二维展开太阳翼地面展开试验装置设计与验证
2022-02-21任守志商红军贾文文管帅郑树杰姚迪王宁
任守志 商红军 贾文文 管帅 郑树杰 姚迪 王宁
(1 北京空间飞行器总体设计部,北京 100094)(2 北京卫星制造厂有限公司,北京 100094)
一维展开太阳翼展开过程中各电池板的质心均在同一个平面内,通过吊挂点始终在水平面内的地面展开试验装置完成地面展开试验,这种方式简单、可靠,广泛应用于一维展开太阳翼[1-3]。随着技术的发展,高分辨率遥感卫星对太阳翼展开刚度要求越来越高,一维展开太阳翼已无法满足其要求,大型通信卫星对功率需求也越来越高,因此出现了二维展开太阳翼,这种太阳翼展开后惯量小,在同等质量的情况下具有更高的展开基频,但二维展开太阳翼展开过程中电池板的质心位置在水平面内和竖直面内均有运动,这给二维展开太阳翼地面展开试验时的重力卸载提出了较大的挑战[4-6]。
国外较早开展了二维展开太阳翼的研制,在遥感卫星领域快鸟-2(Quickbird-2),世界观测(WorldView)卫星均采用了3块电池板并联构型的二维展开太阳翼;在通信卫星领域,泰雷兹-阿莱尼亚公司为SpaceBus卫星新平台研制的太阳能平台(SolarBus)[7],波音公司研制的BSS 702平台均采用了二维二次展开太阳翼,单翼最多可配置10块电池板[8],但这些太阳翼的地面展开试验装置均未见报道。
我国上海实达实业公司针对某二维展开太阳翼提出了地面展开试验装置的专利[9],专利所述装置在每个电池板上施加配重用于平衡太阳翼重力,且使用数量较多的导轨用于引导太阳翼的展开,方案相对复杂,为简化太阳翼地面展开重力卸载,本文设计了一种适用于二维展开太阳翼的地面展开试验装置,并对其在某二维太阳翼上的使用情况进行了分析和验证。
1 某二维展开太阳翼简介
某高分辨率遥感卫星采用了二维展开太阳翼方案,此太阳翼包括3块电池板,中心板与2块侧板外形尺寸相同,均为2200 mm×1200 mm,如图1所示[10]。
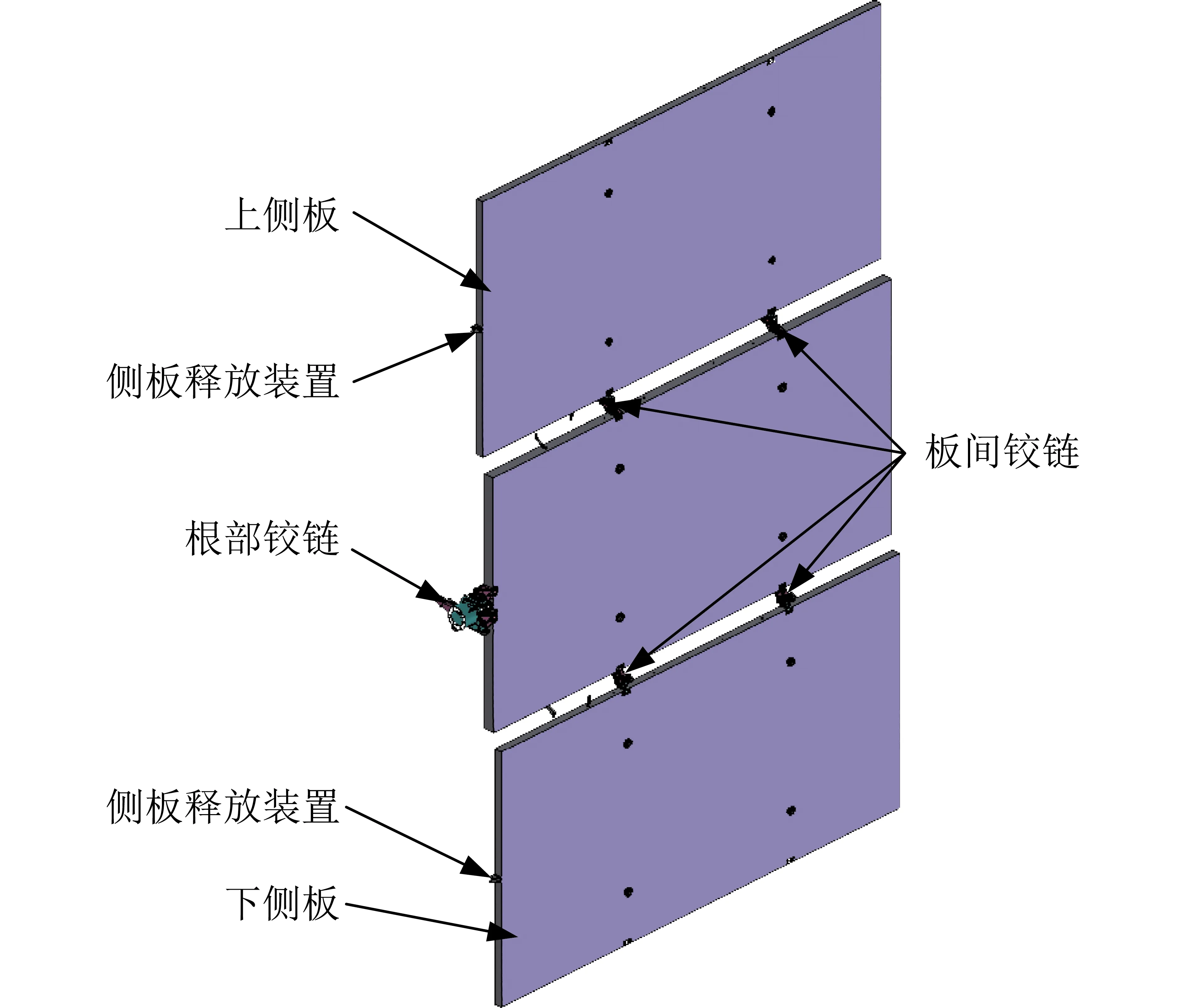
图1 某二维展开太阳翼组成(展开状态)
二维展开太阳翼的展开过程分两步:首先,压紧释放装置释放对太阳翼的约束,与中心板相连的根部铰链驱动3块电池板一次展开,在此过程中,3块电池板通过侧板释放装置连接在一起;其次,当根部铰链即将展开到位时,根部铰链触发侧板释放装置解锁,二次展开开始,上、下侧板在侧板铰链的驱动下分别展开180°并锁定。太阳翼在轨展开过程如图2所示。

图2 某二维太阳翼在星体上的展开过程示意图
由图2(f)可知,太阳翼两次展开过程中中心板的质心在平面内,但上、下侧板的质心既有水平面内运动,也有竖直面内的运动,这给二维太阳翼的地面展开过程中的重力卸载造成了较大的困难。
2 二维太阳翼地面展开试验装置设计
为实现二维太阳翼地面展开过程中的重力卸载,本文设计了一种二维太阳翼重力卸载装置,它原理简单,使用方便,且可以实现二维太阳翼在地面展开过程中各电池板的重力卸载。
2.1 设计原则
二维太阳翼地面展开试验时,地面试验装置需要尽量实现太阳翼各部件在任意位置的重力卸载,能够使太阳翼各部件在零重力/零重力矩环境下的运动,不能引入主动力,尽量减小地面设备对太阳翼展开过程的影响[11]。
2.2 二维太阳翼展开过程中主要构型变化
由图2(a)~(c)可知,太阳翼在一次展开过程中3块电池板收拢叠合在一起,整体质心仅在水平面内变化,且整体绕根铰转轴作定轴转动,因此太阳翼一次展开过程中通过绳索连接绕定轴转动的杆件实现3块板整体的重力卸载;太阳翼二次展开过程上、下侧板分别向上和向下运动,两者质心均不在水平面内运动,运动轨迹为绕侧板铰链轴线的圆弧运动,上、下侧板展开过程轨迹如图3所示。

图3 二维太阳翼上、下侧板二次展开轨迹外轮廓
侧板铰链分别与上、下侧板和中心板相连,侧板铰链转轴与各电池板之间相对位置关系如图4所示。

图4 二维太阳翼上、下侧板二次展开前后位置及侧板铰链转轴位置
2.3 展开试验装置组成
由图3可知,太阳翼上、下侧板展开轨迹均为圆弧,而且上、下侧板外形尺寸完全相同,质量也相同,上侧板向上翻转,下侧板向下翻转,因此设计了一种通过上、下侧板质量互相平衡的装置实现太阳翼的地面展开[12],如图5所示。
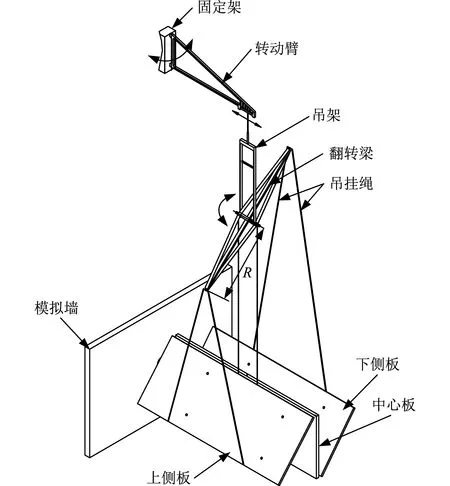
图5 太阳翼重力卸载装置与太阳翼的连接关系
此太阳翼重力卸载装置包括固定架、转动臂、吊架、翻转梁、吊挂绳、绳索长度补偿块。固定架为放置在地面上的刚性构架,转动臂通过转轴与固定架相连且可绕固定架上的转轴转动,在太阳翼一次展开过程中承受三块电池板以及吊架、翻转梁等部件的质量,从而实现太阳翼各部件在水平面运动时的重力卸载。吊架与转动臂的外侧相连,翻转梁与吊架下端通过转轴连接,上、下侧板吊挂绳索一端分别与翻转梁上下端部连接,另一端与上、下侧板的侧边固连的绳索长度补偿块相连;中心板吊挂绳索一端与中心板相连,另一端与翻转梁转轴连接。
由于上、下侧板展开前后位置在竖直方向并不在一个面内,因此需要通过绳索长度补偿块实现其重力卸载,所设计的上、下侧板二维展开重力卸载工装与各电池板的连接关系如图6所示。
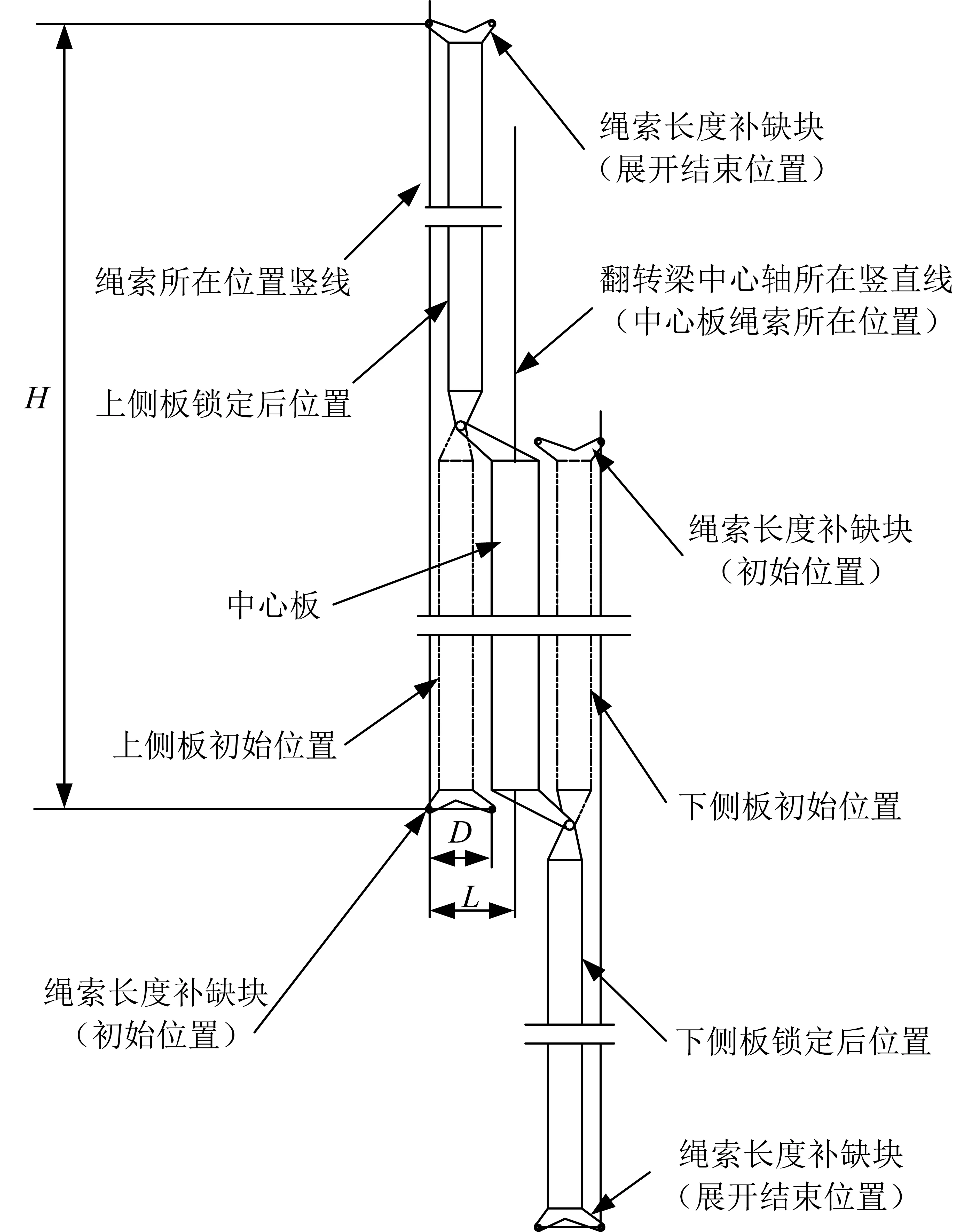
图6 二维太阳翼上、下侧板重力卸载原理
为实现上、下侧板在展开前后绳索中张力保持不变,上、下侧板绳索长度补偿块的长度应保证上、下侧板展开前后,上、下侧板吊绳在与上、下侧板垂直的竖直面上的投影重合。翻转梁上、下侧板连接点与翻转梁转轴之间的长度为R,如图5所示,其长度应满足
(1)
式中:H为上、下侧板在展开前后吊挂点在竖直方向上的位移,D为绳索长度补偿块与绳索两接触点的宽度;L是侧板吊挂绳索与中心板吊挂绳索在与板面垂直的面上投影线的距离。
在实际使用时,上、下侧板吊绳、中心板吊绳中均设置预紧力,其中上侧板吊绳、下侧板吊绳的预紧力的大小分别等于上侧板、下侧板重力的一半,中心板吊绳中的预紧力等于上、下侧板重力之和的一半与中心板的重力以及上、下侧板铰链的重力之和,此设计可实现上、下侧板在展开过程中的重力矩平衡。
3 重力卸载装置使用过程动力学分析
为验证二维太阳翼地面展开试验装置设计的合理性,需要建立二维太阳翼和地面展开试验装置的地面动力学联合分析模型,获取太阳翼展开过程中各电池板重力卸载情况,从而分析此地面展开试验装置设计的有效性。
3.1 动力学模型
用NASTRAN有限元软件计算了中心板和上、下侧板正交化的固定界面模态(Craig-Bampton),并把其柔性体信息导入ADAMS软件中,然后建立了各部件的连接关系,并根据铰链实测驱动参数建立了太阳翼的展开动力学模型以及第2节介绍的二维太阳翼地面展开试验装置的模型,并根据试验装置的实际质量及弹簧刚度等数据设置模型相关数据。另外,由于在地面展开,模型中还考虑了运动部件摩擦力、空气阻力等影响因素[2]。
太阳翼在展开试验装置上的动力学模型如图7所示,模型中电池板为柔性体,转动臂、翻转梁、吊架、长度补偿块等都为刚性体,翻转梁与电池板之间用弹簧元连接,弹簧根据所连接电池板质量设置预紧力。其中弹簧刚度为2 N/mm,各绳索中的初始吊挂力见表1。
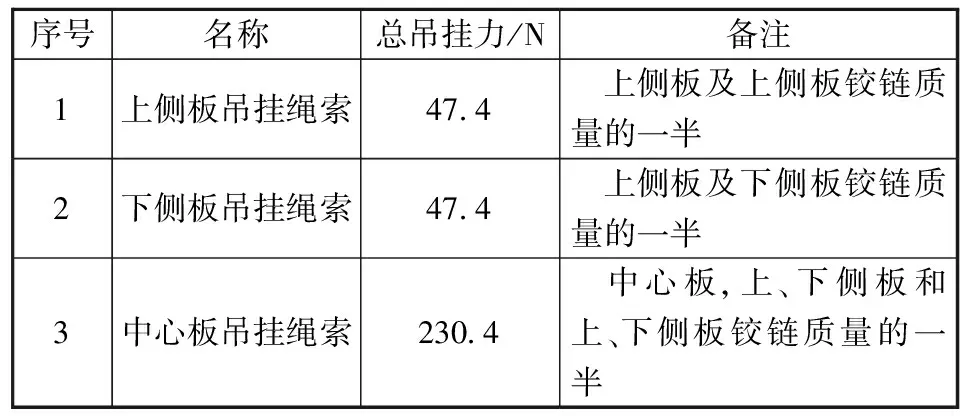
表1 各电池板吊挂绳索中的力
图7 二维展开太阳翼地面展开试验动力学模型
为减少工装在使用过程中的变形,对各工装进行了加强设计,各工装的实际测量的质量见表2,模型中根据工装实际质量进行设置。

表2 模型中与太阳翼相连的工装重量
3.2 动力学分析结果
对建立的动力学模型进行了仿真分析,分析结束时间从初始到上、下侧板均锁定结束后再仿真24 s,在此时间段内观察上、下侧板绳索中张力的变化规律,以验证展开试验装置对上、下侧板重力卸载的效果。太阳翼在地面展开试验装置上展开仿真过程如图8所示。
图8 太阳翼地面展开过程仿真
根部铰链在太阳翼展开锁定过程中锁定冲击力矩如图9所示。

图9 太阳翼展开过程中根部铰链锁定冲击力矩曲线
由图9可知,太阳翼在一次展开锁定时间为17.0 s,二次展开锁定时间为26.6 s,且与实际产品地面展开试验数据基本一致。中心板、上侧板、下侧板吊挂绳索中的张力分别如图10、图11和图12所示。
图10 中心板吊挂绳索中张力

图11 下侧板吊挂绳索中张力
图12 上侧板吊挂绳索中张力
由图9~12可知,在根部铰链锁定前,即17.0 s之前,吊挂绳索中的张力保持稳定,中心板张力保持在230.4 N,上、下侧板中绳索张力均保持在47.4 N。在根部铰链锁定时,由于翻转梁和转动臂、吊架处于运动状态,且存在较大的惯性,而与上、下侧板相连的中心板在根部铰链转动方向上被限制,导致与上、下侧板和翻转梁相连的绳索张力在短时间内变化较大,但很快恢复,在上、下侧板上下翻转过程中(见图8(c)),由于翻转梁、转动臂惯性的存在,绳索在中间展开过程中张力略有变化,下侧板变化范围为45.6~47.9 N,上侧板变化范围为44.0~45.9 N,最大变化量仅为3.4 N,变化量约7%,而中心板绳索张力最大变化量约为5 N,变化量仅2.1%。
当上、下侧板铰链锁定前后,由于侧板展开速度的增加以及翻转梁惯性的影响,导致绳索中张力变化很大,上侧板和下侧板绳索中张力变化范围分别达到33~73 N和41~56 N,而太阳翼展开稳定后,上、下侧板绳索中张力稳定在46.5 N和47.8 N,与初始预紧力47.4 N的张力十分接近,最大变化量不超过2%,中心板吊挂绳索张力最终稳定在230.7 N,与初始230.4 N基本相同,说明本二维太阳翼展开试验装置可以实现中心板及上、下侧板的重力卸载。
4 地面试验验证
某二维太阳翼使用了本文设计的地面展开试验装置,如图13所示,太阳翼地面展开过程正常,太阳翼4次地面展开时间在25.56~28.6 s之间,太阳翼在展开装置上的展开过程如图14所示[10],太阳翼地面展开运动平稳,所有铰链均锁定良好,验证了二维太阳翼展开试验装置设计的正确性及工作性能,试验前后吊挂绳索中的张力见表3,太阳翼展开后绳索张力与展开前基本一致,最大变化量不超过1 N,说明了此二维太阳翼地面展开试验装置可有效实现其地面二维展开过程中的重力卸载。
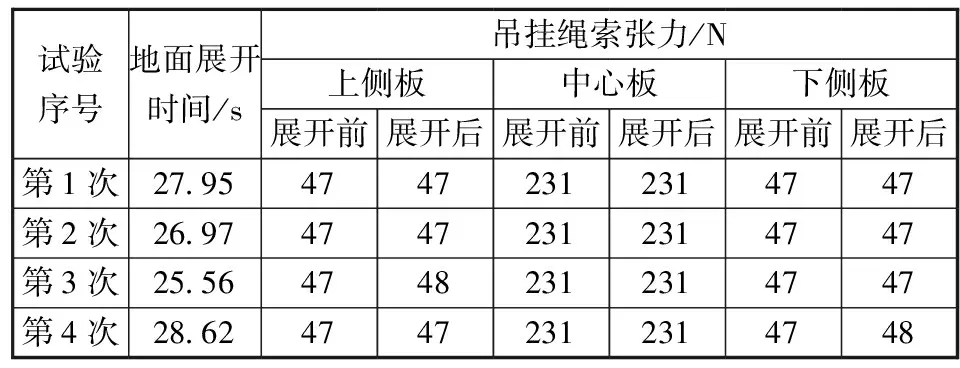
表3 太阳翼地面展开试验数据
5 结论
本文设计了一种适用于二维展开太阳翼地面展开试验装置,并进行了动力学分析及试验验证,可得到以下结论。
(1)本文所设计的二维展开试验装置结构简单,可以连续实现二维太阳翼各部件在一次和二次展开过程中水平面内和竖直面内的重力卸载,无需中间更换工装。
(2)建立了太阳翼和地面展开试验工装的展开动力学模型,考虑了工装质量、摩擦阻力以及空间阻力的影响,分析得到除太阳翼一次和二次锁定前后瞬间外,其余展开过程中吊挂绳索张力最大变化量仅为7%,展开结束后,各电池板吊挂绳索的张力变化最大不超过2%。
(3)由某二维太阳翼在本试验装置上展开前后试验结果可知,太阳翼各电池板吊挂绳索中的张力变化最大仅1 N,变化量仅2.1%,与分析结果一致,说明本二维太阳翼地面展开试验装置可有效实现太阳翼在地面展开前后的重力卸载。
随着航天技术的发展,越来越多的空间机构具有二维甚至多维展开功能,对地面展开试验也提出了较高的挑战,本文设计的太阳翼地面展开试验装置实现方式简单可靠,可为这些展开机构的地面展开验证提供必要的技术参考。
