互联互通框架下的地铁信号集中监测系统设计
2022-02-27贺昌寿
王 磊,贺昌寿,尤 刚
(1.成都地铁运营有限公司,四川成都 610000;2.中国铁路成都局集团有限公司,四川成都 610000;3.四川网达科技有限公司,四川 成都 610000)
地铁是城市交通的主要运力,其安全性也越来越得到重视。轨道信号是能反映地铁运行状态的最重要信息,轨道交通信号集中监测系统作为交通网络的中枢神经,是提高运输效率的首要一环,对此,文献[1]分析了延伸线路采用统一信号系统,采用互联互通信号系统接入既有技术方案,得出当前互联互通信号系统在既有线延伸段工程中的适用性的结论。文献[2]以典型的互联互通CBTC 轨道交通信号系统为研究对象,提出了采用车载兼容、信号显示趋同化的近期互通方案,为市郊铁路信号系统互通性设计提供参考。
但是以往研究的地铁信号互联互通系统还存在着很大不足,如响应时间慢、实时性低、监测距离不达标等。同时,基于互联互通的CAN 总线监测方法因结构简单,性价比高,被认为是最有前景的信号监测方法,广泛应用于各控制系统中的信号监测和通信。所以,文中在互联互通框架下,设计了地铁信号集中监测系统,旨在提高信号监测的实时性与监测性能。
1 系统架构设计
图1 为地铁实现互联互通的整体架构。

图1 地铁实现互联互通的整体架构
在图1 中,将架构分为三级:车站级、线路级、城市级。
车站级:包括ZC、ATS(ATP/ATO)、VOBC、CI、视频缺口、计轴、微机监测、电源屏等子系统以及站上MSS 维护终端和微机监测维修机。
线路级:包括各线路集中数据中心和维护支持子系统。
城市级:包括互联互通数据中心、维护工作站、移动终端等[3-6]。
在图1 的支持下,地铁信号集中监测系统需要具备数据采集、通信和串口通信等功能,所以文中优化设计了数据采集和数据传输两部分,系统结构如图2 所示。

图2 互联互通框架下的地铁信号集中监测系统硬件结构
由图2 可知,在构建基于互联互通的信号监测系统时,需要考虑到系统本身的实时性、可靠性,因此,通过物理介质冗余设计来提高系统稳定性,逐一优化地铁信号集中监测系统硬件结构。
1.1 CPU设计
CPU 搭载16/32 位ARM7TD 芯片系统,具有较高的计算性能。CPU 结构由定时器维护,通过缓冲寄存器和数据总线对数据进行判断。程序计数器PC端保持实时工作界面,以确保命令控制的实时性,通过命令循环保证监控数据的有效性。为确保最大时钟速度下的32 位代码能够正常工作,采用独特的加速模块,设接口位宽为128 位[7-9]。
1.2 微处理器设计
ARM7TDMI-S 为通用的32 位微处理器,常见的复杂指令集译码计算较为复杂,所以,ARM 结构基于精简指令集原理设计而成,减少了系统工作量,发挥了ARM7TDMI-S 高性能的优点,提高了处理器实现高吞吐量,为实现实时中断反应提供支持。处理器有两个指令集,分别为标准32 位ARM 指令集和16 位THUMB 指令集,使用THUMB 的特殊结构,使系统具备流水线性工作功能,可以连续不间断地工作,实时处理多条指令。
1.3 存储器设计
存储器内部芯片为LPC292 芯片,LPC292 芯片可用作代码和数据的储存单元,因其搭载256k 的FLASH 高速存储器,适用于临时数据的高速写入,支持8/32 位访问,具有64k 字节静态储存,包含回写缓冲模块,可以作为临时代码和数据的储存器。缓冲模块会保存最后一次接收到的字节数据,并在软件下一次请求时,将该数据写入SRAM,该回写缓冲模块能够防止大量的数据写入造成CPU 停止响应,但是在芯片复位情况下,SRAM 内数据将会初始化,不再保存最后一次接收到的字节数据,也不会反映出来。通过内置串行接口可实现高速储存器内程序的编程和擦除,方便数据储存和固件升级[10-12]。
1.4 收发器设计
选用TJA1050 高速收发器,该收发器作为协议控制和数据总线的接口,工作波特率为60~1 000 kbps,主要功能为数据总线提供收发功能。TJA1050 收发器电磁辐射低,且具抗电磁干扰的差动接收器,实现引脚保护[13-14]。该文设计的连接结构共有5 个连接点,将控制器和收发器相结合,在处理数据时,CAN总线发出声波,更好地获取监控信号。
1.5 通信接口设计
利用CAN 接口实现RS-232 总线设计与优化。文中设计的通信接口系统外部时钟和复位电路相互配合,嵌入式微控制器与CAN 总线控制器相互配合,CAN 总线收发器与RS-232 电平转换位于两端,配合RS-232 工作。
RS-232 是计算机与终端或外部设备之间的连接,符合串行物理接口标准。为保证其正常工作,电平应控制在±(5~15)V 之间,所以在连接计算机和控制器时,必须考虑RS-232 与电路连接时,由于串口不同造成的电平差异,同时也要考虑逻辑转换。该文采用内部嵌入电压倍增电路的转换芯片MAX232实现电平转换。
1.6 CAN控制器总线电路设计
控制器处于总线式串行通信网络的局域网,该网络通信系统能够确保信息的无差错传输,并能够对通信数据压缩成帧,以便于信息的可靠灵活传输[15-16]。
数据以帧的格式传输,依据格式差异,分为标准帧和扩展帧,标准帧只有11 位标识符,扩展帧有2 位标识符。CAN 总线空闲时,每个节点都可以收发数据信息。共有8个电阻,控制器总线电路中,LPF负责维护整个电路的运行,防止出现短路现象,使得城市级信号系统健康中心与线路级MSS 服务器使用统一的接口方式和通信协议,使新的MSS 服务器接入更规范。
2 系统功能设计
各线MSS服务器接入健康平台有以下两种方案,分别如图3 和图4 所示。

图3 接入方案1

图4 接入方案2
方案1:此种方案中的各线MSS 服务器直接接入健康平台。
方案2:此种方案中,总承方搭建一个MSS 集中服务器,各线MSS 服务器把数据集中传输到此集中服务器,然后各总承方集中服务器再接入健康平台。理论上,健康平台支持以上两种接入方案,在各总承方还没有建立自己的集中服务器之前,可以用方案1 的接入方式接入健康平台。等各总承方建立了各自的MSS 集中服务器后也可以支持集中服务器接入健康平台的方案。两种接入方案实施的前提是必须遵循标准的数据通信协议。因此,需要规范地铁信号集中监测系统功能。
数据包统一以帧为单位,但是每一帧的格式和长度有所不同,所以,在重要节点设置冗余配置以减小数据包大小,提高系统实时性和可靠性。采集设备种类繁多,所以采集方式也各有不同,采集的数据有差异性,且数据包的传输格式也不尽相同。但是,由于数据包较小,相同的硬件和底层软件足以完成系统功能要求。
第一步:通信设置。LPC2292包含2个CAN 控制器,利用RAM 实现通信设置,为集中监测打下基础。
第二步:CAN 接收函数判断。由于数据接收具有不定时性,无法判断发送节点发送数据的时间。在对数据查询时存在不确定性,循环查询会浪费时间,加大处理器工作量,作为实时变化因素在运行期间完成数据的实时接收与缓冲,避免重复建立多个缓冲区,改善了造成内存不足的问题,实现了数据的实时接收,提高系统实时性。
第三步:通过CAN 接收函数分析,利用发送程序确定接收程序,在发送的数据中提取有效数据,输入到寄存器中,在采集机内部确定数据,通过协议得到规定格式的数据包,集中整合了各线路MSS 服务器数据,实现了数据的集中存储,为大数据的分析统计奠定了基础。
第四步:通过分包发送实现数据传输,数据帧包括帧头(通常用SOH 表示)、数据大小、数据字节和校验码。通常帧头信息会包含标识、信息源地址和目的站地址,所传输的数据长度是发送的该数据包中数据的字节数,确定校验码,通过冗余计算获得数据。
第五步:在完成冗余设计后,得到共用体,数据量共有16位,设置第一位为最低位,最后一位为最高位。
2.1 图形化显示功能设计
利用AutoCAD 图元实体扩展数据,使用CadTool 软件对CAD 图纸内的图元添加扩展数据,系统调用CAD 原理图时,通过ActiveX 控件读取CAD 每一个图元扩展数据,形成数据集,接口程序从中心服务器提取相关数据,并按时间序生成新的数据集,当用户播放CAD 图画时,ActiveX 控件将新数据集内容按时间序写入相应的图元,实现CAD 图元与外部数据的交互动作。
2.2 报警管理功能设计
实时报警以弹窗的方式给出提示,同时可以选择开启/关闭语音报警,城市级信号系统健康中心使用图形化显示方式,能够直观地反映现场设备运行状态,并且图形化的设备状态与报警相结合,使报警分析更方便。
3 案例验证
以成都地铁为例,交控MSS 服务器与信号系统健康中心网络贯通后,进行现场测试。测试内容:交控MSS 服务器接入网达队列服务器进行联调。实验步骤如图5 所示。
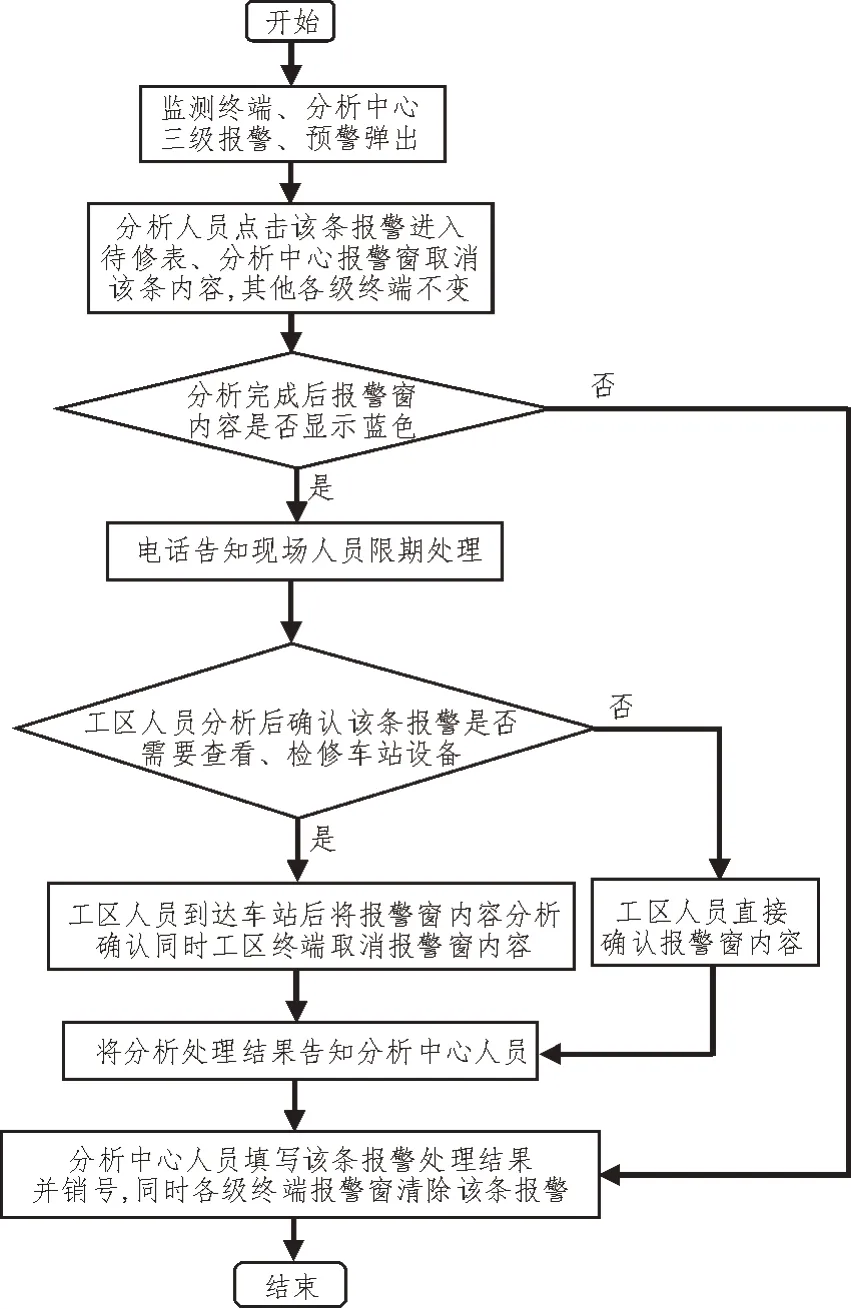
图5 地铁信号集中监测流程
假设系统时钟的技术频率为f,系统响应时间为T,则Tcan=(a2-a1)/f,以此可以计算出系统的响应时间。依次记录波特率从1 Mbps 降低至100 kbps 时定时器的时间读数,并根据公式计算出相应的响应时间,调试实验结果对比如表1 所示。
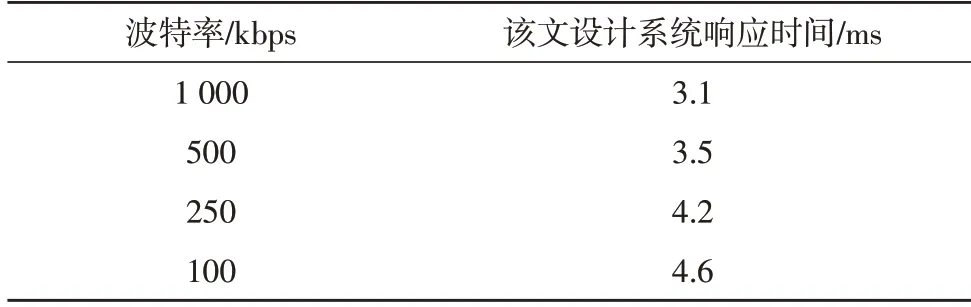
表1 调试时间实验结果
CAN通信的实时性指的是发送节点写入数据发送至缓存器与接收到数据之间的时间差,所以CAN 数据的响应时间越短,则表示系统的实时性越高。以上述实验参数为基础,对系统检测性能进行实验验证。
在图5 的基础上,将波特率从1 Mbps 逐渐降低,依次测量两个任意节点之间最长传输距离,实验结果对比如表2 所示。

表2 最远传输距离实验结果
由表2 的实验结果可以看出,在100 kbps 的限制下,该文方法最远传输距离可达430 m。
4 结束语
该文针对现有地铁信号集中监测方法存在的响应时间慢、实时性差和检测性能的问题,设计了基于互联互通的地铁信号集中监测系统,在互联互通环境下,引入了CAN 控制系统,对CAN 通信设置初始化,获取CAN 接收函数和发送函数,通信协议编程,完成地铁信号集中监测,使其在响应时间、实时性和监测性能方面具有优越性。
