,主要对机器人爬升机构的爬升运动和周向旋转运动进行ADAMS分析,验证其运动可行性和稳定性。
【关键词】林业;机器人;ADAMS分析;麦克纳姆轮;
引言:速生杨树品种在我国北方人工造林工程建设中起到很大作用,所以速生杨树的栽培和维护就变得尤为重要[1]。修枝工作影响着树木的生长[2],速生杨树的修剪从造林第1年开始进行整枝,持续到3~5年树干高度为10~14m并且8m以下树干通直圆满[3]。在3~5年时树干高度变高,工人工作危险性就变高,工作效率也变低。虽然我国的林业产业使用林业机械的频率逐渐提高,但存在的问题是林业机械发展空间相对较小,使得很多林业工作效率低,而且许多林业机械存在着体积大、成本高、不便于维修、对工人依赖性大等缺陷[4-5]。这就急需一种轻便、操作简单、工作效率高的设备来减少工人工作量和高空作业的危险性[6]。本文主要对爬树修枝机器人直线爬升和周向旋转两个运动进行分析,进行ADAMS仿真验证运动可行性和稳定性。
1爬树修枝机器人的运动原理
1.1爬树机器人的结构
爬树机器人分为四种爬升方式,分别是环抱式、爪式、抓握式、表面附着式,其中环抱式爬升方式最为稳定,所以本文选用环抱式爬升方式,通过8个麦克纳姆轮驱动带动爬树机器人爬升,每个麦克纳姆轮都有单独电机进行驱动,机构通过拉簧拉紧上下驱动轮架进行对树木的夹紧,树木修枝通过电机带动修枝剪刀进行修枝。
1.2麦克纳姆轮的运动分析
由于本设计爬树修枝机器人选用麦克纳姆轮作为驱动轮,而麦克纳姆轮分为左旋轮和右旋轮,每个麦克纳姆轮都有8个小辊子,所以需要通过正确的排列组合才可以实现理想的运动。
2爬树机器人的ADAMS仿真
多体动力学是指其研究对象为多个刚体或柔性体通过一定的约束关系相互连接并进行有某种相对运动的一门学科[7-9],以经典力学为基础,多体动力学逐渐发展起来,在机械运动学及动力学领域有着广阔的应用价值和前景。其中ADAMS是目前工业和科研领域应用最广泛的多体动力学软件[10-11]。
2.1ADAMS仿真步骤
本章进行爬树机器人垂直爬升和周向旋转两种工况分分析,并且在垂直爬升时设置了高度为10mm和15mm凸起障碍。在仿真前需要进行模型简化、参数设定、载荷和驱动的添加,设置完成后如图2-1所示:
2.2仿真结果分析
(1)垂直爬升结果分析
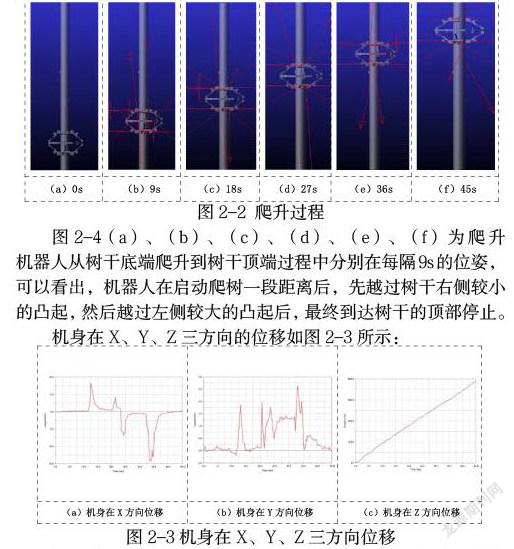
直线爬升时,机器人从树干的底部启动,沿着树干匀速爬升越过两处凸起,最终到达树干的顶部停止,爬升过程如下图2-2所示。
图2-4(a)、(b)、(c)、(d)、(e)、(f)为爬升机器人从树干底端爬升到树干顶端过程中分别在每隔9s的位姿,可以看出,机器人在启动爬树一段距离后,先越过树干右侧较小的凸起,然后越过左侧较大的凸起后,最终到达树干的顶部停止。
机身在X、Y、Z三方向的位移如图2-3所示:
在垂直爬升运动时,X正方向最大有7.8mm的位移,负方向有-13mm的位移,这是机器人越过不同高度凸点时机身产生的位移。Y正方向最大有2.7mm,负方向为-0.2mm,这是由于机器人越过凸点时机身发生侧偏导致的。Z方向上略有波动但是整体上爬升较为稳定。
(2)周向旋转结果分析
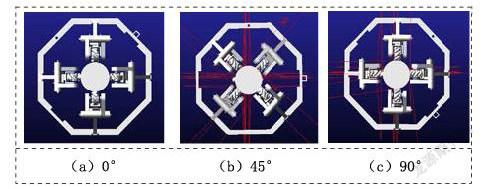
周向旋转有顺时针转动和逆时针转动两种模式,由于两种模式动力学特性相似,因此为了避免累赘,本节只针对顺时针转动的过程进行介绍和分析,顺时针转动过程如图2-4所示。
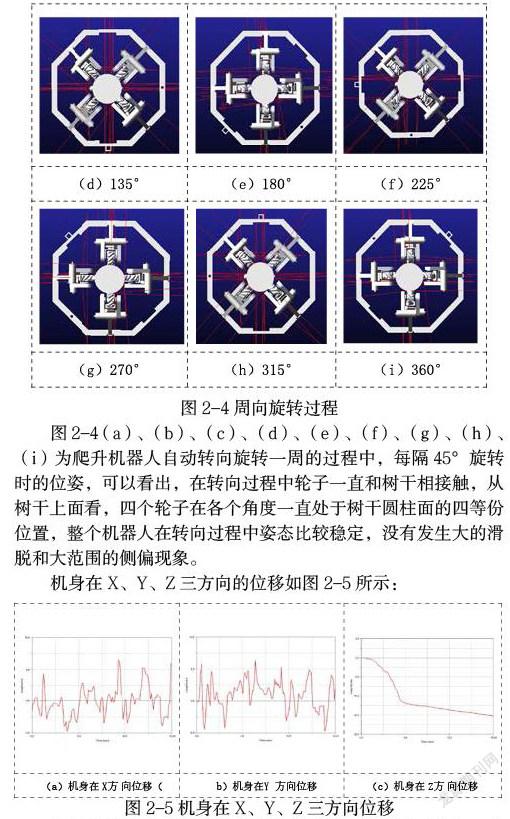
图2-4(a)、(b)、(c)、(d)、(e)、(f)、(g)、(h)、(i)为爬升机器人自动转向旋转一周的过程中,每隔45°旋转时的位姿,可以看出,在转向过程中轮子一直和树干相接触,从树干上面看,四个轮子在各个角度一直处于树干圆柱面的四等份位置,整个机器人在转向过程中姿态比较稳定,没有发生大的滑脱和大范围的侧偏现象。
机身在X、Y、Z三方向的位移如图2-5所示:
爬树机器人实现周向旋转功能用时约15s左右,机身质心的位移在机器人转向的过程当中均随着转向动态波动,范围±5mm,质心位移最大为7mm左右。在Z方向上,0-4s时机器人质心具有滑脱现象,滑脱位移为15mm,这是因为机器人刚启动,处于加速阶段还不稳定,在5s之后,机器人状态稳定,位移趋于稳定。
3结论
本文对于爬树修枝机器人的结构进行设计,通过工作要求设计了爬树机器人结构的各个部件,将麦克纳姆轮运用到了爬树机器人上并且通过麦克纳姆轮的运动原理进行了正确排序,最后对爬树机器人机构进行ADAMS仿真,验证了运动的可行性和稳定性。
参考文献:
[1]屈传坤,王艳春.如何提高北方速生杨的栽培技术与对策[J].农民致富之友,2019(06):200.
[2]秦柱南,孙超,韩义,曹帮华,马永升,贾波.株行距配置对杨树生长及光合特性的影响[J].山东大学学报(理学版),2014,49(07):1-6.
[3]王海祥.林业机械在林业产业中的作用及发展建议[J].农技服务,2021,38(07):130-132.
[4]尹吉远,靳可心,刘程程,傅可艺,王超,邢艳秋.树木修枝机械的研究综述[J].中小企业管理与科技(下旬刊),2021(03):135-136.
[5]杨光,张长青,杨建华,白彡.枝桠修剪设备发展现状与需求分析[J].木材加工机械,2016,27(05):49-51.DOI:10.13594/j.cnki.mcjgjx.2016.05.013.
[6]李春高.我国造林机械的现状及发展趋势[J].林业机械与木工设备,2012,40(10):4-6+10.
[7]贺朝霞,马跃飞,常乐浩,任琛.基于多体动力学与颗粒动力学耦合的挖掘载荷计算与研究[J].机械设计与制造,2021(06):266-269.
[8]蒋万里.基于线驱动柔性机械臂的多体动力学特性研究[D].大连理工大学,2021.
[9]何咸荣,潘嘹,卢立新,林自东,厉夫满.基于ADAMS的无菌砖型包装机预成型机构动态仿真[J].包装与食品机械,2021,39(03):63-67.
[10]卢宁,韩崇瑞.基于ADAMS刚柔耦合模型的塔式起重机起重臂疲劳寿命分析[J].机电工程,2021,38(08):1003-1009.
[11]張久雷.基于Adams的六足直立式步行机器人运动仿真分析[J].机械传动,2020,44(08):147-152.
作者简介:崔正民,1997.09,男,吉林省延边朝鲜族自治州安图县,朝鲜,硕士,研究方向:机械
