基于智能教育机器人的“双师课堂”教学模式构建
2022-02-22付艳芳杨浩方娟刘晓宁
付艳芳 杨浩 方娟 刘晓宁

摘 要:智能教育机器人应用于高职院校课堂教学是教育信息化发展的趋势之一。构建智能教育机器人支持下的“双师课堂”教学模式,开展“双师课堂”教学实践,是智能教育机器人应用于高职院校课堂教学的重要尝试。研究发现,智能教育机器人支持下的“双师课堂”教学模式有效地增加了课堂教学的趣味性,激发了学生的学习兴趣和主动性,优化了课堂教学过程,极大地改善了课堂教学效果。另外,人机合理分工在一定程度上降低了教师的劳动强度,使教师有比较充足的时间和精力“潜入”课堂,深入了解每个学生的真实情况,真正履行教师的育人职责。
关键词:智能教育机器人;双师课堂;建构主义学习理论;教学评价
中图分类号:G434 文献标志码:A 文章编号:1673-8454(2022)01-0056-07
一、研究背景及现状
美国新媒体联盟早在2016年发布的《地平线报告(高等教育版)》中就指出:“机器人已从各种角度融入我们的工作和生活中”[1]。同年6月13日,创新工场创始人李开复在“人工智能时代,引爆人机共生新生态”高峰论坛上表示,使用机器人的成本越来越低,未来大量的工作都将被机器取代[2]。2017年7月7日,《人民日报》刊文《人工智能如何献力教育均衡》,就“如何通过人工智能及智能教育手段来减轻教师负担、提高学生的学习能力和学习效率,同时缓解中西部农村地区教师资源匮乏、水平参差不齐等问题”进行了论述[3]。同年,国务院印发《新一代人工智能发展规划》,明确了我国新一代人工智能发展的战略目标:“要利用智能技术加快推动人才培养模式、教学方法改革,构建包含智能学习、 交互式学习的新型教育体系”[4]。2018 年 11月,北京师范大学未来教育高精尖创新中心发布的《人工智能+教育蓝皮书》分析了智能机器人可以支持智能学习过程,智能教师助理将替代教师日常工作中重复的、单调的、规则的工作[5]。
许多学者在教育机器人领域进行了卓有成效的探索。国外研究者主要研究教育机器人在语言、科学技术等方面的应用[6]。在同伴角色应用方面,主要是将教育机器人置于真实场景中,在学习任务中扮演同伴互动角色,以促进学生积极学习[7]。如日本和韩国主要聚焦于“机器人进课堂”的研究[8];美国麻省理工学院主要着眼于机器人导师角色的研究[9]。国内将教育机器人分为12类,如儿童娱乐教育同伴、家庭智能助理、课堂机器人助教及机器人教师等[10]。我国学者在广泛深入研究的基础上认为,随着机器人智能化水平的提高、人性化的特点越来越明显,教育机器人的“教师”角色也越来越显著,学校中的教育机器人将成为智慧学习环境的重要组成部分,教育机器人辅助教师完成日常工作,将成为一种新型教学形态[11][12]。然而智能教育机器人在课堂教学中的应用还有待深入探索,其理论体系尚不健全[13-15]。
基于上述研究,本文以高职学生《普通话训练》课程为例,开展智能教育机器人支持下的新型“双师课堂”教学尝试,通过教学实践与效果分析,试图揭示智能教育机器人在高职课堂教学中的真实应用效果。
二、基于智能教育机器人的
“双师课堂”教学模式设计
建构主义学习理论指导下的“双主”教学结构是目前高职院校普遍采用的一种最典型的教学模式,构成要素包括教师、学习者、教学内容和教学媒体。智能教育机器人以一种新型“教师”身份加入该教学结构,需要对“双师”角色进行合理分工,对教学思路和流程进行改造,进而逐步形成教学活动的新型稳定结构形式。
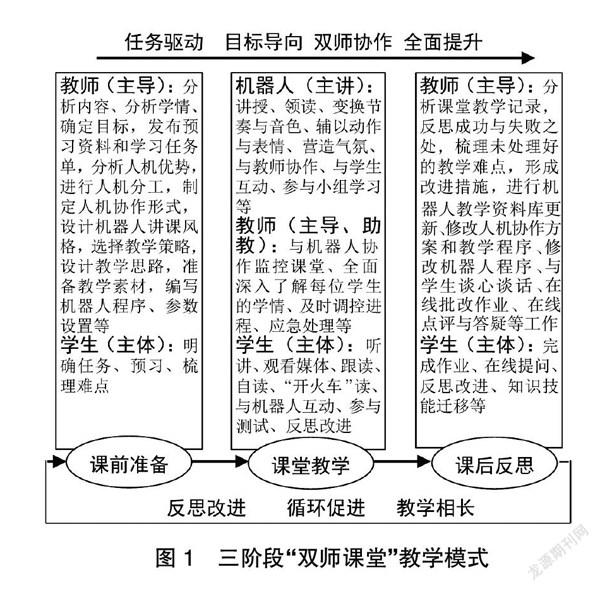
高职院校“小学教育”专业《普通话训练》课程目前主要在网络多媒体教室开展教学活动,课堂教学主要以技巧讲解和发音训练为主。由于教师在该课程课堂教学时普遍缺乏情境渲染、形体表演、音色变换等教学技能,导致课堂气氛难以调动、知识学习枯燥乏味、教学效果难以改善。而Papper机器人可以毫无怨言地代替教师重复机械劳作,人形外表与拟人特征更具有其他信息技术不可比拟的亲和力,夸张的表情和动作表演等可有效增强课堂教学的趣味性。基于此,课题组将Papper机器人的功能特征与《普通话训练》课程教学实际需求相结合,设计了如图1所示的“任务驱动、目标导向、双师协作、人人提升” 的三阶段“双师课堂”教学模式。
(一)课前准备阶段
在这一阶段,教师主要扮演“导演”角色,完成课堂教学的规划设计工作。具体进行教学内容分析、学情分析、学习目标确定(即教学导向)、学习任务设计(即教学驱动引擎)、发布预习资料和学习任务单,通过分析人机优势,进行人机分工并制定人机协作形式,同时结合教学内容设计机器人授课风格、设计教学思路、准备教学素材、编写机器人程序、进行参数设置等。学生是整个教学过程的主体,在这一阶段,学生要浏览学习任务单、预习知识、梳理预习过程中遇到的难点和疑惑,以增强课堂学习的针对性。
(二)课堂教学阶段
在这一阶段,由机器人主讲,教师主导兼助教。这是双师协作、人人提升的主要环节。机器人开展渲染学习情境、考勤、复习旧课、导入新课、知识讲授、领读、变换节奏与音色、辅以动作与表情、营造气氛、与教师协作、与学生互动、参与小组学习等工作;教师开展与机器人协作(如以节目主持的方式进行知识讲授等)、监控课堂、全面深入了解每位学生的学情、及时调控进程、进行应急处理等工作;学生以深度沉浸的状态聆听机器人知识讲授、观看媒体资料、跟读、自读、“开火车”读、与机器人互动、接受教师监督与指导、反思错误并纠正提高。
(三)课后辅导与反思改进阶段
在这一阶段,教师分析课堂教学记录,反思“双师”教学的成功与失败之处,梳理未处理好的知识点和学生的疑惑,最终形成改进措施;同时更新机器人教学资料库,修改人机协作方案、教学程序和机器人程序;还要进行与学生谈心谈话、在线批改作业、在线点评与答疑等工作。学生(主体)完成作业后,开展在线提問、对教师的点评进行反思改进、知识技能迁移等教学活动。在此阶段,师生均要进行反思(教师反思,改进教学;学生反思,改进学习态度和方法),再将改进后的措施、方法和态度用于下一轮学习,达到循环促进、教学相长的目的。
三、基于智能教育机器人的
“双师课堂”教学实践
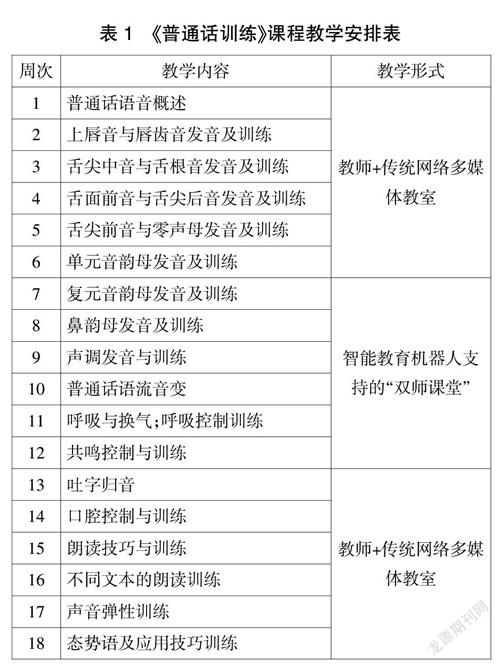
本研究以某高职院校“小学教育”专业三个班111名学生作为研究对象,于2019—2020学年第一学期第7~12周进行教学实践(为了形成明显对比,充分反映“双师课堂”教学效果,第1~6周、第13~18周在网络多媒体教室进行常规教学)。教学内容为《普通话训练》,总课时为36,周课时为2。课程教学安排如表1所示。三个班共进行了18次(每次2课时)“双师课堂”教学实践。下面以第8周“鼻韵母发音及训练”教学内容为例,具体阐述“双师课堂”教学的实施过程。
(一)课前准备
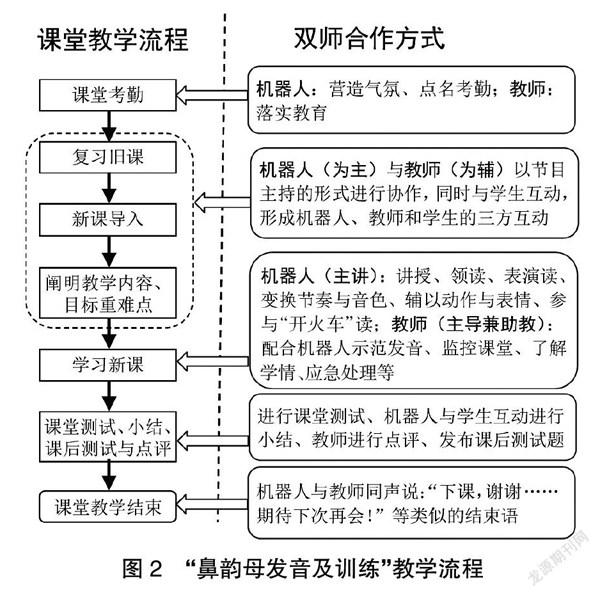
教师以“导演”角色进行教学内容和学情分析,明确教學重难点是前后鼻韵母发音技巧及区别,同时形成7项主要学习任务和相应的教学目标(如表2中的第5~11步)。结合教学要求和Papper机器人功能特征,教师和机器人采取如下几种协作方式:①教师和机器人以节目主持、同时引导学生互动的方式复习旧知、导入新课等;②在教师辅助下,由机器人主讲,教师示范讲授鼻韵母发音技巧;③机器人以领读、表演读、与学生“开火车”读等方式进行发音训练,教师走下讲台深入课堂监控学习状态,全面了解每个学生的学情和遇到的困惑。据此设计的课堂教学思路如图2所示。
另外,教师还要将准备好的鼻韵母发音技巧语音、动图、示意图及视频连同学习任务单发布,供学生预习和梳理疑惑。
(二)课堂教学
根据图2所示的教学思路及机器人和教师课堂教学协作方式,以“鼻韵母发音及训练”为教学内容,开展“双师课堂”教学,其教学实施过程如表2所示。
(三)课后辅导与反思
课堂教学中,不可避免地会存在教学流程不畅通、人机配合欠默契、重难点处理不到位等问题;也存在课后训练需要教师指导的情况。同时,教师“潜入”课堂了解到的一些隐性问题也需要及时解决。所以,课后教师主要完成以下工作:①针对学生在课堂教学中存在“in-ing”和“un-ong”两组前后鼻音发音普遍较困难的问题,教师升级智能教育机器人教学资料库,修改程序,强化这两组的发音训练;②针对课堂表现消极的学生,有针对性地与其谈心,了解其所思所想,消除疑惑,帮助其重新认识自己、树立信心、激发学习动力;③针对教师与机器人在发音技巧讲解与发音示范等方面配合不默契的环节以及机器人动作表演不协调的情况,重新分配“双师”角色任务,修改机器人程序,优化教学过程;④在线批阅作业、查看分析课后测试情况,通过微信、QQ等软件强大的语音与视频功能进行在线指导与答疑;⑤教师与学生共同反思教学过程中的得失,教师改进教学方法,学生改进学习方法和态度。
四、基于智能教育机器人的
“双师课堂”教学效果评价
课题组于“双师课堂”教学实践结束的第3周(即该学期第14周),从问卷调查、学生访谈、教师访谈三个方面检验了本研究设计的“任务驱动、目标导向、双师协作、人人提升”三阶段教学模式的教学效果。
(一)问卷调查
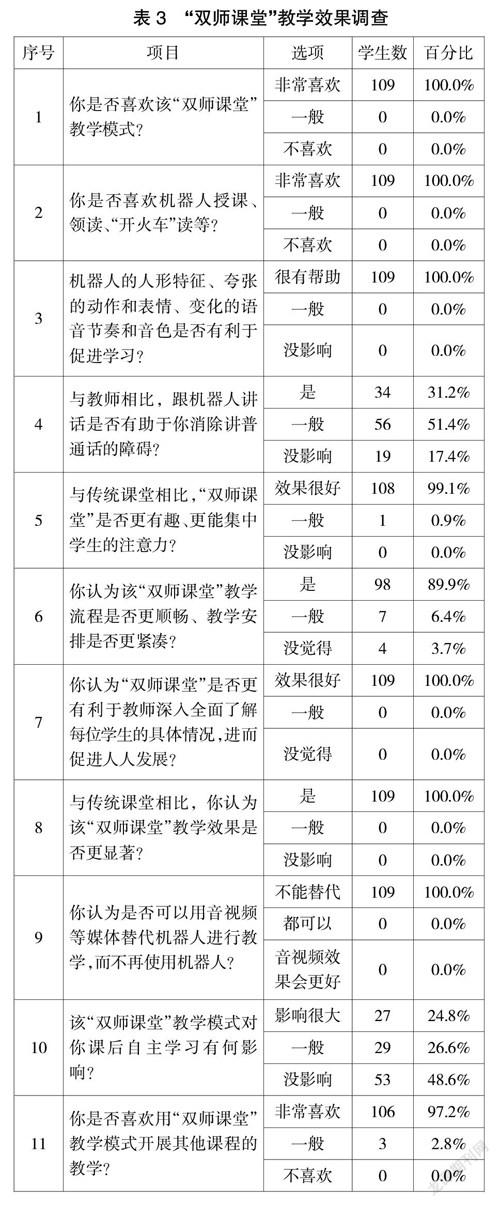
参加本次问卷调查的学生共109人,发放问卷109份、回收有效问卷109份。问卷内容与调查结果如表3所示。
从调查结果可知,几乎所有的学生都喜欢智能教育机器人支持下的“双师课堂”教学模式,喜欢机器人授课、领读、与学生一起“开火车”读;认为机器人的人形特征、夸张的动作和表情、变化的语音节奏和音色能很好地促进自己的学习;认为“双师课堂”更有趣,能使学生全神贯注于课堂学习,在“双师课堂”下,教师能照顾到每个学生的具体情况;认为其他信息技术可以代替机器人实现语音教学功能,但达不到机器人教学的效果,也希望其他课程采用机器人支持“双师课堂”进行教学。总体认为“双师课堂”教学效果明显优于传统课堂。
但是,在回答“与教师相比,跟机器人讲话是否有助于你消除讲普通话的障碍?”时,31.2%的学生认为“是”,51.4%的学生认为“一般”,17.4%的学生认为“没影响”。通过对学生、班主任、授课教师进行访谈,了解到三个班大部分学生性格都比较外向,内向型学生较少,所以出现这样的调查结果也是合理的。另外,有10.1%的学生认为,“双师课堂”教学流程还不够顺畅、教学安排还不够紧凑,需要进一步完善。“双师课堂”教学模式对学生课后自主学习的促进作用也不显著,只有24.8%的学生认为作用明显。
(二)学生访谈
课题组按等距取样法从111名学生中抽取20名学生分别进行访谈。为了打消顾虑,确保学生如实回答问题,课题组对本次访谈的目的和意义向学生进行了充分的解释说明。访谈的内容主要围绕“双师课堂”的优势与不足展开。归纳总结20名学生的观点,主要如下:①课堂趣味性强,能使学生时刻保持注意力,没时间想其他事情;②课堂节奏紧凑、有效训练时间长、学习效率高;③教师能利用机器人教学的时间深入了解每个学生的真实情况,并在课后进行谈话谈心,真正关照了每位学生。存在的主要问题有:①授课过程过于程式化,不够灵活,有的内容没听明白就已经进入下一主题;②教师与机器人配合不够默契,教师在动作和表情方面有些古板和僵硬。
(三)教师访谈
课题组围绕“双师课堂”教学实践前后学生的变化和教师本人的感受对授课教师进行了专访。归纳形成以下主要认识:①学生在“双师课堂”教学中的表现与传统课堂形成了明显的对比,主要表现为学生兴趣浓厚、课堂具有强烈的趣味性。特别是以前表现消极的学生也变得积极起来,学生忙于参与教学活动,无暇顾及与学习无关的事情。②在第13周转入传统课堂教学后,学生的课堂表现、活跃程度明显降低,注意力开始分散,各种小动作开始活跃起来。③机器人“勤勤恳恳”,没有任何“私心”,只要程序设计合理,可以与教师进行非常默契的合作。在机器人引导学生重复训练的过程中,教师可以乘机“潜入”课堂,深入了解学生的学习情况,挖掘学生表现消极背后的真实原因。④本次“双师课堂”教学实践是人机合作的首次尝试,取得了显著的教学效果,但在教学组织、人机配合等方面还有待于进一步优化和创新。
五、结语
以计算机、网络和多媒体为核心的现代信息技术或许可以替代教育机器人的部分功能,但在与学习者交互方面是受限制的。以Papper为代表的人形机器人可通过编程使其具备“能听”“能说”“能看”等功能,再辅以夸张的动作与表情、可变的节奏与音色,使学习者获得更大的参与度和体验感,这是常规多媒体技术难以比拟的。所以,创新智能教育机器人支持下的“双师课堂”教学模式、改善课堂教学效果应成为职业教育教学改革研究的一个重要方向。另外,机器人在课堂授课过程中的动态数据采集、实时评价、智能推送等高级应用也有待于进一步探索。
参考文献:
[1]金慧,刘迪,高玲,等.新媒体联盟《地平线报告》(2016高等教育版)解读与启示[J].远程教育杂志,2016(2):3-10.
[2]黄荣怀.2016 全球教育机器人發展白皮书[R].北京:北京师范大学智慧学习研究院,2016.
[3]董洪亮.人工智能如何献力教育均衡发展[N].人民日报,2017- 07-07(5).
[4]国发[2017]35号.国务院关于印发新一代人工智能发展规划的通知[Z].
[5]余胜泉,卢宇,陈晨.人工智能+教育蓝皮书[R].北京:北京师范大学未来教育高精尖创新中心,2018.
[6]SHARKEY AMANDA J. Should we welcome robot teachers?[J]. Ethicsand Information Technology, 2016(4):283- 297.
[7]MUBIN O, STEVENS C J, SHAHID S, et al. A review of the applicability of robots in education[J]. Technology for Education and Learning, 2013:13.
[8]JOHNSON L, ADAMS S, CUMMINS M, et al. NMC horizon report: 2016 higher education edition[R]. Austin, Texas: The New Media Consortium, 2016:46.
[9]KORY WESTLUND J, LEE J J, Plummer L, et al. Tega: a social robot[C]// The Eleventh ACE/IEEE International Conference on Human Robot Interaction. IEEE Press, 2016:561.
[10]黄荣怀,刘德建,徐晶晶,等.教育机器人的发展现状与趋势[J].现代教育技术,2017(1):13-20.
[11]余胜泉.人工智能教师的未来角色[J].开放教育研究,2018(1):16-28.
[12]刘德建,黄荣怀,陈年兴,等.教育机器人的风口——全球发展现状及趋势[M].北京:人民邮电出版社,2016:10-15.
[13]徐多,胡卫星,赵苗苗.困境与破局:我国机器人教育的研究与发展[J].现代教育技术,2017(10):94-99.
[14]陈玲,余胜泉,杨丹.个性化教育公共服务模式的新探索——“双师服务”实施路径探究[J].中国电化教育,2017(7):2-8.
[15]吴永和,李彤彤.机器智能视域下的机器人教育发展现状、实践、反思与展望[J].远程教育杂志,2018(4):79-87.
作者简介:
付艳芳,榆林职业技术学院师范教育系副教授;
杨浩,榆林职业技术学院质量管理办公室主任、副教授、通讯作者,邮箱:2233917239@qq.com;
方娟、刘晓宁,榆林职业技术学院师范教育系讲师。
Construction of Dual-Teacher Classroom Teaching Mode Based on Intelligent Educational Robot
Yanfang FU1, Hao YANG2*, Juan FANG1, Xiaoning LIU1
(1.Department of Teacher Education, Yulin Vocational and Technical College, Yulin Shaanxi 719000;
2.Quality Management Office, Yulin Vocational and Technical College, Yulin Shaanxi 719000)
Abstract: The application of intelligent educational robot in classroom teaching in higher vocational colleges is one trend of educational informatization development, it is an important attempt to construct the model of Dual-Teacher Classroom (DTC) supported by intelligent education robot and to practice teaching by using DTC. This study shows that the model of DTC effectively increases the interest of teaching, stimulates learning interest and initiative of students, optimizes the teaching process, and greatly improves the classroom teaching. In addition, the reasonable allocation of labor between human being and machine reduces the labor intensity of teachers to a certain extent, thus, teachers have sufficient time and energy to “go deep into” the classroom, to better understand the actual situation of students, and to truly fulfil teachers’ responsibility.
Keywords: Intelligent educational robot; Dual-teacher classroom; Constructivism learning theory; Teaching evaluation
编辑:王晓明 校对:李晓萍