基于凸轮机构的8字S轨迹无碳小车*
2022-02-23刘宇欣程超伟王敬浩
□ 刘宇欣 □ 谢 滨 □ 程超伟 □ 王敬浩
安徽工业大学 机械工程学院 安徽马鞍山 243000
1 设计背景
无碳小车是一种由重力势能驱动,具有方向控制的自行驶小车。全国大学生工程训练综合能力竞赛已成功举办多届,无碳小车是项目之一。每一届无碳小车的轨迹会产生变化,对无碳小车的技术要求也在不断提高。
根据第七届全国大学生工程训练综合能力竞赛无碳小车的要求,无碳小车运动的场地规格为5 200 mm×2 200 mm长方形光滑平面,中间放有挡板,设有12个障碍桩,障碍桩为直径20 mm、高200 mm的圆棒。障碍桩间距指两个障碍桩中心线之间的距离,根据比赛要求确定。在决赛中,无碳小车需要在三个难度不同的绕桩轨迹中选择,三个轨迹分别为环形S、8字S、综合。结合上述要求,笔者选择难度较高的8字S轨迹,对8字S轨迹无碳小车的各个主要机构进行结构设计,应用MATLAB软件对无碳小车运动轨迹进行仿真与分析,并设计出8字S轨迹凸轮的理论廓线,最终完成实物样车,使无碳小车可以顺利驶出8字S轨迹。场地与无碳小车运动轨迹如图1所示。

▲图1 场地与无碳小车运动轨迹
2 整体设计方案
2.1 整体结构
无碳小车的设计要点为在轨迹正确和有限的能量驱动下,无碳小车可以行驶更多的路程。结合模块化设计理念,将无碳小车分为原动机构、传动机构、行走机构、转向机构、微调机构五个模块进行设计[1]。无碳小车整体结构如图2所示。
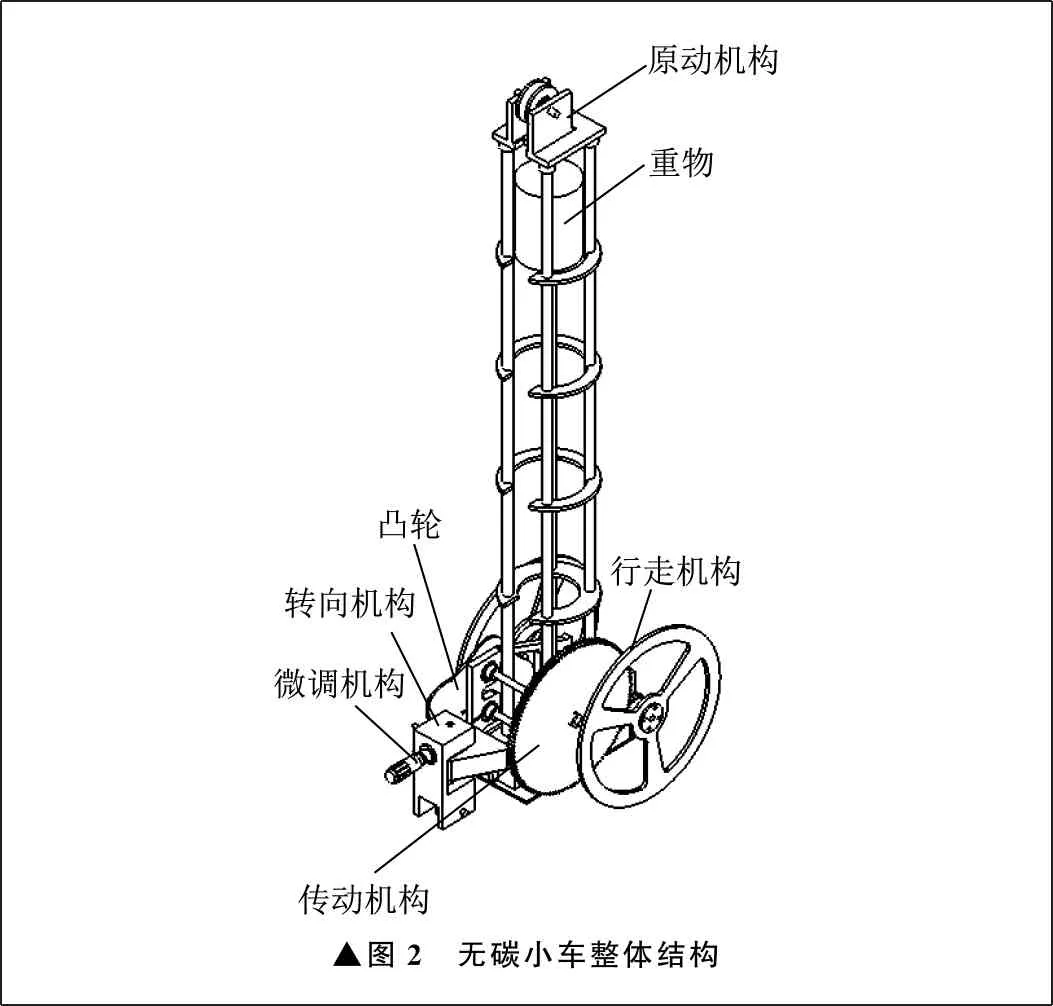
▲图2 无碳小车整体结构
2.2 原动机构
无碳小车行驶过程中,唯一的动能来自于1 kg质量重物从300 mm高度下落所提供的3 J能量。为了使无碳小车结构简单、方便安装,并容易加工制造,无碳小车的原动机构采用绳轮式结构。采用绳子将重物吊起,通过定滑轮与卷筒实现能量转换。
2.3 传动机构
传动机构采用齿轮传动。为了避免多余的能量损耗,无碳小车使用的两对齿轮传动均为一级传动[2],凸轮与后轮之间为两级传动。齿轮材质选择铝合金,用以减轻质量。设计为薄齿轮与法兰盘组合形式,以减小齿轮加工难度。通过卷筒和法兰盘上的紧定螺钉,将卷筒和法兰盘紧固在绕线轴上,以此传递力与能量。传动过程如下:原动机构通过卷筒将能量和力转换至绕线轴,再通过绕线轴上的传动齿轮将能量与力分别传递至凸轮轴与主动轴。传动机构的三维模型如图3所示。
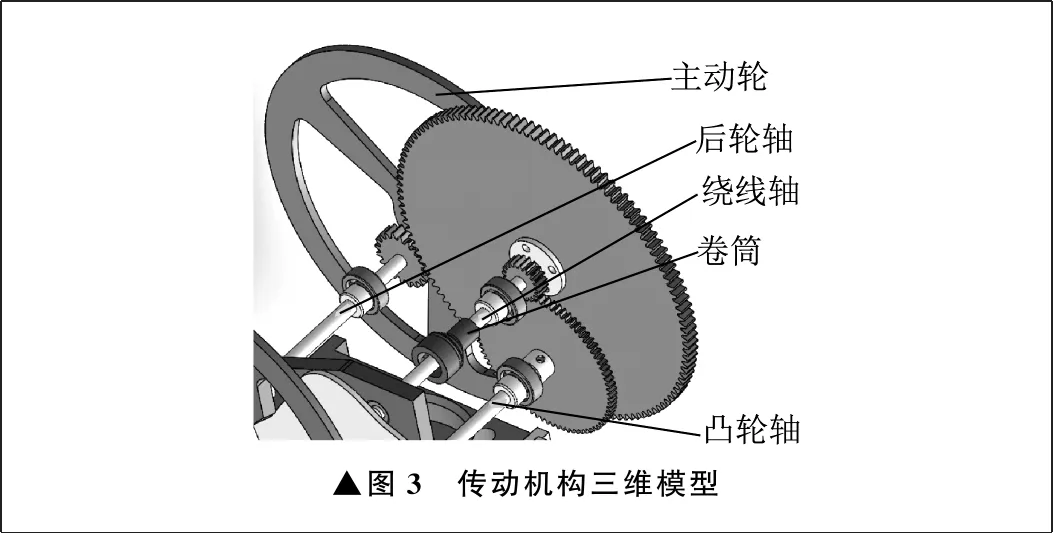
▲图3 传动机构三维模型
2.4 行走机构
常见的行走机构有双轮同步驱动、双轮差速驱动、双轮交替驱动、单轮驱动等形式。为了克服无碳小车在转弯过程中两个后轮速度不等的情况,在差速驱动和单轮驱动形式中进行选择。差速驱动形式应用起来比较复杂,并且需要单独设计[3]。为了简化设计流程,节约无碳小车空间,无碳小车行走机构总体采用三轮结构,并且采用单轮驱动形式。前轮为转向轮,后轮分别为主动轮和从动轮。从动轮与轴承相配合,实现转弯时的差速。
2.5 转向机构
转向机构的选择是无碳小车能否精确完成任务轨迹的关键,在往届比赛中,常见的转向机构有凸轮机构、曲柄滑块机构、曲柄摇杆机构、空间四杆机构等[4]。曲柄摇杆机构占用空间较大,空间四杆机构设计较为复杂。为了方便设计与理论分析,同时减小无碳小车的尺寸,笔者采用凸轮摆杆机构来实现无碳小车转向的控制。与其它转向方案不同,凸轮摆杆机构可以通过减小廓线曲率,避免急回特性,使转向更加平稳,并利用凸轮不同的推程来控制无碳小车前轮转向角度,进而控制无碳小车转向。凸轮摆杆机构工作原理如图4所示。

▲图4 凸轮摆杆机构工作原理
凸轮摆杆机构最大的优点是结构简单,便于设计安装,可以解决多种复杂轨迹问题,并且机构响应快速、精确。凸轮摆杆机构的缺点在于要求有极高的加工与安装精度,若有0.01 mm的误差,就会导致整个轨迹出现大幅改变。为此,笔者选用激光切割技术加工高精度轮廓,并采用轴套定位凸轮安装位置。为了实现多种任务轨迹,使无碳小车在8字S轨迹及其它轨迹转向时更加平稳,设计中选择较大的凸轮基圆半径。在无碳小车转向机构凸轮部位设有较大的空间,可以方便快速更换凸轮。转向机构的三维模型如图5所示。
2.6 微调机构
在无碳小车运行过程中,由于受到加工精度、安装精度及环境因素影响,无碳小车运行轨迹与理论轨迹存在一定偏差。为了使无碳小车运行轨迹封闭,需要通过设计微调机构来进行误差修正。微调机构由千分筒、精密滑块、固定螺钉组成,结构如图6所示。千分筒选用一般标准件,精度为0.004 mm,推程为7.5 mm。精密滑块采用光敏树脂材料,通过三维打印技术获得,可以节约无碳小车制作成本。通过旋转千分筒推动精密滑块在滑槽中水平位移,由精密滑块带动摆杆,并且采用固定螺钉压紧滑块,实现对前轮初始转角的调整,防止无碳小车运行轨迹发生旋转。

▲图5 转向机构三维模型
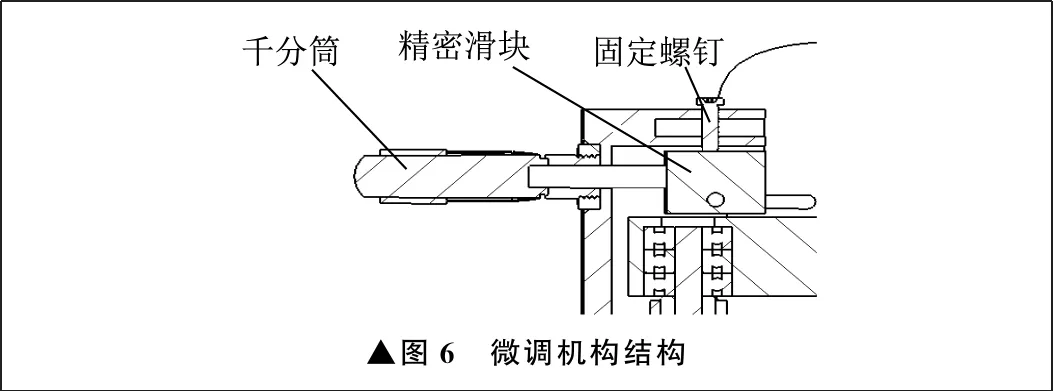
▲图6 微调机构结构
3 设计参数
无碳小车运行一周的距离S为10.744 m,凸轮与后轮之间为两级传动,凸轮旋转一圈,无碳小车运行一周。取两级传动比分别为4、6,得总传动比i为24,则后轮直径D为:
D=S/(iπ)=142.5 mm
设凸轮轴直径、绕线轴直径、后轮轴直径均为5 mm,取无碳小车最佳运行轨迹速度v0为0.3 m/s,计算各转速。
后轮转速n3为:
n3=60v0/(πD)=40.208 r/min
绕线轴转速n2为:
n2=n3/6=6.701 r/min
凸轮轴转速n1为:
n1=n3/i=1.675 r/min
绕线轴受到的扭矩T为:
T=mgd2/2
(1)
式中:m为重物质量;g为重力加速度;d2绕线轴直径。
则绕线轴输出功率P为:
(2)
无碳小车各部位设计参数见表1。

表1 无碳小车各部位设计参数
4 运动轨迹分析
凸轮是无碳小车转向机构的关键部件,为了保证轨迹的正确性,要求凸轮需要有极高的精度。凸轮结构设计与轨迹仿真需要通过MATLAB软件编写相关程序,进行分析。程序设计流程如图7所示。
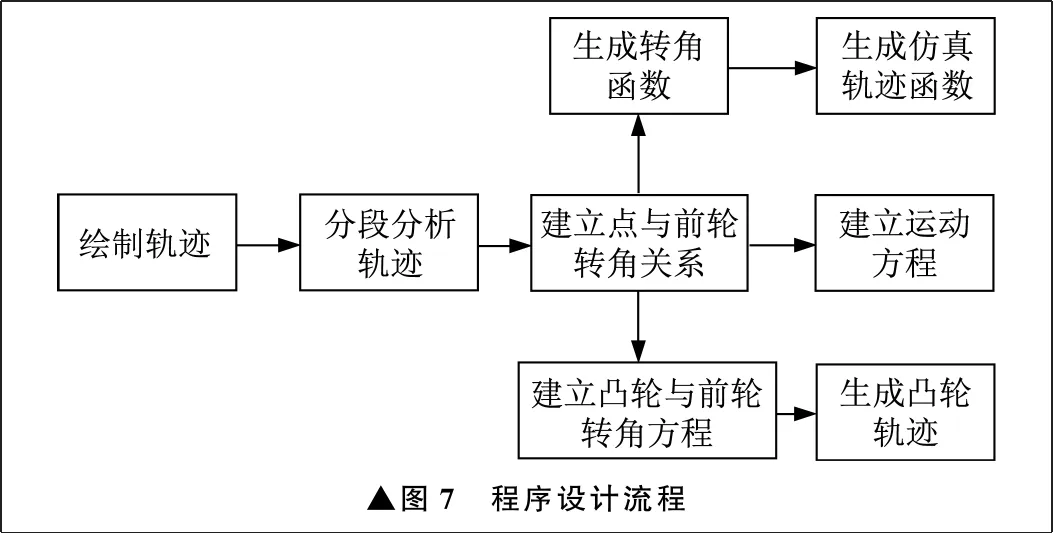
▲图7 程序设计流程
无碳小车运行轨迹确定时,在SolidWorks软件中以12个障碍桩为圆心画出12个轨迹圆,采用样条曲线绘制无碳小车运行轨迹曲线。无碳小车运行轨迹曲线与轨迹圆相切,连接各个轨迹圆的切点,得到初步的无碳小车运行轨迹。采用微分法将曲线分为10 000个点,组成各个小段,输出轨迹坐标为文本文件,导入MATLAB软件,得到无碳小车运行轨迹,如图8所示。

▲图8 无碳小车运行轨迹
凸轮结构需要依据无碳小车运行轨迹各个阶段的转向进行分析,要求无碳小车转向平稳,并且防止侧翻。设无碳小车前轮转角与运行轨迹变化弧度相等,将路径N等分,对无碳小车各阶段运行轨迹进行分析,并建立方程[5],得到转角在35°内的无碳小车运行轨迹,设计出合适的凸轮推程与转角关系。无碳小车轨运行轨迹几何关系如图9所示。图9中,a为主动轮与前轮中心距离,b为从动轮与前轮中心距离,θ为前轮转角,ρ为后轮中心运动轨迹转动半径。

▲图9 无碳小车运行轨迹几何关系
设在单位时间t内,后轮中心运动轨迹转角增量为Δα,后轮中心运动轨迹增量为Δs,从动轮运动轨迹增量为Δs1,主动轮运动轨迹增量为Δs2。当主动轮运动轨迹转角增量为Δα时,后轮轴旋转角度增量为Δβ,主动轮旋转弧长为RΔβ。由几何关系可得[6]:
ρ=L/tanθ
(3)
(4)

(5)
Δs2=(ρ-a)Δα=RΔβ
(6)
对无碳小车运行轨迹采用微分法在MATLAB软件中进行分析[7]。
根据几何分析,由公式θ= arctan(L/ρ)得到每一段前轮转角,记录并用于凸轮设计。设第i段主动轮旋转弧度为βi,第i-1段主动轮旋转弧度为βi-1,第i段前轮中心方向角为γi,第i-1段前轮中心方向角为γi-1。结合微分法,根据无碳小车运行轨迹,可得:
γi=γi-1+Δα
(7)
(8)
βi=βi-1+Δβ
(9)
设无碳小车运行轨迹第i段坐标为(xi,yi),第i-1段坐标为(xi-1,yi-1),初始位置坐标为(x0,y0),根据运动规律可得:
(10)
(11)
根据无碳小车各轮之间的运动关系,得到相关坐标,由此进一步可以得到各轮的运行仿真轨迹,如图10所示。

▲图10 无碳小车各轮运行仿真轨迹
5 凸轮设计
验证完无碳小车运行轨迹的可行性后,需要找出前轮转角θ与凸轮推程H之间的关系[8],根据凸轮偏距及前轮转角关系,由MATLAB软件得到凸轮轮廓。根据摆杆凸轮原理[9],可以得到前轮转角θ与凸轮推程H之间的关系。
当θ>0时,无碳小车左转,有:
H=Etanθ
(12)
当θ<0时,无碳小车右转,同样有:
H=Etanθ
各个N等分线段均有上述关系,通过MATLAB软件程序分析,可以得到凸轮一圈推程。最后生成图纸,并导入SolidWorks软件,建立凸轮模型,如图11所示。应用SolidWorks软件对无碳小车进行运动仿真,进一步验证凸轮轮廓的正确性[10]。验证无误后,采用激光切割或线切割对凸轮进行加工制作。
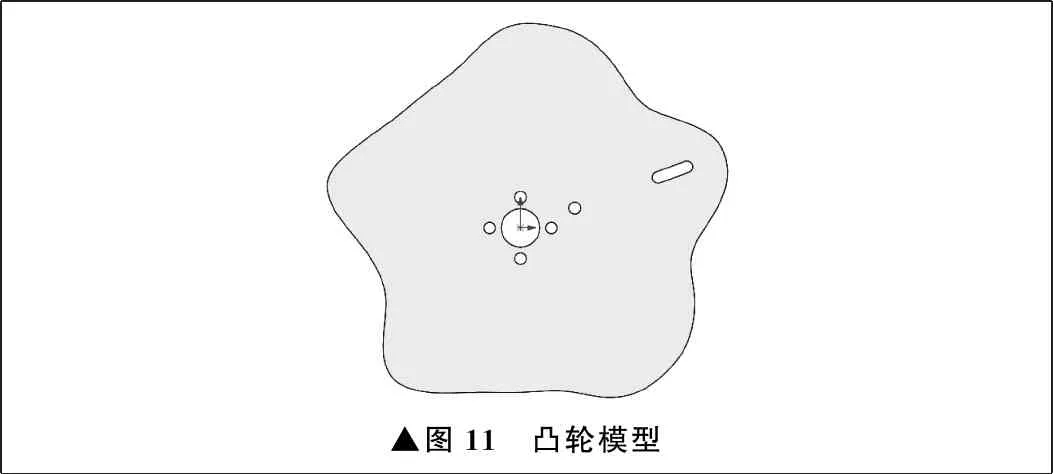
▲图11 凸轮模型
6 样车制作
为了验证理论设计的正确性,应用现有加工技术制作出无碳小车样车。无碳小车样车如图12所示。按照竞赛要求运动轨迹,运行无碳小车,调整微调机构进行轨迹修正,调整后无碳小车运行轨迹与理论运行轨迹基本保持一致。在竞赛中,无碳小车各机构反应灵敏,能够很好地按照预定轨迹行驶。由于采用了较小的卷筒,增加了绕线轴的圈数,使整个运动行程得到有效提升。最终所设计的无碳小车在竞赛中取得优异成绩。

▲图12 无碳小车样车
7 结束语
笔者对8字S轨迹无碳小车各个机构的结构进行设计,并应用MATLAB软件辅助分析无碳小车运行轨迹,得到凸轮廓线及优化数据。基于优化数据,成功制作了无碳小车样车参加竞赛,实现了预定功能,并取得了优异成绩。
笔者设计的无碳小车结构简单,加工方便,安装快捷,成本较低,各机构间布置合理,大幅提高了空间利用率。采用凸轮摆杆机构,不仅简化了设计流程,而且节约了大量空间,同时还可以减少传输过程中的能量损耗。
无碳小车行程远,轨迹精准。在微调机构及其它机构的配合下,无碳小车行驶平稳。
无碳小车数据合理,便于修改,并且具有普适性。面对新的任务要求,按照笔者介绍的相关方法,修改程序相关参数,就可以得到全新的优化数据。应用这些数据继续进行仿真验证,可以制作出满足要求的凸轮等机构。
