SDR 探地雷达在煤矿开采中的应用
2022-02-27乔帅克李国民韩晓冰
乔帅克,李国民,韩晓冰
(西安科技大学通信与信息工程学院,陕西西安 710054)
探地雷达(Ground Penetrating Radar,GPR)是一种地下目标体探测技术,被广泛应用于科研或实际工程中[1-3]。通过发射电磁波检测目标,以便提前了解地下环境,探测深度可达几十厘米甚至几百米[4-6]。在工程中,探地雷达常用来定位和测距。
软件无线电(Software Defined Radio,SDR)是一种新型的无线电体系结构。其可以通过软件编程在不改变硬件电路的情况下改变功能[7-9]。调频连续波(Frequency Modulated Continuous Wave,FMCW)雷达,设计简单,使用低发射功率[10-12]。使用软件无线电技术的FMCW 雷达,可通过软件操作实现功能,在实现设计的前提下,降低了系统的复杂度。
综上,将软件无线电与FMCW 的特点相结合,为解决探地雷达功能单一化、结构大、造价昂贵的问题提供了一种方案。
1 探地雷达理论基础
探地雷达采用的高频电磁波频率范围通常在1 MHz~6 GHz 之间,以特定的形式通过天线发射来探测[13]。大部分探地雷达使用反射探测法,如图1所示。
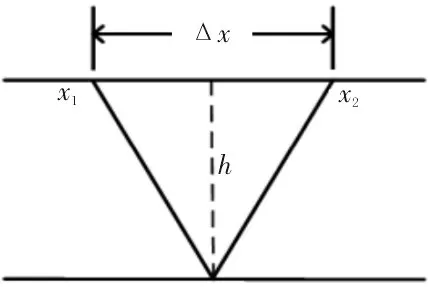
图1 探地雷达探测原理图
根据地下特征,探地雷达波从发射到接收的时间可由以下公式得到:

其中,Δx代表发射天线x1与接收天线x2的直线距离,h为地下探测物的深度,电磁波在其中的传播速度用v表示,电磁波从地面发射到接收的时间为t。v可根据已知材料估计,或通过以下公式计算:

c代表电磁波传播速度,为3×108m/s,εr为物质的相对介电常数。可使天线按一定的间隔在测量的位置移动并检测移动前后的数据,用该方法也可得到v:

Δ 代表天线按照一定间隔移动的距离,t1、t2分别表示天线移动前后发射电磁波到接收电磁波所需要的时间。
介质的介电性能对探地雷达波的传播起决定作用,且不同的物质目标拥有不同的介电性能,煤矿所在区域中,探地雷达波会到达包含不同岩层的区域。由于不同区域的岩层成份和煤质不同,其介电性能也有比较明显的差异。介电性能主要有3 个参量,其共同影响着电波的传播。根据这些特性上的差异,探地雷达才可以对目标介质进行识别[14]。常见介质的电磁波参数如表1 所示。
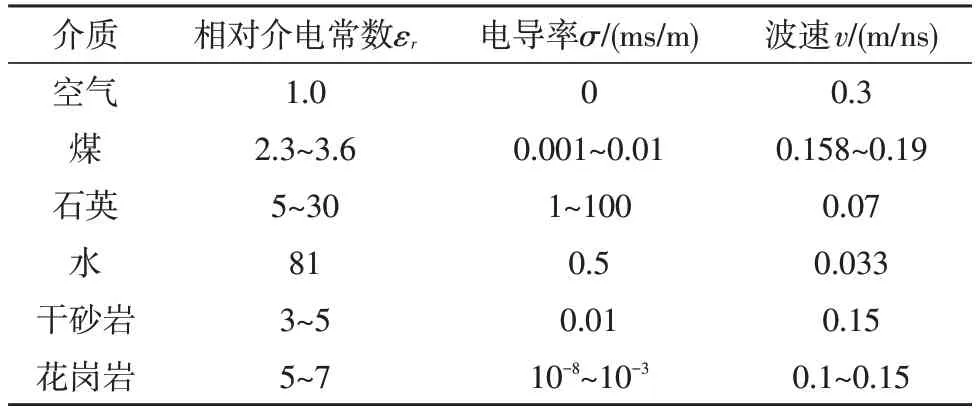
表1 几种常见介质的电磁波参数
2 FMCW雷达信号分析
探地雷达目前在时域中获得了广泛应用,国内大多数雷达都为时域雷达。它的探测原理是通过天线发射脉冲雷达信号,并接收高频脉冲信号反射后产生的回波信号。用Pm表示脉冲产生时的平均功率,每个周期中产生的平均功率为Pa。信号形式为矩形波,τ代表脉冲宽度,T为脉冲的一个周期,那么就有:

其中,fr=1/T为脉冲的重复频率,雷达工作比可以表示为τ/T=τfr,对于传统脉冲雷达而言,脉冲宽度τ为1 μs,功率Pm为1 MW,工作比为0.001,即每1 ms 发送一个脉冲。发射机发送一个脉冲持续时间为1 μs 的信号,接收机的响应时间为0.999 ms。因此,每个周期的平均功率是1 kW。
频域雷达是通过FFT 获得信号时间频率关系的雷达,其特点是信号收发都在频率域进行。主要分为FMCW 和步进频率雷达两种。该文采用了前者,其主要是根据其在连续扫描周期之后,信号的发送频率与回波的发送频率之间存在差异,测量频率差计算就可获得目标与雷达之间的相关信息[15]。发射波与接收波频率差混频后的信号称为差拍信号,差拍信号的频率较低,用硬件处理数据和信号也相对简单。连续波雷达调频方式也有多种,例如三角波调频、锯齿波调频等,该文使用了锯齿波调频。锯齿波线性调频时电磁波的频率、时间关系如图2 所示。

图2 FMCW雷达发射波和反射波的频率-时间关系图
如图所示,图中fo为起始频率,BW为调频带宽,Tb为调频周期,τ为雷达发射波与接收到的反射波之间的时间差,fb为频率差。若用Vt(t)表示雷达的发射信号,Vr(t)为雷达的接收信号,FMCW 雷达差拍信号的表达式为:

探测目标与地面上雷达的距离用R表示,c为光速。接收信号的延迟表达式为:

结合以上两个公式,可以得出如下关系式:

由式(7)可知,距离和拍频频率的关系。FMCW雷达测距实际上是对参数fb的估计。传统FMCW雷达通常采用频谱分析的方法来对差拍信号的频率进行估计。首先,以fs采样频率对差拍信号采样,然后通过离散傅立叶变换(Discrete Fourier Transform,DFT)处理采样序列,采用FFT 计算差拍信号的离散谱。离散傅里叶变换的频率分辨率为Δf,FMCW 雷达也被ΔR限制,Δf与fs和采样点数N有关,在一个调频周期内当N取最大值时有:

根据式(7)与(8)可得距离分辨率的数学表达式如下:

3 SDR探地雷达系统设计与实现
3.1 参数选择
该文设计的SDR 探地雷达是为了消除煤矿开采过程中存在的安全隐患,这就要求其不仅能检测出物质的存在,而且还要检测其种类[16]。煤层超前探测中,探地雷达的任务就是探测电磁波发射回来的回波信号,确定目标位置,以及对回波信号带回来的信息进行分析,即目标识别,这也对探测过程中参数的选择有一定要求。
最重要的是中心频率的选择,中心频率受探测目标的厚度和介电常数等影响。目标厚度为r,目标介质的相对介电常数为εr。中心频率fr的约束公式如下:

假设所需探测深度为d,中心频率fd的约束公式如下:

考虑该雷达的应用场景及其对距离的要求,以及中心频率与深度的关系,该文选择扫频带宽为200 MHz,确定出合适的扫频频率范围为100~300 MHz,根据式(7)可知,频率与距离的对应关系由雷达的发射信号的扫频带宽与扫频周期决定,扫频带宽不变的情况下,扫频周期越短,单位频率对应的距离越小,频偏估计精度相同时,测距精度越高。
3.2 系统结构设计与实现
该文要完成的目标是利用通用SDR 硬件平台USRP B210 和GNU Radio,结合地质勘探技术和软件无线电技术,实现复杂度低、成本低的FMCW 雷达。通过它可以在低成本下分析和研究通信系统,通过PC 控制收发,并可随时调整参数。该软件系统采用GNU Radio 软件在Ubuntu 环境下进行编写,在GNU Radio 提供的可视化界面中进行模块搭建、连接、测试以及代码编写、修改,以完成目标[17]。
FMCW 雷达发射连续载波,载波由周期函数调制,即锯齿波或正弦波提供距离数据。FMCW 探地雷达系统框图如图3 所示。

图3 FMCW探地雷达系统框图
3.2.1 FMCW雷达信号发射、传输
线性调频信号发生器在发射机和接收机的混频器输入端起到信号源的作用。图3 所示的信号发生器中会包含一个压控振荡器(VCO),用来控制震荡频率,它通过DAC 后产生输出电压。利用混频器作为乘法器,将来自LNA 的信号与参考信号混合。来自混频器的高频信号被低通滤波,以减少计算负载。载波信号通过周期性的线性信号调制,得到FMCW波形。
FMCW 雷达使用的元器件有拍频发生器、发射机、接收机、混频器。USRP 通过PC 提供发射信号,再经过USRP 的天线发送至外界。在PC 上使用GNU Radio 设计FMCW 信号源,Signal Source 用于产生锯齿波信号,用VCO 对其进行调频,产生差拍信号。在未连接USRP 设备时,选择Throttle 模块可以限流,保证CPU 正常工作。传输的信号为复数的形式,采用Hibert 模块将信号转换为复数形式。UHD:USRP Sink 模块就可在GNU Radio 中将信号通过硬件发射出去。发射部分程序如图4 所示,产生的信号通过USRP 发射端的天线发射。
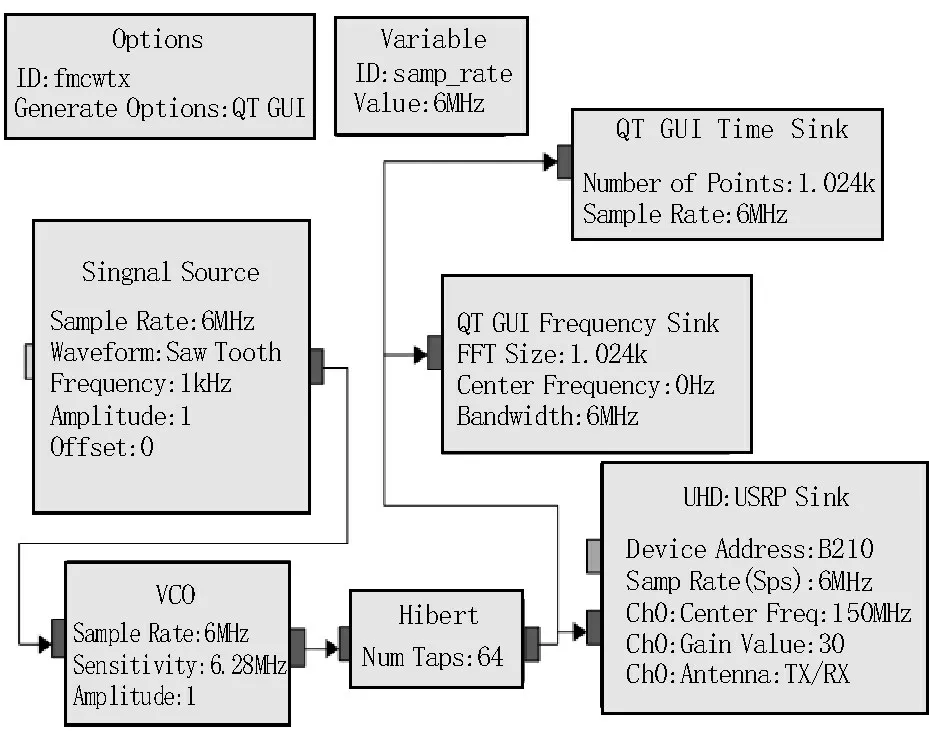
图4 FMCW雷达发射部分图
利用上述方式能够在PC 上产生一个发射信号,运行程序就可在软件示波器上看到调制后的连续调频波信号,如图5 所示。
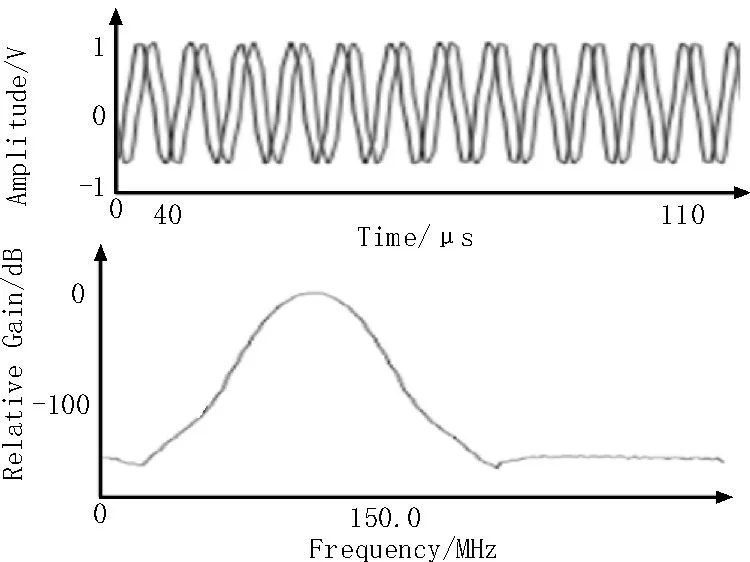
图5 连续调频波信号波形
整个过程中PC 或者说GNU Radio 的主要工作是控制信号的产生,控制其传输到USRP 中被USRP Sink 模块接收。硬件在调制和上变频过程后通过A/D 转换器转换为模拟信号。通过功放增加其传输功率后从发射天线发射出去。信号被发射和散射,一部分信号传输回地面,通过GNU Radio 中的信号显示模块进行显示。
3.2.2 接收机接收回波信号
UHD:USRP Source 模块负责将经过USRP 天线预处理后传输过来的信号显示在软件中。复数类型的数据会显示实部以及虚部,不利于观察和测量。所以需要将数据的类型改变成实数型(Real),可以采用GNU Radio中负责数据转换的Complex to Real模块将数据的类型转换为实数型。发射的脉冲信号也是实数信号,所以只需将实部连接到示波器上,运用数据转换模块使数据可以随意转换成想要的数据。
如图6 所示,接收端模块经过USRP 接收射频信号进行前端预处理(例如数字下变频等)后,通过UHD:USRP Source 模块,使用Multiple 模块与发射信号相乘,最后在QT GUI Time Sink 模块中就可以将接收到的波形显示出来。为了使结果更容易被观察到,通过连接一个低通滤波器模块来滤除噪声的干扰,最后连接一个File Sink 模块将数据存储起来方便后续处理。同时被测目标准确度也取决于天线增益、中心频率等因素。

图6 FMCW雷达接收部分图
4 测试结果及分析
该文使用USRP B210 平台实现了雷达系统的原型,传统的无线电设备以及通用平台的连接都需要进行一些处理才可以连接成功,从而进行通信,而文中所使用的USRP B210 可通过USB 接口与具有GNU Radio 开源软件无线电平台的电脑通信。
将硬件平台与电脑连接好后,从结果中可以明显看出,FMCW 雷达可以检测出拍频形式的目标。单个目标在时域中的信号以及在频域中的信号,如图7、8 所示。单个峰值是混频产生的拍频,它由目标范围决定。应当注意,对于单个目标,差拍信号将具有与其反射率和范围相对应的单个频率。
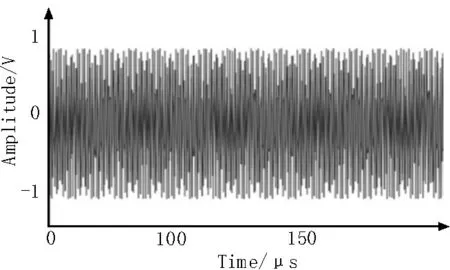
图7 单个目标信号时域图
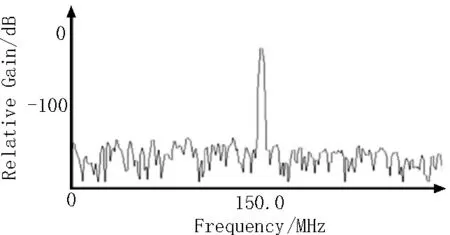
图8 单个目标信号频域图
对于多个目标,存在更复杂的差拍信号。流程图中两个带延时元件的不同目标在不同间隔产生传播延迟的差拍信号,多目标信号时域图如图9 所示,多目标信号频域图如图10 所示,这些信号被延迟了300、1 500 和2 500 个采样点。图中的3 个峰值对应的是3 个具有不同时延的目标。理论上,3 个峰值的频率振幅应该是相同的,但在FMCW 雷达系统中,由于偏置和非线性的原因导致了振幅的不均匀。

图9 多目标信号时域图

图10 多目标信号频域图
分析图9、图10 可看出,相较于发射端,信号振幅有所衰减,但信号不失真,由于使用一台设备同时收发信号,信号从发射到再反射回原点为同一位置,即重复这个过程时每次所用的时间都是不变的,所以波形结果也是周期性的。
5 结论
软件无线电有着巨大的潜力和商业价值,软件无线电的优势体现在其丰富的接口支持和成熟的多模式终端设备,其通信型结构模块和互操作性更是传统无线电系统无法比拟的,将来的无线电系统将有更多的可能[18]。该文旨在介绍一种利用软件无线电技术设计探地雷达的思路,将通用软件无线电外设USRP B210 和软件无线电开发平台GUN Radio 结合,完成了目标的探测。FMCW 雷达的扫频频率范围为100~300 MHz,发射信号选择锯齿波。分析和实验结果表明,该系统可减少现有探地雷达的体积,有助于减少开发周期、降低成本,为SDR 探地雷达系统的设计提供合理的方案。
