组合动力验证机助推段纵向控制器设计
2022-02-25华中凯黄筱莺叶子青
华中凯,黄筱莺,叶子青
(南京航空航天大学 自动化学院,江苏 南京 211100)
0 引言
火箭助推是将组合动力验证机运送到高空的一种方式。本文研究某组合动力验证机利用火箭助推器内燃料产生的巨大推力将验证机送入满足飞行任务的马赫数-高度窗口过程的姿态控制。火箭助推的方式不仅给飞行器带来巨大的动力,还能提供动力矢量燃气舵,并提供巨大的控制力矩。
然而,助推段对象飞行器的纵向控制有其特有的难点。一是飞行速度和高度跨越范围大,气动特性差别大,飞行速度在短时间里从亚音速到高超音速,飞行高度从地面到平流层和中间层的边界;二是助推发动机燃料消耗,飞行器在助推过程中有较大的质心变化,且质心变化影响飞行器的稳定性和操纵性。因此结合飞行器运动特点和自身结构,对飞行器的特性有充分的认识和分析,并设计出性能良好的控制器以保持其稳定是飞行器助推段安全飞行的基础。
目前,对于组合动力技术大多处于发动机验证阶段,对于验证机助推段纵向控制问题的阐述较少。因此本文将分析助推段的运动特性,并研究讨论两种纵向姿态控制方案的可行性,最后结合飞行器的任务给出助推段合理的纵向控制方案。
1 建模与对象特性分析
1.1 对象特性建模
1)模型描述
组合动力验证机助推段构型复杂,操纵机构同时依赖燃气舵面偏转和气动舵面偏转,质量、惯量和质心等质量属性随着助推火箭发动机燃料的消耗而时刻发生线性变化;助推段对象飞行器的飞行包线大,马赫数、高度变化剧烈,飞行器气动特性变化大。因此建立整个助推段飞行过程的六自由度仿真模型,需要对大气环境、地球模型以及飞行器自身的气动、执行机构、推力、质心、质量以及惯量进行建模分析。
本文基于作者所在实验室开发并使用多年的“高超飞行器动力学数学模型库”的架构,再结合对象飞行器的特殊结构气动属性,给出了助推段非线性数学模型的整体框架图,如图1所示。其中u表示舵面的输入量,包括气动舵和燃气舵,y表示输出量,主要有迎角、侧滑角和马赫数等。
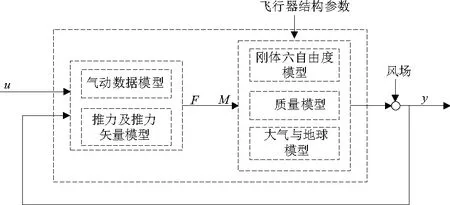
图1 飞行器助推段非线性数学模型架构
2)刚体六自由度模型
飞行器的运动规律可以用微分方程进行描述,参考文献[2]中提供了详细的坐标系定义、运动学方程和动力学方程,以此建立自转圆球模型下的六自由度非线性微分方程:
(1)

1.2 静稳定性及模态分析
纵向静稳定性表示飞行器在平衡状态受扰动后恢复平衡的能力,通常用静稳定导数来表示。静稳定性导数可以表示为
(2)

利用气动数据计算出助推段飞行包线内的纵向静稳定导数如图2所示,可见在整个飞行助推即马赫数从0.4~6.5的过程中,静稳定导数>0,纵向静不稳定,且马赫数越小,纵向静稳定导数越大,即静不稳定的程度越大。常规俯仰角控制律只适用纵向静稳定过程,因此无法满足此阶段的控制需要。
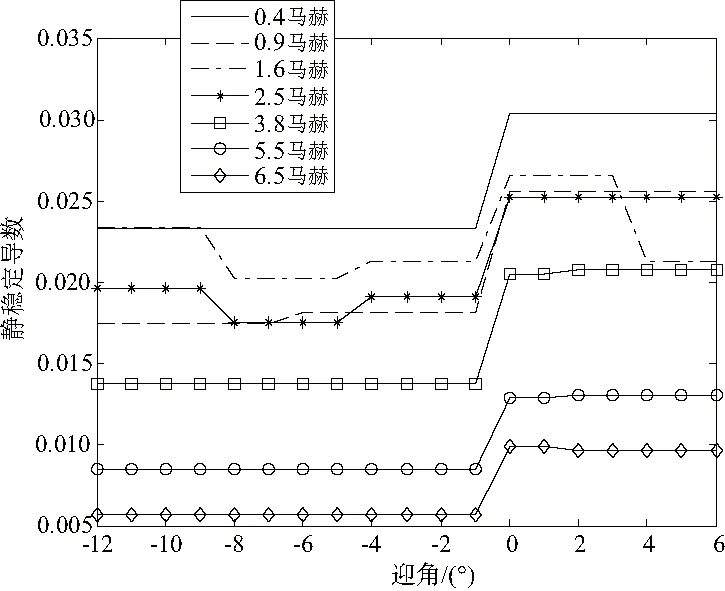
图2 纵向静稳定导数特性曲线
建立运动参数时变模型,沿着助推段标称轨迹选取典型工作点配平和小扰动线性化,得到整个助推飞行的纵向模态如表1所示。可见,由于纵向静稳定导数>0,助推段整个飞行过程中都存在由短周期模态特征根退化而来的正实根,纵向呈现快速发散的动态特性。
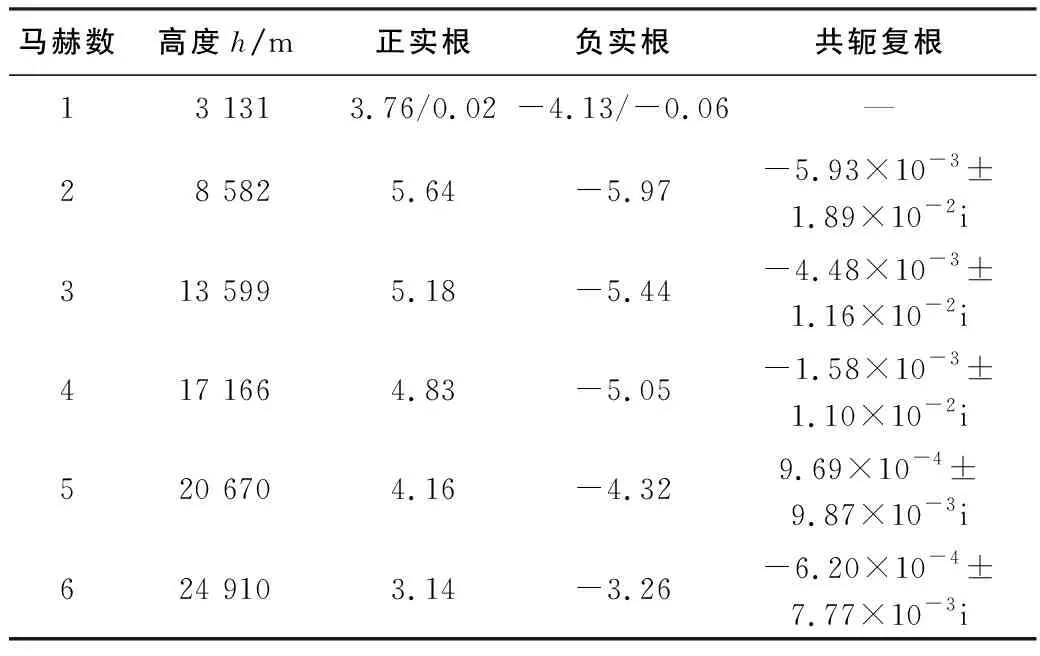
表1 助推段纵向特征根
2 基于角速率指令内回路的纵向控制律
2.1 典型工作点选取
由于助推段飞行器对象特性变化剧烈,因此控制律参数设计采用增益调参技术。模态特性表明:飞行器的纵向动态特性主要和动压、迎角相关;从轨迹参数来看,主要受马赫数和迎角的影响。因此选取以马赫数、迎角为参数的工作点。确定典型工作点后进行控制律的设计和验证,最终形成一个以马赫数、迎角为变量的控制参数二维线性插值表(表2)。
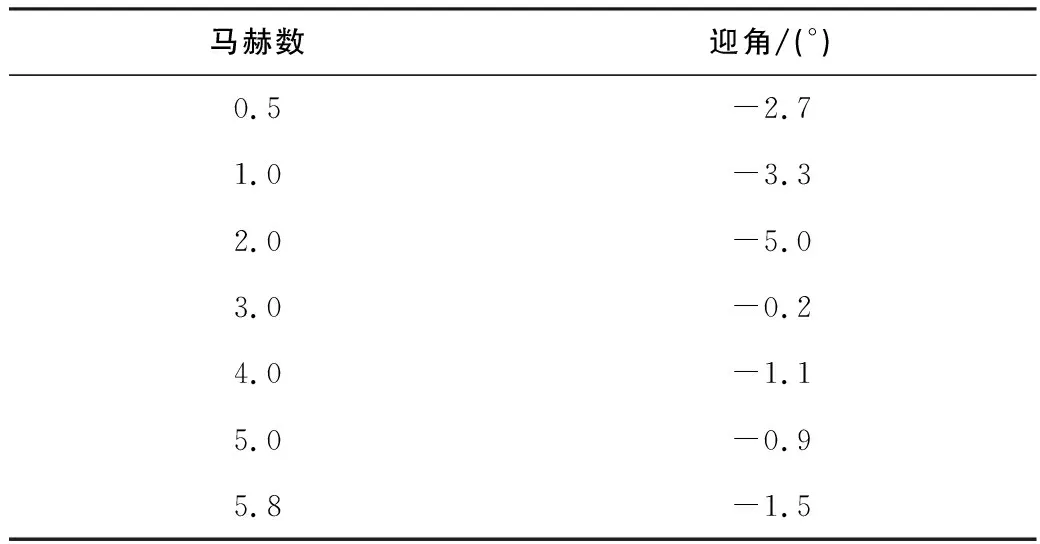
表2 标称轨迹典型工作点
2.2 增稳控制结构
角速率指令内回路作为常用的纵向控制增稳系统(CAS),具有较强的增稳能力和精确跟踪目标。
图3是俯仰增稳控制系统的结构框图,控制变量是俯仰角速率。在图中,虚线表示两种不同的设计模式,一种是俯仰角速率直接反馈给执行机构,另一种是比例积分(PI)补偿器的“比例环节”将俯仰角速率信号反馈给执行机构。就反馈信号而言,这两种模式是等价的。当用根轨迹去设计系统的闭环极点时,若采用俯仰角速率直接反馈给执行结构模式,设计时需要考虑两个闭合回路才能确定Kq和KI。而PI补偿器在设计时基于q/δe传函,PI补偿器的零点(在s=-KI/Kp处)被设计好后只需调整KI,设计过程中只含一个闭合回路。由此看来,对于整个闭环传递函数,这两种模式是不等价的。若使用PI补偿器,补偿器的零点会耦合到闭环传递函数中,而在根轨迹设计中只能顾及到闭环极点,所以这个零点往往会使闭环系统的阶跃响应有一个大的超调。图4给出了两种控制增稳结构下的俯仰角速率阶跃响应,可见,相比于直接反馈俯仰角速率到升降舵,PI补偿器的零点带来了更大的超调,对于俯仰角外回路的指令跟踪效果也会更差。因此,选择直接反馈俯仰角速率到升降舵的控制结构。
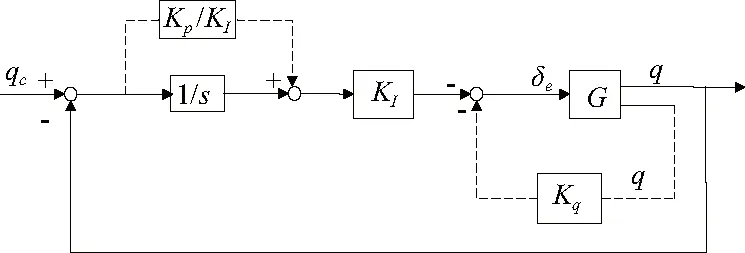
图3 俯仰增稳控制系统(CAS)
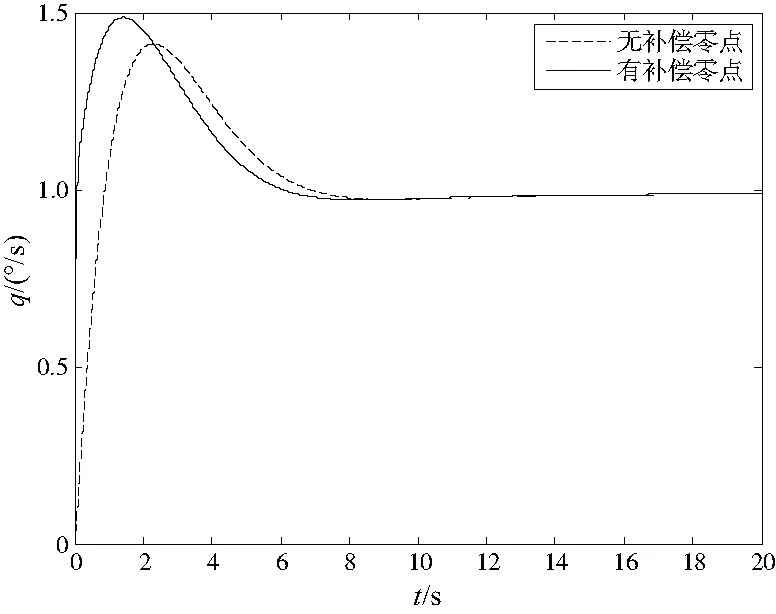
图4 CAS下俯仰角速率阶跃响应
2.3 参数设计及性能分析
1)角速率回路
角速率回路控制结构如式(3)所示。
(3)
式中:俯仰角速率直接反馈到升降舵,以增大短周期阻尼比;积分项KI作为主控项,起短周期增稳的作用;qc是俯仰角速率指令,由俯仰角外回路给出。
控制律参数设计可借鉴PI补偿结构来分析。图5给出了添加一对零极点后的俯仰角速率反馈根轨迹图,可见先在原点处添加一个积分器对消原点处的零点,再在左半平面添加一个零点便可将根轨迹向左弯曲,随着增益变大,不稳定极点向左运动直至稳定。通常情况下,希望补偿零点值与期望的短周期自然频率相近,将根轨迹向左拉直至包围补偿零点,但是这种情况下相位裕度较小,超调较大,若要获得较好性能的阶跃指令响应,必须设计更大的积分增益。因此将补偿零点放在靠近虚轴的位置,在积分增益一定时,补偿零点越靠近虚轴意味着比例增益更大,将增加系统的阻尼比,减小超调,增加相位裕度。

图5 加入补偿器后的根轨迹及相位图
2)俯仰角回路
俯仰角回路作为角速率回路的外回路,产生期望的俯仰角速率指令,从而实现俯仰角的跟踪与控制,其控制律为
qc=Kθ(θ-θc)
(4)
在角速率指令内回路的基础上设计外回路俯仰角控制律参数,图6给出了俯仰角到升降舵的根轨迹图及相位图。可见,俯仰角增益Kθ越大,系统阻尼比越大,自然频率越大,阶跃响应超调变大,反应速度变快,相位裕度变大,但是变化幅度均较小。因此设计Kθ的值为-1。表3给出了标称轨迹典型工作点的参数设计值。
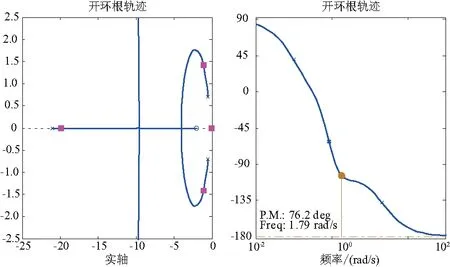
图6 俯仰角到升降舵根轨迹及相位图
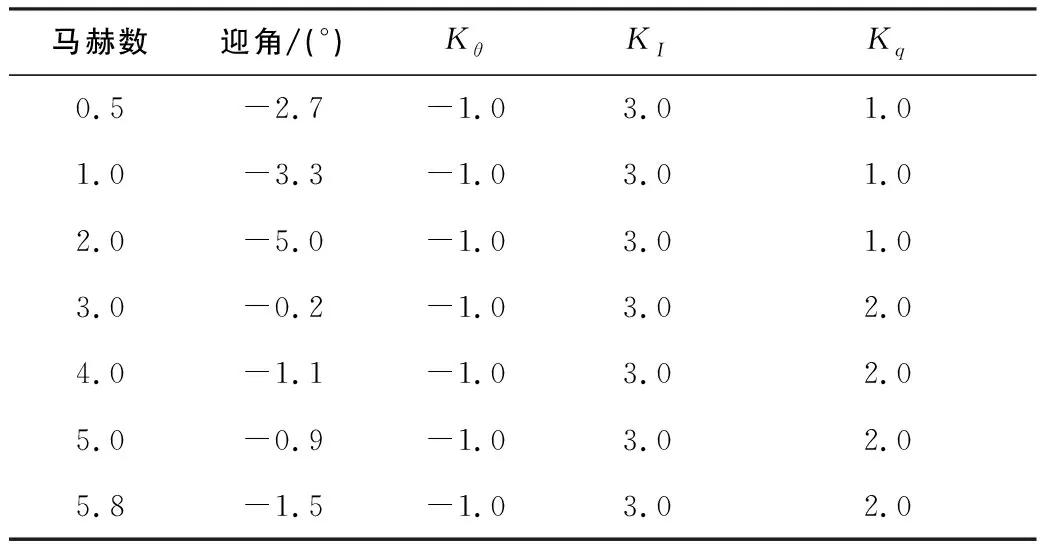
表3 标称轨迹典型工作点的参数设计
3)控制性能分析
从控制律参数和阶跃响应及相位裕度分析俯仰角速率指令内回路的性能。图7给出了俯仰角阶跃响应曲线,相比于图3,图7中6条标称轨迹典型工作点的阶跃响应差异小,且超调量都较小。图8为俯仰角频域下的相位曲线,相位裕度在45°~62°。说明在工程允许的参数范围内,俯仰角速率指令内回路能适应稳定度差异较大的各个工作点,当动压大、纵向不稳定度大时,控制能力仍较强。
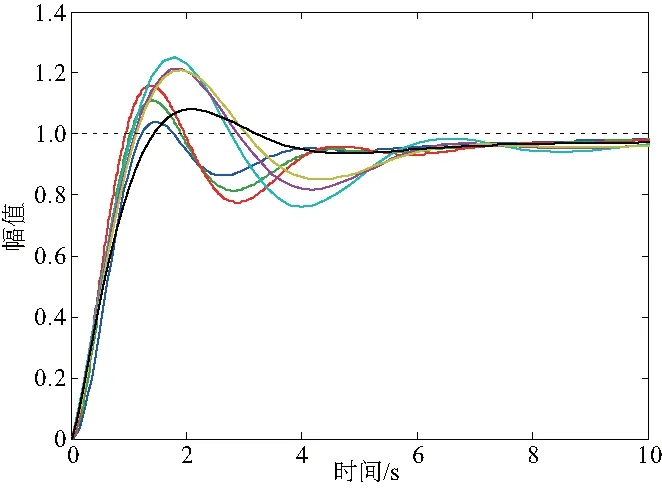
图7 标称轨迹工作点俯仰角阶跃响应曲线
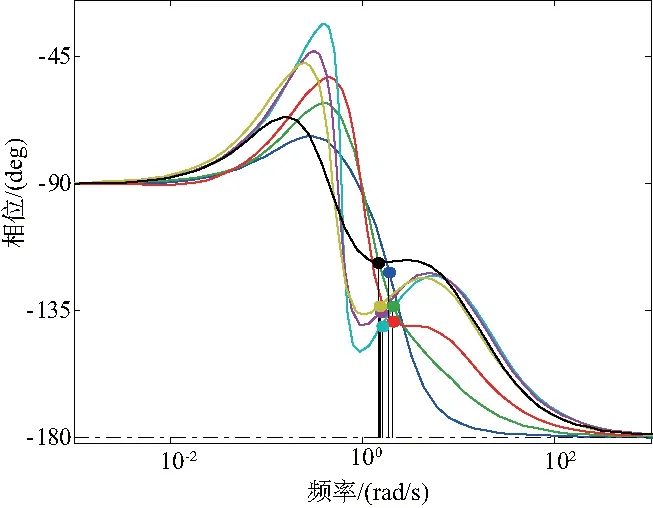
图8 标称轨迹工作点俯仰角相位曲线
3 鲁棒性验证仿真
鲁棒性是指在参数不确定性下控制系统仍然能够保持稳定的能力。不确定性可以是来自外部环境的干扰,也可以是自身气动结构的不确定。因此建立基于图1仿真模型的等效仿真平台,注入表4所示的不确定性参数上下极限组合偏差,验证控制系统的鲁棒性。
表4 综合仿真不确定性参数
图9和图10给出了注入28=256种组合偏差不确定性后仿真结果中的高度-马赫数和俯仰角曲线。对仿真曲线进行总结分析,可以得出以下结论:
图9 组合偏差仿真高度-马赫数曲线
图10 组合偏差仿真俯仰角曲线
1)对象飞行器助推段采用基于俯仰角速率指令回路的纵向控制方案能有效增强系统稳定性,在所有组合偏差情况下都能控制俯仰角跟踪指令。
2)俯仰角控制方案可靠有效,能够实现进入马赫数-高度窗口的任务,且马赫数-高度仿真曲线相对集中,与标称轨迹的偏差较小。
综上,俯仰角速率指令内回路在助推段具有很好的鲁棒性,可以顺利完成助推段飞行任务。
4 结语
组合动力验证机在助推过程中静稳定性差,纵向采用俯仰角速率指令内回路控制能够很好地保证纵向角运动的安全性,并具有较强的鲁棒性,在所有组合偏差仿真情况下都能顺利通过马赫数-高度窗口,完成飞行任务。