光场调控在相干拉曼散射光谱与成像中的应用(特邀)
2022-02-22李润丰董大山施可彬
李润丰,董大山,施可彬,2
(1 北京大学物理学院人工微结构和介观物理国家重点实验室,北京100871)
(2 山西大学极端光学协同创新中心,太原030006)
0 引言
光与物质相互作用一直以来是科学研究的热点问题。光作为一种非侵入、无接触的探测手段可以高效而无损地获取待测体系内部的丰富信息。这些信息或揭示样本的化学特异性,为定量的物质成分分析提供依据;或反映了样品精细的空间结构,允许人们以光为媒介提取微生物、微结构的形态学特征;或打开了观察样品的时间窗口,以超短光脉冲为信息载体揭示瞬态动力学过程。
基于自发拉曼散射的光谱和成像技术就是这一领域的重要研究方向,自1928年发现以来[1-10],逐步成为光学领域重要的研究工具。一方面,拉曼散射光子携带分子的振动信息,弥补了红外光谱在水吸收窗口处的探测能力不足,为生物、医学领域研究提供了重要的工具;另一方面,作为一种重要的无标记检测手段,拉曼光谱可以在保持样品活性的同时,实现无损和长时程的观察[11-20]。
由于自发拉曼信号需要较长的积分时间,所以当涉及到一些瞬态的动力学过程以及活体生物动态观察时,成像的速度受到极大的制约。为了更进一步提高拉曼信号的强度,利用非线性光学过程实现的相干拉曼散射(Coherent Raman Scattering,CRS)技术蓬勃发展,主要方法包括相干反斯托克斯拉曼散射(Coherent Anti-stokes Raman Scattering,CARS)和受激拉曼散射(Stimulated Raman Scattering,SRS)。相干拉曼相比于自发拉曼大大提高了信号强度,同时使信号采集的积分时间缩短。自CRS 走向应用以来,出现在各类化学、生物、医学应用中的新场景,也在不断提出新的要求与挑战:如何实现更高的信噪比,更大的穿透深度,更快的探测速度,更丰富的光谱信息,更强的分辨能力[21-30]。这也极大地促进了相干拉曼技术在最近二十年来的快速发展:通过结合各类新型光场调控方法,从相干拉曼的非线性过程中光束的偏振、啁啾、时序、相位等多个维度入手,应对上述挑战,使基于CRS 的光谱与成像技术在多个领域具有重要的实用价值,本文以光场调控为主线,梳理CRS 光谱和成像上的发展与应用。
1 基本原理
相干拉曼技术本质上是涉及四个光子的三阶非线性光学过程,该过程与待测体系的三阶非线性极化率有关。不管样品是否具有对称性,总有非零的三阶非线性极化率张量元,因此可以广泛用于物质探测。为了获得显著的三阶非线性效应有两种方法,第一是利用脉冲激光器提供极高的峰值功率,第二是调谐作用光的频率通过共振增强。上述频率调谐具体是,频率为ωP1的泵浦光(pump)和频率为ωS的斯托克斯光(Stokes)激发样品(ωP1>ωS),当满足共振条件:泵浦光和斯托克斯光的频率差与样品化学键振动频率Ω一致时,样品分子将处于拉曼相干态。在此基础上有CARS 和SRS 两类过程,能级示意图见图1。
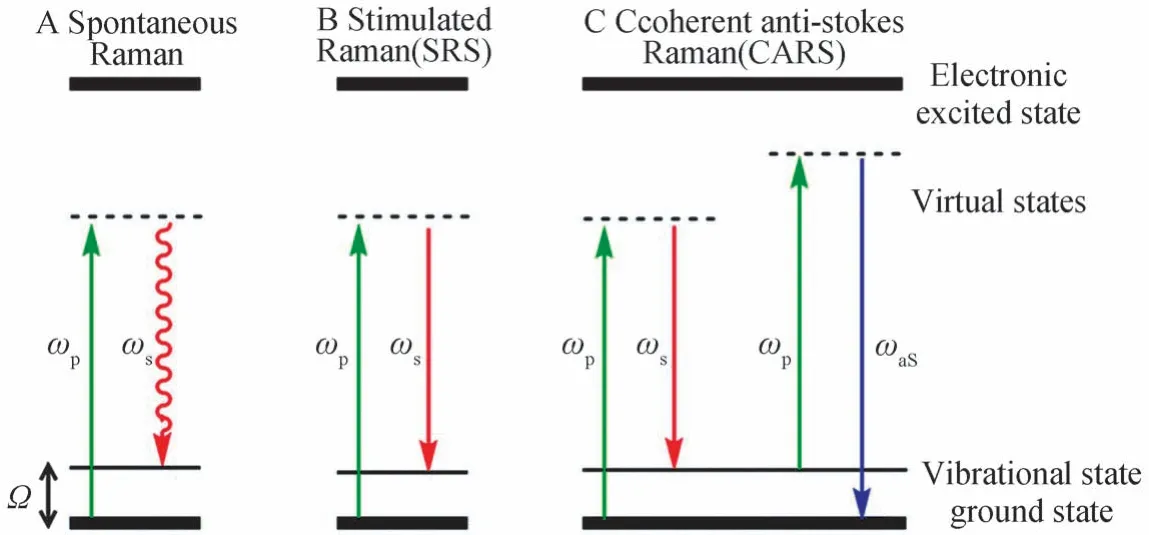
图1 CARS 和SRS 能级示意图[5]Fig.1 Energy diagrams of spontaneous Raman,SRS and CARS[5]
对于CARS,若频率为ωP2的探测光在相位匹配的方向上入射,将产生频率为ωAS=ωP1−ωS+ωP2的反斯托克斯光。其中,探测光也可由泵浦光充当,则此时ωAS=2ωP−ωS,被称为简并的CARS。CARS 技术的优势在于,信号强度比自发拉曼散射强度大4~5 个数量级,并且信号光在泵浦光的蓝端易于采集且不易受荧光干扰。CARS 技术的不足则主要在于非共振背景的影响,这一背景来源于样品分子和所处环境的电子对入射光的响应,是与共振无关的四波混频噪声[4],会使采集到的CARS 光谱相对自发拉曼光谱发生偏移,因此涌现出了多种光场调控的方法对该背景噪声进行抑制或消除。
SRS 技术的产生机制与CARS 不同,在共振激发下,光与样品分子可以发生能量交换。泵浦光子借助分子振动能级转化成为斯托克斯光子,同时将部分能量转移至振动能级上。因此泵浦光会发生受激拉曼损失(Stimulated Raman Loss,SRL),同时斯托克斯光会发生受激拉曼增益(Stimulated Raman Gain,SRG)。SRS 只有严格满足共振条件时才会发生,因而本质上不存在非共振背景,通过锁相放大技术可以把SRL 或SRG 这一微弱的信号提取采集。实际应用中锁相放大技术需要提供一个参考频率,这一频率调制通常借助于振幅[6]、偏振[7]、移频[8]等调控方式实现。
2 光场调控在相干拉曼光谱学中的应用
以CARS 和SRS 的拉曼特异性机制实现光谱探测可以追溯到20世纪60年代[9]。特别是CARS 光谱技术,因其可以推断物质组分与浓度,也可以进一步获取气体样品的温度信息,所以自从被发现以来CARS 光谱在燃烧场诊断中得到了广泛的应用[10]。相比于传统接触式的热电偶等方法,CARS 光谱可以通过非接触式的光学方法,轻易实现高温场的诊断,但在早期的实际应用中仍存在一些问题。
2.1 入射光场角度调控——BOXCARS
早期CARS 光谱的相位匹配方式是共线的,这意味着在泵浦光和斯托克斯光行进路径上的介质都会产生CARS 信号,因此空间分辨率较低。1978年,ECKBRETH A C 借助对入射角度和波前的调控实现了非共线相位匹配的交叉CARS(BOXCARS)[11]。在这种相位匹配方式下,CARS 信号只有在三束光交叉点处才会产生,并且在透镜的聚焦下,焦点可以做到比较小,以此提高空间分辨率。1980年,PRIOR Y 进一步提出三维BOXCARS 的概念[12]。同年,SHIRLEY J A 等提出折叠的BOXCARS[13]。这些工作把对光场入射角度的调控拓展到三维空间,在提高空间分辨率的同时,使信号光与入射光更容易分离。CARS相位匹配方式见图2。
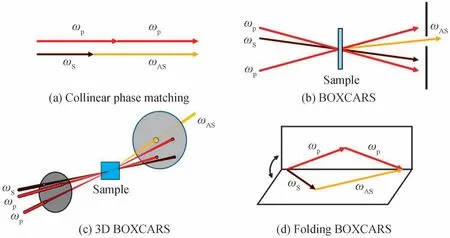
图2 通过调控入射角度实现各种CARS 相位匹配方式Fig.2 CARS phase matching methods by adjusting the incident angle of light field
2.2 脉冲光场时序调控——时间分辨CARS
影响光谱效果的第二个问题是非共振背景,这一背景容易使化学特征峰位置发生偏移,对谱学的分析会有干扰。研究人员为了解决这一问题,提出了一种通过调控探测脉冲时序做时间分辨抑制非共振背景的方法,该方法利用了CARS 信号的拉曼相干态和非共振背景的激发虚态随时间的衰减特性不同的特性。以空气的时间分辨CARS 光谱为例[14],如图3所示,空气的CARS 光谱主要由氮气的CARS 信号和另外三种物质的非共振背景构成,很明显可以看出,当精确调控探测光束延迟110 ps 时,非共振信号减少了三个以上的数量级,而共振信号仅减少了三倍。连续调控探测光脉冲的延迟可以获得不同温度下拉曼相干态的时间演化,这也可以成为燃烧场诊断中判断温度的依据。时间分辨的方法也被应用在氢气及其瞬态动力学的研究[15],并逐渐被应用到单层及多层石墨烯的CARS 光谱研究中[16]。值得一提的是,时间分辨的CARS 最早于2002年由XIE X S 等提出并应用于显微成像[17],并且抑制CARS 非共振背景的光场调控方法多种多样,我们将在第三节成像部分予以补充。
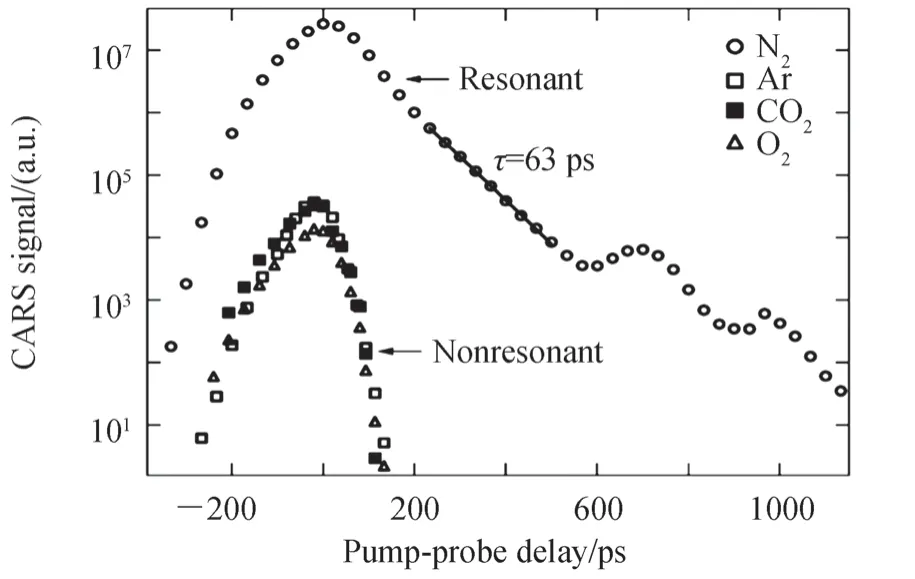
图3 共振信号和非共振背景随泵浦光-探测光延时的演化[14]Fig.3 Relationship between CARS signal components and Pump-Probe Delay
2.3 探测脉冲啁啾调控——single shot CARS
随着激光脉冲从纳秒发展到飞秒,为了获得1kHz 甚至更高的瞬态谱学分析,研究者更倾向于做基于飞秒脉冲的单次(single-shot)光谱测量,此时上述连续调控探测脉冲延时的方法因为过程耗时所以无法适用。2002年LANG T 等提出调控探测光的啁啾(Chirped Probe Pulse,CPP)[18],把探测光在时域上从几十个飞秒拉长至几个皮秒,这样就可以获得相应的几个皮秒时间内拉曼相干态随时间的演化。啁啾调控下的探测光脉冲低频分量先于高频分量作用于样品,因此把采集到的光谱做傅里叶变换可以获得时间分辨CARS 光谱结果,以此可以作为温度推断的依据,实现对瞬态火焰燃烧场的高速光谱采集[19]。这种方法也被应用于其他大数据量且需要高速采集的研究中,例如对于细菌等微生物的光谱研究[20-21]。为了实现single shot 的高频测量,研究人员还提出了一种混合fs/ps 的single shot CARS[22],与CPP 不同之处在于把高啁啾、宽频谱的皮秒探测脉冲替换为窄频谱的皮秒脉冲,两种方法的光谱探测效果相似,但后者相较于CPP 在光谱的数据拟合上更加便捷[23]。
3 光场调控在相干拉曼显微成像中的应用
相干拉曼光谱应用近年来也在追求获得更高分辨率的空间信息,已经有部分研究把单点的CRS 光谱拓展到一维线上[24],再到二维的平面[25-26],但受制于弱聚焦模式,其分辨率依然无法做到几十微米以下。如何把拉曼特异性这一成像衬度应用到高分辨的光学成像应用中,实现无标记的微生物、微结构的显微观察成为了CRS 技术的重要研究方向。
最早的CRS 成像实验可以追溯到1985年,DUNCAN M D 等运用非共线相位匹配方式获得了洋葱表皮细胞的CARS 图像[27],但这种非共线的相位匹配方式以及透镜聚焦的光路配置限制了图像分辨率。一直到1999年,ZUMBUSCH A 等运用近红外光源以共线的相位匹配方式实现了活细胞的CARS 显微成像[28]。采用近红外的激发光源一方面避开了电子态的跃迁,可以抑制非共振背景的干扰;另一方面提高了穿透深度,利于实现厚样品的CARS 成像。该研究还指出利用高数值孔径物镜实现紧聚焦的情况下,相位匹配条件容易满足,并且可以实现三维成像。自此,CARS 显微镜的配置大部分由非共线转向共线,通过对商用共聚焦显微镜或多光子显微镜改装,结合单像素探测器做点扫描的显微成像,CARS 显微术也逐步走向实用[4,29-30]。作为CRS 成像的另一个脉络,SRS 技术首次运用到显微成像上在2008年[6]。由于SRS 在原理上规避了CARS 过程的非共振背景,并且不同于CARS 信号对样品浓度的二次依赖关系,SRS 信号强度与样品浓度有线性的对应关系,在定量分析上也有一定优势,因此在最近十年来获得了迅猛发展[31-40]。相较于CARS,常见的SRS 的光路还需要额外配置斯托克斯光路上的调制器以及信号端的锁相放大器。在CRS 成像应用中有很多技术难点和实验细节通过光场调控方法实现,我们将在下文加以分析。
3.1 时间加啁啾调控
CRS 成像的非线性过程往往需要较高的峰值功率,因此所采用的光源大部分是脉冲光。通过调控脉冲光场的时间和啁啾特性可以对CRS 成像有实质性的帮助。脉冲光的啁啾可以看作是时域和频率的映射关系,调控这一映射关系具有比较丰富的内涵,包括时域的延时和拉伸、频率的剪裁和移动等都在CRS 成像应用中有体现。
3.1.1 时域延迟
利用时域延时方法实现CARS 成像早在2002 就已经被提出[17],VOLKMER A 等通过调控探测光相对于泵浦光、斯托克斯光的延时,实现了非共振背景的有效抑制。该实验展示了聚苯乙烯小球产生的CARS信号相比于水溶液的非共振背景具有更长的退相干时间,因此,相对于泵浦光和斯托克斯光作用于样品的时间零点,把脉冲光时间调节到几百个飞秒后,采集到的光谱里几乎不含有非共振背景,这一方法有效地将信噪比(信号强度与非共振背景之比)提升超过十倍。脉冲光场的时域调控在最近的SRS 成像中也有非常新颖的应用[35],该研究中飞秒的泵浦和斯托克斯激光脉冲相向传播进入样品,一系列的脉冲串在组织的固定深度处重复地相遇形成脉冲光片(pulse sheet),通过调控两束脉冲的相对时间延迟可以获得样品纵向不同深度的SRS 信号,结合振镜在横向做二维扫描即可获得SRS 的三维层析图像。
3.1.2 频域扫描
调控脉冲光场的啁啾特性可以实现高光谱的CRS 成像,即在每一个成像像素上采集到多个光谱成分。高光谱的CRS 成像所用脉冲光主要是皮秒或者飞秒,两者的区别在于前者光谱较窄所以光谱分辨率高,而后者光谱较宽所以能激发多个振转能级,因此在做高光谱成像应用时主要有三种模式:频率扫描、光谱聚焦、多色CARS(multiplex CARS),见图4。

图4 高光谱CRS 成像主要的三种模式[3]Fig.4 Methods of hyperspectral CRS imaging[3]
首先是基于频率扫描的方式,对于入射的两束脉冲光,固定其中一束光的频率并在一定范围内连续调谐另一束光的频率,即可在每个像素点上都能采集到覆盖拉曼特征区域的完整光谱。这两束光可以是窄带的皮秒脉冲[30],也可以是对飞秒脉冲整形后单色性较好的脉冲[36]。这种脉冲整形的技术可以通过光栅把光束色散开,并利用快速移动的狭缝和反射镜不停裁剪出某个频率成分的光送出去,实现快速选频的功能[37]。这种选频方案也可以通过振镜与光栅的4f系统实现[32]。
其次是基于光谱聚焦的方法,这主要通过两个宽带(飞秒)激光束实现。利用光学展宽元件使泵浦光和斯托克斯光获得不同的啁啾量,使得时域重叠的光谱频率成分缩小,让两束脉冲在不同时间重合即可获得不同的频率差,进一步只要连续调控时间延迟即可找到共振频率,或是在共振频率附近进行扫描[38-41]。最近,HE R 等在这种光谱聚焦的模式上充分利用锁相放大器的两个通道实现双色SRS 成像,可以完成对脂肪和蛋白质两类物质同时观察[42]。同时,扫描两个脉冲之间的时间延迟可以做到很快,通过振镜[43]、谐振镜[44]以及六边形反射镜[45]等时间延迟线方案,大大缩短了光谱采集时间,最新的,LIN H 等的研究中采集每张光谱最快只需要20 μs[46]。
多色CARS 最初是通过使用窄带泵浦光和宽带斯托克斯光的方法实现[47,48]。后来随着激光器技术的发展,生成超宽带甚至是超连续的斯托克斯光源的方案不断涌现[49-52],因其对于单个像素可以一次性获得整个光谱,也为快速高光谱成像提供了便利。
3.1.3 频率移动
直接调控脉冲光频率的移动,除了能实现上述高光谱的应用,还可以有抑制CRS 成像噪声的用途。对于抑制CARS 的非共振背景,只需要调制泵浦光和斯托克斯光的差频在共振与非共振之间以一定频率来回切换,由于非共振背景对这样的高频调制没有响应,因此结合锁相放大器可以直接检出调制的CARS 信号[53]。对于SRS 成像应用而言,主要的噪声来源于包括泵浦光和斯托克斯光的竞争、交叉相位调制以及一些电子背景等。这种宽谱的噪声是主流的振幅调制方法无法解决的,而窄带的频率调制不失为一种有效的方案。从早期的在激光器腔内直接调频[54],再到后来的多个商用激光器同步调频[55]。一直到最近XIONG H 等利用脉冲光在单模光纤中的自相位调制,把皮秒斯托克斯光分成两种频率成分,分别对应共振和非共振并以此实现频率调制,这种方法在实用性上有一定优势[8]。得益于频率调制带来的高信噪比,他们在此基础上实现了高对比度、高灵敏度的受激拉曼激发荧光成像,并与受激辐射淬灭成像(Stimulated Emission Depletion Microscopy,STED)集成,相较于其他超分辨拉曼成像方法,使用较低的激光功率实现了更好的分辨率增强[56]。
3.2 偏振调控
CRS 的过程是偏振依赖的,调控入射泵浦和斯托克斯光场的偏振态一方面可以利用样品分子共振信号和非共振背景的解偏率不同实现背景噪声的抑制,另一方面也可以有效揭示样品的极化特性。
偏振调控的CARS 早在2001年由CHENG J X 等用于显微成像[57],其原理如图5所示,对于沿z轴传播且满足共振条件的泵浦和斯托克斯光,调控泵浦光沿x轴线偏振,斯托克斯光偏振方向与x轴夹角为φ。两束光和样品分子作用发生三阶非线性极化效应,产生共振和非共振信号PR、PNR,共振和非共振部分的偏振退化率不同,因而PR、PNR的方向不一致。只要在垂直于非共振信号的偏振方向上加上检偏器,即可有效抑制非共振背景,但是同时也会损失一部分共振信号。
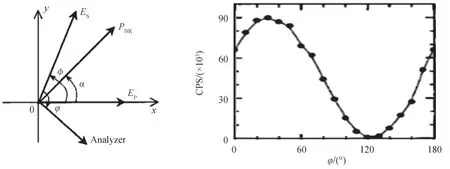
图5 偏振CARS 抑制非共振背景原理图[57]Fig.5 Schematic diagram of polarization CARS suppressing non-resonant background[57]
对入射光场的偏振调控可以有助于获取样品的极化取向等信息,因为对于化学键取向有序的分子,CRS 信号将被极化的激发光大大加强。利用这一想法,CHENG J X 等在2003年设计了偏振CARS 显微镜,观察到水分子氢氧键在磷脂双层膜表面的有序取向[58],同年,CHENG J X 等利用碳氢键的伸缩振动模式获取了组成膜的脂质分子的方向信息[59]。2009年,LU F 等报道了一种激发光为径向偏振的CARS 显微镜[60],实验观察到,在高数值孔径物镜的紧聚焦下,分子沿纵向的CARS 信号强度约为线偏振情况下的三倍,且横向分辨率可提高约10%。研究人员还研发了旋转偏振的CARS 和SRS 显微镜,用于显示大视野范围内全局的偏振极化信息[61-62]。近年来还有工作表明运用圆偏振的激发光可以获得样品分子的对称性信息,这项工作在实现化学特异性成像的同时引入了对称分辨对比度,可以对一些晶体和具有特殊对称性的细胞进行成像[63]。
3.3 相位调控
相位调控是光场调控的重要手段之一,其内涵包括入射光场相位模式的变换和延迟,也包括信号光场的相位处理,同时新型的相位模式也会带来成像效果的提升。
早期的相位调控手段常与外差探测结合,用于抑制非共振背景。能起到相同作用的偏振检测、时间分辨等方法虽然可以抑制非共振背景,但这些技术也会削弱共振信号的贡献,因此不太适合于微弱信号的检测。得益于外差法原理上可以放大微弱信号,外差探测不仅不会削弱信号,而且很适合在很强的背景中提取低浓度样品的CRS 信息,也尤其适用于拉曼指纹区的成像[64]。
自2004年后,EVANS C L 等提出并发展了外差法的CARS 成像技术,他们把CARS 显微镜的架构与马赫-曾德尔干涉仪集成,皮秒的泵浦光束和斯托克斯光束共线合束后,送入马赫-曾德尔干涉仪。其第一路用于在反斯托克斯频率产生强的本振光(local oscillator),并用相位调制器对本振光束进行10 MHz 的调制。干涉仪另一路包括一个压电控制台,用于精确调节两臂之间的路径差。本振光与泵浦光和斯托克斯光合束后直接进入显微镜。在样本中,生成的CARS 场直接与本振场混合。通过移动相位,可以解算实部与虚部的分量[65]。如果调节本振场与CARS 场相位差为90°,结合锁相放大器可以有效提取共振虚部分量,抑制实部非共振背景[66]。2006年,单光束的外差CARS 在宽带的飞秒激光器上也得以实现,该方法结合空间光调制器和飞秒脉冲整形,光路上更加灵活[67]。2008年,对于斯托克斯光束做相位调控的CARS 显微镜也被提出用于提高成像信噪比[68]。
与上述利用本振光实现外差探测类似,利用和CARS 光场频率一致的参考光场可以记录CARS 光场的全息。2010年,SHI K 等提出了一种非扫描的宽场CARS 全息术[69],由于光学参量振荡器可以产生与CARS信号同频的光束,以此作为参考光,可以记录CARS 场全息,进而获得CARS 光场的振幅和相位信息。2015年,LV Yonggang 等在此基础上提出了一种不含非共振背景的CARS 全息振动相位成像技术[70],实现了对CARS 场虚部共振信息的有效提取。
近年来,特殊的相位调控以及脉冲整形技术也被运用到CRS 成像上,通常使用空间光调制器或一些特殊光学元件实现。2018年,GONG L 等在空间光调制器上加载形状为同心圆环的相位图案,并将其应用于泵浦光,可以缩小其焦点光斑,该实验演示了提高横向分辨率和轴向分辨率的成像效果[71]。2020年,HOFER M 等借助空间光调制器做波前整形,赋予了CARS 光束经过散射介质深层聚焦的能力[72]。利用特殊光学元件做相位调控如相位板可以实现分辨率的提高[73]。而利用角锥镜则可以生成贝塞尔光束,因为贝塞尔光束具有抗散射和自愈能力,所以特别适合用作高散射和体样品的CRS 成像[74-76]。2017年,CHEN X等用贝塞尔光束实现了SRS 投影层析[77],运用旋转样品的方案实现了150 μm×150 μm×150 μm 的三维成像,分辨率约为0.83 μm,见图6。

图6 对入射光进行角锥相位调控,生成贝塞尔光束[77]Fig.6 Bessel beam generation by applying an axicon phase to the incident light field[77]
3.4 空间频率调控
调控光场空间频率可以为CRS 成像的分辨率提升提供新的思路。这一想法源于宽场荧光的结构光照明显微镜(Structured Illumination Microscopy,SIM),其原理是已知空间频率的激发光照明样品,可以把原来无法探测的高频信息转化为能探测的低频信息,其中激发光的空间频率通常采用正弦强度调制。基于此,2014年PARK J H 等提出了SIM-CARS 的理论架构[78]。泵浦光经SLM 调制产生的±1 级衍射光在样品平面产生干涉条纹,作为结构光照明,在斯托克斯光相向照射到样品时,理论计算得到CARS 图像分辨率将提升至原来的三倍。
近年来,在CRS 研究中,部分研究者通过调制空间频率编码时空信息,实现了灵活快速的光谱采集和显微成像。2015年,LIAO C S 等设计了一种频率复用的微秒级光谱成像方案[79]。泵浦激光器的每一个特定波长都被调制成特定的兆赫频率。通过SRG 过程,调制频率转移到斯托克斯光束中。利用面探测器在时域记录斯托克斯光强时间轨迹,并进行快速傅里叶变换可获得SRS 光谱。该方法把单张光谱采集速度提升至60 μs。2020年,HEUKE S 等用空间频率调控的聚焦线对样品进行线照明,聚焦线上的空间频率随时间在不断变化,该频率调制编码了一维线上的空间位置信息[80]。使用单像素探测器即可获得一维CARS 信号强度轮廓,结合样品移动可以获得二维图像采集。该方法相比于扫描式的CARS 成像具有较好的信噪比和更快的成像速度。2021年,同样的空间频率调控思路被应用到SRS 成像上并以此对样品z向不同深度进行编码[81-83],在这项研究中,样品z方向上的激发光场以一定的空间频率分布,且该分布频率随时间变化,这一变化的空间频率由加载在SLM 上的特殊角锥相位产生,见图7。面探测器上接收的信号时间序列经过傅里叶变换可以反映出样品不同深度的SRS 信号,结合二维振镜横向扫描即可完成SRS 三维层析成像。这项工作一方面不需要z向的扫描,成像速度上略有提高;另一方面运用角锥相位产生的贝塞尔光束,使成像深度相较于普通SRS 成像至少提高了两倍。
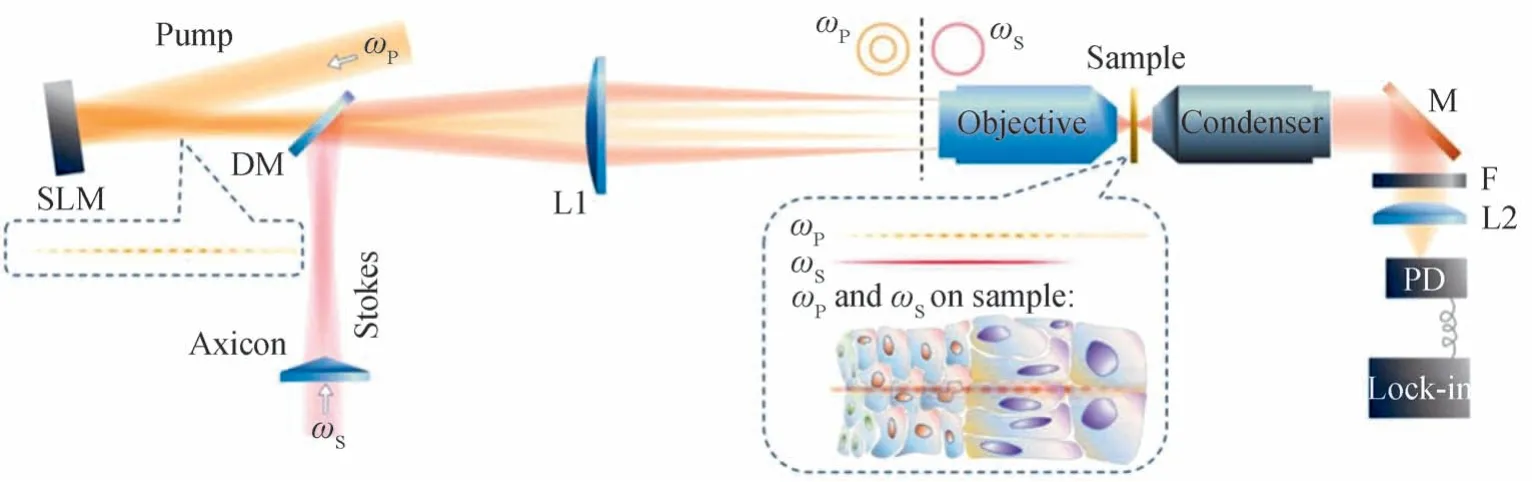
图7 SLM 上动态加载的相位图可以有效调控泵浦光在样品处z 方向的空间频率,从而编码深度信息[81]Fig.7 The phase pattern on the SLM can dynamically control the spatial frequency of the pump light along z direction of the sample,thereby encoding depth information[81]
4 结论
相干拉曼散射光谱和成像应用依赖于多个光子的非线性光学过程,极大地丰富了光场调控手段。同时从光场的一个维度到多个维度、从单一的调控方法到充分调动频率、相位、偏振等多种手段相结合,逐渐成为新的研究趋势。以超分辨相干拉曼成像中的焦斑调控为例,既可以与STED、SIM 等波前调控思路相结合,也有利用相位调控产生贝塞尔光束提高深层分辨率的应用,最新研究表明,结合新型探针可以可逆地实现相干拉曼成像的“开-关”状态切换[82],这与传统超分辨成像在深层机理上是相通的。另一方面在基础科学的驱动下,新型光场调控方法不断涌现,使得突破传统信噪比、降低光毒性成为可能,赋予相干拉曼应用新的内涵[83]。在面对化学、生物、医学实际应用提出新挑战时,依托各种灵活的光场调控技术,相干拉曼散射光谱与成像应用正向着高时空分辨率、高光谱分辨率、高穿透深度和高灵敏度逐步推进。
