零部件研发风险识别与分析
2022-02-19李春关庆龄喻修其许莹
李春,关庆龄,喻修其,许莹
(中海油田服务股份有限公司,河北 三河 065201)
0 引言
随着国内制造业的蓬勃发展,石油行业机械零部件自主研发数量急剧增加。在研发中应做好风险辨识与分析以保证研发效果。本文以船位仪为例阐述零部件研发的风险识别与分析过程。
船位仪应用在半潜式钻井平台,其功能是在平台作业过程中,利用水声技术监视平台与井口的水平方向相对位移,为船长操船提供依据。船位仪系统功能多、技术复杂,涉及到多个技术领域,如深海低功耗应答器设计、宽带超短基线目标定位技术、超短基线阵设计及防海洋生物设计技术、信号传输抗干扰技术、超短基线阵校准技术等。进行该项目的风险分析与评估是保证项目研制成功的必要条件之一,可为项目研制进程中的各种管理决策提供参考,又可通过预见风险从而实施风险规避,进而在制造、生产、维修保障等各个环节中,能有效地控制或消除风险,达到降低损失、控制成本的目的。
1 风险评估
1.1 风险辩识
零部件研制风险辨识采用分解分析法结合流程分析法完成。以船位仪为例,先将船位仪分解为零部件,再按研制应用流程对风险进行辨识和分析,并制定预防措施。分解分析法是指将一复杂的事物分解为多个比较简单的事物,将大系统分解为具体的组成要素,从中分析可能存在的风险及潜在损失的威胁。船位仪系统按工程及模块分解为深海应答部件、信号接收处理部件、超短基线阵部件、后置处理显控部件等几部分,如图1所示。
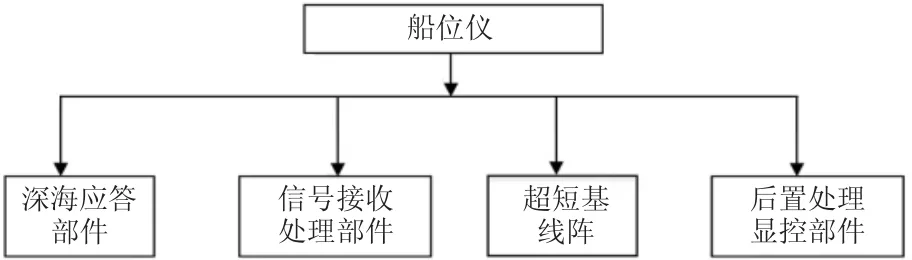
图1 主要零部件构成
流程分析法是指在研制投产过程中,从设计开发到成品产出,通过一定的设备按顺序连续地进行加工的过程。该种方法强调根据不同的流程,对每一阶段和环节逐个进行调查分析,找出风险存在的原因。船位仪系统总体分成设计阶段、试制阶段、实验使用阶段、维修保障阶段等4个流程。项目的风险区或风险技术过程考虑如表1所示。根据其使用的条件、环境、性能指标要求进行分析,收集风险信息,总结出可能对系统或功能组件产生风险的事件或因素,并研究采取应对措施[1]。
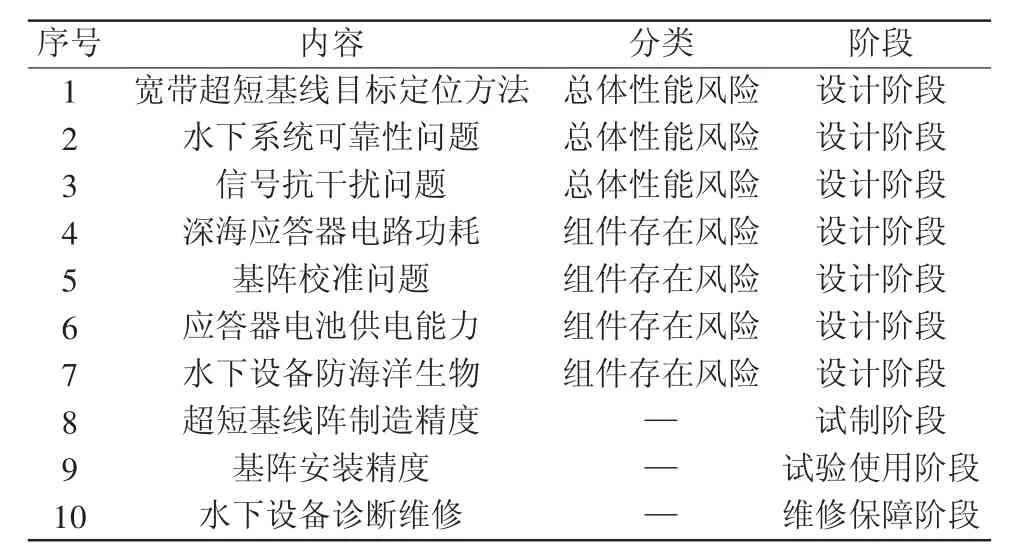
表1 项目的风险区或风险技术过程
1.2 风险分析及纠正
1.2.1 设计阶段风险分析
1)分析方法。完成分解及流程拆解后,在实际研发过程中,通过风险辩识,认为该系统有10个风险。采用专家技术定性评估法对上述风险进行分析评估[2],同时制定纠正预防措施。
2)宽带超短基线目标定位方法风险。风险描述:在进行超短基线目标定位时,如果方法选取不当,信号抗干扰能力差,在深海复杂条件下,信噪比不是太好时,难以保证信号检测和相位估计的精度;同时为克服相位跨周期、产生相位估计模糊,必须通过增加水听器基元才能解决,使基阵更加复杂。纠正措施:在超短基线定位中,采用宽带信号进行定位是近年来发展的重要方向,其原理为利用基阵阵元间的时延差进行定位。宽带信号抗干扰能力强,同时通过提高采样率和相关峰时延内插技术,在一定的信噪比条件下可以实现两路信号时延差的精确估计,精度优于采样周期的一半,本系统拟采用宽带超短基线目标定位技术[3]。
3)水下部件可靠性风险。风险描述:应答器和超短基线阵等设备置于水下长期使用,因此系统电子部件的可靠性和水密桶等机械部件的水密特性特别重要,一旦出现问题,将给整个系统造成影响。纠正措施:从每一级组部件、每一个质量环节严格抓起,充分认识到使用环境的恶劣性给系统带来的影响。电子器件按可靠性要求进行老化筛选,开展系统的环境试验,新研制的应答器电路和超短基线阵内电路要体积小巧、可靠性高,满足海上长期颠簸环境下及深水条件下的使用。
4)信号抗干扰风险。风险描述:钻井平台上工作环境复杂,信号的干扰包括噪声干扰和电磁干扰。纠正措施:a.工作频率的确定。应充分考虑平台的工作环境和海洋的声学环境。由于低频段受到钻井机械等设备的强噪声源的干扰,工作频段的选取应避开该频段,尽可能选高端频率。而高频段又对信号传输不利,特别在海水中,随着频率的升高,信号的衰减明显加大,因此高端又受到信号传输的限制。综合两方面因素,选择20 kHz左右的频段作为工作频段较为合适[4]。b.环境噪声干扰。对平台上的机械设备施工和周围船只航行带来的噪声干扰,以及信号对海面及平台的反射干扰,可通过声学基阵接收指向性设计加以部分消除。c.平台上的电磁干扰。由于平台大型设备较多,工作环境恶劣,加之本船位仪湿端、干端之间的距离较远,走线路径不确定,因此信号在传输过程中很可能受到不明干扰源的干扰。为此,本系统的微弱信号通过放大后差分传输,数据由RS485或RS422口完成传输,保证了命令和控制信息的下传不受干扰。通过采取上述设计技术,再加上对信号处理机箱的电磁兼容性设计,有效地解决系统的干扰问题。
5)深海应答器电路功耗风险。风险描述:作业工况要求应答器在一个作业周期内长期放置于水下,一般在90 d以上,功耗大导致应答器不能完成既定作业即失效。纠正措施:应答器电路组件包括了模拟、数字及控制电路,为保证应答器布放后能更长时间地工作,必须采用低功耗电路设计技术。经对数字电路DSP的运算量的计算,和应答器电路工作环境的分析,应答器的电路设计主要采用3.3 V的低压电路芯片,此类芯片的功耗明显低于5 V芯片,可满足系统对功耗的要求,同时又可满足运算速度的要求。
6)基阵校准风险。风险描述:超短基线基元的机械安装会存在一定的误差,由于水听器加工的不均匀性,其声学中心与几何中心也存在差异,这些均给系统带来了附加相移(时延),造成性能指标下降。纠正措施:在使用前通过测量进行修正。对声学基阵的校准,可以采用声学的方法进行[5]。实际使用前在湖上对基阵进行校准,采用GPS测量数据与水声测量数据进行比对的方法,运用最小二乘原理,以GPS测量数据为基准,对基阵参数和安装偏差进行测量和校准。
7)应答器电池供电能力不足风险。风险描述:电池供电能力不足而不能满足为系统提供连续工作90 d以上的电能。纠正措施:优选能力密度比较高的锂离子电池组,同时水下电池采用冗余设计,增加电池单元。在上位机软件设计中增加了对应答器电池电压的信息遥测功能,能方便、实时地了解电池状况,以便及时充电。
8)水下设备海洋生物侵蚀风险。风险描述:系统水下设备长期置于水下,受海洋生物影响较大,换能器一旦被海洋生物所覆盖,则系统无法正常工作。纠正措施:换能器生产过程中添加化学制剂,防止海洋生物寄生在换能器表面,保证系统正常工作。
1.2.2 试制阶段风险分析
风险描述:根据对超短基线阵的性能要求和使用环境的分析,超短基线阵制造精度是该系统试制阶段的风险。超短基线阵的精度低,导致产品测量不准确,难以满足生产需求。纠正措施:超短基线阵要精确设计、制造,在完成加工后,进行水池测试,精确测量基阵孔径、正交性、基元共面度等参数,在湖上系统校准试验中对各项误差进行综合测量。
1.2.3 试验使用阶段风险分析
风险描述:试验使用阶段的风险主要是基阵安装精度。由于基阵安装误差、基阵倾斜等因素对系统定位测量带来影响,导致设备最终定位数据偏差较大。纠正措施:对基阵的安装偏差进行校准,以保证系统的水平定位性能考核准确性。校准工作可在停泊于岸边的工作母船上进行,由可编程信号源发射模拟应答信号,DGPS配合标校出基阵水平安装偏角,基阵的姿态倾斜由安装于超短基线阵中的高精度姿态传感器测量得到[6]。
1.2.4 维修保障阶段风险分析
风险描述:维修保障阶段的风险主要是水下设备的诊断维修,整套设备工作在水面以下,出现问题不宜实时取出诊断。纠正措施:超短基线阵的姿态、深度、水温等参数都可由上位机软件实时获取;应答器的信息可通过水声遥测获得。实现远程诊断。故障定位准确的情况下通过更换零件或元器件解决问题,故障判断不够准确或紧急情况下通过更换相关部件解决问题。
2 结论
设备、工具及零部件研制过程中的风险是客观存在的,对风险的分析和评价是主观、客观结论相结合的过程,且在研发过程中各风险因素之间存在相互关联,对某些过程中潜在风险因素的评估也很难用定量数字来描述,本文对明确认识到的风险或某些潜在的风险因素进行了定性分析,并提出了相应的规避办法。实际研制过程中采用了专家评估法对本项目风险作了定性分析,在研制过程中强化风险意识,以便在零部件及设备系统研制过程中做出正确的决策,防患于未然,为保证零部件及设备系统研制成功提供了更大的保障。
