竹林皆伐机路径规划系统设计及计算机仿真
2022-02-22王慧崔生乐杨春梅
王慧,崔生乐,杨春梅
竹林皆伐机路径规划系统设计及计算机仿真
王慧,崔生乐,杨春梅
(东北林业大学 机电工程学院,哈尔滨 150040)
设计一种中幼竹林皆伐机路径智能规划系统,实现伐竹机伐竹的路径规划功能,使伐竹机可以遍历需要伐竹的全部节点并避开障碍。针对中幼竹林皆伐的特点,探讨一种迪杰斯特拉及A*混合算法,用于解决伐竹机路径规划中的路径优化问题。通过C语言编程,来建立一种基于改进的迪杰斯特拉及A*混合算法的中幼竹林皆伐机路径智能规划系统仿模型,并使用C++编程,实现系统模型的仿真,并调用Windows GDI实现仿真结果的显示。仿真结果显示,采用文中建立的中幼竹林皆伐机路径规划系统进行伐竹机的路径规划,实现了伐竹路径规划的目标,且相较直接采伐的路径,伐竹机伐竹总里程降低了47.6%,节省了伐竹机伐竹总里程,大大提升了伐竹效率。文中所讨论的改进的迪杰斯特拉及A*混合算法可以实现伐竹路径规划的功能,路径规划系统可以求得最优伐竹路径的一个近似解。
中幼竹林;皆伐;路径优化;计算机建模;仿真
竹子是再生植物,具有繁殖能力强、生长周期短、材质优良等特性[1]。我国是世界上竹类资源最丰富的国家。根据第九次全国森林清查结果显示,中国竹林面积超过600万hm2,因而,竹材在林业行业中占有举足轻重的地位。随着环保意识深入人心,越来越多的国内外学者开始研究竹材包装替代塑料包装,来减少白色污染[2-5]。我国竹产业发展面临的问题有:产业竞争无序、采用人工采伐效率低下、成本较高等。在竹林尤其是毛竹采伐时,采用按照确定的宽度、面积对竹林进行条带式皆伐,即带状采伐,可以提高伐竹机械化水平,实现毛竹等竹制品行业产业升级。国内外学者对于伐竹机械化的研究有:于航、傅万四等[1]设计了一种以往复锯切割方式的丛生竹择伐机等伐竹机械;杨春梅、张振宇等[2]提出了一种自走式轻型竹材采伐机的设计方案。李晓晓、王茂安等[5]设计了一种手持式竹林采伐机。国内外学者的其他研究还有竹材加工当中的表面质量问题等[6],为提升伐竹的机械化及自动化水平设计一种中幼竹林宽幅伐竹机智能路径规划系统,实现伐竹机的路径规划对提升伐竹机伐竹效率、实现竹制品行业产业升级有重要作用,因此,文中探究一种用于伐竹的路径优化算法,设计一种基于该算法的中幼竹林宽幅皆伐机的路径智能规划系统,利用计算机实现该系统的计算机建模与仿真。
1 竹林皆伐方式
在我国,典型的天然黄竹林中黄竹丛丛径为2~3 m,黄竹丛间距为7~10 m。每丛20~30杆。黄竹林内,往往混生有少量的热带季雨林以及季雨林的乔木类树种[7-9]。
竹林皆伐是指将竹林伐区内的成熟竹材,在一定时间内一次性伐光或几乎全部伐光的方式。皆伐分为全面皆伐、块状皆伐以及带状皆伐种。块状皆伐指,将伐区分为若干块较小的伐区,只采伐或者间隔采伐其中的一部分地块的方式。带状皆伐是指,对竹林上的竹材,保留一带,伐倒一带的伐竹方式[10]。从皆伐后竹林生长情况看,带状皆伐2年后竹林生长最好,块状次之,全面皆伐最差,并且,最有利于竹林生长的最大皆伐分块大小为16 m×16 m[11-13]。从竹林生长恢复的角度考虑,带状皆伐最为有利,然而,带状皆伐使得伐竹过程行走路径较大,不利于提升伐竹效率,并且如果采用带状皆伐,竹林保留带内的竹材被视作障碍物,也不利于路径智能规划系统的规划及寻找最优路径。因而,文中所研究的中幼竹林宽幅皆伐机的智能路径规划系统采用的伐竹方式为块状皆伐,皆伐目标区域为16~24 m。竹林皆伐路径规划的约束条件:除边界信息,起始点坐标外,其余地图信息未知,伐竹机探测器一次只能探测3~5 m内的情况,白色区域可以自由移动,红色区域不可以动。竹林皆伐路径规划的目标:伐竹机路径由规定的起点最终到达规定终点;伐竹机需遍历绿色区域,即砍伐地图区域内的全部竹材实现皆伐;伐竹机路径规划应尽可能短,以提升皆伐效率。
2 实现竹林皆伐路径规划的算法探究
路径优化算法是解决路径规划问题的核心。常见的路径优化的算法有A*算法、混合粒子群算法[14-15]、惩罚函数法[16]、迪杰斯特拉算法、蚁群算法[17]、仿生自然水系算法等[18]。
2.1 A*算法
A*算法是一种启发式算法,该算法引入了最优启发式函数,通过计算和比对当前节点的周边节点的启发式函数值,从而确定移动的下一个节点。当移动到下一节点后,将此节点重新作为当前节点,重复上一步骤,从而实现AGV机器人的不断前进,直至到达目标节点。A*算法简单示意见图1。
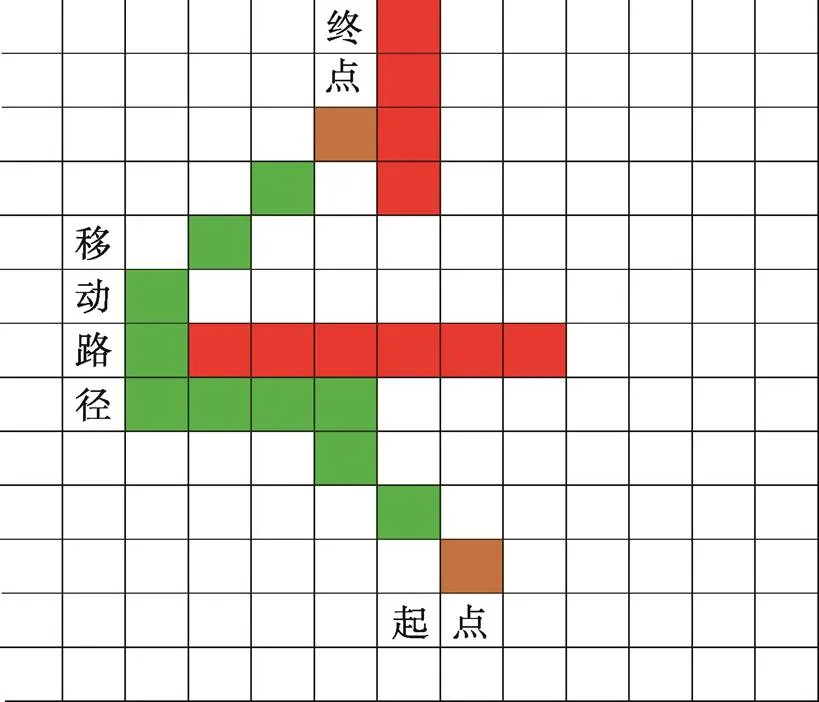
图1 A*算法示意
A*算法的启发式函数式为:
f()=g()+ h()
A*算法的优点:作为启发式算法,允许机器人边探路边规划路径;可以实现自动避障。
A*算法的缺点:只能实现起到终点的路径规划,不能够实现地图目标节点的遍历;用A*算法规划路径不一定路径最优;A*算法计算量大,规划效率低。
2.2 迪杰斯特拉算法
Dijkstra算法即迪杰斯特拉算法是由荷兰科学家狄克斯提出了一种遍历算法。该算法将带权的地图中的节点分为2个集合,分别为和其中,集合包含已经找到最短路径的节点,集合中存放没找到最短路径的节点。Dijkstra是将集合中的点,按照最短路径逐渐递增的顺序,逐个将集合中的节点加入到集合当中,直到全部的点加入集合,从而实现地图目标节点最短路径遍历的目标[20]。
迪杰斯特拉算法优点:可以实现地图目标节点的遍历。
迪杰斯特拉算法缺点:迪杰斯特拉算法虽然可以实现目标节点测遍历,但该算法在路径规划时,要求机器人已完全知晓地图全局信息,因而不适合机器人在陌生地图中,边探知地图信息边规划路径的情形。
2.3 改进的迪杰斯特拉及A*混合算法
由文中2.1节知,A*算法作为启发式算法,只能实现起始点到目标节点的路径规划,无法实现目标节点遍历,且计算量大,规划效率低。由文中2.2节知,迪杰斯特拉算法虽然能够实现目标节点遍历,但迪杰斯特拉算法要求地图已知,不适合探索式路径规划,因此文中针对竹林皆伐路径规划的特点,提出一种改进的迪杰斯特拉及A*混合算法,以实现竹林皆伐的路径规划。
改进的迪杰斯特拉及A*混合算法由如下步骤组成。
为深化医药卫生体制改革,强化医院的公益性质,我院依托精细化管理手段,建立了以总额预算管理为基础,兼顾质量与效益的内部绩效考核体系。根据现代医院发展特点,特别强化了针对病种管理的系列管理指标,综合考虑质量、成本、服务水平和工作效率等因素,充分体现多劳多得、优绩优酬的分配原则。通过动态可调的绩效分配方案与矩阵式量化模型,使绩效考核体系可作用于过程管理与持续改进,不断提升医院的业绩、效率与效果。激发医务人员积极性,提供优质高效服务,并减少医疗资源浪费,减少政府医保基金与患者个人负担,充分体现医院的公益性。
1)由于伐竹机探测器范围为3~5 m,因此该算法第1步根据竹林地图大小进行分块,分块大小最大为5 m×5 m。
2)读取分块内目标节点(地图绿色区域)坐标数据,并根据下一分块方位选择终点,如果终点不再下一分块边界处,则将下一分块边界处靠近此点的最近点作为终点。
3)主要对当前分块内各个目标节点排序,以确定从起始点遍历各目标节点最终到达分块内终点的遍历顺序,并确保路径最优。
4)根据第3步确定的顺序规划节点遍历具体路径并合理避开障碍。
5)到达下一分块内的边界处,扫描下一分块数据并重复第1步直到伐竹机到达竹林地图的终点完成本区块的伐竹作业。
该算法第3步融合了A*算法和迪杰斯特拉算法的特点,是该算法的核心部分。算法第3步实现方法如下。
类似于迪杰斯特拉算法,改进的迪杰斯特拉及A*算法也是将遍历节点分成和2个集合,并逐步地将中的点加入到当中。类似于A*算法,该算法赋予当中的点以启发函数,通过判断启发函数的数值,将数值较大的放入中。
改进的迪杰斯特拉及A*混合算法启发函数为:
f() = 200+h()+m()−g()
g()为目标节点到当前节点的距离。考虑该算法第2步,确定了分块内的起点和终点,显然,算法第3步确定的遍历顺序应该满足从起点先逐渐遍历离终点较远的点,再逐步靠近终点的原则,从而有利于缩短伐竹遍历的总路径,因此该算法引入了h()、m() 2个远端优先加权数。当分块内的目标节点在当前目标节点2 m内时,m()值为0,h()按照分块内的总体移动方向,为分块内目标节点到分块终点的纵向或横向距离乘以远端系数1。同理当分块内的目标节点在当前目标节点2 m外时,h()值为0,m(𝑛)按照分块内的总体移动方向,为分块内目标节点到分块终点的纵向或横向距离乘以远端系数2,且1>2。取1>2是为了选择加入的下一节点是按照逐步朝向离分块最远点,且不遗漏离当前节点较近的节点。当迪杰斯特拉及A*混合算法将中目标节点中f()值最大的节点加入后,就将新加入的节点作为新的当前节点,重新计算其余中目标节点的f()值,并重新判定,直到将中全部节点及终点纳入中。
如上所述,改进的迪杰斯特拉及A*混合算法,同时具有2种算法的特点。与迪杰斯特拉算法相同的是,该算法将目标节点分为和2个集合,并通过将中的节点逐步添加入的方式,实现区域内节点的遍历。与A*算法相似且区别于迪杰斯特拉算法的是,每当中的一个节点加入后,都需要将新加入的节点作为当前节点,重新计算中的剩余节点的函数权重值,并重新排序,因而改进的迪杰斯特拉及A*混合算法相比于迪杰斯特拉算法,其权重函数值是动态的,且由于远近端系数的引入,使得该算法可以实现定终点路径规划的功能。
3 中幼竹林宽幅皆伐机路径智能规划系统的计算机建模仿真
3.1 仿真方法选择
文中采用C/C++进行混合编程,具体是:在Dev-C++5.11环境下用C语言实现文中所述伐竹机路径规划系统的建模、实现核心算法即迪杰斯特拉及A*混合算法并进行基本测试;在Visual Studio 2017环境下用C++语言编程,建立简单的窗口程序,作为文中所建立的伐竹机路径规划系统的运行环境进行仿真,并调用Windows GDI将仿真结果显示在窗口程序当中。
3.2 地图模型及数据
如图2所述,地图模型为矩形,矩形被分割成边长相同的正方形,每个正方形边长视为实际竹林当中的1 m,竹林当边界处中不足1 m的区域近似为一个方格。白色方各表示表示该小格可以移动。红色表
示该小格中心点为原点,半径0.5 m范围内有障碍物,若障碍物半径大于0.5 m将占据更多的小格。绿色表示表示该小格中心点为原点,半径0.5 m范围内有竹材,若竹材半径大于0.5 m将占据更多的小格,数值为3的小格即为路径规划需要遍历的目标节点。
如图3所示,伐竹机路径规划系统模型采用二维数组来存放地图数据,并用多个结构体来进行数据读取。其中,二维数组下标表示地图小格坐标点。地图二维数组的数值可以为1、2、3。数值1与地图中的红色小格对应。数值2与地图中白色小格对应,数值3与地图中绿色小格对应。

图2 地图模型
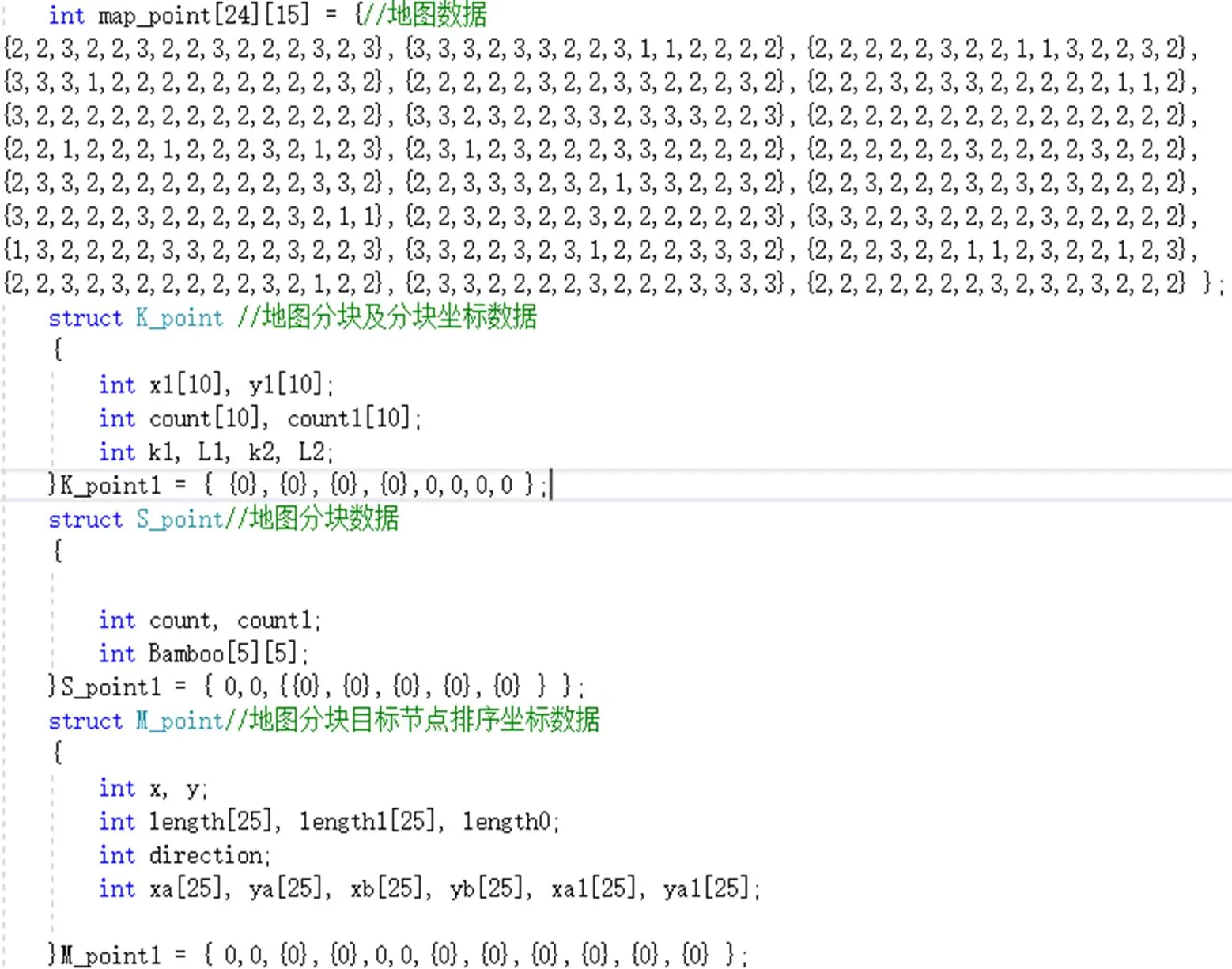
图3 地图数据
3.3 改进的迪杰斯特拉及A*混合算法程序
1)分块数据采集。伐竹机路径规划系统读取分块内数据采集的代码见图4,每次采集的地图数据限定在以当前节点为中心,最远5个方格的数据,以模拟伐竹机探测器探测距离的限制。
2)算法第2步是改进迪杰斯特拉及A*混合算法的算法核心。如图5,通过引入新的启发函数,来实现分块内目标节点的排序。为了保证分块内节点排序按照从起点逐步移动到距离分块内终点最远点在逐步靠近终点的顺序,改进的迪杰斯特拉及A*混合算法要求系数1>2。经过多次测试,取系数1=15,2=5可以满足要求。
3)节点移动并避开障碍。路径规划系统规划节点间具体路径时,避开横向障碍的实现代码见图6。
3.4 Windows 窗口程序和GDI调用代码
在Windows窗口程序主函数中,用图7中所示代码运行文中建立的伐竹机路径规划系统模型的函数。如图8所示,文中用me_Init、me_Paint函数进行Windows GDI调用的初始化准备工作并进行初始化显示。
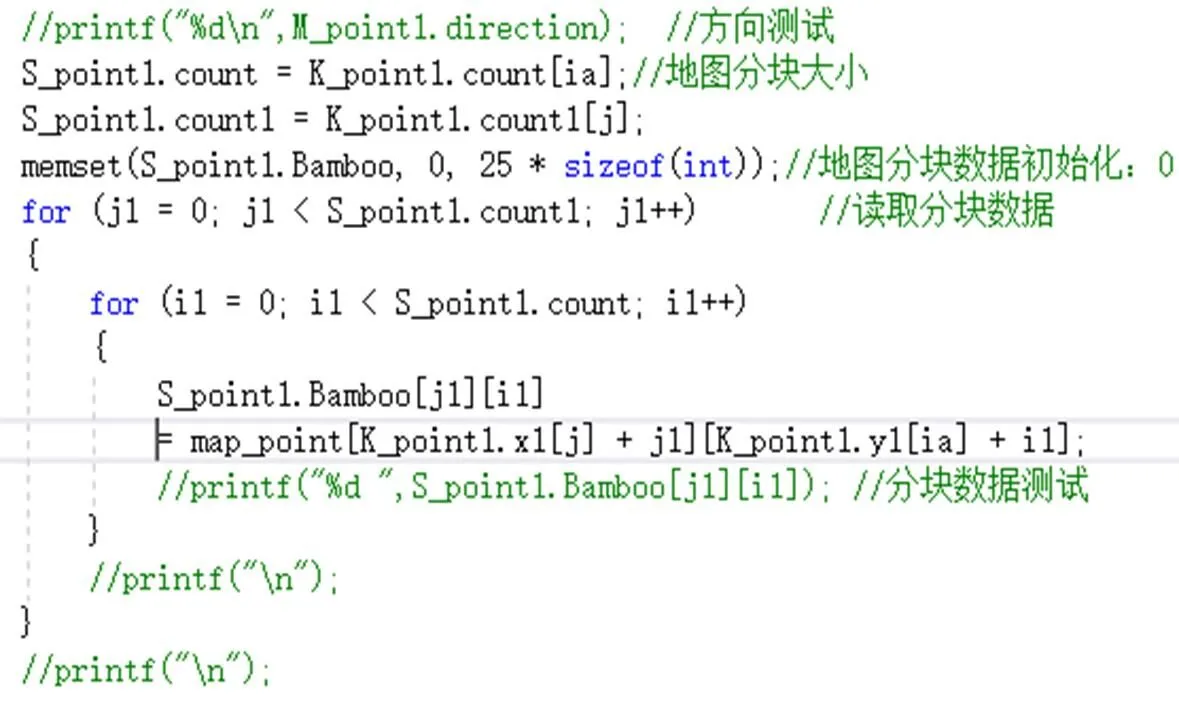
图4 分块数据采集

图5 算法第3步算法核心

图6 横向避开障碍物代码

图7 调用伐竹机路径规划系统函数
最后文中将建立并测试完毕的伐竹机路径规划系统模型的代码拷贝入图9所示me_RePaint函数中进行仿真运行,用图9中所示me_RePaint函数中的代码将仿真结果显示在窗口函数中。
3.5 仿真结果及对比
文中建立的中幼竹林宽幅皆伐机路径智能规划系统模型的路径规划仿真结果,见图10。其中,粉色线条代表了伐竹机从左下角起点运动到右上角终点的运动轨迹。如图10可知,文中建立的伐竹机路径规划系统成功地规划出满足第3.1节要求的路径。不采用路径规划算法时,伐竹机的伐竹路径仿真结果见图11。从仿真结果图来看,采用文中提出的算法进行路径优化后伐竹机伐竹总移动距离应有较大降幅。
如图12所示,左侧是采用中幼竹林宽幅皆伐机路径智能规划系统即使用文中提出的改进的迪杰斯特拉及A*混合算法进行路径规划的伐竹机路径仿真结果数据,右侧是不采用路径规划算法的伐竹机路径仿真结果数据。数据包含伐竹机移动的总距离、伐竹数量以及伐竹机移动的主要节点的坐标。

图8 GDI调用初始化及初始化显示

图9 仿真结果显示代码

图10 中幼竹林宽幅皆伐机路径智能规划系统模型仿真结果

图11 不采用路径规规划算法的仿真结果
由于文中建立的中幼竹林宽幅皆伐机路径只能规划系统在按照探测距离进行分块后的每个地图分块内分别进行的路径规划,因此,将伐竹机移动路径距离按照分块进行统计,结果见图13。显然,采用文中提出的算法进行路径优化后,在每个分块内,伐竹机移动路径都比不采用算法优化时伐竹机移动路径小,最终使得伐竹机总移动路径减小。
从仿真结果看,采用文中提出的路基优化算法进行优化,伐竹机总移动距离为192.5 m,伐竹机总伐竹数为100,实际值为97。这是由于分块内终点不在分块边界时,为了探测下一个分块内信息,伐竹机将移动到分块边界处,此时,边界上的新终点被记录为目标节点造成的。不采用算法进行优化时,伐竹机总移动距离为367.2 m,伐竹总数为97。对比数据发现,采用文中设计的伐竹机路径规划系统进行路径规划后,伐竹机总移动距离下降了47.6%,伐竹效率有明显提升。

图12 仿真数据
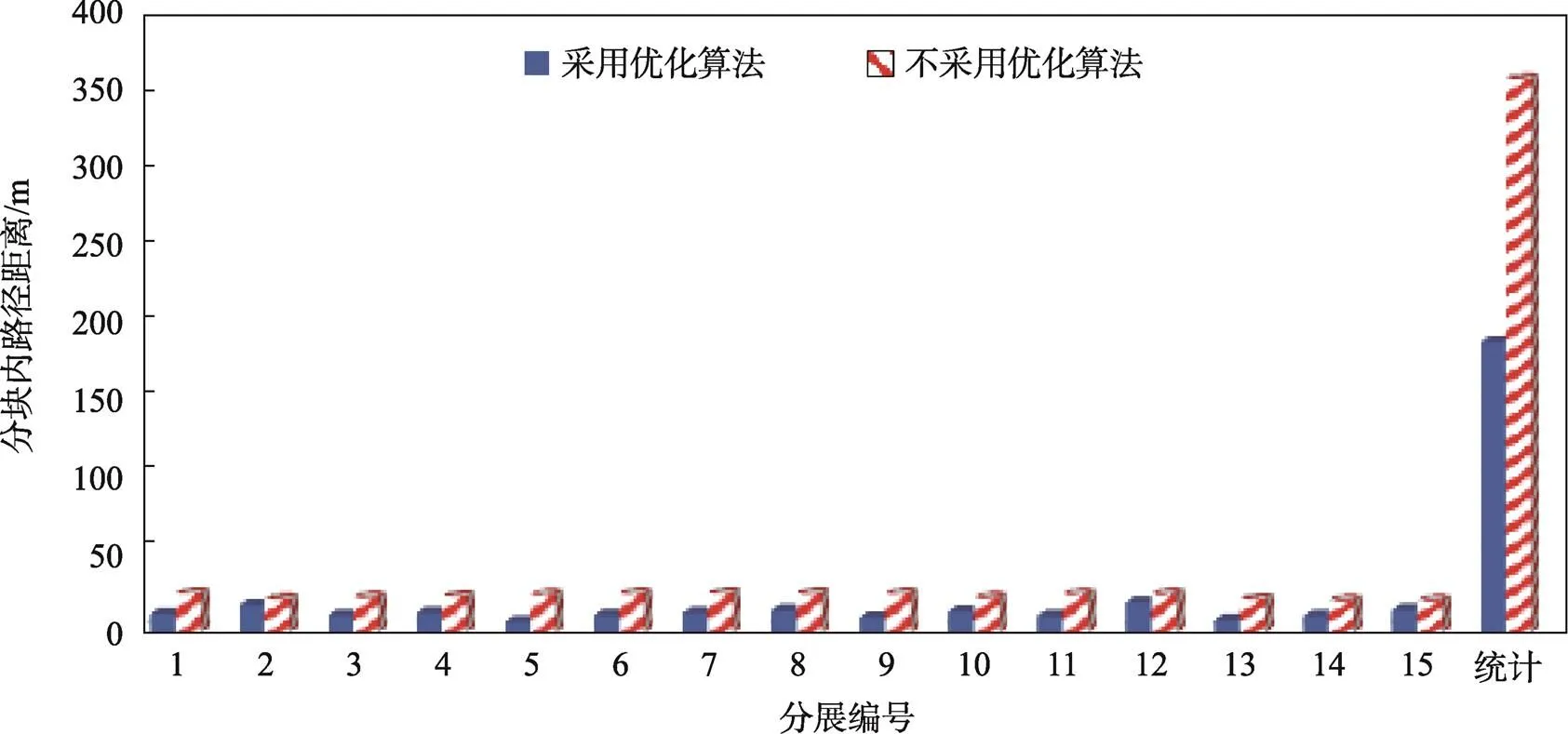
图13 分块内移动路径统计
4 展望
文中建立的中幼竹林宽幅皆伐伐竹机路径智能规划系统,规划路径时,若分块内终点不在分块边界,为了探测下一个分块内信息,伐竹机将移动到分块边界处,此时,边界上的新终点被记录为目标节点,最终导致伐竹机记录的伐竹总数有所偏差。为了满足伐竹机探测器探测距离最大为5 m的要求,文中所述改进的迪杰斯特拉及A*混合算法实现了分块内的节点遍历顺序优化。分块边界移动至下一分块边界的过程没有进行核心算法的优化,因而,分块边界处的路径可能不是最优路径。由于仿真次数的限制,文中所述改进的迪杰斯特拉及A*混合算法的算法核心所引入的远端系数1、2可能不是最优值,从而使得路径优化结构不是最优解。期望这些问题能够在今后的研究中得以解决,从而设计出更好的路径规划系统。
5 结语
通过仿真结果可知,文中建立的中幼竹林宽幅皆伐伐竹机路径智能规划系统在第3.1节所确定的约束条件内,可以实现伐竹路径规划的功能。采用文中提出的迪杰斯特拉及A*混合算法作为伐竹机路径规划系统的路径优化算法是可行的,且此算法实现了伐竹机遍历全部目标节点、避开障碍物以及路径优化的功能。通过仿真结果对比,采用文中建立的中幼竹林皆伐机路径规划系统进行伐竹机的路径规划,可以实现预期目标,相较于直接采伐,伐竹机伐竹总里程降低了47.6%,节省了伐竹机伐竹总里程,大大提升了伐竹效率。
[1] 于航, 傅万四, 张长青, 等. 基于往复锯方式的丛生竹择伐机设计[J]. 林业机械与木工设备, 2019, 47(4): 11-14.
YU Hang, FU Wan-si, ZHANG Chang-qing, et al. Design of Cluster Bamboo Selective Cutting Machines Based on Reciprocating Saws[J]. Forestry Machinery & Woodworking Equipment, 2019, 47(4): 11-14.
[2] 杨春梅, 张振宇, 马岩. 自走式轻型竹材采伐机的设计与分析[J]. 林产工业, 2019, 46(6): 23-28.
YANG Chun-mei, ZHANG Zhen-yu, MA Yan. Design and Analysis of Self-Propelled Light Type Bamboo Cutting Machine[J]. China Forest Products Industry, 2019, 46(6): 23-28.
[3] 时迪, 王逢瑚, 于文吉. 重组竹材在现代家具设计中的应用研究[J]. 包装工程, 2013, 34(8): 62-66.
SHI Di, WANG Feng-hu, YU Wen-ji. The Study on the Application of Recombinant Bamboo in Modern Furniture Design[J]. Packaging Engineering, 2013, 34(8): 62-66.
[4] 戴武军, 谭益民. 以竹代塑新产品竹微丝复合包装材料的制备及其性能[J]. 世界竹藤通讯, 2020, 18(6): 21-24.
DAI Wu-jun, TAN Yi-min. Preparation and Properties of Bamboo Microfilament Composite Packaging Material for Replacing Plastic[J]. World Bamboo and Rattan, 2020, 18(6): 21-24.
[5] 李晓晓, 王茂安, 杨涛, 等. 手持式竹林采伐机设计[J]. 成都大学学报(自然科学版), 2020, 39(2): 199-203.
LI Xiao-xiao, WANG Mao-an, YANG Tao, et al. Design of Hand-Held Bamboo Cutting Machine[J]. Journal of Chengdu University, 2020, 39(2): 199-203.
[6] HAI L, CHOI E S, ZHAI L, et al. Green Nanocomposite Made with Chitin and Bamboo Nanofibers and Its Mechanical, Thermal and Biodegradable Properties for Food Packaging[J]. International Journal of Biological Macromolecules, 2020, 144: 491-499.
[7] LVHA B, ESC A, LZ A, et al. Green Nanocomposite Made with Chitin and Bamboo Nanofibers and Its Mechanical, Thermal and Biodegradable Properties for Food Packaging Science Direct[J]. International Journal of Biological Macromolecules, 2020, 144: 491-499.
[8] YLA B, JZA B, WF A, et al. Study on the Effect of Cutting Parameters on Bamboo Surface Quality Using Response Surface Methodology[J]. Measurement, 2021, 174: 109002
[9] CHEN Z, LI Y, CHANG S X, et al. Linking Enhanced Soil Nitrogen Mineralization to Increased Fungal Decomposition Capacity with Moso Bamboo Invasion of Broadleaf Forests[J]. The Science of the Total Environment, 2021, 771: 144779.
[10] 明曙东, 粟星宏, 顾扬传, 等. 毛竹天然混交林空间结构特征研究[J]. 世界竹藤通讯, 2016, 14(5): 1-6.
MING Shu-dong, SU Xing-hong, GU Yang-chuan, et al. Study on Spatial Structure of Natural Moso Bamboo Mixed Forest[J]. World Bamboo and Rattan, 2016, 14(5): 1-6.
[11] LIU Xiao-jie, HU Xia. Discussion on the Effect of the New Cutting Mode of Neosinocalamus Affinis Forest in Sichuan Area on Bamboo Forest Construction[J]. {IOP} Conference Series: Earth and Environmental Science, 2018, 170: 022128.
[12] RAY S S, ALI M N. Factors Affecting Macropropagation of Bamboo with Special Reference to Culm Cuttings: a Review Update[J]. New Zealand Journal of Forestry Science, 2017, 47(1): 1-8.
[13] 谭宏超, 李正权, 谭汝强. 皆伐对细叶龙竹林分生长的影响研究[J]. 世界竹藤通讯, 2017, 15(5): 20-23.
TAN Hong-chao, LI Zheng-quan, TAN Ru-qiang. Effect of Dendrocalamus Membranaceus Cv. Grandis Forest Clear-Cutting on Stand Growth[J]. World Bamboo and Rattan, 2017, 15(5): 20-23.
[14] 申景昕, 范少辉, 刘广路, 等. 毛竹林采伐林窗近地层温度时空分布特征[J]. 生态学杂志, 2020 39(11): 3549-3557.
SHEN Jing-xin, FAN Shao-hui, LIU Guang-lu, et al. Spatiotemporal Distribution Characteristics of Temperature on the Surface Layer of Cutting Gap of Phyllostachys Edulis Forest[J]. Chinese Journal of Ecology, 2020, 39(11): 3549-3557.
[15] 杨红果, 谷利芬. 基于混合粒子群算法的农业机器人全局路径规划研究[J]. 农机化研究, 2021, 43(10): 33-36.
YANG Hong-guo, GU LI-fen. Research on Global Path Planning of Agricultural Robot Based on Hybrid Particle Swarm Optimization[J]. Journal of Agricultural Mechanization Research, 2021, 43(10): 33-36.
[16] HE Wen-jian, QI Xiao-gang, LIU Li-fang. A Novel Hybrid Particle Swarm Optimization for Multi-UAV Cooperate Path Planning[J]. Applied Intelligence, 2021, 51(10): 7350-7364.
[17] 李清亮, 李彬, 孙国皓, 等. 基于精确罚函数的无人艇航迹规划和自动避障算法[J]. 中国舰船研究, 2021(1): 89-95.
LI Qing-liang, LI Bin, SUN Guo-hao, et al. Trajectory Planning and Automatic Obstacle Avoidance Algorithm for Unmanned Surface Vehicle Based on Exact Penalty Function[J]. Chinese Journal of Ship Research, 2021(1): 89-95.
[18] NISHA R, RAJENDER C S. Optimization of Favourable Test Path Sequences Using Bio-Inspired Natural River System Algorithm[J]. Journal of Information Technology Research (JITR), 2021, 14(2): 85-105.
[19] 王保剑, 胡大裟, 蒋玉明. 改进A^(*)算法在路径规划中的应用[J]. 计算机工程与应用, 2021, 57(12): 1-6.
WANG Bao-jian, HU Da-sha, JIANG Yu-ming, et al. Application of Improved A* Algorithm in Path Planning[J]. Computer Engineering and Applications, 2021, 57(12): 1-6.
[20] LU Li, GAO Jia-wei. Research on Aircraft Taxiing Path Optimization Based on Digraph Model and Dijkstra Algorithm[J]. IOP Conference Series: Materials Science and Engineering, 2021, 1043(4): 042045.
Design and Computer Simulation of Path Planning System for Bamboo Clearing Machine
WANG Hui, CUI Sheng-le, YANG Chun-mei
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China)
The work aims to design an intelligent path planning system for young and middle-aged bamboo clearing machines, achieve the cutting path planning of bamboo clearing machines to cover all nodes requiring cutting and avoid barrier. Aiming at the characteristics of clearing of young and middle-aged bamboo forests, a Dijkstra and A* hybrid algorithm was discussed to solve the path optimization problem in path planning of the bamboo cutting machines. Through C language programming, an imitation model for the path planning system of the young and middle-aged bamboo clearing machine was established based on the improved Dijkstra and A* hybrid algorithm, and C++ programming was used to realize the simulation of the system model and call Windows GDI to realize the display of simulation results. The simulation results showed that using the path planning system of the young and middle-aged bamboo clearing machine established in this paper for path planning of the bamboo cutting machine can achieve the goal of the cutting path planning. Compared with the direct cutting path, the total mileage of the bamboo cutting machine was reduced. It saved 47.6% of the total bamboo cutting mileage of the bamboo cutting machine and greatly improved the bamboo cutting efficiency. The improved Dijkstra and A* hybrid algorithm discussed in this paper can realize the function of bamboo cutting path planning, and the path planning system can obtain an approximate solution of the optimal bamboo cutting path.
young and middle-agedbamboo forest; clearing; path optimization; computer modeling; simulation
TP27
A
1001-3563(2022)03-0217-11
10.19554/j.cnki.1001-3563.2022.03.027
广东省重大专项研发计划(2020B020216001);中央高校基本科研业务费专项资金项目(2572020DR12)
王慧(1965—),女,东北林业大学副教授,主要研究方向为木工机械。
杨春梅(1977—),女,博士,东北林业大学教授,主要研究方向为林业与木工机械。
2021-07-07
